
Extrinsic Parameter Self-Calibration and Nonlinear Filtering for
in-Vehicle Stereo Vision Systems at Urban Environments
Basam Musleh, David Martín, José María Armingol and Arturo de la Escalera
Intelligent System Lab, University Carlos III de Madrid, Leganés, Spain
Keywords: Advanced Driver Assistance Systems, Stereo Vision, Computer Vision, Unscented Kalman Filter.
Abstract: Present work analyses the continuous self-calibration of extrinsic parameters of a stereo vision system for
safe visual odometry applications in vehicles at urban environments. The calibration method determines the
extrinsic parameters of a stereo vision system based on knowing the geometry of the ground in front of the
cameras. The slight changes of the road profile cause variations in the extrinsic parameters of stereo rig that
are necessary to filter and maintain between tolerance values. Then, height, pitch and roll parameters are
filtered, to eliminate pose outliers of the stereo rig that appear when a vehicle is maneuvering. The reliable
approach at urban environment is firstly composed of the calculation of the road profile slope, the
theoretical horizon, and the slope of the straight line in the free map. Secondly, the nonlinear filtering is
applied using Unscented Kalman Filter to improve the estimation of height, pitch and roll parameters.
1 INTRODUCTION
The advanced driver assistance systems (ADAS) and
autonomous vehicles require safe applications to be
integrated progressively in vehicles towards the
burgeoning driverless vehicle industry. These safe
applications are mainly based on stereo vision
systems (Musleh et al., 2012b; Llorca et al., 2012).
In-vehicle stereo vision systems are fostering the
development of new applications for Intelligent
Vehicles, allowing these vehicles to aid the driver in
maneuvers such as pedestrian safety in urban
environments. The advancements in these mentioned
technologies are being extended nowadays to solve
complex tasks in the forthcoming Intelligent
Transportation Systems, which require normally the
combination of sensors and computation to
accomplish a reliable solution. Then vision-based
sensors have to cope with the correspondence
between the position of the objects in the world and
its projection in the image plane, and it is possible
by means of the intrinsic and extrinsic parameters of
the camera. The intrinsic parameters are those
related to the camera-optic set and are normally
determined by stereo rig maker.
The extrinsic parameters are formed by height
and orientation related to the ground in front of the
cameras to compose the pose of the stereo vision
system. The utilization of in-vehicle stereo rig
implies changes of these extrinsic parameters
according to the road profile, the trajectory of the
vehicle and vehicle dynamics (Dornaika and Sappa,
2009; Turnip et al., 2009). The estimation of the
pose of the in-vehicle stereo vision system can be
calculated by the use of a calibration pattern that is
positioned on the ground (Marita et al., 2006; Hold
et al., 2009a), or painted in the hood of the vehicle
(Broggi et al., 2001). There are authors that prefer to
use the landmarks of the road (Hold et al., 2009b),
(Li and Hai, 2011), such as traffic lines (Collado et
al., 2006), making easier the calibration process and
updating continuously the extrinsic parameters.
However, the landmarks cannot be detected caused
by degraded landmarks or occluded by other
elements, such as parked vehicles. The method that
is utilized in this work is based on the geometry
estimation of the ground in front of the vehicle
(Labayrade and Aubert, 2003; Wang et al., 2010).
So, road geometry makes possible to calculate the
extrinsic parameters avoiding the use of a calibration
pattern or landmarks on the road.
The nonlinear filtering used in this work is based
on Unscented Kalman Filter (UKF) that improves
the estimation of height, pitch and roll parameters.
The typical approach with respect to estimation
algorithms has traditionally involved Extended
Kalman Filters (EKF) to linearize the process and
measurement models, usually involving highly
427
Musleh B., Martin D., Armingol J. and De La Escalera A..
Extrinsic Parameter Self-Calibration and Nonlinear Filtering for in-Vehicle Stereo Vision Systems at Urban Environments.
DOI: 10.5220/0004655804270434
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 427-434
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

nonlinear equations to relate coordinate frame
transformations in the measurement model.
However, this model relies on linear approximation
of a nonlinear system, a complicated mathematical
task that sometimes leading to bad performance
(Wagner, 2005). Nowadays, with the availability of
more computation power, recent works have
employed more advanced techniques, like the
Unscented Kalman Filter to avoid linearization
while providing estimates that capture the statistics
of the target distribution more accurately (Crassidis
and Markley, 2003; Zhou et al., 2010). An integrated
approach to simultaneous attitudinal and positional
estimation is described by Van der Merwe (Van der
Merwe et al., 2004), who apply a UKF to estimate a
joint Gaussian distribution over orientation and
position for an unmanned aerial vehicle (UAV). The
resulting filter is found to be more accurate than an
EKF used for the same purpose. A constrained
unscented Kalman filter algorithm has been
proposed in (Li and Leung, 2003) to fuse differential
GPS, INS (gyro and accelerometer) and digital map
to localize vehicles for ITS applications. The state
vector includes accelerometer and gyro biases, and
the UKF nonlinear character is employed to include
some state constraints from the surface geometry.
Other advanced nonlinear filtering has been applied
recently in navigation, e.g., the context-aided sensor
fusion for enhanced urban navigation (Martí et al.,
2012), where the main contribution is the proposal
of a robust and adaptable solution, exploiting the
good trade-off between nonlinear estimation and
efficiency of UKF, and including explicit domain
knowledge.
This paper presents a self-calibration method
based on nonlinear filtering to determine
continuously the extrinsic parameters of a stereo
vision system using the geometry of the road ground
in front of the in-vehicle stereo rig. The disparity
map (Scharstein and Szeliski, 2002) and the u-v
disparity (Labayrade et al., 2002; Hu et al., 2005) are
used in order to distinguish between image points
belonging to the ground and the ones which belong
to the obstacles (Musleh et al., 2012a). Moreover,
two methods have been selected for comparison, the
first one uses Hough Transform (HT) and the second
one the Random Sample Consensus (RANSAC)
(Fischler and Bolles, 1981). These methods allow
both calculations of the road profile slope (C
r
), the
theoretical horizon (v
Δ0
), and the slope of the straight
line in the free map (C), that lead to both estimations
of the height (h), pitch (θ) and roll (ρ) using
Unscented Kalman Filter for each frame of stereo rig
and considering constant in-vehicle yaw deviation.
This paper is organized as follows: Section 2
describes data set and vehicle parameters. The
section 3 explains the self-calibration method to
obtain continuously the extrinsic parameters. Section
4 describes the nonlinear method based on
Unscented Kalman Filter for filtering extrinsic
parameters. Finally, Section 5 provides results to
demonstrate the proposed method, and conclusions
are presented in Section 6.
2 DATA SET AND VEHICLE
PARAMETERS
In-vehicle stereo rig images have been extracted
from the visual odometry benchmark of Karlsruhe
Institute of Technology that consists of 22 stereo
sequences (Geiger et al., 2012), where we have
selected the sequence 7 to test our self-calibration
method. The sequence 7 is captured by 2 Grayscale
cameras, 1.4 Megapixels, Point Grey Flea 2 (FL2-
14S3M-C), and is composed with 1100 stereo rig
images, that have been acquired when a Volkswagen
Passat B6 performs a trajectory of approximately 0.7
km in Karlsruhe residential environment. Cameras
are mounted approximately level with the ground
plane and are triggered at 10 frames per second.
Stereo rig images have a size of 1226 x 370 pixels
after rectification. Moreover, we can compare the
result of our continuous self-calibration of extrinsic
parameters with additional information of this
dataset, which contains height, pitch and roll
measurements of the vehicle provided by Inertial
Navigation System (GPS/IMU OXTS RT 3003).
3 SELF-CALIBRATION OF
EXTRINSIC PARAMETERS
The extrinsic parameters are continuously calculated
using geometry of the road ground for self-
calibration. So we present here the equations that
allow us obtain height (h), pitch (θ) and roll (ρ)
based on geometry of the road ground. The
equations consider constant in-vehicle yaw deviation
to simplify demonstration, so we establish constant
angle estimation in this work.
The in-vehicle stereo rig has two cameras, where
image planes are coplanar and epipolar lines are
parallel. Then, the aim is to obtain the homogeneous
image coordinates (u
i
·S, v·S, S, 1) of a world point P
= (X, Y, Z, 1), equations (1– 6), following Labayrade
nomenclature (Labayrade and Aubert, 2003).
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
428
·····
11
i
proj Translx Rotx Rotz Transly
uS X
vS Y
MM MMM
SZ
(1)
0
0
00
00
00
(, , )
00 10
00 01
proj
u
v
Muv
(2)
100
010 0
()
001 0
000 1
i
Translx i
b
Mb
(3)
10 0 0
0cos sin 0
()
0sin cos 0
00 0 1
Rotx
M
(4)
cos sin 0 0
sin cos 0 0
()
0010
0001
Rotz
M
(5)
1000
010
()
0010
0001
Transly
h
Mh
(6)
The subindex i can be selected for both cameras
(r = right camera and l = left camera) and we
consider ε
r
= 1 and ε
l
= 0, therefore the projection of
the world point P over the left image plane is (u
l
, v
l
)
and the right image projection is (u
r
, v
r
). The
baseline between both cameras is b, the coordinates
of the optical center are (u
0
, v
0
), and the focal length
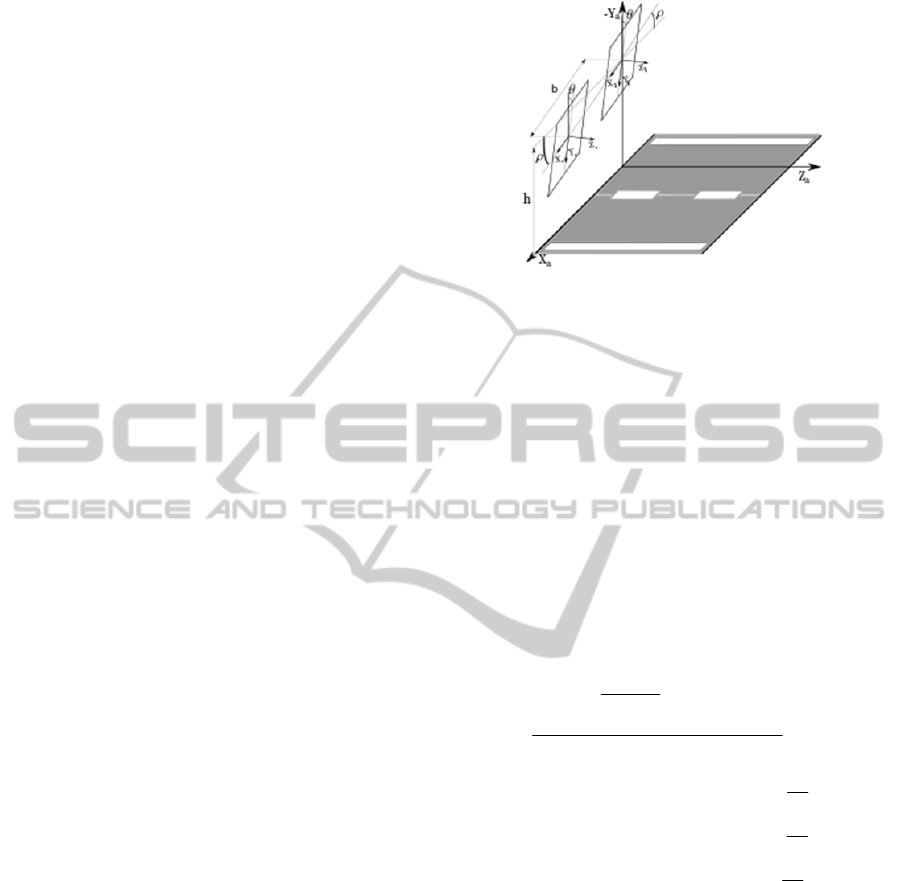
in pixels is indicated by letter α (see Fig. 1). The
movement of the vehicle implies angle variations of
the in-vehicle stereo rig related to ground reference,
so pitch angle rotates around axis X (perpendicular
direction to moving forward of vehicle) and roll
angle rotates around axis Z (direction of vehicle
moving forward). The third extrinsic parameter is
height, which has a constant value from ground
when vehicle is stopped, but height oscillates around
its constant value when vehicle is driving.
The disparity (Δ) is the difference between the
horizontal image coordinates of the world point in
both image planes. The value of u
r
·S for the right
camera and u
l
·S for the left one is calculated through
(1) to (6).
Then, we can easily obtain the disparity
expression (Δ) for each world point P = (X, Y, Z, 1)
Figure 1: Schema of the in-vehicle stereo rig
configuration.
by (7). Following, we calculate the inverse
relationship between world points and left image
coordinates obtaining inverse expressions (8). It can
be observed also that road ground in front of the in-
vehicle stereo rig corresponds to every world point
which world coordinate Y is equal to zero. Thus, we
would find the expression of world coordinate Y as a
function of the coordinates of the image, the
extrinsic and intrinsic parameters of the stereo
system {α, b, u
0
, v
0
, h, θ, ρ}, and the disparity (Δ)
(8). However, the value of S is a function of the
world coordinates (X, Y, Z) (1). So, in order to avoid
the use of the world coordinates, S can be expressed
as S = -α·b/Δ by means of (7).
·
cos ( )cos sin sin sin
lr
lr
uS uS
uu
S
b
ZYh X
(7)
11111
··· ··
1
1
Transly Rotz Rotx Translx proj
b
u
X
b
Y
v
MMMMM
Z
b
(8)
So, equation (9) shows the relationship between
the image coordinates (u, v) for the world points of
the road ground. This equation (9) is a straight line
whose expression is v = C·u+d for the different
values of disparity Δ. The roll angle is normally low
in urban environments, so cosρ ≈ 1 and sinρ ≈ 0,
which simplifies expression (9) to obtain (10).
Moreover, equation (10) is another straight line,
which is achieved from the v-disparity and named
road profile (Labayrade et al., 2002), which
describes the relationship between image vertical
coordinate (v) and disparity (Δ), being v = C
r
·Δ+v
Δ0
,
where C
r
is the slope and v
Δ0
is the value of v when
the disparity is Δ = 0 (theoretical horizon).
ExtrinsicParameterSelf-CalibrationandNonlinearFilteringforin-VehicleStereoVisionSystemsatUrbanEnvironments
429

0
0
00
()coscos
()sin
cos sin
0
tan
() ( )
cos
tan
cos cos
vvb
Yh
uub
b
vv uu
h
b
(9)
0
tan
cos
h
vv
b
(10)
Finally, we calculate the pitch angle (θ) with
expression (11) and height (h) by (12) using
obtained road profile. The roll angle (ρ) is estimated
by means of the free map, which is only the road
ground part (without obstacles) of the disparity map.
Equation (9) is used again, but here is applied to the
free map to detect another straight line v = Cu+d
Δ
,
utilizing a constant value of disparity Δ, extracted
from a close area of the vehicle. Then, the roll angle
is estimated knowing the slope C of the free map
straight line by means of equation (13).
00
arctan
vv
(11)
··cos
r
hCb
(12)
tan
arctan ·cos
cos
CC
(13)
Then, the estimation of the road profile slope
(C
r
), the theoretical horizon (v
Δ0
), and the slope of
the straight line in the free map (C) using Hough
Transform or RANSAC in equations (11), (12) and
(13), allow the continuous estimation of height (Fig.
2(a)), pitch angle (Fig. 2(b)), and roll angle (Fig.
2(c)) of the vehicle through whole trajectory.
4 NONLINEAR METHOD FOR
FILTERING EXTRINSIC
PARAMETERS
The UKF is an algorithm that belongs to Kalman
family. So, following the basic Kalman filter theory,
it is a recursive algorithm that estimates the state
k
x
ˆ
of discrete-time dynamic system (Julier and
Uhlmann, 2004), which is composed by observable
variables (the road profile slope (C
r
), the theoretical
horizon (v
Δ0
), and the slope of the straight line in the
free map (C)), and hidden variables (the height (h),
pitch (θ) and roll (ρ)). Fig. 3 displays the block
diagram of the estimation process of extrinsic
parameters of in-vehicle stereo rig.
Figure 2: Height (h), pitch angle (θ) and roll angle (ρ)
estimation.
The state vector for UKF filtering of height,
pitch and roll is expressed as follows (14):
T
kkkk
hx
(14)
where h
k
is the height on time step k, θ
k
is the pitch
angle on time step k, and ρ
k
is the roll angle on time
step k.
The estimation is described like a multivariate
Gaussian distribution with mean x
k
and covariance
P
k
. The filter uses a mathematical description of the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
430

Figure 3: Block diagram with UKF measurement model.
system evolution over time, that is the prediction
process (15),
kkk
vxfx ,
ˆˆ
1
(15)
but we unknown the complex dynamic model of
vehicle that has been used in experiments, so we
simplify the prediction process considering previous
state estimation and v
k
~ Ν(0, R
v
) represents a
process noise distributed as a Gaussian with mean
zero and covariance matrix R
v
(16):
8
0.01 0 0
0110 0
0 0 0.01
v
R
(16)
where covariance values are small due to urban
environment, since we don’t expect large changes in
process update. So, slightly changes are considered
around former estimated state in process update.
However, we know observable variables, which
are continuously calculated from stereo images.
These observations of the true state are transformed
by a known measurement model (17), and perturbed
by a random sample of the observation noise w
k
~
Ν(0, R
w
) (18). Observation noise matrix is similar to
that has been applied to process noise, but here
covariance values are higher to eliminate the outliers
of the measurements. Following, this information
due to such observations is integrated into state
estimation during UKF process update.
kkk
wxhy ,
ˆˆ
(17)
100
010
001
w
R
(18)
UKF algorithm allows continuously the
utilization of a nonlinear measurement model to
filter outliers of extrinsic parameters. So, the
purpose of nonlinear UKF is reliable estimation of
height, pitch and roll extrinsic parameters to
improve the performance of in-vehicle stereo vision
systems, using former expressions (11), (12), (13)
and road geometry: (i) the road profile slope (C
r
),
(ii) the theoretical horizon (v
Δ0
), and (iii) the slope of
the straight line in the free map (C). The constants of
equations, that have been utilized in this work, are: b
= 0.54 m, v
0
= 183.1104 pixels, and α = 707.0912
pixels. Therefore, we use the UKF filter to estimate
height, pitch and roll nonlinear signals, which are
perturbed by outliers that come from road geometry
estimation of the ground in front of the vehicle. The
nonlinearity of the extrinsic parameters is expressed
by the measurement model, which is composed of
inverse former expressions (19), (20), (21). This
approach simplifies UKF prediction process, while
dynamic suspension model of the vehicle is
unknown. So, it is possible to propagate the current
state through nonlinear measurement functions to
obtain the actual measurement.
0.54cos
r
h
C
(19)
0
183.1104 707.0912 tanv
(20)
tan
cos
C
(21)
5 RESULTS
The results of extrinsic parameter self-calibration
method and their nonlinear filtering are shown in
this section. The stereo sequence captured by in-
vehicle stereo rig has been processed using two
methods to obtain the estimation of the geometry of
the ground in front of the cameras, that is, using
Hough Transform or RANSAC to obtain C
r
, v
Δ0
, C
parameters. So, results are separated, Fig. 4 displays
extrinsic parameter self-calibration and nonlinear
filtering using C
r
, v
Δ0
, C parameters from Hough
Transform, and Fig. 5 shows extrinsic parameter
self-calibration and nonlinear filtering using C
r
, v
Δ0
,
C parameters by means of RANSAC.
Height (Fig. 4(a)), pitch angle (Fig. 4(b)) and roll
angle (Fig. 4(c)) extrinsic parameters present
enormous outliers (red color), where it can be
observed the overall performance of the proposed
UKF filter (blue color) through whole sequence of
1100 frames. It is difficult to appreciate local
performance of the UKF filter in these three graphs,
so detail of the trajectory are in (Fig. 4(d)), (Fig.
4(e)), and (Fig. 4(f)) graphs.
Detail graphs belong to 100 frames of the
trajectory [640 - 740] that include stopped vehicle
ExtrinsicParameterSelf-CalibrationandNonlinearFilteringforin-VehicleStereoVisionSystemsatUrbanEnvironments
431

from sequence frame 665 to 715. Detail graphs when
vehicle is stopped, allow to establish comparison
between Hough Transform and RANSAC methods,
and comparison with high-accuracy measurements
(black color) of Inertial Navigation System
(GPS/IMU OXTS RT 3003). The roll/pitch accuracy
of OXTS system is 5.236·10
-4
rad 1σ. The altitude
measurements of OXTS device are used to calculate
the height changes of the vehicle, by simple
subtraction of consecutive altitude measurements.
The maximum accuracy of OXTS altitude is 2 cm
1σ L1/L2.
Figs. 4(d-f)) display outliers when vehicle is
stopped and the good performance of UKF filter to
eliminate wrong estimations of extrinsic parameters.
In comparison with INS OXTS reference, height
estimation (Fig. 4(d)) presents a deviation of 0.2 m
from 1.65 m (height of the in-vehicle stereo rig over
ground), pitch angle estimation (Fig. 4(e)) has again
deviation, and roll angle estimation (Fig. 4(f)) shows
good performance around 0 rad, where it can be
observed an INS small bias of 0.02 rad caused by
road slope for water drainage.
Height (Fig. 5(a)), pitch angle (Fig. 5(b)) and roll
angle (Fig. 5(c)) extrinsic parameters calculated by
RANSAC present again outliers, as can be observed
are different outliers from Hough method, but
outliers are eliminated again by UKF filter through
whole sequence. Moreover, the detail graphs show
better performance than former Hough results. Fig.
5(d) presents height UKF filtering around 1.65 m
with minimal error when vehicle is stopped. Pitch
angle filtering (Fig. 5(e)) shows good result in
comparison with INS OXTS reference (bias of 0.015
rad), and roll angle filtering (Fig. 5(f)) presents
again minimal deviation around 0 rad, as constant
INS OXTS reference is 0.02 rad.
6 CONCLUSIONS
In this article, extrinsic parameters have been
estimated continuously for the self-calibration of in-
vehicle stereo rig, as an essential task for Intelligent
Transportation Systems in urban environments.
Extrinsic parameter results have demonstrated the
feasibility of the geometry estimation of the ground
in front of the vehicle using RANSAC method.
Moreover, the accuracy improvement of the height,
pitch angle and roll angle measurements, by means
of the elimination of outliers, have been
accomplished using nonlinear UKF filtering based
on nonlinear measurement model. These results have
Figure 4: (a) Height, (b) pitch angle, (c) roll angle extrinsic parameters through whole sequence of 1100 frames using
continuous estimation of C
r
, v
Δ0
, C parameters by Hough Transform method, and (d) height, (e) pitch, (f) roll details from
100 frames of sequence with stopped vehicle during 50 frames.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
432

Figure 5: (a) h, (b) θ, (c) ρ UKF filtering using estimations of C
r
,v
Δ0
,C by RANSAC, and (d) h, (e) θ, (f) ρ details from 100
frames.
been validated through time-domain comparison
with high-accuracy measurements, which have been
provided by an in-vehicle INS device.
This approach is composed of continuous
parameter estimation and UKF filter that will lead to
use safe applications based on in-vehicle stereo
vision systems. Such as visual odometry for local
vehicle positioning that can be used in forthcoming
urban navigation.
ACKNOWLEDGEMENTS
This work was supported by the Spanish
Government through the CICYT projects GRANT
TRA2010-20225-C03-01 and GRANT TRA 2011-
29454-C03-02.
REFERENCES
Broggi, A., Bertozzi, M., Fascioli, A., 2001. Self-
calibration of a stereo vision system for automotive
applications. In Proc. IEEE International Conference
on Robotics and Automation, vol. 4, pp. 3698–3703.
Collado, J. M., Hilario, C., de la Escalera, A., Armingol,
J.M., 2006. Self-calibration of an on-board stereo-
vision system for driver assistance systems. In Proc.
IEEE Intell. Veh. Symposium, pp. 156–162.
Crassidis, J. L., Markley, F. L., 2003. Unscented Filtering
for Spacecraft Attitude Estimation. AIAA J. Guid.
Control. Dyn., vol. 26, pp. 536–542.
Dornaika, F., Sappa, A. D., 2009. A featureless and
stochastic approach to on-board stereo vision system
pose. Image and Vision Computing, vol. 27, pp. 1382–
1393.
Fischler, M. A., Bolles, R. C., 1981. Random sample
consensus: a paradigm for model fitting with
applications to image analysis and automated
cartography. Com. of the ACM, no. 6, 381–395.
Geiger, A., Lenz, P., Urtasun, R., 2012. Are we ready for
Autonomous Driving? The KITTI Vision Benchmark
Suite. In Proc. Computer Vision and Pattern
Recognition (CVPR), USA, pp. 3354–3361.
Hold, S., Nunn, C., Kummert, A., Muller-Schneiders, S.,
2009. Efficient and robust extrinsic camera calibration
procedure for lane departure warning. In Proc. IEEE
Intell. Veh. Symposium, pp. 382–387.
Hold, S., Gormer, S., Kummert, A., Meuter, M., Muller-
Schneiders, S., 2009. A novel approach for the online
initial calibration of extrinsic parameters for a car-
mounted camera. In Proc. 12th International IEEE
Conference on Intelligent Transportation Systems, St.
Louis, MO, USA, pp. 420–425.
Hu, Z., Lamosa, F., Uchimura, K., 2005. A complete uv-
disparity study for stereovision based 3d driving
environment analysis. In Proc. Fifth Int. Conf. on 3-D
Digital Imaging and Modeling, pp. 204–211.
ExtrinsicParameterSelf-CalibrationandNonlinearFilteringforin-VehicleStereoVisionSystemsatUrbanEnvironments
433

Julier, S. J., Uhlmann, J.K., 2004. Unscented Filtering and
Nonlinear Estimation. Proceedings of the IEEE,
vol.92, pp. 401 - 422.
Labayrade, R., Aubert, D., Tarel, J.P., 2002. Real time
obstacle detection in stereovision on non flat road
geometry through v-disparity representation. In Proc.
IEEE Intell. Veh. Sym., pp. 646–651.
Labayrade, R., Aubert, D., 2003. A single framework for
vehicle roll, pitch, yaw estimation and obstacles
detection by stereovision. In Proc. IEEE Intelligent
Vehicles Symposium, pp. 31–36.
Li, S., Hai, Y., 2011. Easy calibration of a blind-spot-free
fisheye camera system using a scene of a parking
space. IEEE Transactions on Intelligent
Transportation Systems, vol. 12, no. 1, pp. 232–242.
Li, W., Leung, H., 2003. Constrained Unscented Kalman
Filter Based Fusion of GPS/INS/Digital Map for
Vehicle Localization. In Proc. IEEE 2003
International Conference on Intelligent
Transportation Systems, Shanghai, China, 12–15, vol.
2, pp. 1362–1367.
Llorca, D. F., Sotelo, M. A., Hellín, A. M., Orellana, A.,
Gavilán, M., Daza, I. G., Lorente, A. G., 2012. Stereo
regions-of-interest selection for pedestrian protection:
A survey. Transportation Research Part C, vol. 25,
pp. 226–237.
Marita, T., Oniga, F., Nedevschi, S., Graf, T., Schmidt, R.,
2006. Camera calibration method for far range
stereovision sensors used in vehicles. In Proc. IEEE
Intelligent Vehicles Symposium, pp. 356–363.
Martí, E. D., Martín, D., García, J., de la Escalera, A.,
Molina, J.M., Armingol, J. M., 2012. Context-aided
Sensor Fusion for Enhanced Urban Navigation.
Sensors, vol. 12, no. 12, pp. 16802-16837.
Musleh, B., de la Escalera, A., Armingol, J. M., 2012. U-v
disparity analysis in urban environments. In Proc.
Computer Aided Systems Theory EUROCAST 2011,
vol. 6928 of LNCS, pp. 426–432.
Musleh, B., Martin, D., de la Escalera, A., Armingol, J.
M., 2012. Visual Ego Motion Estimation in Urban
Environments based on U-V Disparity. In Proc. 2012
IEEE Intelligent Vehicles Symposium, Alcalá de
Henares, Spain, pp. 444–449.
Scharstein, D., Szeliski, R., 2002. A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
vol. 47, no. 1, pp. 7–42.
Turnip, A., Nguyen, L.H., Hong, K.-S., 2009. Detection of
Critical Driving Situations Based on Wheel-Ground
Contact Normal Forces. In Proc. ICROS-SICE Inter.
Joint Conf., Japan, pp. 2519–2524.
Van der Merwe, R., Wan, E.A., Julier, S.I., 2004. Sigma
Point Kalman Filters for Nonlinear Estimation and
Sensor Fusion: Applications to Integrated Navigation.
In Proc. AIAA Guidance, Navigation and Control
Conf., Providence, RI, USA, pp. 1735-1764.
Wagner, J. F., 2005. GNSS/INS integration: still an
attractive candidate for automatic landing systems?.
GPS Sol., vol. 9, pp. 179–193.
Wang, Q., Zhang, Q., Rovira-Mas, F., 2010. Auto-
calibration method to determine camera pose for
stereovision-based off-road vehicle navigation.
Environ. control in biol., vol. 48, no. 2, pp. 59–72.
Zhou, J., Knedlik, S., Loffeld, O., 2010. INS/GPS Tightly-
coupled Integration using Adaptive Unscented Particle
Filter. J. Navig., vol. 63, 491–511.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
434
