
Lazy Work Stealing for Continuous Hierarchy Traversal on Deformable
Bodies
Vin
´
ıcius da Silva, Claudio Esperanc¸a and Ricardo Guerra Marroquim
COPPE, Federal University of Rio de Janeiro, Hor
´
acio Macedo Avenue 2030, Rio de Janeiro, Brazil
Keywords:
Dynamic Load Balance, Continuous Collision Detection, Deformable Bodies, GPGPU.
Abstract:
This study presents the results of research in dynamic load balancing for Continuous Collision Detection
(CCD) using Bounding Volumes Hierarchies (BVHs) on Graphics Processing Units (GPUs). Hierarchy traver-
sal is a challenging problem for GPU computing, since the work load of traversal has a very dynamic nature.
Current research resulted in methods to dynamically balance load as the traversal is evaluated. Unfortunately,
current grid-based GPU computing interfaces are not well suited for this type of computing and load balanc-
ing code can generate excessive overhead. This work presents a novel algorithm to address some of the most
glaring problems. The algorithm uses the new concept of lazy work stealing, which tries to get the most out
of the parallel capabilities of GPUs by greedy work stealing and lazy work evaluation. Also, the algorithm is
designed to augment shared memory usage per block and diminish CPU-GPU context exchange penalties.
1 INTRODUCTION
Collision Detection (CD) is the research area that
studies the problem of intersecting bodies. This prob-
lem arises in several fields, such as graphics and
physics simulations and robot motion. Several ap-
proaches to the problem have been proposed and
they can be classified as either Discrete Collision
Detection (DCD) or Continuous Collision Detection
(CCD).
CCD considers the entire time interval between
frames while evaluating collision and is widely used
in recent works. DCD considers just a moment of
the interval and, thus, can miss collisions. CCD is
more costly than DCD (Provot, 1997), however, un-
like DCD, it cannot miss collisions inside the interval
and, thus, is more precise.
CCD is becoming more affordable by applications
because of the increasing of parallel capabilities of
processors, allied with the rise in popularity of Gen-
eral Purpose Graphics Processing Units (GPGPU)
(Nickolls and Dally, 2010). There are several devel-
opment interfaces for GPGPU architectures available,
but this work uses the definitions of (NVIDIA, 2012).
Bounding Volume Hierarchies (BVHs) are com-
monly used to accelerate CD. BVHs can be classified
according to the type of Bounding Volumes (BVs)
used. A common choice is the OBB-tree, that is,
a binary tree where each node contains an Oriented
Bounding Box (OBB) enclosing ever finer parts of the
model or scene.
Contributions. The contribution of this work is the
presentation of a novel load balancing algorithm for
hierarchy traversal, based on the task stealing load
balancing approach discussed by Cederman and Tsi-
gas (Cederman and Tsigas, 2009). The algorithm’s
performance is evaluated on two systems employ-
ing an NVIDIA GeForce GT520 and an NVIDIA
GeForce GTS450 GPU. It is also compared with the
load balancing scheme used in the gProximity ap-
proach (Lauterbach et al., 2010).
1.1 Related Work
CD is a widely studied field and great overviews can
be found in (Teschner et al., 2004) and (Ericson,
2004). The research on BVH based CCD in recent
years is mainly divided between two paths of opti-
mization ideas: parallelism and culling.
Different algorithms have been proposed to par-
allelize traversal work among threads in CPU, be-
tween CPU and GPU in hybrid systems, and among
threads purely in the GPU. (Kim et al., 2009c) paral-
lelized traversal work among threads in CPU by do-
ing a breath-first serial traversal until a hierarchy level
with enough nodes to feed all threads is found. The
work of (Tang et al., 2010b) distributes the nodes of
430
Silva V., Esperança C. and Guerra Marroquim R..
Lazy Work Stealing for Continuous Hierarchy Traversal on Deformable Bodies.
DOI: 10.5220/0004656904300437
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 430-437
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the Bounding Volume Test Tree (BVTT) front among
CPU threads to achieve better parallelism.
Another approach in (Kim et al., 2009a) explores
GPUs to perform the elementary tests in a hybrid
CPU-GPU environment. Lauterbach et al. (Lauter-
bach et al., 2010) uses one GPU kernel to traverse the
tree and another to balance the workload. In recent
work, (Tang et al., 2011) extended these ideas by pro-
viding an algorithm for stream registration of the data
generated during traversal, and using a deferred front
tracking approach to lower the BVTT front memory
overhead.
Another related area intensely investigated in the
last years is the design of culling methods for BVH-
based CCD. The main motivation is to diminish the
overhead generated by the huge number of false pos-
itives and redundant computations that pure BVH
traversal can generate. The efforts are divided in high-
level and low-level culling algorithms. High-level al-
gorithms are heuristics designed to discard portions
of the hierarchy early while traversing. Several works
can be found in the subject. In (Heo et al., 2010),
surface normals and binormal cones are used to dis-
card parts of the geometry while traversing the hier-
archy, while (Tang et al., 2008) creates the concept of
Continuous Normal Cones by extending the Normal
Cones to CCD.
On the other hand, low-level culling algorithms
focus on discarding redundant and false-positive
primitive tests.(Tang et al., 2010a) uses Bernstein
polynomials to formulate a non-penetration filter
which detects if a feature pair cannot be coplanar on
the entire time interval and thus cannot intersect. In
another work (Tang et al., 2008), a set of all the mean-
inful elementary tests generated by adjacent triangles
is precomputed, obviating the evaluation of their col-
lision on traversal.
The work in (Curtis et al., 2008) diminishes the
number of redundant primitive tests by extending the
triangle representation to carry feature assignment
info.
2 BOUNDING VOLUME
HIERARCHIES
The main idea behind BVHs is to approximate geom-
etry by the coarse Bounding Volumes (BVs) repre-
sentation, for which collision can be evaluated easily.
Oriented Bounding Boxes (OBBs (Gottschalk et al.,
1996)) are reported as a good choice for use in GPUs
because they provide a better cost-benefit in respect
with culling efficiency and computational overhead
(Lauterbach et al., 2010).
The hierarchy traversal is the operation that ac-
tually evaluates collision and generates a potentially
colliding primitive pair list. To finish the collision de-
tection, classic edge-edge and vertex-face elemental
tests, are evaluated for each triangle pair in the poten-
tially colliding primitive pair list. For this, linear mo-
tion of each vertex between frames is assumed. The
cubic equations are described in (Provot, 1997).
To achieve better performance, the prototypes as-
sociated with this work implement two culling meth-
ods. First, the Non-penetration Filter algorithm (Tang
et al., 2010a) is used. It eliminates the need for solv-
ing the cubic equation of a vertex-face pair (p, t) when
point p remains on the same side of triangle t during
all time interval. Similarly, an edge-edge pair can be
culled if they cannot be coplanar during the time in-
terval. Second, the concept of Orphan Sets defined in
(Tang et al., 2008) is used to ignore adjacent triangle
intersections in traversal.
2.1 Front-based Decomposition
The prototypes associated with this work implement
the concept of front-based decomposition (Tang et al.,
2010b). This concept allows the usage of time co-
herence in BVH traversal by saving the front of the
traversal’s Bounding Volume Test Tree (BVTT). This
front can be used as the starting point for the traver-
sal in the next frame, saving computational time and
providing more parallelism. The front can be acquired
while in traversal by saving the pairs of BVH nodes in
which the traversal ends. These pairs are those whose
collision is evaluated as false or leaf pairs. The con-
cepts are shown in Figure 1.
Figure 1: BVH and associated BVTT for an intra-collision
traversal. The marked nodes in the BVTT are the front, i.e.,
the nodes where the collision traversal ended. As shown in
(Tang et al., 2010b).
The front saved from previous frame can be used
as the starting point for the traversal in the current
LazyWorkStealingforContinuousHierarchyTraversalonDeformableBodies
431

frame. However, while the simulation proceeds, the
adition of BVTT front nodes can turn it outdated. Bet-
ter heuristics to detect an outdated front are model de-
pendent and empirical. Rebuilding the front means
traversing the hierarchy again from the root.
3 LOAD BALANCING ON
BOUNDING VOLUME
HIERARCHY TRAVERSAL
The main difficulty that arises when designing CCD
BVH traversal algorithms for GPUs is the fact that
current grid-based GPU computing interfaces are not
well suited for applications where the workload is not
known a priori. BVH traversal falls in this category
since it is not possible to predict the traversal before
evaluating it and the process generates work on-the-
fly, requiring dynamic load balancing.
Four different methods for load balancing on
GPUs are discussed in (Cederman and Tsigas, 2009):
Static Task List, Blocking Dynamic Task Queue,
Lock-free Dynamic Task Queue and Task Stealing.
Static Task List is the simplest load balancing scheme.
Balancing occurs before issuing all work, thus it
is inherently inflexible. The algorithm proposed in
(Lauterbach et al., 2010) tries to address the inflexi-
bility of the Static Task List by redistributing nodes
if the number of unused cores is higher than a prede-
fined threshold.
The Task Stealing algorithm (Arora et al., 1998)
was designed to balance load among processes in a
multiprocessor system. It uses double ended queues
(deques) to fulfill this task. Each process has its own
deque from which it can pop or push threads. This
way, the process can acquire work (pop) or generate
work dynamically (push). These operations are done
on the bottom side of the deque. When a process fin-
ishes its job, it tries to steal from the deques of other
processes. This operation is done on the top side of
the deque, for the sake of parallelism. Figure 2 shows
the concept. (Cederman and Tsigas, 2009) produced
good results when adapting the Task Stealing algo-
rithm (Arora et al., 1998) to balance the load gener-
ated by the parallel quicksort algorithm on GPUs.
Figure 2: Deque scheme of (Arora et al., 1998). As shown
in the paper.
4 LAZY WORK STEALING
In this section the novel Lazy Work Stealing algo-
rithm is presented. It is based on the approach de-
scribed in (Cederman and Tsigas, 2009) for Task
Stealing. The main goal of the algorithm is to be more
flexible than other methods by diminishing the over-
head of load balancing and thus freeing GPU to do the
actual work, i.e. the traversal itself. Some optimiza-
tion ideas guide our novel algorithm.
1. Ideally, a block should be able to acquire work
with a minimal performance hit on other working
blocks.
2. We want to minimize balancing calls and CPU-
GPU context change overhead.
3. Maximum available shared memory per block.
The front update pass (Tang et al., 2010b), can
benefit greatly from using shared memory, since
the method is memory bound.
Since Task Stealing is on-demand in essence, the
problem of performance hits on working blocks is ad-
dressed. Also, the CPU-GPU context change is di-
minished, since the task stealing code must be incor-
porated into the traversal kernel. The problems re-
lated with shared memory are also solved by setting
the number of launched blocks for the traversal kernel
as a number of blocks that can actually run in paral-
lel on the device, and thus promote optimal device
occupancy. This way, we achieve maximum shared
memory per block and avoid resource waste, since all
multiprocessors will be busy. It is important to note
that even if a kernel can be launched with a huge num-
ber of blocks, just a few reside at the same time on the
device, and this information can be queried on all cur-
rent CUDA enabled devices.
Unfortunately not all problems are solved using
this approach. The original Task Stealing approach
(Arora et al., 1998) requires that all blocks with empty
deques keep pooling another block deques in a round
robin fashion, attempting to steal nodes. In this case,
even if the multiprocessor is busy, it may not actually
be doing useful work. Thus, we propose an improved
method by performing modifications to better suit the
stealing part of the algorithm to GPUs:
1. A three-pass approach is used for node manage-
ment since the amount of shared memory per
block can be augmented. In each traversal loop
iteration, each thread pops one node, evaluates it
and all generated work nodes or front nodes are
saved in local thread memory (pass 1). Continu-
ing in the same loop iteration, all nodes generated
in a block are saved in a shared memory stack.
This is achieved by using a prefix-sum (Sengupta
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
432
et al., 2007) approach (pass 2). Ending the itera-
tion, part of the shared stack is pushed to global
memory if the shared stack is nearly full (pass 3).
The algorithm is described in depth in Algorithm
1.
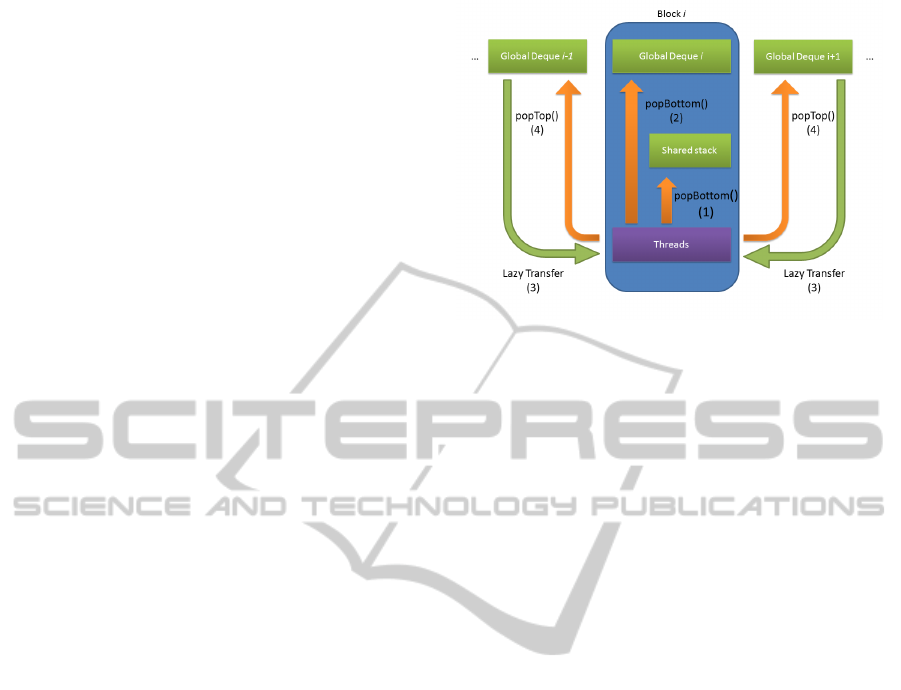
2. In the pop pass (pass 1), a three-level pop ap-
proach is also used. The first pop attempt is on the
shared stack (level 1). If unsuccessful, an attempt
to pop from the block’s deque is done (level 2).
If it fails, work is stolen from the deques of other
blocks (level 3) and the block resumes traversal.
If no work can be stolen, the traversal ends. The
overall scheme is presented in Figure 3. The algo-
rithm is described in depth in Algorithm 2. Level
2 and 3 pop functions are explained in more detail
in Algorithms 3 and 4.
3. The operations in all deques are done in batch
to avoid excessive increments on global memory
deque pointers. Just one thread in a block is re-
sponsible for doing the actual operation on deque
pointers. The other threads just help to push or
pop the affected nodes. In the algorithm listings,
the functions pop, popTop and popBot are only
changing pointers, i.e., they don’t actually trans-
fer the nodes.
4. A lazy approach is used to acquire stolen nodes
(pop level 3). Since a block has a reasonable
number of threads running in parallel, the stealing
part of the algorithm pops all deques at the same
time, each thread changing the top pointer of one
global deque. However, just the nodes from the
first stolen deque are actually transferred to the
block stack at this time. The transfer is done in
little batches to ensure saving shared stack size for
traversal. To achieve this lazy transfer, it is neces-
sary to save the deque indices and sizes of all suc-
cessful pop operations of a task steal, and forbid
deque pointers to be reset when a deque is empty.
It is important to note that these changes aim at
maximizing stolen nodes in a stealing attempt and
maximizing stack size available for future traver-
sal. Specifically, if a block b
i
successfully pops on
the top side of blocks b
j
and b
k
, saving stealing
info (indices and sizes) to p
i j
and p
ik
and j < k,
then nodes from global deque d
k
are transferred
to local stack s
i
only after all deque d
j
nodes are
transfered, processed and s
i
as well as deque d
i
become empty again. The algorithm is described
in depth in Algorithm 4.
In the algorithm listings, the function assign-
Shared() is used to denote one assignment for the en-
tire block, i.e., only one thread of the block actually
alters the variable. Also, when a variable is declared
Figure 3: Lazy work acquisition scheme. First, threads try
to pop from their block’s shared stack (1). If not successful,
they try to pop from its global deque (2). If not success-
ful, enough nodes (if any) are transferred from lazily stolen
nodes (3). If there are no more nodes from lazy steal, all
other block deques are stolen (4).
as volatile, it must bypass incoherent cache memory.
5 EXPERIMENTS
The algorithm was tested in two systems. The first
uses a GeForce GTS 450 card, which has 1 GB
memory, 57.7 GB/s memory bandwidth and 4 SMs
(streaming multiprocessors), each one with 48 CUDA
cores, giving a total of 192 CUDA cores. The sec-
ond uses a GeForce GT 520 card, which has 1 GB
memory, 14.4 GB/s memory bandwidth and 1 SM,
giving a total of 48 CUDA cores. Several commonly
benchmarks were used, namely the BART, Funnel and
Cloth/Ball models. The BART benchmark evaluates
inter-collisions, and we have used four different res-
olutions (64, 256 , 1024 and 4096 triangles). The
Funnel benchmark has 18.5K triangles and tests self-
collision in deformable motion. Cloth/Ball bench-
mark evaluates the same type of collision, but has a
heavier workload with 92K triangles. Linear motion
between frames is assumed for all vertices. Figure 4
shows the benchmark scenes.
Table 1 shows the performance results for each
benchmark. The numbers include time for hierarchy
refit, front update, front-based traversal, load balanc-
ing and triangle pair intersection. The implementation
uses the non-penetration filters (Tang et al., 2010a)
and orphan sets (Tang et al., 2008) culling methods.
Table 2 shows the speedup of the GTS 450 in relation
with the GT520 and demonstrates how the algorithm
scales. The calculation of speedup is just the ratio be-
tween the columns GT 520 and GTS 450 in table 1.
Table 3 shows the average number of processed
LazyWorkStealingforContinuousHierarchyTraversalonDeformableBodies
433

Figure 4: Continuous Collision Detection results using the Lazy Work Stealing algorithm. The collided faces are shown in
green. From left to right, the benchmarks are: BART, funnel, cloth/ball.
Algorithm 1: Novel algorithm traversal and front acquisi-
tion. 1) Node acquisition (popWork). 2) Work compaction
(compactStacks). 3) Push from shared stack to global deque
if necessary (pushWork).
1: function TRAVERSE(gBvtt , gFront)
2: Parameters (global memory):
3: gBvtt BVTT work deques
4: gFront BVTT front deques
5: Block shared memory:
6: sBvtt BVTT work shared data
7: sFront BVTT front shared data
8: Thread local memory variables:
9: tBvtt[3] generated work nodes
10: tFront generated front node
11: t Thread index. Used in all algorithms
12: b Block index. Used in all algorithms
13: loop
14: if NOT(POPWORK(gBvtt , sBvtt , tBvtt))
then
15: PUSHREMAININGFRONT
16: return TRAVERSAL
END
17: if NOT(tBvtt.empty) then
18: EVALCOLLISION(tBvtt , tFront)
19: COMPACT(sBvtt,tBvtt,sFront,tFront)
20: if NOT(PUSHWORK(gBvtt , sBvtt) then
21: return OVERFLOW
22: if NOT(PUSHWORK(gFront , sFront)
then
23: return OVERFLOW
24: end loop
25: end function
front nodes per frame. This information depicts well
the resources necessary to compute CCD for high
density models and the differences in timings among
benchmarks.
Algorithm 2: Novel lazy steal popWork device function.
Each thread tries to pop a node in a 3 level approach until
successful or all deques are inactive.
1: function POPWORK(gBvtt , sBvtt , tBvtt)
2: Block shared memory:
3: pFlag[3] Pop results for each level pass
4: pStr[NDEQUES] Saved pop starts
5: pSz[NDEQUES] Saved pop sizes
6: v Current work stealing victim
7: nDeques Number of deques
8: if t = f irstT hread then Level 1
9: stack ← sBvtt.stack
10: pFlag[L1] ← stack.POP(pStr[b],pSz[b])
11: pFlag[L3] ← bPopFlag[L1]
12: SYNC
13: if pFlag[L1] then
14: if t < pSizes[b] then
15: tBvtt ← sBvtt.stack[pStr[b] + t]
16: else
17: LEVEL2POP(gBvtt,pFlag,pStr,pSz,v)
18: SYNC
19: if NOT (pFlag[L2]) then Steal
20: LEVEL3POP(gBvtt,pFlag,pStr,pSz,v)
21: SYNC
22: if pFlag[L3] AND t < pSz[b] then
23: tBvtt ← gBvtt.deque[v][pStr[b] +t]
24: return pFlag[L3]
25: end function
6 COMPARISON AND ANALYSIS
The Lazy Work Stealing algorithm is compared with
gProximity (Lauterbach et al., 2010) in an imple-
mentation done by the author of this paper. Table
4 shows the comparision of performance timings of
the Lazy Work Stealing algorithm and gProximity for
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
434

Algorithm 3: Level 2 pop function. Pop from the deque
owned by the block.
1: function LEVEL2POP(gBvtt,pFlag,pStr,pSz,v)
2: Global memory:
3: gBvtt.active[] is volatile
4: if t = f irstT hread then
5: d ← gBvtt.deque[b]
6: pFlag[L2] ← d.POPBOT(pStr[b],pSz[b])
7: if pFlag[L2] then
8: v ← b
9: else
10: gBvtt.active[b] ← INVALID
11: pStr[b] ← ∞
12: v ← ∞
13: pFlag[L3] ← pFlag[L2]
14: end function
Algorithm 4: Level 3 pop function. Lazy transfer if there
are available nodes from last steal. Otherwise steal from
all active blocks. Signs for traversal end if all blocks are
inactive.
1: function LEVEL3POP(gBvtt , pFlag , pStr , pSz , v)
2: Global memory:
3: gBvtt.active[] is volatile
4: Block shared memory:
5: activeDequesFlag Mark if there are active
blocks.
6: if t < nDeques then
7: if pStr[t] 6= INVALID then
8: v ← ATOMICMIN(v , t)
9: pFlag[L3] ← T RUE
10: SYNC
11: if t = v then
12: pStr[b] ← pStr[t]
13: pSz[b] ← pSz[t]
14: pStr[t] ← INVALID
15: while NOT (pFlag[L3]) do No transfers
16: SYNC
17: ASSIGNSHARED(activeDequesFlag,FALSE)
18: SYNC
19: if t < nDeques then
20: if gBvtt.active[t] = T RUE then
21: activeDequesFlag ← T RUE
22: d ← gBvtt.deque[t]
23: if d.POPTOP(pStr[t] , pSz[t]) then
24: gBvtt.active[b] ← T RUE
25: v ← ATOMICMIN(v , t)
26: pFlag[L3] ← T RUE
27: SYNC
28: if activeDequesFlag = FALSE then
29: break
30: if t = v then
31: pStr[b] ← pStr[t]
32: pSz[b] ← pSz[t]
33: pStr[t] ← INVALID
34: SYNC
35: end function
Table 1: Lazy Work Stealing performance results. Times in
ms.
Model Triangles GTS 450 GT 520
BART64 64 2.6 1.6
BART256 256 3.4 3.5
BART1024 1024 8.4 19.7
BART4096 4096 51.3 169.9
Funnel 18.5K 17.4 48.2
Cloth/Ball 92K 77.3 225.7
Table 2: Lazy Work Stealing speedup on GTS 450 in rela-
tion with the GT 520. Calculation is the ratio of GT 520 and
GTS 450 columns of Table 1.
Model Triangles Speedup
BART64 64 0.61
BART256 256 1.03
BART1024 1024 2.34
BART4096 4096 3.31
Funnel 18.5K 2.77
Cloth/Ball 92K 2.92
the GT520 systems for all benchmarks. The numbers
include time for hierarchy refit, front update, front-
based traversal, load balancing and triangle pair inter-
section. Table 5 shows the same comparison for the
GTS450 system. Finally, 6 compares the speedup of
the algorithms. The speedup in this case is the ra-
tio of the GTS 450 timings and the GT 520 timings
for each benchmark. This demonstrates how the algo-
rithms scale.
It is important to note that both algorithms have
similar code for refit and triangle intersection. The
only noticeable changes are in the load balancing,
front update and traversal code. Also, both implemen-
tations use the same culling methods.
Based on the collected data, the algorithms seem
to have similar performance for the analyzed bench-
marks. Which algorithm performs better depends on
the benchmark and system. Both algorithms seem to
scale well. The GTS 450 system has 4 times more
resources than the GT520 system and both systems
have a near 3 times speedup, with gProximity hav-
ing a peak of 3.47 speedup for the Cloth/Ball bench-
mark. The BART64 and BART256 examples showed
poor scalability because of the lack of work available.
Also it was observed that most of the time for BVH
management is spent with the front update. This is
mainly due to the number of nodes that the front may
have. For instance, the peak in the number of pro-
cessed front nodes in a frame pass 10 million for the
Cloth/Ball benchmark.
LazyWorkStealingforContinuousHierarchyTraversalonDeformableBodies
435

Table 3: Lazy Work Stealing average number of processed
front nodes per frame. Numbers in K nodes per frame.
Model Front nodes
BART64 0.807
BART256 9.159
BART1024 127.394
BART4096 2,156.260
Funnel 493.391
Cloth/Ball 2,482.040
Table 4: Comparison of the Lazy Work Stealing (LWS) al-
gorithm and gProximity timings on GT 520. Times in ms.
Model Tris LWS gProximity
BART64 64 1.6 1.6
BART256 256 3.5 3.1
BART1024 1024 19.7 14.7
BART4096 4096 169.9 173.4
Funnel 18.5K 48.2 49.0
Cloth/Ball 92K 225.7 238.3
6.1 Limitations
The proposed algorithm has some limitations. First,
it is highly memory bound. Thus, the performance
is very dependent of the device memory bandwidth,
mainly because of the front update pass. Second, the
best size of the shared stacks depends on the model.
If the model has a lighter workload, setting a higher
stack size can forbid nodes to get to the global de-
ques and in consequence forbid blocks to steal work.
Analogously, if the model has a heavier workload, set-
ting a lesser stack size can forbid blocks to benefit
from the performance of the shared memory latency.
Finally, the requirements of global memory size are
higher when compared with methods that use deques
that can be reset.
7 CONCLUSIONS AND FUTURE
WORK
In this work, the Lazy Work Stealing algorithm for
load balance of continuous collision detection on
GPUs is presented. The algorithm relies on heavy
usage of device shared memory to diminish the over-
head of node management on traversal. Also, it tries
to diminish work acquisition overhead using a greedy
steal, lazy transfer approach.
The immediate plans for future work include the
implementation of more culling methods, such as
Representative Triangles (Curtis et al., 2008) and
Continuous Normal Cones (Tang et al., 2008), to
Table 5: Comparison of the Lazy Work Stealing (LWS) al-
gorithm and gProximity timings on GTS 450. Times in ms.
Model Tris LWS gProximity
BART64 64 2.6 3.1
BART256 256 3.4 3.6
BART1024 1024 8.4 7.5
BART4096 4096 51.3 47.6
Funnel 18.5K 17.4 16.3
Cloth/Ball 92K 77.3 68.6
Table 6: Comparison of the Lazy Work Stealing algorithm
and gProximity speedup on GTS 450 in relation with the
GT 520.
Model Tris LWS gProximity
BART64 64 0.61 0.51
BART256 256 1.03 1.16
BART1024 1024 2.34 1.96
BART4096 4096 3.31 3.64
Funnel 18.5K 2.77 3.00
Cloth/Ball 92K 2.92 3.47
achieve better performance. Another path of develop-
ment is to test the algorithm with more modern GPUs,
such as NVidia’s Kepler compute architecture.
In addition, a deeper comparison of Lazy Work
Stealing with other load balancing approaches could
be an interesting topic as well as the usage of this load
balancing algorithm on other problems where work
loads depend on the geometry, such as Ray Tracing.
ACKNOWLEDGEMENTS
The authors would like to thank the GAMMA re-
search group at the University of North Carolina
at Chapel Hill and Jonas Lext, Ulf Assarsson, and
Tomas M
¨
oller of the Chalmers University of Technol-
ogy for making available the benchmarks used in this
work.
REFERENCES
Arora, N. S., Blumofe, R. D., and Plaxton, C. G. (1998).
Thread scheduling for multiprogrammed multiproces-
sors. In Proceedings of the tenth annual ACM sympo-
sium on Parallel algorithms and architectures, SPAA
’98, pages 119–129, New York, NY, USA. ACM.
Cederman, D. and Tsigas, P. (2009). On sorting and load
balancing on GPUs. SIGARCH Comput. Archit. News,
36(5):11–18.
Curtis, S., Tamstorf, R., and Manocha, D. (2008). Fast
collision detection for deformable models using
representative-triangles. In Haines, E. and McGuire,
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
436

M., editors, Proceedings of the 2008 Symposium on
Interactive 3D Graphics, SI3D 2008, February 15-17,
2008, Redwood City, CA, USA, pages 61–69. ACM.
Ericson, C. (2004). Real-Time Collision Detection (The
Morgan Kaufmann Series in Interactive 3-D Technol-
ogy) (The Morgan Kaufmann Series in Interactive 3D
Technology). Morgan Kaufmann Publishers Inc., San
Francisco, CA, USA.
Gottschalk, S., Lin, M. C., and Manocha, D. (1996). Obb-
tree: a hierarchical structure for rapid interference
detection. In Proceedings of the 23rd annual con-
ference on Computer graphics and interactive tech-
niques, SIGGRAPH ’96, pages 171–180, New York,
NY, USA. ACM.
Group, K. (2012). The opencl specification version: 1.2
document revision: 19.
Heo, J.-P., Seong, J.-K., Kim, D., Otaduy, M. A.,
Hong, J.-M., Tang, M., and Yoon, S.-E. (2010).
Fastcd: Fracturing-aware stable collision detection.
In Popovic, Z. and Otaduy, M. A., editors, Proceed-
ings of the 2010 Eurographics/ACM SIGGRAPH Sym-
posium on Computer Animation, SCA 2010, Madrid,
Spain, 2010, pages 149–158. Eurographics Associa-
tion.
Kim, D., Heo, J.-P., Huh, J., Kim, J., and Yoon, S.-E.
(2009a). HPCCD: Hybrid parallel continuous colli-
sion detection using cpus and gpus. Computer Graph-
ics Forum (Pacific Graphics).
Kim, D., Heo, J.-P., Huh, J., Kim, J., and Yoon, S.-E.
(2009b). Hpccd: Hybrid parallel continuous collision
detection using cpus and gpus. Computer Graphics
Forum (Pacific Graphics).
Kim, D., Heo, J.-P., and Yoon, S.-e. (2009c). Pccd: par-
allel continuous collision detection. In SIGGRAPH
’09: Posters, SIGGRAPH ’09, pages 50:1–50:1, New
York, NY, USA. ACM.
Lauterbach, C., Mo, Q., and Manocha, D. (2010). gprox-
imity: Hierarchical gpu-based operations for collision
and distance queries. In Proceedings of Eurographics
2010.
Ni, T. (2009). Directcompute.
Nickolls, J. and Dally, W. J. (2010). The gpu computing
era. IEEE Micro, 30(2):56–69.
NVIDIA (2012). NVIDIA CUDA Programming Guide.
Provot, X. (1997). Collision and self-collision handling in
cloth model dedicated to design garments. In Graph-
ics Interface 97, pages 177–179.
Sengupta, S., Harris, M., Zhang, Y., and Owens,
J. D. (2007). Scan primitives for gpu comput-
ing. In Proceedings of the 22nd ACM SIG-
GRAPH/EUROGRAPHICS symposium on Graphics
hardware, GH ’07, pages 97–106, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Tang, M., Curtis, S., Yoon, S.-E., and Manocha, D. (2008).
Interactive continuous collision detection between de-
formable models using connectivity-based culling. In
SPM ’08: Proceedings of the 2008 ACM symposium
on Solid and physical modeling, pages 25–36, New
York, NY, USA. ACM.
Tang, M., Manocha, D., Lin, J., and Tong, R. (2011).
Collision-streams: Fast GPU-based collision detec-
tion for deformable models. In I3D ’11: Proceedings
of the 2011 ACM SIGGRAPH symposium on Interac-
tive 3D Graphics and Games, pages 63–70.
Tang, M., Manocha, D., and Tong, R. (2010a). Fast
continuous collision detection using deforming non-
penetration filters. In Proceedings of the 2010 ACM
SIGGRAPH symposium on Interactive 3D Graphics
and Games, I3D ’10, pages 7–13, New York, NY,
USA. ACM.
Tang, M., Manocha, D., and Tong, R. (2010b). Mccd:
Multi-core collision detection between deformable
models using front-based decomposition. Graphical
Models, 72(2):7–23.
Teschner, M., Kimmerle, S., Zachmann, G., Heidelberger,
B., Raghupathi, L., Fuhrmann, A., Cani, M.-P., Faure,
F., Magnetat-Thalmann, N., and Strasser, W. (2004).
Collision detection for deformable objects.
LazyWorkStealingforContinuousHierarchyTraversalonDeformableBodies
437
