
Efficient Registration of Multiple Range Images for Fully Automatic 3D
Modeling
Yulan Guo, Jianwei Wan, Jun Zhang, Ke Xu and Min Lu
College of Electronic Science and Engineering, National University of Defense Technology, Changsha, China
Keywords:
Range Image, 3D Modeling, Local Feature, Feature Matching, Registration.
Abstract:
Multi-view range image registration is a significant and challenging problem for 3D modeling. This paper
presents a reference shape based multi-view range image registration algorithm. First, a set of Rotational
Projection Statistics (RoPS) features are extracted from the input range images. Next, the reference shape
is initialized by selecting a range image from the input. The reference shape is then iteratively updated by
registering itself with the remaining range images. The registration between the reference shape and any range
image is completed by RoPS feature matching. Finally, all input range images are registered according to their
corresponding reference shapes. A number of experiments were performed to test the performance of our
algorithm. The experimental results show that the reference shape based algorithm can perform multi-view
registration on a mixed set of unordered range images corresponding to several different objects. It is also very
accurate and efficient. It outperformed the state-of-the-arts including the spanning tree based and connected
graph based algorithms.
1 INTRODUCTION
3D models of objects play significant roles in an in-
creasing number of applications including cultural
heritage, entertainment, education, medical industry,
manufacturing and robotics (Johnson and Bing Kang,
1999; Assfalg et al., 2007; Alexiadis et al., 2013; Guo
et al., 2013b). A 3D model can either be created
by using Computer Aided Design (CAD) tools or 3D
scanning techniques (Chen and Medioni, 1992). Due
to the increasing availability of low-cost and dense
3D scanners, range images are becoming more ac-
cessible (Guo et al., 2013a; Lei et al., 2013). 3D
modeling from range images have became the main
research trend when dealing with free-form objects
(Dorai et al., 1998). The task of 3D modeling is to
register and integrate several range images which are
acquired from multiple viewpoints so that the surface
of an object can be completely covered (Rusinkiewicz
et al., 2002; Mian et al., 2006a).
Multi-view range image registration can be com-
pleted either manually or automatically. Since auto-
matic 3D modeling does not require any human in-
tervention (e.g., a calibrated scanner and turntable,
or attached markers), it is more applicable to real-
world scenarios compared to its manual counterpart
(Salvi et al., 2007). The main challenge for automatic
3D modeling is the recovering of the correspondence
information between overlapping range image pairs
(Mian et al., 2006a). This problem becomes even
more difficult when the input range images are un-
ordered and from multiple different objects.
Several multi-view registration algorithms have
been proposed to establish correspondences be-
tween unordered range images (Huang and Pottmann,
2005). (Huber and Hebert, 2003) registered all pairs
of input range images to produce a model graph. The
model graph was then used to build a spanning tree
which was pose consistent and globally surface con-
sistent. All multi-view range images were finally
registered based on the spanning tree. Later, (Ma-
suda, 2009), (Bariya et al., 2012) and (Tombari et al.,
2010) also used spanning tree based algorithms to
perform multi-view range image registration. How-
ever, they employed different features, namely Log-
Polar Height Map (LPHM), Signature of Histograms
of OrienTations (SHOT) and exponential map, to reg-
ister any two range images. Given a set of N
m
in-
put range images, the computational complexity of
the spanning tree based algorithms is O
N
2
m
as they
need to exhaustively register every pair of range im-
ages. (Mian et al., 2006a) proposed a connected graph
based algorithm, which is more efficient compared
to the spanning tree based algorithms. (Guo et al.,
96
Guo Y., Wan J., Zhang J., Xu K. and Lu M..
Efficient Registration of Multiple Range Images for Fully Automatic 3D Modeling.
DOI: 10.5220/0004667200960103
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 96-103
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: An illustration of the generation of a RoPS feature descriptor for one rotation. Originally shown in (Guo et al.,
2013b).
2013c) proposed a Tri-Spin-Image (TriSI) feature for
range image representation and also used the con-
nected graph based algorithm for multi-view range
image registration. (ter Haar and Veltkamp, 2007)
selected quadruples of range images to form incom-
plete 3D models of an object. These quadruples were
further verified and aligned to obtain the final regis-
tration result. This algorithm is computational effi-
cient. However, it requires that each quadruple should
cover the entire object, and range images which cover
a small part of an object cannot be registered (ter Haar
and Veltkamp, 2007).
In this paper, we propose a fully automatic, accu-
rate and efficient multi-view range image registration
algorithm. The algorithm starts by selecting a range
image from all input range images as the initial ref-
erence shape. The reference shape is then iteratively
updated by performing pairwise registration between
itself and the remaining range images in the search
space. Consequently, all input range images are reg-
istered during the process of reference shape grow-
ing. Performance evaluation results show that the pro-
posed reference shape based algorithm is very accu-
rate. It can accomplish multi-view registration on a
mixed set of unordered range images corresponding
to several different objects. It is also more computa-
tionally efficient compared to the state-of-the-arts, in-
cluding the spanning tree based and connected graph
based algorithms.
The rest of this paper is organized as follows. Sec-
tion 2 presents the local feature extraction and match-
ing techniques. Section 3 describes the reference
shape based multi-viewrangeimage registrationalgo-
rithm. Section 4 presents the experimental results of
our proposed algorithm, with comparison to the state-
of-the-art algorithms.
2 FEATURE EXTRACTION AND
MATCHING
Local feature extraction and matching forms the basis
for the multi-view range image registration algorithm.
2.1 Feature Extraction
The local features extracted from range images should
be highly discriminative and robust to a set of nui-
sances including noise and varying mesh resolutions.
Based on the range image registration performance
achieved by using different local surface features, we
select the Rotational Projection Statistics (RoPS) fea-
ture for our work as it consistently produces the best
results. The superior performance of the RoPS feature
for 3D object recognition can also be found in (Guo
et al., 2013b). An illustration of the generation of a
RoPS feature descriptor is shown in Fig. 1.
Given a range image I
i
(in the form of a point
cloud), we first convert it into a triangular mesh M
i
.
We then detect a set of unique and repeatable fea-
ture points p
p
p
i
k
, k = 1, 2, . . . , N
i
from M
i
by performing
mesh simplification, resolution control and threshold-
ing (Guo et al., 2013b). For each feature point p
p
p
i
k
EfficientRegistrationofMultipleRangeImagesforFullyAutomatic3DModeling
97

in mesh M
i
, a local surface L
i
k
is first cropped from
M
i
for a given support radius r. Then, a unique and
unambiguous Local Reference Frame (LRF) F
i
k
is de-
rived using the eigenvectors of its local surface L
i
k
.
The points on L
i
k
are aligned with this LRF F
i
k
to
make the feature descriptor invariant to rigid trans-
formations (i.e., rotation and translation), resulting in
an aligned local surface
e
L
i
k
.
The local surface
e
L
i
k
is rotated around the x, y and
z axes respectively by a set of angles. For each ro-
tation, the points on the rotated surface are projected
onto three coordinate planes (i.e., the xy, xz and yz
planes). We first obtain an L×L distribution matrix D
of the projected points on each plane, and then calcu-
late five statistics (including central moments µ
11
, µ
21
,
µ
12
, µ
2
and entropy e) for the distribution matrix D.
These statistics for all coordinate planes and rotations
are concatenated to form an overall RoPS feature f
f
f
i
k
.
For more details on the RoPS feature, please refer to
(Guo et al., 2013b).
2.2 Pairwise Range Image Registration
Given a pair of range images M
i
and M
j
, two sets
of RoPS features F
F
F
i
=
f
f
f
i
1
, f
f
f
i
2
, . . . , f
f
f
i
N
i
and F
F
F
j
=
n
f
f
f
j
1
, f
f
f
j
2
, . . . , f
f
f
j
N
j
o
are respectively extracted from the
two range images. For a feature f
f
f
i
k
in M
i
, its cor-
responding feature f
f
f
j
k
in M
j
is obtained by search-
ing for the nearest feature in F
F
F
j
. The pair
f
f
f
i
k
, f
f
f
j
k
are considered a feature correspondence, and their
associated points c
c
c
ij
k
=
p
p
p
i
k
, p
p
p
j
k
are considered a
point correspondence. All features in F
F
F
i
are matched
against these features in F
F
F
j
, resulting in a set of
point correspondences C
ij
=
n
c
c
c
ij
1
, c
c
c
ij
2
, . . . , c
c
c
ij
N
i
o
. For
each point correspondence c
c
c
ij
k
, a rigid transformation
T
ij
k
=
R
ij
k
, t
t
t
ij
k
can be calculated using their point po-
sitions
p
p
p
i
k
, p
p
p
j
k
and LRFs
F
i
k
, F
j
k
. That is,
R
ij
k
=
F
i
k
T
F
j
k
, (1)
t
t
t
ij
k
= p
p
p
i
k
− p
p
p
j
k
R
ij
k
, (2)
where R
ij
k
is the rotation matrix and t
t
t
ij
k
is the transla-
tion vector of the rigid transformation T
ij
k
.
A set of N
i
plausible transformations are calcu-
lated from the point correspondences C
ij
. These
transformations are further grouped and verified to
produce a robust transformation T
ij
. The two range
images M
i
and M
j
are then coarsely registered using
(a) (b)
Figure 2: An illustration of pairwise range image registra-
tion. (a) A pair of range images with the correct point corre-
spondences. (b) Registered range images. (Figure best seen
in color.)
the transformation T
ij
. The registration is further re-
fined using an improved Iterative Closest Point (ICP)
algorithm by repeatedly generating pairs of closest
points in the two range images and minimizing the
residual error (Besl and McKay, 1992). Note that, a
recently proposed spare ICP algorithm (Bouaziz et al.,
2013) can alternatively be used to deal with challeng-
ing datasets affected by noise and outliers. An illus-
tration of pairwise range image registration is shown
in Fig. 2. Fig. 2(a) shows a pair of range images with
the correct point correspondences, Fig. 2(b) shows
the two registered range images.
3 MULTI-VIEW RANGE IMAGE
REGISTRATION
So far we have introduced a RoPS feature matching
based algorithm for pairwise range image registra-
tion. In this section, we propose a reference shape
based algorithm for multi-view range image registra-
tion. Fig. 3 shows an illustration of the proposed
multi-view range image registration algorithm. More-
over, the whole process is given in Algorithm 1.
Given a set of meshes
M
1
, M
2
, . . . , M
N
m
, we
initialize the search space Φ
Φ
Φ with all the input meshes.
The algorithm then starts by selecting a meshfrom the
search space as the initial reference shape R
1
, which
iteratively grows by performing pairwise registration
between itself and the remaining meshes in the search
space.
For a mesh M
i
in the search space, we use the
RoPS matching based pairwise registration algorithm
to register it to the reference shape R
1
. If the num-
ber of overlapping points is more than τ
o
times of the
number of vertices in M
i
, we consider that M
i
is suc-
cessfully registered to R
1
. We then add the vertices
in M
i
, whose shortest distances to R
1
are more than
the average mesh resolution, to the reference shape
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
98
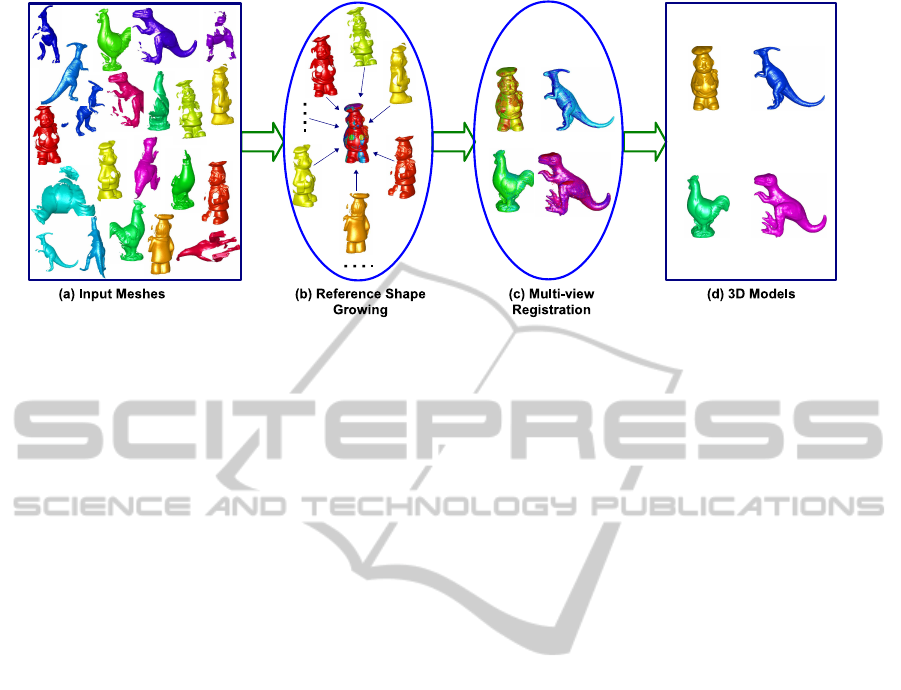
Figure 3: An illustration of the proposed multi-view range image registration algorithm.
R
1
. Consequently, the reference shape R
1
is up-
dated. We then need to generate RoPS features for
the newly updated reference shape. Since the RoPS
features have already been extracted in the previous
reference shape and the mesh M
i
. We therefore, gen-
erate RoPS features for the updated reference shape
by looking for its closest feature points in the previ-
ous reference shape and M
i
. Note that, this approach
greatly improves the computational efficiency of fea-
ture extraction as it does not require any feature calcu-
lation during the process of reference shape growing.
Once the mesh M
i
is checked, it is then removed
from the search space Φ
Φ
Φ, and the transformation in-
formation between M
i
and the reference shape R
1
is
stored. The next mesh M
i+1
in the search space Φ
Φ
Φ is
selected by turn to be registered to the updated ref-
erence shape. The growing process of the reference
shape continues until either all the meshes have been
registered to R
1
, or none mesh in the search space
Φ
Φ
Φ can further be registered to R
1
. Note that, during
the process of iterations, the surface (i.e., points) of
R
1
gradually grows into a whole complete 3D shape.
Meanwhile, the pose of R
1
keeps unchanged. Once
the growing process for the reference shape R
1
stops,
the rigid transformations between all these registered
meshes and R
1
are already known. We then trans-
form these meshes to the coordinate frame of R
1
.
Consequently, these meshes are coarsely registered.
In order to cope with the cases where the meshes
may correspond to several different objects, the algo-
rithm continues to initialize a new reference shape R
2
by picking up a mesh from the remaining meshes in
the search space. The reference shape R
2
grows us-
ing the same technique as for R
1
. Consequently, all
the meshes corresponding to reference shape R
2
are
coarsely registered. This process continues until none
initial reference shape can be built any more. Finally,
all these input meshes can separately be registered to
their corresponding reference shapes.
Once the meshes corresponding to a specific ref-
erence shape are coarsely registered, these registra-
tions are further refined with a multi-view fine reg-
istration algorithm (e.g., (Williams and Bennamoun,
2001)). The multi-view fine registration algorithm
minimizes the overall registration error of multiple
meshes, and distributes any registration errors evenly
over the complete 3D model. Finally, a continuous
and seamless 3D model is reconstructed for each ref-
erence shape by using an integration and surface re-
construction algorithm (Curless and Levoy, 1996).
Note that, the proposed algorithm is fully auto-
matic and can be performed without any manual in-
tervention. It does not require any prior information
about the sensor position, the shapes of objects, view-
ing angles, overlapping pairs, order of meshes, or
number of objects. In our case, a user can treat the
modeling process as a “black box”. The only thing
one needs to do is to import all scanned range images
to the system, and to collect the complete 3D models
after a while of running.
Compared to the spanning tree based algorithms
(Huber and Hebert, 2003; Bariya et al., 2012;
Tombari et al., 2010; Masuda, 2009), the advantages
of the proposed reference shape based algorithm are
obvious. First, it performs multi-view range image
registration more efficiently, as demonstrated in Sec-
tion 4.3. For a set of N
m
range images, its computa-
tional complexity is O(N
m
) compared to O
N
2
m
for
the spanning tree based algorithms. Second, it is ca-
pable to perform registration of multiple range images
corresponding to several different objects, rather than
from only a single object, as further demonstrated in
Section 4.4. Third, it does not suffer from cumulative
registration errors because all meshes of an object are
registered to the same reference shape. In contrast,
the registration errors between any two meshes may
EfficientRegistrationofMultipleRangeImagesforFullyAutomatic3DModeling
99

Algorithm 1: Reference shape based multi-view registra-
tion.
1: Input: Meshes
M
1
, M
2
, . . . , M
N
m
.
2: Initialization: Search space Φ
Φ
Φ ←
M
1
, M
2
, . . . , M
N
m
. Number of reference
shape n
s
← 0.
3: while Φ
Φ
Φ is not empty do
4: n
s
← n
s
+ 1.
5: Initialize reference shape R
n
s
with a mesh
from Φ
Φ
Φ.
6: repeat
7: Select a mesh M
i
from Φ
Φ
Φ and register it to
R
n
s
.
8: if Successfully registered then
9: Update the reference shape R
n
s
by adding
new points from M
i
.
10: Extract RoPS features for the updated
R
n
s
.
11: Store the transformation between R
n
s
and
M
i
.
12: end if
13: Remove the mesh M
i
from Φ
Φ
Φ.
14: until No mesh in Φ
Φ
Φ can be successfully regis-
tered to R
n
s
15: end while
16: Output: Reference shapes
R
1
, R
2
, . . . , R
n
s
,
and the transformations between reference shapes
and their corresponding meshes.
accumulate through the path in a spanning tree based
algorithm.
4 EXPERIMENTAL RESULTS
In this section, we present the performance of our al-
gorithm when tested in different circumstances. We
also compare our algorithm to the state-of-the-arts.
4.1 Experimental Setup
We used the UWA 3D Modeling Dataset (Mian et al.,
2006a) to conduct experiments. The dataset consists
of 22, 16, 16, and 21 range images respectively for
four objects, namely the Chef, Chicken, Parasaurolo-
phus and T-Rex. These range images were acquired
with a Minolta Vivid 910 scanner. We manually
aligned any two range images M
i
and M
j
and further
refined the alignment using the ICP algorithm to cal-
culate the ground truth rotation R
ij
GT
and translation
t
t
t
ij
GT
between them. We then measured the degree of
overlap as the ratio of overlapping points to the aver-
age number of points of the two aligned range images.
For a given pair of range images M
i
and M
j
, the
accuracy of registration is measured by two errors:
the rotation error ε
ij
r
and translation error ε
ij
t
. The for-
mulas for calculating the rotation error ε
ij
r
between
the estimated rotation R
ij
E
and the ground truth rota-
tion R
ij
GT
, and the translation error ε
ij
t
between the es-
timated translation t
t
t
ij
E
and the ground truth translation
t
t
t
ij
GT
, is given in (Mian et al., 2006b). A registration
of two range images was reported as correct if the ro-
tation error was less than 5
◦
and the translation er-
ror was less than 5d
res
, where d
res
stands for average
mesh resolution. Otherwise, it was considered as an
incorrect registration.
4.2 Multi-view Registration of a Single
Object
We performed multi-view registration independently
on range images of each individual object. Fig. 4 il-
lustrates the range images and the multi-view coarse
registration results of the Chicken and Parasaurolo-
phus. Although these range images were scanned
from different viewpoints and organized without any
order, they were accurately registered. No visually
noticeable defects or seams can be found in the reg-
istered range images, even in the featureless parts of
the objects (e.g., the tail of the Parasaurolophusin Fig.
4(d)).
In order to quantitatively analyze the accuracy of
our multi-view registration algorithm, we present the
number of correctly registered range images, and the
average registration errors of each individual object
in Table 1. It can be seen that all input range im-
ages of the four individual objects were correctly reg-
istered. The average rotation and translation errors of
the four objects were less than 2.5
◦
and 2d
res
, respec-
tively. Note that these results were achieved by us-
ing only the multi-view coarse registration algorithm.
These yet accurate results can further be improved
by the subsequent fine registration algorithm (e.g.,
the multi-view ICP). Generally,our algorithm enables
multi-view coarse registration to be performed auto-
matically and accurately.
4.3 Robustness to the Number of Input
Meshes
In order to evaluate the computational efficiency of
the multi-view registration algorithm with respect to
the number of input meshes, we progressively se-
lected a subset of the range images to perform multi-
view registration. For each fixed number of input
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
100
(a) (b) (c) (d)
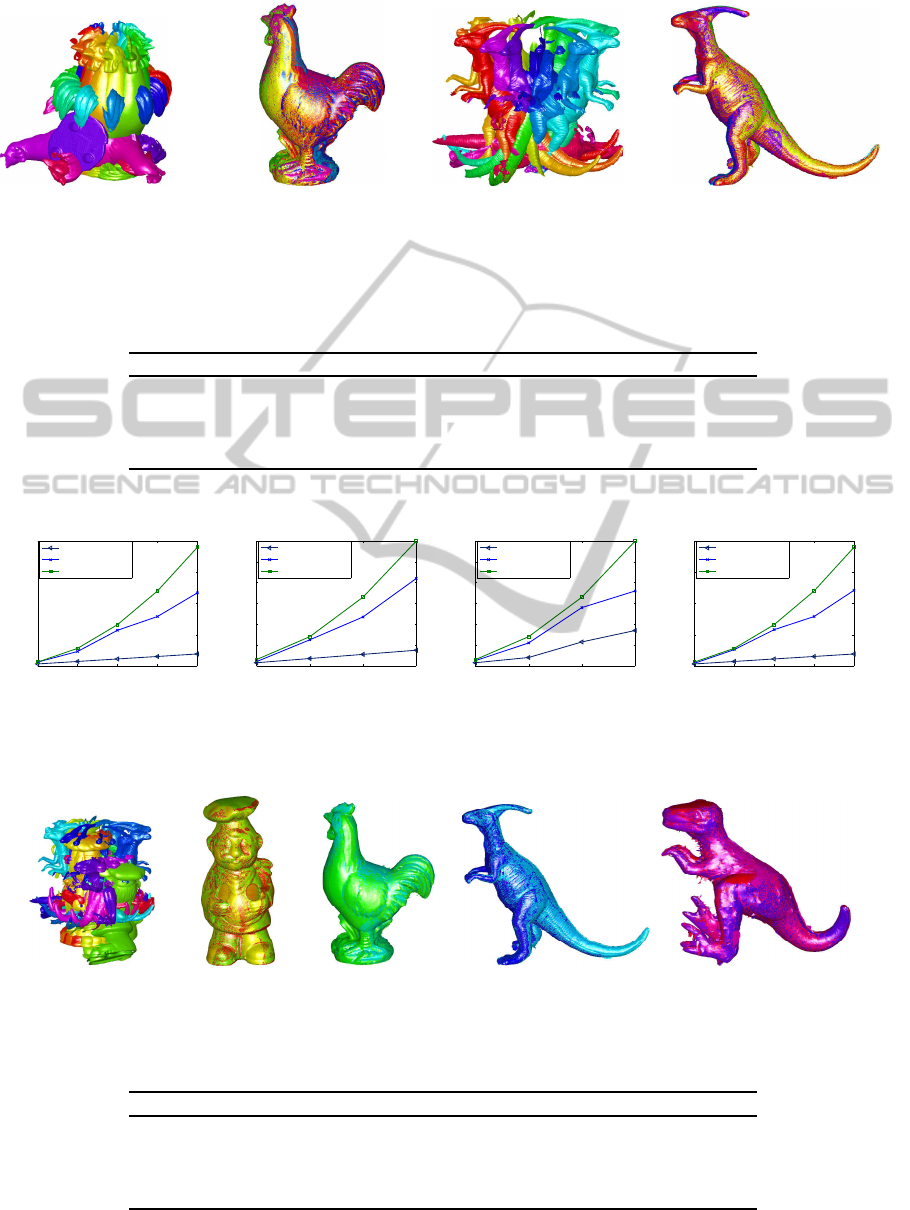
Figure 4: An illustration of multi-view coarse registration results. (a) Range images of the Chicken. (b) Multi-view registration
result of the Chicken. (c) Range images of the Parasaurolophus. (d) Multi-view registration result of the Parasaurolophus
(Figure best seen in color).
Table 1: Multi-view coarse registration results on range images of four individual objects.
Chef Chicken Parasaurolophus T-Rex
#range images 22 16 16 21
#registered range images 22 16 16 21
Rotation error ε
r
(
◦
) 2.2117 1.0075 1.0634 1.3722
Translation error ε
t
(d
res
) 1.6460 1.0936 1.6634 1.9165
4 8 12 16 20
0
50
100
150
200
No. of range images
No. of pairwise registrations
Reference shape
Connected graph
Spanning tree
(a) Chef
4 8 12 16
0
20
40
60
80
100
120
No. of range images
No. of pairwise registrations
Reference shape
Connected graph
Spanning tree
(b) Chicken
4 8 12 16
0
20
40
60
80
100
120
No. of range images
No. of pairwise registrations
Reference shape
Connected graph
Spanning tree
(c) Parasaurolophus
4 8 12 16 20
0
50
100
150
200
No. of range images
No. of pairwise registrations
Reference shape
Connected graph
Spanning tree
(d) T-Rex
Figure 5: Robustness with respect to the number of input meshes.
(a) Input meshes (b) Chef (c) Chicken (d) Parasaurolophus (e) T-Rex
Figure 6: Multi-view coarse registration of range images corresponding to multiple objects(Figure best seen in color).
Table 2: Multi-view coarse registration results on mixed range images of the four objects.
Chef Chicken Parasaurolophus T-Rex
#range images 22 16 16 21
#registered range images 22 16 16 21
Rotation error ε
r
(
◦
) 1.8656 1.1674 0.4029 1.3789
Translation error ε
t
(d
res
) 1.3627 1.0976 0.9914 1.9128
EfficientRegistrationofMultipleRangeImagesforFullyAutomatic3DModeling
101
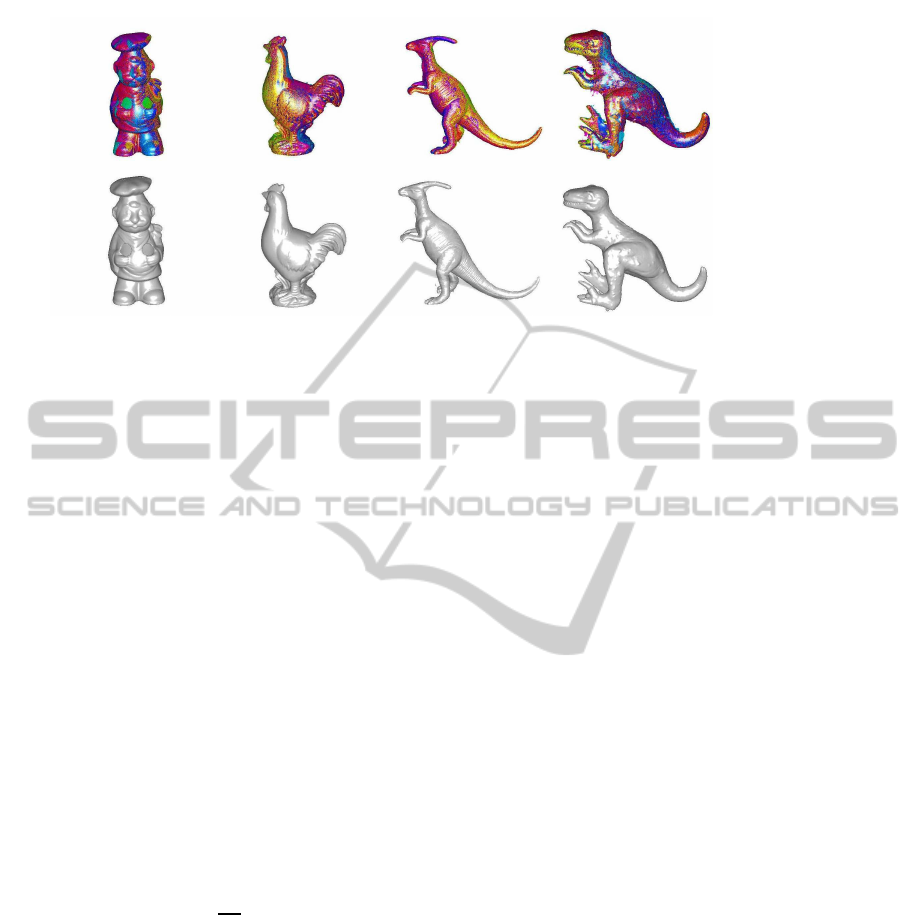
Figure 7: 3D modeling results (Figure best seen in color.)
meshes, we counted the number of pairwise registra-
tions which were needed to complete the multi-view
registration. The results for each of the four objects
are shown in Fig. 5. We also present the results of the
state-of-the-arts including the spanning-tree based al-
gorithms (Huber and Hebert, 2003; Masuda, 2009),
and the connected graph based algorithm (Mian et al.,
2006a). The spanning tree based algorithms required
C
N
m
2
pairwise registrations to perform a multi-view
registration, where N
m
is the number of input range
images and C stands for combinations. Therefore,
their computational complexity is O
N
2
m
. Our refer-
ence shape based algorithm showed a significant im-
provement compared to both the spanning tree based
and the connected graph based algorithms. It usually
completed the multi-view registration of N
m
range im-
ages with only N
m
− 1 pairwise registrations. Taking
the 20 input range images of the Chef as an example
(see Fig. 5(a)), the numbers of pairwise registrations
for the spanning tree based, connected graph based
and reference shape based algorithms were 190, 117
and 19, respectively. The improvement factor of our
reference shape based algorithm over the spanning
tree based algorithm was
190
19
= 10. Moreover, the
advantage in efficiency of the reference shape based
algorithm becomes even more significant as the num-
ber of input range images increases.
4.4 Multi-view Registration of Multiple
Objects
In order to further demonstrate the capability of our
algorithm to simultaneously register multiple mixed
range images corresponding to multiple objects, we
used all the range images of the four objects as an in-
put. These range images were mixed and were reg-
istered using our reference shape based algorithm.
As results, four reference shapes were produced by
our algorithm. The totally 75 input range images are
shown in Fig. 6(a), and the coarse registration results
for the four reference shapes are respectivelyshown in
Fig. 6(b-e). It can be seen that, all these input range
images were separately registered according to their
corresponding reference shapes. Moreover, although
fine registration was not applied to these registration
results, no visually noticeable seams can be found in
any of the registered range images.
We also present the quantitative results in Table
2. These results were almost the same as these re-
ported in Table 1. This observation clearly indicates
that the range image registration accuracy of an ob-
ject could not be affected by the existence of range
images corresponding to other objects. That is, our
algorithm is able to perform multi-view registration
correctly from a mixed and unordered range images
which correspond to several different objects.
4.5 3D Modeling Results
In order to test the whole pipeline for 3D object mod-
eling, we used the range images of the Chef, Chicken,
Parasaurolophus and T-Rex as inputs. We extracted
RoPS features from each range image, and performed
multi-view range image registration using the refer-
ence shape based algorithm. We then integrated the
range images corresponding to each reference shape,
producing a reconstructed complete 3D model. The
multi-view registration results and reconstructed 3D
models of these objects are shown in Fig. 7. These
results clearly demonstrate that our algorithm is capa-
ble of reconstructing 3D models by seamlessly merg-
ing multiple range images.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
102

5 CONCLUSIONS
In this paper, we presented a reference shape based al-
gorithm for multi-view range image registration. We
tested the performance of our algorithm on multiple
range images from either one object or multiple ob-
jects. Experimental results show that the proposed
algorithm can perform multi-view range image reg-
istration on mixed and unordered range images which
correspond to different objects. We also tested the
robustness of our algorithm with respect to varying
numbers of input range images. It is shown that the
proposed algorithm is more computationally efficient
compared to the state-of-the-art methods. We further
demonstrated the effectiveness of the proposed algo-
rithm by performing 3D modeling. Overall, the pro-
posed algorithm is accurate, efficient and robust.
REFERENCES
Alexiadis, D., Zarpalas, D., and Daras, P. (2013). Real-time,
full 3-D reconstruction of moving foreground objects
from multiple consumer depth cameras. IEEE Trans-
actions on Multimedia, 15(2):339–358.
Assfalg, J., Bertini, M., Bimbo, A., and Pala, P. (2007).
Content-based retrieval of 3-D objects using spin im-
age signatures. IEEE Transactions on Multimedia,
9(3):589–599.
Bariya, P., Novatnack, J., Schwartz, G., and Nishino, K.
(2012). 3D geometric scale variability in range im-
ages: Features and descriptors. International Journal
of Computer Vision, 99(2):232–255.
Besl, P. and McKay, N. (1992). A method for registration
of 3-D shapes. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 14(2):239–256.
Bouaziz, S., Tagliasacchi, A., and Pauly, M. (2013). Sparse
iterative closest point. Computer Graphics Forum
(Special Issue of Symposium on Geometry Process-
ing), 32(5):1–11.
Chen, Y. and Medioni, G. (1992). Object modelling by reg-
istration of multiple range images. Image and vision
computing, 10(3):145–155.
Curless, B. and Levoy, M. (1996). A volumetric method
for building complex models from range images. In
23rd Annual Conference on Computer Graphics and
Interactive Techniques, pages 303–312.
Dorai, C., Wang, G., Jain, A. K., and Mercer, C. (1998).
Registration and integration of multiple object views
for 3D model construction. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 20(1):83–89.
Guo, Y., Bennamoun, M., Sohel, F., Wan, J., and Lu, M.
(2013a). 3D free form object recognition using rota-
tional projection statistics. In IEEE 14th Workshop on
the Applications of Computer Vision, pages 1–8.
Guo, Y., Sohel, F., Bennamoun, M., Lu, M., and Wan, J.
(2013b). Rotational projection statistics for 3D local
surface description and object recognition. Interna-
tional Journal of Computer Vision, 105(1):63–86.
Guo, Y., Sohel, F., Bennamoun, M., Lu, M., and Wan, J.
(2013c). TriSI: A distinctive local surface descrip-
tor for 3D modeling and object recognition. In 8th
International Conference on Computer Graphics The-
ory and Applications, pages 86–93.
Huang, Q. and Pottmann, H. (2005). Automatic and robust
multi-view registration. Technical report, Tsinghua
University.
Huber, D. and Hebert, M. (2003). Fully automatic regis-
tration of multiple 3D data sets. Image and Vision
Computing, 21(7):637–650.
Johnson, A. E. and Bing Kang, S. (1999). Registration
and integration of textured 3D data. Image and Vision
Computing, 17(2):135–147.
Lei, Y., Bennamoun, M., Hayat, M., and Guo, Y. (2013).
An efficient 3D face recognition approach using local
geometrical signatures. Pattern Recognition.
Masuda, T. (2009). Log-polar height maps for multiple
range image registration. Computer Vision and Image
Understanding, 113(11):1158–1169.
Mian, A., Bennamoun, M., and Owens, R. (2006a).
Three-dimensional model-based object recognition
and segmentation in cluttered scenes. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
28(10):1584–1601.
Mian, A., Bennamoun, M., and Owens, R. A. (2006b). A
novel representation and feature matching algorithm
for automatic pairwise registration of range images.
International Journal of Computer Vision, 66(1):19–
40.
Rusinkiewicz, S., Hall-Holt, O., and Levoy, M. (2002).
Real-time 3D model acquisition. In ACM Transac-
tions on Graphics, volume 21, pages 438–446. ACM.
Salvi, J., Matabosch, C., Fofi, D., and Forest, J. (2007).
A review of recent range image registration methods
with accuracy evaluation. Image and Vision Comput-
ing, 25(5):578–596.
ter Haar, F. B. and Veltkamp, R. C. (2007). Automatic mul-
tiview quadruple alignment of unordered range scans.
In IEEE International Conference on Shape Modeling
and Applications, pages 137–146.
Tombari, F., Salti, S., and Di Stefano, L. (2010). Unique
signatures of histograms for local surface description.
In European Conference on Computer Vision, pages
356–369.
Williams, J. and Bennamoun, M. (2001). Simultaneous reg-
istration of multiple corresponding point sets. Com-
puter Vision and Image Understanding, 81(1):117–
142.
EfficientRegistrationofMultipleRangeImagesforFullyAutomatic3DModeling
103
