
Multi Touch Shape Recognition for Projected Capacitive
Touch Screen
I. Guarneri
1
, A. Capra
1
, G. M. Farinella
2
, F. Cristaldi
2
and S. Battiato
2
1
STMicroelectronics, Computer Vision Group, Stradale Primosole, Catania, Italy
2
Department of Mathematics and Computer Science, University of Catania, Catania, Italy
Keywords: Shape Recognition, Projected Capacitive Touch Screen, Mutual Sensing.
Abstract: Devices equipped by touch screens are nowadays widely diffused. One of the most meaningful factor which
leads to this success is their easy and intuitive interface which allows a friendly user-device interaction.
Touch shape recognition is a topic which has contributed to the realization of these types of interfaces. In
this paper we propose a solution able to discriminate among different classes of touch shapes. We focus on
the problem of recognizing typical touches performed in mid-sized devices as tablets and phablets. The
proposed solution discriminates among single finger, multiple fingers and palm by reaching high
recognition accuracy and maintaining a low computational complexity.
1 INTRODUCTION
In the last decade the sale of the hand held devices
has reached high volumes and the diffusion of these
devices has increased the need to improve the user-
device interaction through simple and intuitive
interfaces. The great revolution in this field has been
determined by the introduction of the touch screen in
the market. The selection of a functionality by
touching the screen is a natural gesture which allows
the user to interact with the device in a more easy
and clear way. The effort of researchers is to further
improve the touch screen functionalities by
developing new algorithms to support the human-
device interaction.
Some of the classic touch based functions are the
zooming, the rotation of images and the scrolling of
web pages. However, with the wide diffusion of
high screen size (from 5” to 10”) new problems must
be solved in performing the recognition of the touch.
Due to the screen size, it can happen that some
conductive human parts can touch the screen
together with the fingers. For example, a desirable
feature is the recognition of the palm touching the
panel; this involuntary touch usually inhibits other
touch functionalities such as the selection of an icon
or scrolling of pictures, etc. Another example is the
keyboard device tapping with fingers and
simultaneously touching the screen with the palm.
To effectively use the device, the touch recognition
engine should be able to recognize the palm touches
and reject them.
Another shape to be recognized, to improve the
interface interaction, is the ear touch (Guarneri et al.,
SPIE 2013). The presence of this shape is possible in
phablets (having around a 5” screen size) and for
devices having lower panel resolution. The
recognition of this class could allow the elimination
of the proximity sensor used for switching from the
touch to the talk functionality.
Although the shape recognition is a key topic
discussed in different application context (Escalera
et al., 2011; Azzaro et al., 2011; Zhang et al., 2004;
Daliri et al., 2008; Belongie et al., 2002; Battiato et
al., 2012; Farinella et al., 2006), it is not yet widely
discussed in the context of touch screens and few
works have been proposed in literature. Zhang et al.
(2011) proposed a technique able to discriminate
among different shapes acquired by touching
displays. The authors exploit the integral image
obtained by summing the signals data along rows
and columns. The obtained x and y curves are
segmented into peaks and valleys and the finger
identification is obtained by applying a threshold on
peaks values. Despite the method is fast, it cannot
guarantee robustness when shapes are obtained in
critical conditions, such as in the case of slightly wet
fingers (Guarneri et al. ICCE 2013). Westermann
(2008) identifies and discriminates between
fingertips, thumbs, palms and cheeks. In order to
111
Guarneri I., Capra A., Farinella G., Cristaldi F. and Battiato S..
Multi Touch Shape Recognition for Projected Capacitive Touch Screen.
DOI: 10.5220/0004665601110117
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 111-117
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
extracts all simultaneous touches the input
capacitive map is firstly segmented. Then a measure
of the regularity of each patch is computed as the
ratio of a patch’s spatial energy minus its peak
energy to the patch‘s total energy. The eccentricity
of the shape is also computed for each patch. The
shape discrimination is mainly based on two
parameters: the eccentricity and the regularity.
Thumb contacts are distinguished from fingertip
contacts using the patch eccentricity feature; the
cheek is discriminated from the ear because the
former is considered a regular shape, while the latter
is considered a not regular shape.
Guarneri et al. (SPIE 2013) proposed a shape
recognition engine to discriminate typical shapes in
devices equipped by a touch panel lower than 5”
size: finger, ear, cheek, hand held. The authors
presented a technique which exploits different shape
descriptors such as the area, the connections degree,
the filling degree, the central and peripheral number
of not touched lines. Another work of Guarneri et al.
(ICCE 2013) proposed a shape recognition method
based on Principal Component Analysis
transformation coupled with decision tree for
classification. This approach regards mainly devices
with a panel up to 4” size. It is a multi-touches
technique focused on the discriminations of finger/s
versus palm. The authors also investigated cases of
recognition wet panel.
This paper proposes a solution for multi touch
shape recognition built on Guarneri et al. (SPIE
2013, ICCE 2013). With respect to the previous
solution the technique proposed here has a low
computational complexity and takes into account
more shape classes. Moreover, temporal check is
introduced to have a more robust recognition engine.
The paper is organized as follows: Section 2
details the proposed multi touches recognition
system. In Section 3 the HW prototype used in the
experiments is briefly summarized. Section 4 reports
the experimental results. Finally, Section 5
concludes the paper.
2 PROPOSED MULTI TOUCHES
RECOGNITION
The proposed solution takes into account the
following ten classes of touches: one or more
isolated fingers (up to five fingers), two or more
fingers touching each other (up to five fingers) and
the palm. The involved technique can be easily
extended to more than five touching fingers; this
value has been chosen just because it is usually the
maximum number of fingers used to perform typical
gestures as scrolling or flipping. Conversely, for
isolated fingers there is not a limited number.
Three main steps are involved in the proposed
pipeline: capacitance map segmentation, shape
representation, and shape recognition.
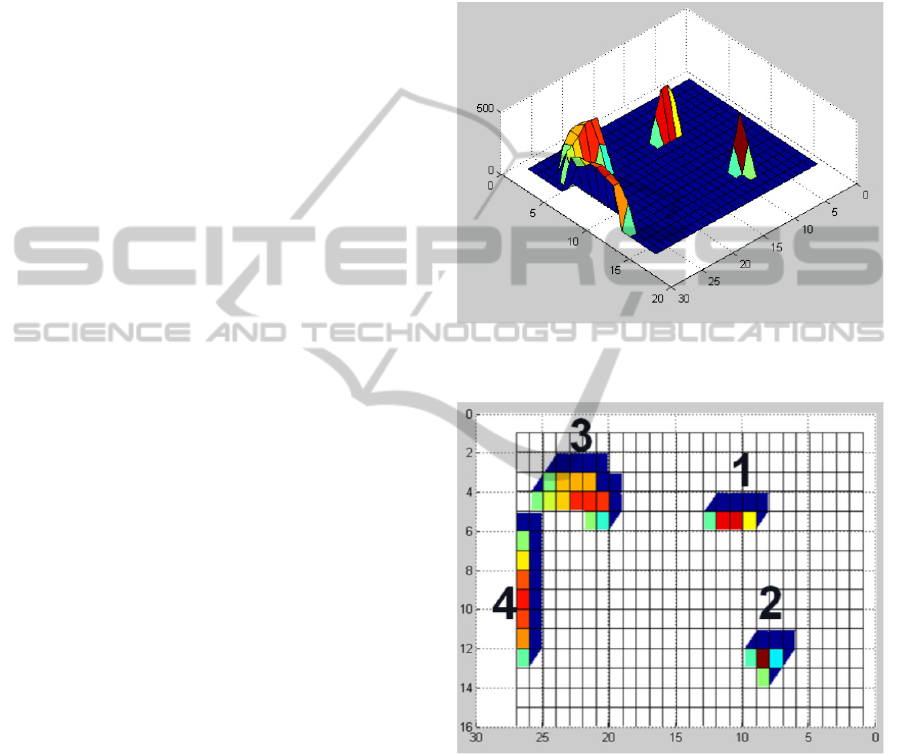
Figure 1: The capacitance map presents three touches: two
fingers and a palm.
Figure 2: 2D representation of the capacitance map
showed in Figure 1; two fingers (patches 1 and 2) and a
palm (patches 3 and 4).
2.1 Capacitance Map Segmentation
To deal with noisy spikes, a noise removal filter is
applied to each acquired capacitance matrix (i.e., a
16×27 matrix containing raw data). The filtered
frames are then analysed and cells are aggregated
into a patch using a watershed like algorithm
(Gonzalez, 2008). Through the patches aggregation
step, the number of sensed capacitive nodes is
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
112

Figure 3: Representation of the four extracted patches. The
bounding box, with highlighted the left- up vertex point, is
shown for each patch.
computed, and we used this value to perform a first
selection of patches to be classified. Differently
than previous work (Guarneri et al., ICCE 2013), we
don’t need to normalize and rotate each single shape
considering the shape representation described in
Section 2.2. Figure 1 shows the 3D plot of the
capacitance map relative to three contemporary
touches: two fingers and a palm. It should be noticed
that the palm is constituted by two predominant
parts, which are correctly extracted as two patches
by the watershed algorithm. Considering as example
the map reported in Figure 1, after the segmentation
step four patches are extracted: two relative to
fingers and two constituting the palm touch. Figure 2
shows the 2D representation of the map reported in
Figure 1 with over-imposed the labels of the four
extracted patches. After the segmentation step, the
patch is described to recognize the patch 1 and 2 as
fingers whereas the patch 2 and 3 as palm (not
fingers).
2.2 Shape Representation
Each patch can be considered as a group of nodes
with a maximum and the remaining nodes with
lower values. The first feature of the patch relates
the area in terms of number of nodes. Patches
formed by a single node are not processed for the
final recognition. This minimum area size has been
fixed taking into account the resolution and the
sensibility of the used panel, but it can be modified
depending on different hardware settings. The shape
size, in term of nodes number, is used to fix the
minimum finger size. We represent a patch by using
two descriptors, the height and the width of the
bounding box containing the patch. The computation
of the contouring box is based on the comparison of
x and y values of all nodes forming the shape.
Through this fast comparison we compute two
points: the first one having as abscissa the lower x-
value of all expressed nodes and as ordinate, the
minimum y-value of all expressed nodes. The
coordinate pair of the second point is found by
looking for the maxima x and y of all expressed
nodes. Hence, for each box patch we compute its
width, its height, its area and the coordinate pair of
its left-up corner (Figure 3). The area is used as first
filtering: patches too small are excluded for final
recognition. The width and the height are used to
identify a potential finger. The left-up corner,
together with the width and the weight of the
bounding box, are used for the temporal check
described in the Section 2.4. Figure 3 shows the
graphical representation of the four boxes computed
for each patch showed in Figure 2.
2.3 Shape Recognition
The recognition of different classes is performed by
a decision tree (Quinlan, 1993) trained on a set of
capacitive maps manually labeled. The
discrimination is based on the width and height of
the bounding box. In order to have a more effective
classification, a further check is performed to verify
the adjacency between patches. So, width and height
of the boxes are used to discriminate finger from
others. These information are also used to verify if a
patch is overlapping/adjacent with other patches.
This last check is performed by comparing the
intersection of the box contours of all patches and it
is done to verify if a patch is completely isolated
from others or if it is in touch with other patches. In
case of two or more adjacent or overlapped patches,
the presence of a not finger patch forces to be the
classification of all other adjacent patches in the
same class.
Figure 4 shows a map representing a palm touch.
After the segmentation, two bounding boxes have
been extracted. In this case one of the two boxes (the
little/blue one) is a potential finger, as well as it is
verified the overlapping with other non-finger
patches.
Since the bigger/yellow one does not satisfy the
constraints of finger for width and height, it is a
Figure 4: Map showing a palm touch. Two patches have
been extracted. The patches have an overlap and, due to
the fact that one of them is a potential not finger (the
yellow/bigger one), also the other patch (the blue/little
one) is classified as not finger (i.e., a palm).
MultiTouchShapeRecognitionforProjectedCapacitiveTouchScreen
113
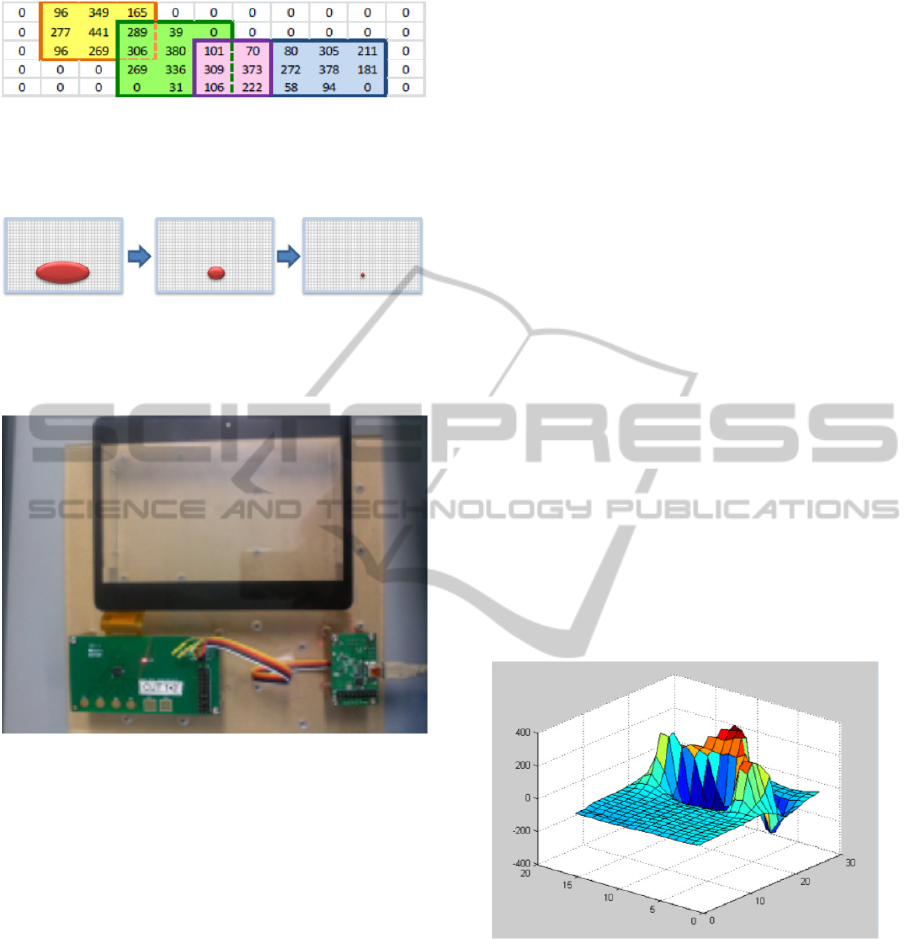
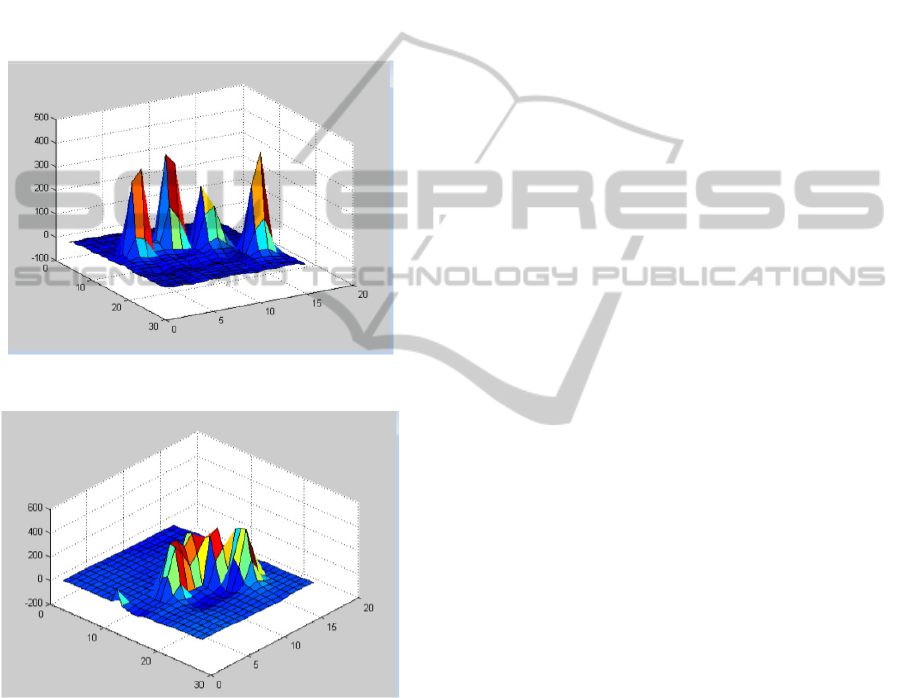
Figure 5: Map showing four fingers touching each other.
The patches are all overlapping and since each patch is
classified as finger (i.e., no one is classified as not finger),
the final class will be “4 finger”.
Figure 6: Three toy frames representing a stylized palm
touching the panel during its removal from the screen. Due
to reduction of the shape size it can happen that the latest
two frames can be wrongly classified as a finger.
Figure 7: Board prototype equipped by a 7” screen size.
potential not finger (i.e., a palm), and the final
classification for the little patch is also a not finger
(i.e., a palm).
Figure 5 reports an example of four fingers and
their relative boxes touching each other. For each
box, the intersection with the other patches is
verified. Since all of them are potential fingers their
final classification is “4 fingers”. In order to reduce
the false finger rate, we perform a further check on
the potential finger patches. This analysis aims to
take into account the history (in time) of a touch
shape classification. Details about that temporal
check are reported in the following section.
2.4 Temporal Analysis
One of the most critical conditions for shape
recognition regards the moment when a palm is
removed from the display. A toy example showing
this condition is reported in Figure 6, where it is
represented a
stylized palm removed from the panel.
From the first to the third frame the palm changes its
shape. In these transition steps, the touch of the palm
changes in terms of area size, from a big to a small
one. This induces a wrong classification of the palm
shape because its shape becomes more similar to a
finger. To reduce the rate of wrong classifications
relative to this specific condition, a temporal
analysis has been introduced into the classification
process. Each time a patch is a potential finger a
check taking into account the touched area in
previous classified frames is performed. In case of
intersection/overlaying with a patch which was
classified as not finger in previous frames, than the
current potential finger patch is classified as a not
finger. This allows a better classification accuracy of
the palm when is it removed from the screen.
The temporal check can introduce an unwished
behaviour. When the algorithm wrongly classifies a
finger touch as a not finger (just because it does not
pass the width and height test), then it can happen
that the temporal analysis will propagate this error
through the next successive frames, so we lose many
right finger classifications. To avoid that
propagation a counter has been introduced to force a
reset, in this way a too old shape classification
cannot lead to a wrong classification.
Figure 8: Capacitive map related to a palm touch.
3 HARDWARE PROTOTYPE
To acquire the capacitive maps for testing purposes
we have used the board prototype shown in Figure 7.
The board is equipped with a 7” capacitive
screen size, STM32 processor and STMT05
microcontroller.
The board is connected to the PC through a USB
cable. The developed embedded software allows to
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
114
store sequence of frames, each frames is a matrix of
16x27 capacitive nodes. The maps show the
presence of spike noise due to the high sensitive of
nodes. To handle this type of noise the capacitive
values are filtered by applying a threshold at the
beginning of the software pipeline. The threshold
value has been fixed by considering the range of
capacitive node magnitudes. A too low threshold
value guarantees the elimination of noise spikes but
it can cause the loosing of important data relative to
touches. On the contrary a too high threshold could
not eliminate the noisy data.
Figure 9: Capacitive map related to four separated fingers.
Figure 10: Capacitive map related to four touching finger.
4 EXPERIMENTAL RESULTS
The proposed technique has been tested on a dataset
of 3000 capacitive maps related the following ten
classes involved in the experiments: single finger,
two separated fingers, two touching fingers, three
separated fingers, three touching fingers, four
separated fingers, four touching fingers, five
separated fingers, five touching fingers, palm. The
palm shape is strongly deformable because it
changes in size and also it can be split in two o or
more subparts. In case of multi split division the
algorithm must be able to classify each single part as
belonging to the palm shape.
Figure 8 shows an example of a palm touching
the panel and producing two separated touched area
on the screen device. Figure 9 shows an example of
four separate fingers, whereas Figure 10 shows a
capacitance map related to four touching fingers. As
first, we tested the proposed solution without
temporal checking. Each frame has been classified
independently without considering the classification
of the previous frames. The results have been
collected in the confusion matrix reported in Table
1. The test has been then repeated enabling the
temporal analysis. The results obtained in this last
experiment are reported in Table 2.
Analyzing the results reported in the two
confusion matrixes (Table 1 and 2) it can be
observed that the palm class is the one which
reaches an improvement around of 50% when the
temporal check is performed. This improvement is
due to the fact the palm changes its area size
whether the palm is removed from the screen. In
these two critical steps many palm shapes are
wrongly classified as fingers. By using the temporal
check many palm maps wrongly classified are
correctly classified. Due to its simple
implementation, the temporal check requires a low
computational complexity (it is performed by storing
three binary labels with the classification type, palm
or finger, of the current patch in the three previous
frames).
5 CONCLUSIONS
In this paper we proposed a solution for multi
touches recognition for capacitive displays. The
main aim is the discrimination of multi touch fingers
against the palm touch. The representation of shapes
through the presented simple features allows the
recognition of the different classes of touches. The
proposed technique obtains good performances in
terms of classification accuracy. Future works will
be devoted to increase the recognition accuracy,
augmenting also the number of classes to be
recognized. Moreover, algorithms to recognize
multi-fingers gestures could be useful for application
such as zooming, rotation and flipping of pictures.
MultiTouchShapeRecognitionforProjectedCapacitiveTouchScreen
115
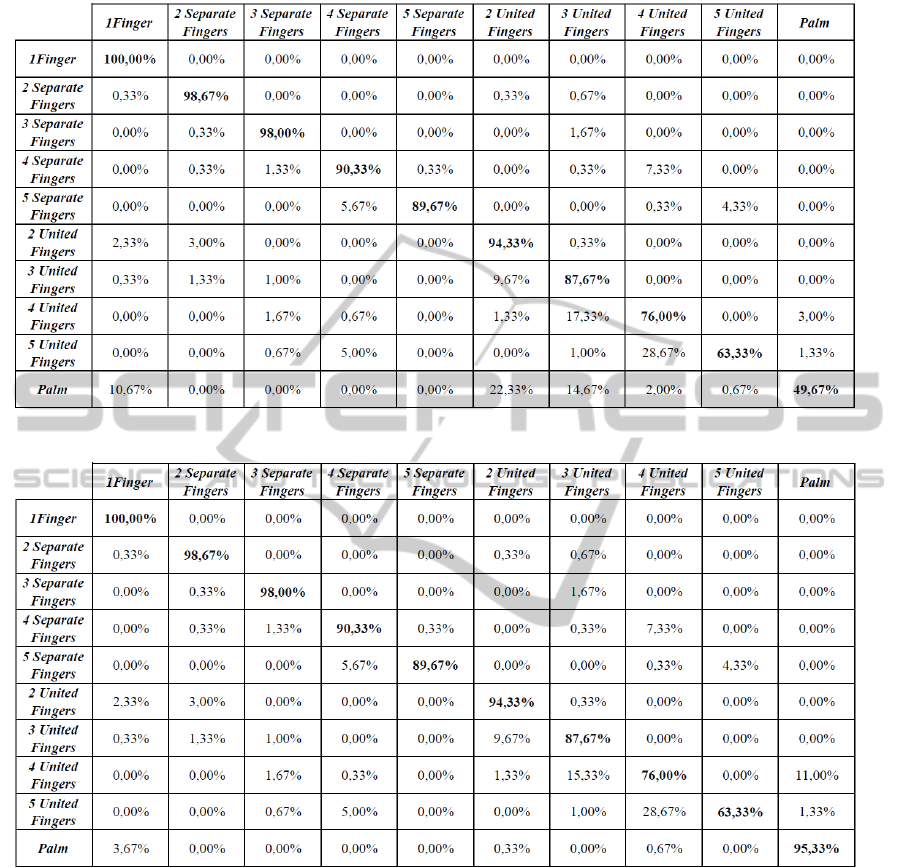
Table 1: Results obtained by the proposed approach without temporal check.
Table 2: Results obtained by the proposed approach considering temporal check.
REFERENCES
Zang, J., Guo, Y., Mo, L. (2011). Multi-Touch Detection
Method for Capacitive Touch Screens. US
2011/0221701 A1.
Westerman, W. C., (2008). Multi-Touch Input
Discrimination. US Patent 0158185.
Gonzalez, R.C., Woods, R.E., (2008). Digital Image
Processing, Prentice Hall, 3
rd
edition.
Guarneri, I., Capra, A., Farinella, G. M., Sebastiano, B.,
(2013). Shape Recognition for Capacitive Touch
Display. In SPIE-IS&T Annual Symposium Electronic
Imaging Science and Technology - Image Processing:
Machine Vision Applications VI (EI117).
Guarneri, I., Capra, A., Castorina, A., Battiato, S.,
Farinella, G. M, (2013). PCA Based Shape
Recognition for Capacitive Touch Display. In IEEE
International Conference on Consumer Electronics
(ICCE).
Escalera, S., Fornés, A., Pujol, O., Llados, J., Radeva, P.
(2011). Circular Blurred Shape Model for Multiclass
Symbol Recognition. IEEE Transactions on Systems,
Man, and Cybernetics 41 (2), pp. 497-506.
Azzaro, G., Caccamo, M., Ferguson, J., Battiato, S.,
Farinella, G. M., Guarnera, G., Puglisi, G., Petriglieri,
R., Licitra, G. (2011). Objective Estimation of Body
Condition Score by Modeling Cow Body Shape from
Digital Images, Journal Dairy Science 94 (4) , pp.
2126-2137.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
116

Zhang, D., Lu, G. (2004). Review of Shape Representation
and Description Techniques, Pattern Recognition
37(1), pp. 1-19.
Daliri, M. R., Torre, V. (2008). Robust Symbolic
Representation for Shape Recognition and Retrieval.
Pattern Recognition 41 (5), pp. 1782-1798.
Belongie, S., Malik, Y., Puzicha, J. (2002). Shape
Matching and Object Recognition Using Shape
Contexts. IEEE Transactions on Pattern Analysis and
Machine Intelligence 24 (4), pp. 509-522.
Battiato, S., Farinella, G. M., Giudice, O., Puglisi, G.
(2012) . Aligning Bags of Shape Contexts for Blurred
Shape Model Based Symbol Classification, IAPR
International Conference on Pattern Recognition.
Farinella, G. M., Impoco, G., Gallo, G., Spoto, S.,
Catanuto, G., Nava, M. B. (2006). Objective Outcome
Evaluation of Breast Surgery, in Medical Image
Computing & Computer Assisted Intervention.
Quinlan, J. R. (1993). C4.5 Programs for Machine
Learning, Morgan Kaufmann Publishers.
MultiTouchShapeRecognitionforProjectedCapacitiveTouchScreen
117
