Tetrachromatic Metamerism
A Discrete, Mathematical Characterization
Alfredo Restrepo Palacios
Laboratorio de Se
˜
nales, Dept. Ing. El
´
ectrica y Electr
´
onica, Universidad de los Andes,
Carrera 1 No. 18A-70; of. ML-427, Bogot
´
a 111711, Colombia
Keywords:
Metamerism, Tetrachromacy.
Abstract:
Two light beams that are seen as of having the same colour but that have different spectra are said to be
metameric. The colour of a light beam is based on the reading of severel photodetectors with different spectral
responses and metamerism results when a set of photodetectors is unable to resolve two spectra. The spectra
are then said to be metameric. We are interested in exploring the concept of metamerism in the tetrachromatic
case. Applications are in computer vision, computational photography and satellite imaginery, for example.
1 INTRODUCTION
Two light spectra are said to be metameric when the
corresponding lights look of the same colour. For ex-
ample, a spectral (i.e. of energy at a unique wave-
length) yellow light beam and an appropriate com-
bination of spectral beam lights, green and red. We
stress the point that it is pairs of spectra, and not pairs
of colors, that are metameric.
We explore the concept of metamerism in the
tetrachromatic case, mainly from a mathematical
viewpoint. Applications are in computer vision, non-
human biological vision, computational photography
and satellite imaginery, for example.
Given four photodectectors with spectral sensitiv-
ity curves w(λ), x(λ), y(λ), and z(λ), and the spec-
trum s(λ) of a light beam that falls on the surface
of each, the corresponding responses are given by
c
w
=
R
s(λ)w(λ), c
x
=
R
s(λ)x(λ), c
y
=
R
s(λ)y(λ)
and c
z
=
R
s(λ)z(λ). The integrals measure the area
below the spectrum curve (i.e. the radiant energy)
as ”seen through” each of the sensitivity curves. In
a sense, the sensitivity curves aperture sample the
spectrum. In such a tetrachromatic a vision system
1
,
two spectra giving rise to the same responses c
w
, c
x
,
c
y
and c
z
will be undistinguishble by the photode-
tectors and will be said to be metameric. The point
c = [c
w
,c
x
,c
y
,c
z
] ∈ R
4
will be called a colour point;
1
In our case, we are old-world, fruguivore, trichromatic
primates and most of us have exactly three types of pho-
topigment in the main receptor layer of our retinae, but
many animals are tetrachromatic.
here, R denotes the set of the real numbers.
Thus, in going from s(λ) to c = [c
w
,c
x
,c
y
,c
z
], you
take four aperture samples of s and metamerism re-
sults when the photodetectors are unable to resolve
two spectra. This is unavoidable if you consider that
a set of four photoreceptors linearly
2
maps the graph
curve of each spectrum function s : [λ
min
,λ
max
] →
[0,∞) into a point on the ”16-tant
3
” R
4+
that we de-
note also as [+, +, +, +]:= {[t
1
,t
2
,t
3
,t
4
] : t
i
≥ 0} of R
4
.
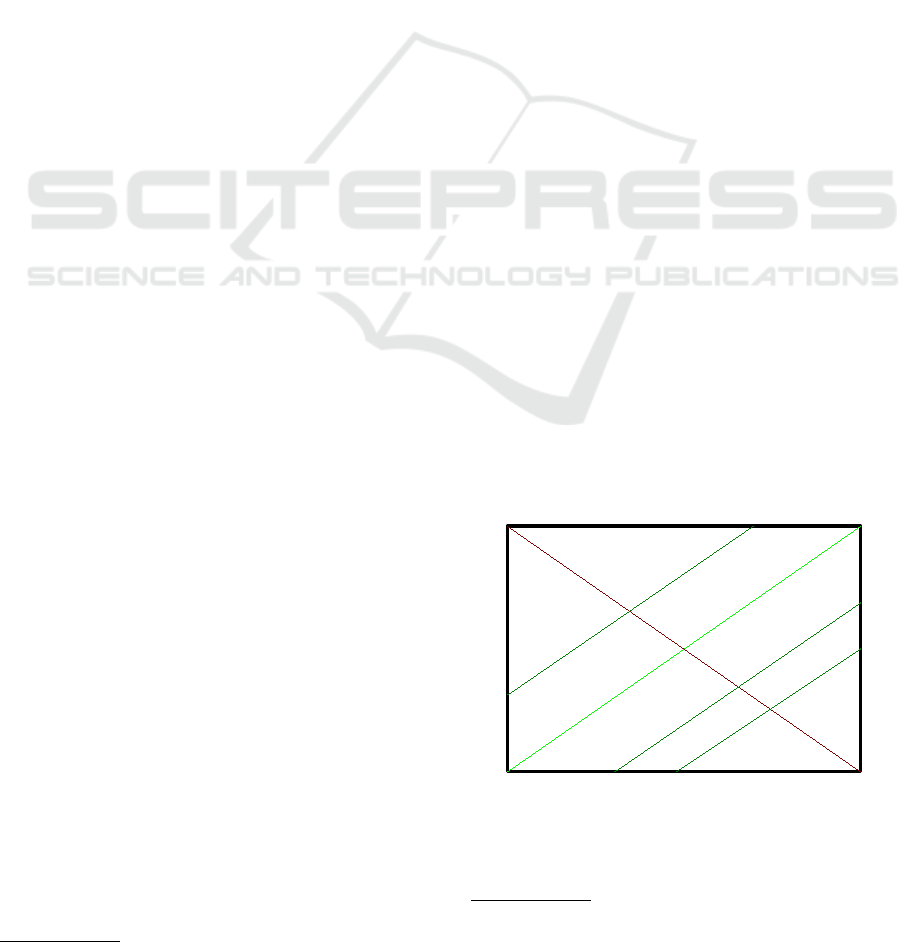
Figure 1: The rectangle is meant to be the domain space of
a linear transformation; the point at the center is the origin
of the space. The light green line is meant to be the kernel
of the transformation, the green lines are cosets and the red
line is the orthogonal complement of the kernel.
2
The fact that the irradiance of the light beam is non-
linearly contracted to a bounded luminance is being over-
looked here; nevertheless, regarding the hue, things are
pretty much linear..
3
Analogously to the cuadrants of the plane and the oc-
tants of 3-space.
40
Restrepo Palacios A..
Tetrachromatic Metamerism - A Discrete, Mathematical Characterization.
DOI: 10.5220/0004660200400047
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 40-47
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

In order to use the machinery of linear spaces
with the transformation s 7→ c, we must allow both
spectra and color points to take on negative values as
well. The resulting sets of spectra R
[λ
min
,λ
max
]
and of
colours R
4
are now linear spaces and will be called
sets of virtual spectra and of virtual colours, respec-
tively. When a virtual spectrum is nonnegative we
say that is is realizable and, likewise, when the com-
ponents of a colour are nonnegative, we say that it is
a realizable colour.
The kernel of the transformation R
[λ
min
,λ
max
]
→
R
4
that maps s 7→ c, is the set of spectra that are
mapped to the colour point [0, 0, 0, 0], called here
black. The spectra in each corresponding coset of
spectra are mapped to the same (colour) point on R
4
;
this is the main idea behind a mathematization of the
phenomenon of metamerism. See Figure 1.
In our digital, technical world, magnitudes are
made discrete; a camera aperture-samples the spec-
trum of the light at each of many small spatial re-
gions or pixels. In addition to this, we assume that
such sampling is done over an already sampled spec-
trum, sampled at a much more finer scale, e.g. ev-
ery 10 nm, or so. Thus, the interval set of wave-
lengths [λ
min
,λ
max
] ⊂ R is converted to a finite se-
quence {λ
1
= λ
min
, λ
2
, λ
3
, ... λ
N
= λ
max
} of wave-
lengths, and the transformation from spectra to colors
is now of the form R
N
→ R
4
, considerably simpler
and yet a good approximate model. Integrals become
dot products, i.e. c
w
= w.s =
∑
w
i
s
i
, c
x
= x.s =
∑
x
i
s
i
,
c
y
= y.s =
∑
y
i
s
i
and c
z
= z.s =
∑
z
i
s
i
.
Most mammals are dichromatic
4
and it has been
argued that the L photopigment evolved in old-world
monkeys as it resulted advantageous in the appraisal
of the ripeness of fruits when seen from the distance;
or, since male dichromacy is common in such pri-
mates, that it evolved providing females with health
cues regarding potential mates. In biological vi-
sion, tetrachromacy is found in fish, birds, reptiles
and in many invertebrates; the mantis shrimp is 12-
chromatic and sees in the range from 300 nm to 700
nm. In satellite imaginery, the bands may be many but
you may restrict to R, G, B plus either NIR or UV. In
both cases, the bands include some amount of overlap
but are mostly disjoint; unlike the case of a recently
developed detector for photography that, in addition
to the usual R, G and B pixels of a Bayer, array sen-
sor, it includes unfiltered (other than by the glass of
the lens of the camera and the package of the sensor)
”panchromatic” pixels.
Spectral lights are perceived as more saturated
4
Most mammals have cones S (short wavelengths) and
M (medium wavelengths) but no cone L (large wave-
lengths). See (Jevbratt, 2013).
than more wide-band lights; thus, the spectral yellow
might appear a bit more saturated, than the yellow that
results from the mixture of green and red. In what
we call hue metamerism, luminance differences of the
light beams can be considered immaterial, as well as
the saturation, up to a degree. Two colors may have
the same hue but different luminance and different
chromatic saturation; correspondingly, a relaxed type
of metamerism may be also exploited in computer vi-
sion systems; differences in luminance may be due to
differences in illumination intensity and differences in
saturation may be due to atmospheric conditions but
not to different spectral reflectances of surfaces. In
this line, it is useful to consider a hypercube of pho-
todetector responses and identify sets of constant hue
or chromatic triangles, in it (Restrepo, 2013b), (Re-
strepo, 2013a).
Figure 2: Satellite RGB image and processed NIR-RGB im-
age. From (Restrepo, 2013b).
TetrachromaticMetamerism-ADiscrete,MathematicalCharacterization
41

2 TETRACHROMATIC
METAMERISM
Let w, x, y and z be four linearly independent, N-
vectors of samples of the spectral responses, at a set
of wavelengths λ
1
,...λ
N
, of four photodetectors; also,
let the (corresponding samples of the) light spectrum
be given by s. Denote the ”colour” response of the
photodetector set by c = [c
w
,c
x
,c
y
,c
z
]. Assume then
that the response to a light beam falling on four such,
nearly placed, photodetectors is given by
c
T
=
w
x
y
z
s
T
=: Ms
T
or
c
w
c
x
c
y
c
z
=
w
1
... w
N
x
1
... x
N
y
1
... y
N
z
1
... z
N
s
1
.
..
s
N
This provides a linear transformation R
N
→ R
4
,
s 7→ r, that reduces the dimensionality from N to 4. M
has full rank and its entries are nonnegative and, typi-
cally, positive. Thus, for a nonnegative s, c is nonneg-
ative: c ∈ R
4+
. The kernel K of this transformation
is given by the set of vectors k for which
Mk =
w
x
y
z
k =
0
0
0
0
Thus, K, the set of the metameric blacks, is the
space of vectors orthogonal to (each element of) the
subspace L := span{w,x,y,z} = {aM : a ∈ R
4
},
which is isomorphic to R
4
. Also, any two spectra
1
s and
2
s such that
1
s −
2
s ∈ L
⊥
= K, produce
the same colour response c = [c
w
,c
x
,c
y
,c
z
]. L has
dimension 4 and L
⊥
has dimension N − 4; also,
MM
T
: R
4
→ R
4
is invertible. K contains ”spec-
tra” (we might call them virtual spectra) that are
neither nonnegative nor nonpositive
5
. The cosets
s + K := {s + k : s ∈ R
N
,k ∈ K} provide a partition
of R
N
. In a decomposition s = f + k, f ∈ L, k ∈ K,
which is unique, f is called a fundamental metamer
and k is called a metameric black. The spectra in the
coset f + K are said to be metameric and are mapped
by M to the same colour point c ∈ R
4
; only the
nonnegative spectra in such coset are realizable, the
remaining are merely virtual.
5
The spectra in R
N
that are nonnegative are those in the
wedge or ”2
N
-tant” [+, +, ... +]:= R
N+
2.1 A Basis for K
Calling the colour point [0, 0, 0, 0] black, then K
is the set of spectra that ”evoke” the colour black;
call them metameric blacks. Since the components
of M are nonnegative, the only nonnegative spec-
trum that is a metameric black is the 0 spectrum; all
other metameric black spectra include both positive
and negative components.
Cohen’s method (Cohen and Kappauf, 1982),
based on CIE data, consists of finding f as f =
[M
T
(MM
T
)
−1
M]s and then writting k = s − f.
We derive a basis for K of narrow-band spectra in
a 4-step process where 4 triangular, sparse matrices of
row vectors of local support are derived. In the first
matrix
1
A you have a basis for the orthogonal comple-
ment of span{w}, in the second one
2
A, a basis for the
orthogonal complement of span{w, x}, then, in
3
A, a
basis for span{w,x,y}
⊥
and finally, in
4
A, a basis for
span{w,x,y,z}
⊥
. We assume that the components of
w, x, y and z, are positive so that the matrix
1
A below
is computable and also that each of the matrices
2
A,
3
A and
4
A, as defined below, are computable.
Let
1
A be the N × (N − 1) matrix with i
th
row of
the form [0, ..., 0, 1, −w
i
/w
i+1
,0,...,0]; thus,
1
M has a
diagonal of 1’s. Clearly, each row of
1
A is orthogonal
to w and, since linearly independent, they provide a
basis for span{w}
⊥
.
Let each row of
2
A result from linearly combining
each pair of consecutive rows of from
1
A. In this way,
each row is still orthogonal span{w}
⊥
and, by using
appropriate weights in the combination, you can make
it also orthogonal to span{x}
⊥
. In fact, let the i
th
row
of the N × (N − 2) matrix
2
A be given by
[0,...,0,1,m
i,i+1
+ β
i
m
i+1,i+1
,β
i
m
i+1,1+2
,0,...,0]
where the m’s are the components of
1
A, and
β
i
= −
x
i
+m
i,i+1
x
i+1
m
i+1,i+1
x
i+1
+m
i+1,i+2
x
i+2
;
again, the diagonal of
2
A is a diagonal of 1’s. Like-
wise, by making sure a certain linear combination of
each two consecutive rows in
2
A is orthogonal to y,
you get the N × (N − 3)-matrix
3
A with i
th
row of the
form
[0,...,0,1,m
i,i+1
+ βm
i+1,i+1
,m
i,i+2
+βm
i+1,i+2
,βm
i+1,i+3
,0,...,0]
where the m’s are now the components of
2
A and
β
i
= −
y
i
+y
i+1
m
i,i+1
+y
i+2
m
i,i+2
y
i+1
m
i+1,i+1
+y
i+2
m
i+1,i+2
+y
i+3
m
i+1,i+3
.
The diagonal of
3
A is a diagonal of ones. Finally, a
linear combination of each two consecutive rows in
3
A that is orthogonal to z, provides the N × (N − 4)-
matrix
4
A with i
th
row
[0,...,0,1,m
i,i+1
+ βm
i+1,i+1
,m
i,i+2
+βm
i+1,i+2
,m
i,i+3
+ βm
i+1,i+3
,βm
i+1,1+4
,0,
...,0],
where the m’s are now the components of M
3
and
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
42

β
i
= −
z
i
+z
i+1
m
i,i+1
+z
i+2
m
i,i+2
+z
i+3
m
i,i+3
z
i+1
m
i+1,i+1
+z
i+2
m
i+1,i+2
+z
i+3
m
i+1,i+3
+z
i+4
m
i+1,i+4
.
See Fig. 6. Let the rows of the N × (N − 4)-matrix
B :=
4
A denote this resulting base for the kernel K of
M.
Note that the rows in each of these matrices
are linearly independent due to their localized
support. The rows in
1
A have support of length
2, those in
2
A have support of length 3, those
in
3
A have support of length 4 and those in the
basis B of L
⊥
= K have support of length 5. The
existence of β in each case is not so surprising due
to this localization; that is, for example, it is not
too difficult to find constants α
1
and β
1
so that
(α[1,−w
1
/w
2
,0] + β[0,1,−w
2
/w
3
]).[x
1
,x
2
,x
3
] =
[α,−αw
1
/w
2
+ β, −βw
2
/w
3
].[x
1
,x
2
,x
3
] = αx
1
+
(−αw
1
/w
2
+ β)x
2
− (βw
2
/w
3
)x
3
= 0; letting α = 1,
you only need x
1
− w
1
x
2
/w
2
+ β(x
2
− w
2
x
3
/w
3
) = 0,
i. e., x
2
6=
w
2
w
3
x
3
or
x
2
x
3
6=
w
2
w
3
. In fact, when
computing
2
A, each β
i
can be also expressed as
β
i
= −
x
i
−
w
i
w
i+1
x
i+1
x
i+1
−
w
i+1
w
i+2
x
i+2
. Similar formulas of β can be
derived for the remaining cases of
3
A and
4
A
The addition of a scaled element of the so-
obtained basis for K is the addition of a metameric
black that alters the spectrum in a very narrow re-
gion of it producing a new metamer. Large peaks in a
base element of K may indicate indicate insensitivity
to certain wavelengths.
2.2 Sets of Metameric Spectra
The set of spectra R
N
is partitioned into cosets of
the form K + s, s ∈ R
N
. To each colour point c =
[w, x, y,z]
T
in the hypercube, there corresponds the
coset S
c
of dimension N-4, of spectra (not necessarily
realizable as physical spectra) that are mapped by the
matrix
M =
w
x
y
z
to such colour point. To find S
c
, you find a spectrum
vector s for which Ms = c and then write S
c
= K + s.
To find one such s, choose a 4x4 matrix N given by
four columns of M, say the i
th
, j
th
,k
th
,l
th
columns:
N =
w
i
w
j
w
k
w
l
x
i
x
j
x
k
x
l
y
i
y
j
y
k
y
l
z
i
z
j
z
k
z
l
We assume that N is invertible; in fact we choose one
such matrix N having highest absolute determinant so
that the computation of its inverse is more accurate.
Regarding the possible values of the absolute value of
the determinant, there are
76
4
= 1.282.975 choices of
i, j,k, l to consider. Once one such matrix is chosen,
put t = N
−1
c and
s = [0, ...t
i
,0...t
j
,0,...t
k
,0,...t
l
,0,...]
T
s is not necessarily in L, i.e. it is not necessarily a
fundamental metamer; also, t may have negative com-
ponents; in such case, a spectrum s that is nonzero
only at positions i, j, k,l and produces colour c, is not
physically realizable. Only the nonnegative spectral
photoreceptor vectors in K + s are of realizable. It is
possible that a realizable colour not be the image of a
realizable spectrum.
If you are designing a tetrachromatic imaging
system and do not want spectra
1
s and
2
s to be
metameric, at least one of the pairs w.
1
s and w.
2
s, or
x.
1
s and x.
2
s, or y.
1
s and y.
2
s, or z.
1
s and z.
2
s should
be different, in particular,
1
s −
2
s should be in L and
must not be in K; i.e.
1
s −
2
s ∈ L − K.
3 A CASE EXAMPLE:
RGB+PANCHROMATIC
Besides satellites, a source of tetrachromatic images
is computational photography. TrueSense Imaging
inc. markets a digital image sensor that, in addition
to R, G, and B pixels of a Bayer pattern, it includes
as well panchromatic pixels
6
in a pattern as shown in
Fig. 3. The proportions are 1/4 of green pixels, 1/8 of
red pixels, 1/8 of blue pixels and 1/2 panchromatic
pixels. Even though the photosensitive transducers
respond well into the UV, the microlens blocks wave-
lengths below 350 nm. The sensor responds in the
infrared but the response is negligible above 1050 nm.
The pattern of the color filter array is
Figure 3: Pattern in the array of the sensor Truesense Imag-
ing KAI-01150: P B P G; B P G P; P G P R; G P R P.
6
Pixels that are covered by the microlens but that other-
wise do not receive filtered light.
TetrachromaticMetamerism-ADiscrete,MathematicalCharacterization
43
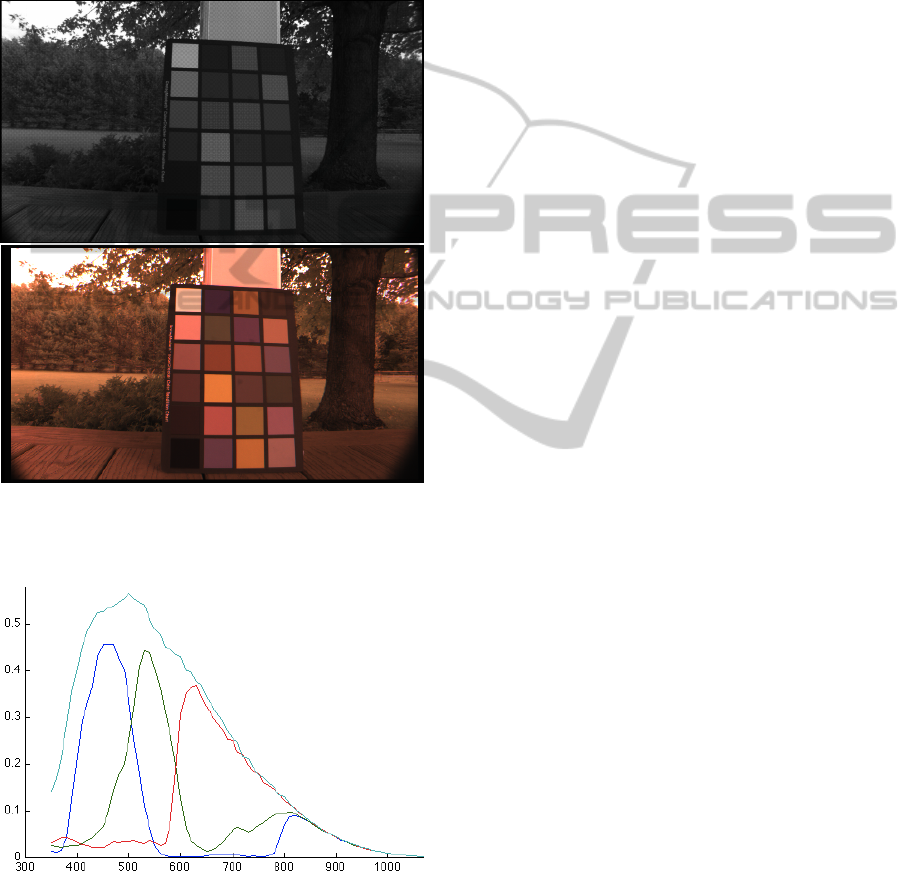
For our purposes, we do not need interpolate the
data in the pattern array that give rise to the image
shown at the top in Figure 4; instead, we downsample
each 4 × 4 pixel block to a tetrachromatic pixel, by
averaging the pixels in each band in the block. Thus,
even though the original image is 1152 × 2044, the
image we work with is only 287 × 510 pixels. Also,
the bands we use are w = P, x = R, y = G and z = B.
Figure 4: Outdoors, 16-bit, RGBP image of a Macbeth
chart; courtesy of Amy Enge. Below, RGB visualization
without corrections.
Figure 5: Quantum efficiencies corresponding to Truesense
sensors P, R, G and B.
The data provided by TrueSense of the quantum
efficiency of each sensor type, at each 10 nm from
350 to 1100 nm, provides 76 data per band. The basis
elements in are shown in Figures 6, at the bottom.
The submatrix with largest determinant is given by
N =
p
5
p
13
p
20
p
29
r
5
r
13
r
20
r
29
g
5
g
13
g
20
g
29
b
5
b
13
b
20
b
29
=
0.3544 0.5390 0.5110 0.3769
0.0378 0.0337 0.0354 0.3688
0.0261 0.1453 0.4382 0.0262
0.1233 0.4566 0.0628 0.0013
and has determinant 0.0136 and inverse given by
N
−1
=
−4.8879 −5.0124 −4.1153 5.1435
1.3590 1.0476 3.4252 −1.4138
−0.3459 2.2207 −0.9022 0.1873
3.1216 0.2047 0.1949 −0.4158
For example, corresponding to colour c =
[0.25,0.25,0.25,0.75]
T
you get
t = [0.3538, 0.3976, 0.3837, 0.5685]
T
and
s = [0...0.3538,0...0.3976,0...0.3837,0...0.5685,0...],
with nonzero values at coordinates 5, 13, 20 and 29.
3.1 Program Code
In the MATLAB code below, vectors R, G, B, P are
the quantum efficiencies. The base for the orthogonal
complement is in AL4. Note: here, the matrix M used
is R = [r; g; b; p]
T
AL1= zeros(76,75);
for ii=1:75
AL1(ii,ii)= 1;
AL1(ii,ii+1)= -R(ii)/R(ii+1);
end
figure; plot(L,AL1)
AL2= zeros(76,74);
for ii=1:74
AL2(ii,ii)= 1;
BETA= -(G(ii) + G(ii+1)*AL1(ii,ii+1)/...
AL1(ii,ii))/(AL1(ii+1,ii+1)*G(ii+1)+ ...
AL1(ii+1,ii+2)*G(ii+2));
AL2(ii,ii+1)= AL1(ii,ii+1)/AL1(ii,ii)+ ...
BETA*AL1(ii+1,ii+1);
AL2(ii,ii+2)= BETA*AL1(ii+1,ii+2);
end
figure; plot(L,AL2)
AL3= zeros(76,73);
for ii=1:73
AL3(ii,ii)= 1;
BETA= -(B(ii) + B(ii+1)*AL2(ii,ii+1)/...
AL2(ii,ii) + B(ii+2)*AL2(ii,ii+2)/...
AL2(ii,ii))/ (B(ii+1)*AL2(ii+1,ii+1) ...
+ B(ii+2)*AL2(ii+1,ii+2) + B(ii+3)*...
AL2(ii+1,ii+3));
AL3(ii,ii+1)= AL2(ii,ii+1)/AL2(ii,ii)+ ...
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
44
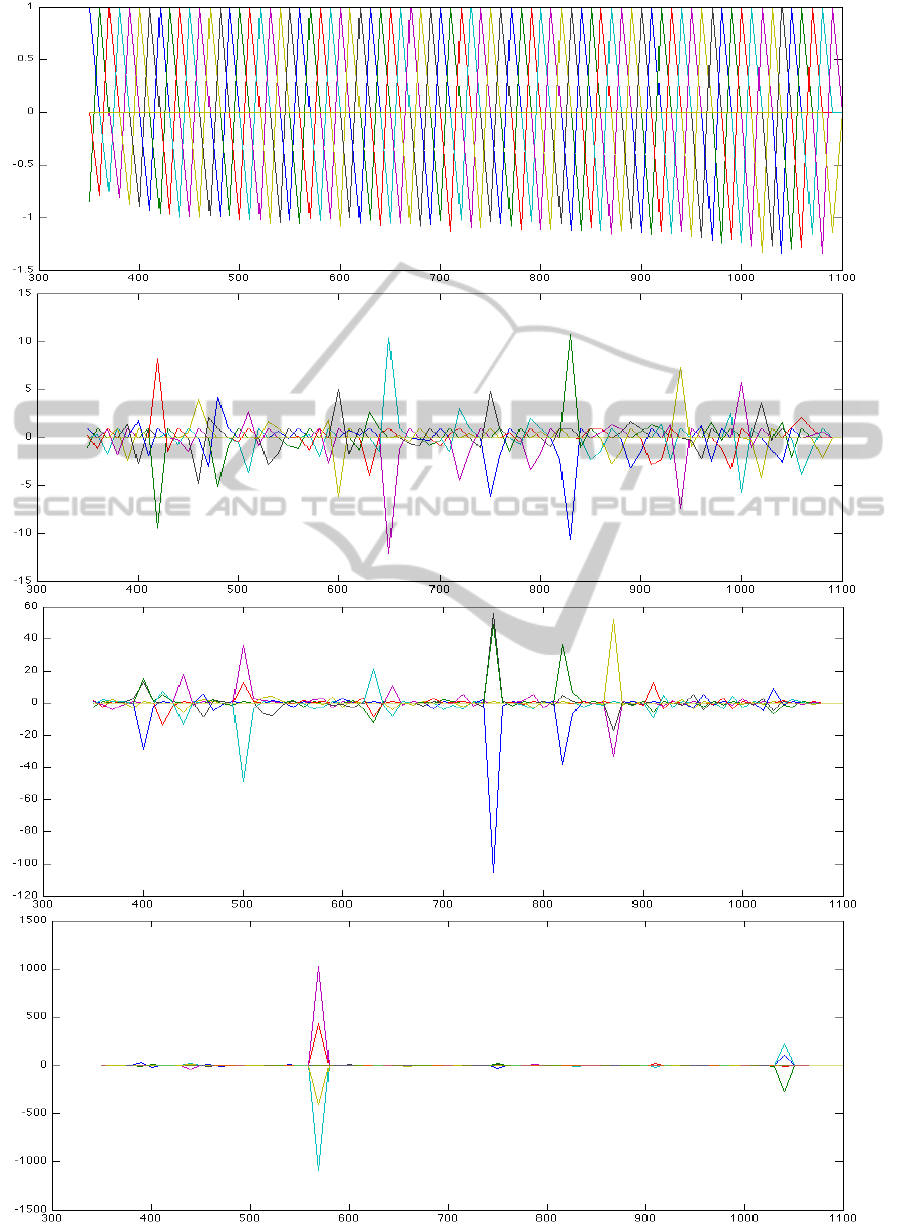
Figure 6: Obtention of the kernel K (in bottom row) of [p,r,g,b]
T
: R
76
→ R
4
. In each graph, respectively from above, 75,
74, 73 and 72 row vectors are plotted.
TetrachromaticMetamerism-ADiscrete,MathematicalCharacterization
45
BETA*AL2(ii+1,ii+1);
AL3(ii,ii+2)= AL2(ii,ii+2)/AL2(ii,ii)+ ...
BETA*AL2(ii+1,ii+2);
AL3(ii,ii+3)= BETA*AL2(ii+1,ii+3);
end
figure; plot(L,AL3)
\end{small}
AL4= zeros(76,72);
for ii=1:72
AL4(ii,ii)= 1;
BETA= -(P(ii) + P(ii+1)*AL3(ii,ii+1)/...
AL3(ii,ii) + P(ii+2)*AL3(ii,ii+2)/AL3(ii,ii)...
+ P(ii+3)*AL3(ii,ii+3)/AL3(ii,ii))/(P(ii+1)*...
AL3(ii+1,ii+1) + P(ii+2)*AL3(ii+1,ii+2) +...
P(ii+3)*AL3(ii+1,ii+3) + P(ii+4)*...
AL3(ii+1,ii+4));
AL4(ii,ii+1)= AL3(ii,ii+1)/AL3(ii,ii) + ...
BETA*AL3(ii+1,ii+1);
AL4(ii,ii+2)= AL3(ii,ii+2)/AL3(ii,ii) + ...
BETA*AL3(ii+1,ii+2);
AL4(ii,ii+3)= AL3(ii,ii+3)/AL3(ii,ii) + ...
BETA*AL3(ii+1,ii+3);
AL4(ii,ii+4)= BETA*AL3(ii+1,ii+4);
end
In the MATLAB code below, get 4x4 submatrix with
largest determinant, then get t (METAMER) for, e.g.
c = [
1
4
,
1
4
,
1
4
,
1
4
].
%
AL= transpose(AL);
iii=1
DETMAX= 0;
for ii = 1:73
for jj= ii+1:74
for kk = jj+1:75
for ll = kk+1:76
AL4x4=[AL(1, ii), AL(1,jj), AL(1,kk), AL(1, ll);...
AL(2, ii), AL(2,jj), AL(2,kk), AL(2, ll);...
AL(3, ii), AL(3,jj), AL(3,kk), AL(3, ll);...
AL(4, ii), AL(4,jj), AL(4,kk), AL(4, ll);];
DET= abs(det(AL4x4));
iii=iii+1;
if DET > DETMAX;
DETMAX= DET;
ii1=ii;
jj1=jj;
kk1=kk;
ll1=ll;
AL4= AL4x4;
end
end
end
end
end
iii= iii-1
AL4
det(AL4)
AL4INV=inv(AL4)
METAMER= AL4INV*[0.25;0.25;0.25;0.25]
4 TETRACHROMATIC HUE
METAMERISM
For us humans, two colours may have the same satu-
ration, the same luminance or the same hue. When
studying the colour vision of a tetrachromatic ani-
mal, it may be interesting to design an experiment
to find out if the animal can distinguish hue while
disregarding luminance and saturation. In this sense,
we call two spectra hue-metameric if they give rise
to colour points on the same chromatic triangle (Re-
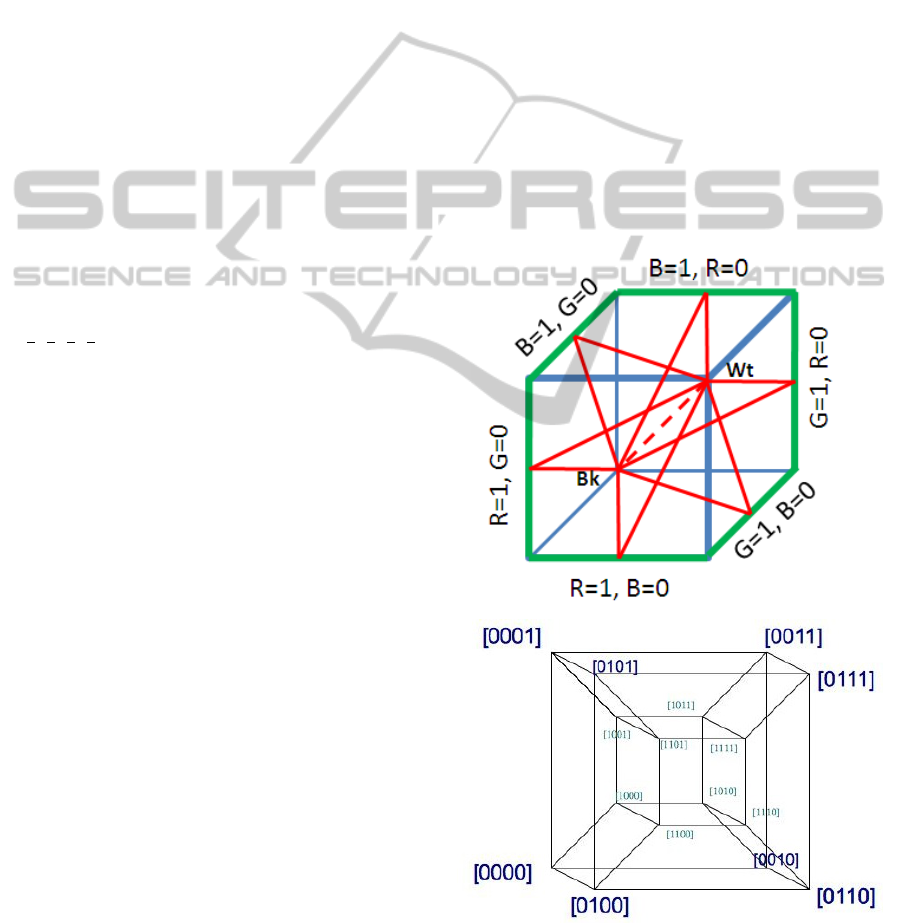
strepo, 2011); see Figure 7. In the colour hypercube
(Restrepo, 2012) you also have the achromatic seg-
ment and instead of a chromatic hexagon, you have
a chromatic icositetrahedron; the triangles having as
base the achromatic segment and as opposing a ver-
tex a point in the chromatic icositetrahedron are called
chromatic triangles and all colours in each such trian-
gle are said to have the same hue.
Figure 7: Chromatic triangles in RGB cube and hypercube.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
46

5 CONCLUSIONS
Tetrachromacy and in particular tetrachromatic
metamerism is a subject well worth of attention. It
has applications both in computer vision and in the
modeling of biological vision systems. The subject
of tetrachromatic metamerism in computer vision has
applications for example in detection, in satellite im-
ages.
In our case, we have three types of cone pho-
topigment S(λ), M(λ) and S(λ) and it may be ar-
gued that from them, three other channels L + M + S,
(L+S)−M and (L+M)−S are derived. It is an inter-
esting fact of our colour vision that we have four per-
ceptual unique hues red, green, blue and yellow; per-
haps they are in a one-to-one correspondence with the
three channels S + L (”band-stop”), M (band-pass), S
(low-pass) and L + M (high-pass). The fact that the
L channel does not appear in an isolated form here,
might have to do with the fact that it was the last to
evolve.
It would be interesting to know how these facts ex-
trapolate in cases of the vision systems tetrachromatic
animals. One possibility is that they might perceive 6
unique hues, corresponding to the cases W + X (low-
pass), Y + Z (high-pass), X + Y (band-pass), W + Z
(stop-band) and, W +Y and X + Z (alternate band).
In a trichromatic context, (Cohen, 1964) has
shown how the reflectance spectra (samped at N=40
wavelengths) of a set of 150 Munsell chips, turned out
to be nearly three-dimensional; i.e. each spectrum is
nearly a linear combination of certain three spectra.
The analysis of large sets of natural reflectance spec-
tra surely gives interesting results.
In a tetrachromatic vision system, the use detector
with a bell response curve having a peak between
those of the S and M detectors, could prove to be
useful to differentiate between certain types of cyan
allowing the perception a certain type of cyan as a
unique and not as a combination of green and blue.
This would be certainly useful for marine vision
since short-wavelength light penetrates water more
than other wavelengths.
Typically, receptor curves are unimodal. In biol-
ogy, although not always in engineering as the exam-
ple in Section 3 shows, each receptor curve ”aperure-
samples” the visible spectrum, each sampling the en-
ergy in a, maybe overlapping, interval. In engineer-
ing, the use of detectors of comb spectra might be
useful as well.
ACKNOWLEDGEMENTS
We thank mathematician Ana Hern
´
andez for many in-
teresting discussions on the subject that helped to clar-
ify many ideas.
REFERENCES
Cohen, J. (1964). Dependency of the spectral reflectance
curves of the munsell color chips. Psychon Sci. , vol
1, pp.369-370.
Cohen, J. and Kappauf, E. (1982). Color stimuly, funda-
mental metamers and wyszecki’s metameric blacks.
The American Journal of Psychology, Vol. 95, No. 4,
pp. 537-564.
Jevbratt, L. (2013). Zoomorph - software simulating how
animals see. zoomorph.net.
Restrepo, A. (2011). Colour processing in runge space.
SPIE Electronic Imaging, San Francisco.
Restrepo, A. (2012). Tetrachromatic colour space. SPIE
Electronic Imaging, San Francisco.
Restrepo, A. (2013a). Colour processing in tetrachromatic
colour spaces. Visapp Rome.
Restrepo, A. (2013b). Hue processing in tetrachromatic
spaces. SPIE Electronic Imaging, San Francisco.
TetrachromaticMetamerism-ADiscrete,MathematicalCharacterization
47
