
Multiview Point Cloud Filtering for Spatiotemporal Consistency
Robert Skupin, Thilo Borgmann and Thomas Sikora
Communication Systems Group, Technische Universit¨at Berlin, Berlin, Germany
Keywords:
Point Cloud Filtering, Multiview Resampling, Spatiotemporal Consistency.
Abstract:
This work presents algorithms to resample and filter point cloud data reconstructed from multiple cameras
and multiple time instants. In an initial resampling stage, a voxel or a surface mesh based approach resamples
the point cloud data into a common sampling grid. Subsequently, the resampled data undergoes a filtering
stage based on clustering to remove artifacts and achieve spatiotemporal consistency across cameras and time
instants. The presented algorithms are evaluated in a view synthesis scenario. Results show that view synthesis
with enhanced depth maps as produced by the algorithms leads to less artifacts than synthesis with the original
source data.
1 INTRODUCTION
Stereoscopic video that allows for depth perception
through two view points is already a mass market
technology and means for acquisition, transport, stor-
age and presentation are broadly available. Auto-
stereoscopy is targeted towards a more immersive
viewing experience with glasses-free display tech-
nology and an increased freedom of viewer position
(Smolic et al., 2006). The necessary rich scene rep-
resentations consist of camera or camera views from
more than two view points. Out of this large data
set, only two suitable camera views are visible to a
spectator at a given time to achieve depth perception
(Dodgson, 2005). Transmitting the necessary amount
of camera views may challenge the available infras-
tructure, e.g. with respect to capacity. A solution may
be the transmission of a limited set of camera views
with their associated depth information, referred to as
depth maps, to allow synthesis of additional camera
views at the end device without sacrificing transmis-
sion capacity (Vetro et al., 2008).
However, the quality of synthesized views de-
pends on the quality of the provided depth informa-
tion, i.e. its accuracy and consistency, which may
be degraded, e.g through compression or estimation
errors (Merkle et al., 2009). In (Scharstein and
Szeliski, 2002) and (Seitz et al., 2006), the authors
give an extensive taxonomy and evaluation of tech-
niques for multiview reconstruction algorithms that
distinguishes global methods, e.g. graph-cuts based
optimization algorithms as in (Vogiatzis et al., 2005)
or (Starck and Hilton, 2005) and local methods such
as depth map fusion (Merrell et al., 2007). Camera
view point, image noise as well as occlusions, texture
characteristics, motion or other influences challenge
multiview reconstruction algorithms. As illustrated
in Fig. 1 on the widely used ballet data set (Zitnick
et al., 2004), estimated depth maps may suffer from
object boundary artifacts across camera view points
(a), movement artifacts at static areas over time (b) or
artifacts at revealed occlusions from edge view points
of the camera setup (c).
Another aspect that can make the representation
and processing of multiview data cumbersome is the
(a) (b)
(c)
Figure 1: Various types of depth map artifacts: (a) across
cameras, (b) over time, (c) caused by occlusions.
531
Skupin R., Borgmann T. and Sikora T..
Multiview Point Cloud Filtering for Spatiotemporal Consistency.
DOI: 10.5220/0004681805310538
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 531-538
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

C
1
Scene
C
2
Figure 2: Illustration of the sampling grid of two cameras
C
1
andC
2
capturing a scene and the perspective transforma-
tion of the sampling grids into each other.
distribution of samples across multiple camera sam-
pling grids. A camera sensor constitutes a discrete,
rectangular and uniform sampling grid. Using multi-
ple cameras to capture a common scene as illustrated
in Fig. 2, samples taken by a first camera C
1
can be
transformed to the sampling grid of a second camera
C
2
with a different camera view point and vice versa.
The resulting spatial distribution of transformed sam-
ples on the target camera sampling grid is typically
continuous and projectively distorted. Reconstruct-
ing a point cloud from camera sensor samples, the
individual 3D points are structured through a 3D pro-
jection of the 2D sampling grid of the camera. This
sampling grid in 3D space is thereby determined by
the camera position, orientation and properties, i.e.
the intrinsic and extrinsic camera parameters. Us-
ing multiple cameras for point cloud reconstruction,
the respective sampling grid projections are superim-
posed and the spatial distribution of 3D points is nei-
ther rectangular nor uniform. A representation that
conforms to a single sampling grid but preserves as
much of the captured information as possible simpli-
fies subsequent processing, e.g. filtering of the incon-
sistencies illustrated in Fig. 1.
We build our work on the algorithms presented
in (Belaifa et al., 2012) that resample and filter point
cloud data reconstructed by multiple cameras to cre-
ate a consistent representation across cameras. In
this work, we enhance the presented algorithms and
extend them to resample and filter multiview video
over time and across cameras. Furthermore, an objec-
tive evaluation scenario is presented in order to ob-
jectively evaluate the performance of the presented
algorithms. Therefore, the source camera views to-
gether with the enhanced depth maps are tested in a
view synthesis scenario against synthesis results of
the original source material.
Section 2 presents the algorithms while the eval-
uation procedure and results are given in section 3
followed by a short summary and conclusion in sec-
tion 4.
2 POINT CLOUD RESAMPLING
AND FILTERING
The presented algorithms operate in two consecutive
stages, i.e. resampling and filtering as illustrated in
Fig. 3. First, in the initial resampling stage, samples
of moving objects are removed from the source data
for temporal filtering and a color matching scheme is
applied. Two separate approaches for alignment of
3D points to a common 3D sampling grid are pre-
sented, i.e. either through sampling voxels in 3D
space or reconstructed surface meshes. Second, the
resampled data undergoes a filtering stage based on
clustering to remove artifacts by a weighting thresh-
old and achieve spatiotemporal consistency across
cameras and time instants. From the resampled and
filtered point clouds, enhanced depth maps can be
produced through projection to the target camera im-
age plane. The algorithms intend to preserve details
captured only by single cameras while filtering arti-
facts of the depth estimation. The following subsec-
tions describe the algorithms in detail.
2.1 Voxel and Mesh based Resampling
In the initial resampling stage, each sample at 2D
sampling point (u,v) taken from each cameraC
i
, with
i = 0 ... (n − 1) in a n camera data set, is projected
Weight threshold
Source data
Temporal Filtering
t
1..k
t
0
resampled
point cloud
point cloud per
camera
and
time instant
Color
Matching
Enhanced
depth view
Voxel or mesh
resampling
…
1. ResamplingInput 2. Filtering
Output
time instant
t
0
time instant
interpolated
point cloud
Clustering
Figure 3: Algorithm flow chart.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
532

voxel border
u
v
image plane
of C
ref
camera centre
of C
ref
C
i
P
Figure 4: Schematic of the voxel-based approach with a
sampling volume constituted by a C
ref
sampling grid pro-
jection.
to point (X,Y, Z) in 3D space by means of central pro-
jection with the appropriate camera parameters. The
third component Z, i.e. the depth component in 3D
space, is determined by a non-linear mapping of the
associated sample value in the corresponding depth
map.
In the voxel-based resampling approach, the com-
mon 3D sampling grid is established by projecting
the borders of the 2D sampling grid of a reference
camera C
ref
to 3D space as illustrated through dashed
lines in Fig. 4. The volume enclosed by the scene
depth range and the projected borders of a given 2D
sampling point (u, v) of C
ref
to 3D space constitutes
a sampling voxel. 3D points reconstructed from a
contributing cameraC
i
, exemplary annotated as P
C
i
in
the figure, that are located within the respective voxel
constitute the sampling set A(u,v) for each (u,v) of
C
ref
. This approach is referred to as voxel resampling
in the following sections.
A more complex method to resample the point
cloud data uses a generated 3D surface mesh for each
individual camera C
i
as illustrated as dashed lines in
Fig. 5. The surface mesh is generated by projecting all
samples of C
i
to 3D space and constructing triangles
across each pair of neighboring sample rows. The in-
tersection of the surface mesh with the projection of
each sampling position (u, v) of C
ref
is used as ba-
sis to linearly interpolate the depth value at the inter-
section and constitute the sampling set A(u,v). This
approach is referred to as mesh resampling in the fol-
lowing sections.
2.2 Color Discontinuities
When reconstructing a point cloud from multiple
cameras, depth discontinuities at object boundaries
tend to vary notably between camera view points.
Figure 6 provides an example of this observation,
with (a) depicting a point cloud reconstruction of a
foreground detail from C
ref
source data only and (b)
surface mesh
for C
i
image plane
of C
ref
u
v
camera centre
of C
ref
intersection
Figure 5: Schematic of the mesh-based approach. Sampling
points are generated from the intersection of the projected
reference sampling point and the 3D surface mesh of each
camera C
i
.
showing a point cloud reconstructed from all cameras
of the data set with a C
ref
camera view overlay and
noticeably dilated object boundaries. Apart from the
additive depth estimation error noise of all cameras,
the imprecision of estimated camera parameters leads
to minor translation and rotation of the reconstructed
point cloud per cameras with respect to each other.
With the basic assumption, that depth disconti-
nuities at object boundaries tend to coincide with
color discontinuities as in (Tao and Sawhney, 2000),
a threshold can be established to filter samples that
do not match color discontinuities of the C
ref
cam-
era view. Therefore, both resampling approaches use
a threshold m
c
on the L
1
distance between the RGB
vector of the currentC
i
sample and the corresponding
C
ref
sample to ensure correspondence of the two. The
effect of color matching is depicted in (c) of Fig. 6
showing the same reconstruction as (b) with active
color threshold m
c
.
2.3 Extension to the Temporal Domain
In (Belaifa et al., 2012) the authors consider samples
from multiple camera view points while the used data
set actually consists of sequences of video frames and
(a) (b) (c)
Figure 6: Effect of color threshold on depth discontinuities:
(a) point cloud reconstruction of C
ref
, (b) resampled point
cloud from all C
i
and overlay of the C
ref
camera view with-
out color threshold and (c) with color threshold.
MultiviewPointCloudFilteringforSpatiotemporalConsistency
533

thus contains additional information for point cloud
reconstruction and subsequent processing in the tem-
poral domain. Considering this domain allows filter-
ing of movement artifacts on static objects such as
the floor as shown in Fig. 1 (b). For this purpose,
creation of the sampling sets A(u,v) at the time in-
stant t
0
in the resampling stage relies on source data
from time instants t
0
...t
k
where k as the temporal fil-
tering depth. Samples belonging to objects that move
in the course of the additional k frames should not
be added to A(u,v). Therefore, a binary mask view
M
j
for source data of each camera C
i
of time instants
t
j
> t
0
is created and used in the resampling stage ac-
cording to the following procedure.
• Initialize M
j
to zero and apply Gaussian filter to
the camera view luma components L of C
i
at time
instants t
j−1
and t
j
.
• Set M
j
to one at sample positions where the dif-
ference between L
j−1
and L
j
exceeds a threshold.
If j > 1, additionally set M
j
to one at sample
positions where the difference between L
0
and L
j
exceeds a threshold.
• Compute a dense optical flow map between L
j
and
L
j−1
based on polynomial expansion according to
(Farneb¨ack, 2003). Set M
j
to one at sample posi-
tions with motion vectors that exceed a threshold.
• Dilate M
j
with a rectangular kernel.
• Samples of C
i
source data for which the corre-
sponding sample in M
j
is set to one are not con-
sidered in the subsequent resampling.
An example for the source data masked by M
j
and
a temporal filtering depth of k = 3 is given in Fig. 7.
A detail of the original camera view from a single
camera C
i
for time instants t
0
to t
3
is given from left
to right in the top row (a). Row (b) shows samples
of corresponding depth map of C
i
that subsequently
contribute to the resampling stage after M
j
is applied,
where the white areas at t
1
to t
3
correspond to active
areas of M
j
. The bottom row (c) shows the recon-
structed point cloud of all cameras at t
0
to t
3
which
jointly contribute to the resampling stage for t
0
. In
order to compensate removed samples of moving ob-
jects at t
1
to t
3
in the following filtering stage, the
weight of samples from each cameraC
i
at t
0
for which
the corresponding sample in M
j
is set to one is in-
creased accordingly.
2.4 Filtering Stage
In the subsequent filtering stage, the resampled source
data from multiple cameras C
i
and time instants t
i
is
t
0
t
1
t
2
t
3
(a)
(b)
(c)
Figure 7: Moving object removal for temporal filtering: (a)
camera view, (b) corresponding depth map with overlay of
mask M
j
in white, (c) reconstructed point cloud of all cam-
eras C
i
.
filtered. While merging the samples of the contribut-
ing cameras within A(u, v), the aim is to filter arti-
facts and preserve details. Our algorithm is based on
hierarchical group-average linkage clustering as de-
scribed in (Hastie et al., 2001) and regards all sam-
ples in A(u, v) as clusters with weight equal to 1 along
the depth coordinate axis. Iteratively, the two clos-
est samples within A(u,v) are merged by linearly in-
terpolating their depth values to the new depth Z
new
and agglomerating their weight. The position of the
merged sample along the horizontal and vertical di-
mension in 3D space correspond to the projection of
the C
ref
sampling grid position to Z
new
in 3D space.
For each sampling grid position (u,v) of C
ref
, the
clustering process stops when all samples in A(u,v)
have a distance to each other greater or equal than
a minimum cluster distance threshold m
d
. This end
condition ensures back- and foreground separation of
the given scene. The mapping between the sample
value of a depth map and the depth coordinate in 3D
space is not necessarily linear, e.g. to capture more
depth detail of objects closer to the camera. To ensure
equal preservation of details regardless of the object
depth in the scene, m
d
is given in terms of depth lev-
els rather than Euclidean distance in 3D space.
After the clustering process, a minimum cluster
weight threshold m
w
is applied to remove samples
with a weight less than m
w
from A(u,v), i.e. out-
lier samples that are spatially far from any other sam-
ples in A(u,v) and are thus not merged. As the size
of A(u, v) considerably varies over the sampling grid
depending on camera setup and the resampling ap-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
534

(a) (b) (c) (d) (e)
Figure 8: Exemplary results of the enhanced depth maps: (a) original depth map,(b) enhanced depth map using voxel re-
sampling, (c) mesh resampling, (d) and (e) with temporal filtering depth k = 2 using voxel resampling and mesh resampling,
respectively.
proach, m
w
is given as relative to sum of weights
within A(u,v). If none of the samples in A(u,v) sat-
isfy m
w
, only the sample with the largest weight is
kept.
3 EVALUATION
The presented algorithms are evaluated in a view syn-
thesis scenario on the 100 frames ballet and break-
dancers data set (Zitnick et al., 2004) based on the
assumption that depth maps with less inconsistencies
across cameras and over time lead to a higher quality
of synthesis results. As base line for the evaluation,
the original texture and depth maps of all available
cameras C
i
are used to synthesize camera views at all
camera view points.
Synthesis is carried out through projection of all
relevant samples of the data set into 3D space and
back to the target image plane of interest. At each
sampling position (u,v) of the target image plane, a
blending procedure of samples ensures decent image
quality while preserving artifacts that originate from
the depth maps. The quality of synthesis results com-
pared to the corresponding original camera views is
measured frame-wise in terms of PSNR and MSSIM
(Wang et al., 2004) with an 8× 8 rectangular window.
The same synthesis procedure is followed using
the original camera views but depth maps enhanced
by the algorithms presented in this work. The synthe-
sis results with enhanced depth maps are compared to
the respective original camera views likewise.
Enhanced depth maps of all cameras were pro-
duced for all frames of the data sets with a tempo-
ral filtering depth of k = {0,... ,2}. This range gives
an outlook on the effects of the proposed technique
on the view synthesis and limits the amount of addi-
tional data that has to be processed in the resampling
and subsequent filtering stage of the algorithms. A
color threshold of m
c
= 0.18 relative to the com-
bined maximum sample value of the three color chan-
nels and a minimum cluster distance of m
d
= 0.03
relative to the maximum depth map sample value is
evaluated. The minimum cluster weight m
w
is cho-
sen as 0.13 of the sum of weights in A(u, v) without
temporal filtering. This choice is motivated by the
amount of n cameras in the data set. A threshold m
w
slightly higher than 1/n is not satisfied by outliers that
stem from single cameras and remain disjoint during
clustering. As the number of samples to process in
the filtering stage grows with the temporal filtering
depth, so does the weight of outlier clusters after fil-
tering. Therefore, the threshold of removal of outliers
is increased to m
w
= 0.26 and m
w
= 0.34 for k = 1
and k = 2, respectively.
Across all experiments, the quality of the synthe-
sis results is above 32dB PSNR and an MSSIM of
0.86 on average. Figure 8 shows a detail of an origi-
nal depth map of the ballet sequence of the right-most
camera (a) and the corresponding enhanced depth
map as produced by the voxel resampling (b) and the
mesh resampling approach (c) without filtering in the
temporal domain. Exemplary results for a temporal
filtering depth of k = 2 are given for voxel resam-
pling in (d) of Fig. 8 and mesh resampling in (e). It
can be seen from the figure that the algorithms suc-
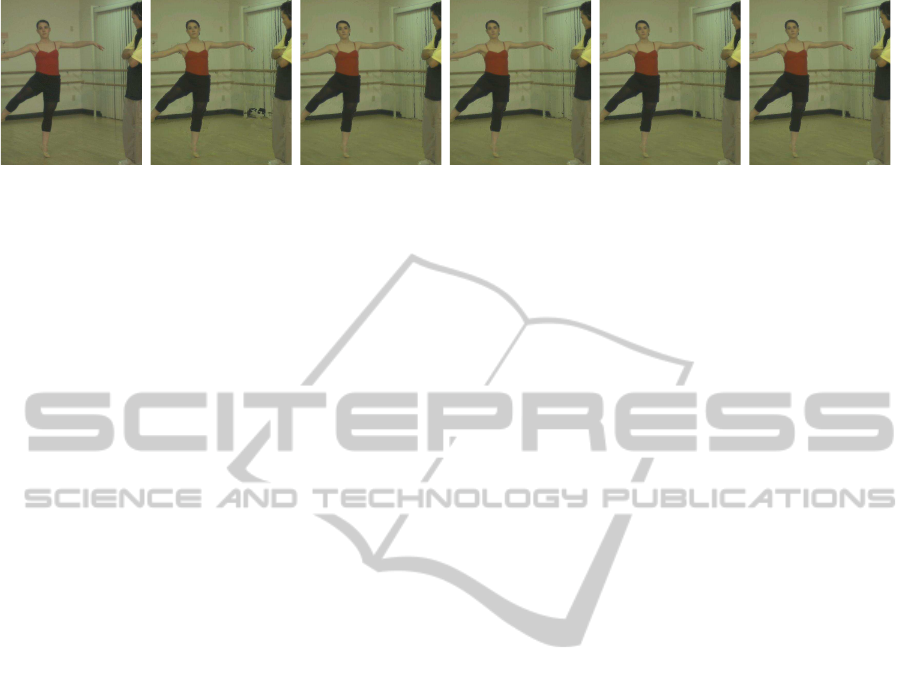
Figure 9: Exemplary results for filtering in the temporal do-
main.
MultiviewPointCloudFilteringforSpatiotemporalConsistency
535

cessfully reduce artifacts at object boundaries and re-
vealed occlusions. Figure 9 shows a detail of the same
four consecutive frames of the ballet sequence as in
Fig.1 (b) after applying the algorithm with voxel re-
sampling and a temporal filtering depth of k = 2 with
noticeably smoothed artifacts of the static areas.
The top plot in Fig. 10 reports the ∆PSNR of syn-
thesis results of the two algorithms with both data
sets compared to the synthesis results of the original
source data over the temporal filtering depth k and
averaged over all frames and all cameras while the
bottom plot reports the results in terms of ∆MSSIM.
Positive values report a quality improvement for the
algorithms.
It can be seen that the synthesis results based on
the enhanced depth maps achieve a ∆PSNR above
0.45dB for the ballet data set and a minimal positive
tendency with an increasing temporal filtering depth.
For the breakdancers data set that contains more mo-
tion only a smaller quality improvement is reported
and the results show a lower quality increase with in-
creasing temporal filtering depth. Although overall
MSSIM gains are minimal, they show a similar be-
0 1 2
0
0.2
0.4
0.6
0.8
∆ PSNR [dB]
Temporal Filtering Depth k
Ballet − Voxel
Ballet − Mesh
Breakdancers − Voxel
Breakdancers − Mesh
0 1 2
1
2
3
4
x 10
−3
∆ MSSIM
Temporal Filtering Depth k
Figure 10: Synthesis quality improvements for both data
sets over temporal filtering depth with presented algorithms
in PSNR and SSIM averaged over all cameras and frames.
havior and tendency as the PSNR measurements.
Figure 11 reports the results of the experiments
over camera index i without performing temporal fil-
tering and averaged over all frames. It can be noticed
that the best performing synthesis achieves well above
1dB PSNR gain for the ballet data set and MSSIM
measurements show a tendency similar to that of the
PSNR measurements. A noticeable drift of results can
be observed from the left-most to the right-most cam-
era for both tested data sets, which may be caused by
scene geometry and synthesis setup, i.e. depth map
artifacts may impair synthesis results to a varying ex-
tent.
While in general the synthesis results with en-
hanced depth maps of the ballet data set (little mo-
tion with strong back-/foreground separation) show
notable objectiveand visual improvements, the results
of the breakdancers data set (much motion with weak
back-/foregroundseparation) do so only to a small de-
gree.
Figure 12 gives a comparison of the original cam-
era view (a), the synthesis result with source data (b),
the synthesis results of voxel resampling (c) and mesh
0 1 2 3 4 5 6 7
−0.5
0
0.5
1
1.5
∆ PSNR [dB]
Camera Index i
Ballet − Voxel
Ballet − Mesh
Breakdancers − Voxel
Breakdancers − Mesh
0 1 2 3 4 5 6 7
−0.01
−0.005
0
0.005
0.01
0.015
∆ MSSIM
Camera Index i
Figure 11: Synthesis quality improvements for both data
sets over camera index i with presented algorithms in PSNR
and MSSIM averaged over all frames.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
536
(a) (b) (c) (d) (e) (f)
Figure 12: Exemplary results of the view synthesis: (a) original camera view, (b) synthesis with source data, (c) voxel
resampling, (d) mesh resampling, (d) and (e) temporal filtering depth of k = 2 for voxel resampling and mesh resampling,
respectively.
resampling (d) without temporal filtering, the respec-
tive synthesis results with a temporal filtering depth
k = 2 in (e) and (f). While effects in the temporal
domain are hard to notice from single frames, synthe-
sis artifacts related to depth map artifacts on object
boundaries and revealed occlusions can be noticed
in (b) which do not occur in (c) to (f). Overall, the
quality of synthesis results with enhanced depth maps
does not vary significantly with a negligible positive
margin for the voxel based approach and temporal fil-
tering.
4 SUMMARY AND
CONCLUSIONS
This work presents algorithms to resample and filter
point cloud data reconstructed from multiple cameras
and multiple time instants. In an initial resampling
stage a voxel and a surface mesh based approach are
presented to resample the point cloud data into a com-
mon sampling grid. Subsequently, the resampled data
undergoes a filtering stage based on clustering to re-
move artifacts of depth estimation and achieve spa-
tiotemporal consistency. The presented algorithms
are evaluated in a view synthesis scenario. Results
show that view synthesis with enhanced depth maps
as produced by the algorithms leads to less artifacts
than synthesis with the original source data. The dif-
ference in achieved quality between the voxel and the
surface mesh based approach is negligible and with
regard to the computational complexity of the surface
mesh reconstruction, the voxel based approach is the
desirable solution for resampling.
Filtering in the temporal domain shows slight syn-
thesis quality improvements when moving objects are
confined to a limited region of the scene as in the bal-
let data set. For data sets in which moving objects
cover larger areas such as in the breakdancer data set,
temporal filtering does not improve synthesis results
compared to filtering across cameras. The presented
motion masking excludes samples within a relatively
wide image area with respect to the actual moving ob-
ject. Therefore, depth map artifacts in the correspond-
ing areas are not interpolated in the filtering stage and
thus affect synthesis.
REFERENCES
Belaifa, O., Skupin, R., Kurutepe, E., and Sikora, T. (2012).
Resampling of Multiple Camera Point Cloud Data. In
Consumer Communications and Networking Confer-
ence (CCNC), 2012 IEEE, pages 15–19. IEEE.
Dodgson, N. A. (2005). Autostereoscopic 3D Displays.
Computer, 38(8):31–36.
Farneb¨ack, G. (2003). Two-Frame Motion Estimation
Based On Polynomial Expansion. In Image Analysis,
pages 363–370. Springer.
Hastie, T., Tibshirani, R., and Friedman, J. J. H. (2001). The
Elements of Statistical Learning, volume 1. Springer
New York.
Merkle, P., Morvan, Y., Smolic, A., et al. (2009). The
Effects of Multiview Depth Video Compression On
Multiview Rendering. Signal Processing: Image
Communication, 24(1-2):73–88.
Merrell, P., Akbarzadeh, A., Wang, L., Mordohai, P.,
Frahm, J.-M., Yang, R., Nister, D., and Pollefeys, M.
(2007). Real-Time Visibility-Based Fusion of Depth
Maps. Computer Vision, IEEE International Confer-
ence on, 0:1–8.
Scharstein, D. and Szeliski, R. (2002). A Taxonomy and
Evaluation of Dense Two-Frame Stereo Correspon-
dence Algorithms. International journal of computer
vision, 47(1):7–42.
Seitz, S., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A Comparison and Evaluation of
Multi-View Stereo Reconstruction Algorithms.
Smolic, A., Mueller, K., Merkle, P., Fehn, C., Kauff,
P., Eisert, P., and Wiegand, T. (2006). 3d Video
and Free Viewpoint Video-Technologies, Applica-
tions and Mpeg Standards. In Multimedia and Expo,
2006 IEEE International Conference on, pages 2161–
2164. IEEE.
Starck, J. and Hilton, A. (2005). Virtual View Synthesis of
People From Multiple View Video Sequences. Graph-
ical Models, 67(6):600–620.
MultiviewPointCloudFilteringforSpatiotemporalConsistency
537

Tao, H. and Sawhney, H. S. (2000). Global Matching Crite-
rion and Color Segmentation Based Stereo. In Appli-
cations of Computer Vision, 2000, Fifth IEEE Work-
shop on., pages 246–253. IEEE.
Vetro, A., Yea, S., and Smolic, A. (2008). Toward a 3D
Video Format for Auto-Stereoscopic Displays. In
Optical Engineering+ Applications, pages 70730F–
70730F. International Society for Optics and Photon-
ics.
Vogiatzis, G., Torr, P. H., and Cipolla, R. (2005). Multi-
View Stereo Via Volumetric Graph-Cuts. In Computer
Vision and Pattern Recognition, 2005. CVPR 2005.
IEEE Computer Society Conference on, volume 2,
pages 391–398. IEEE.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli,
E. P. (2004). Image Quality Assessment: From Error
Visibility to Structural Similarity. Image Processing,
IEEE Transactions on, 13(4):600–612.
Zitnick, C., Kang, S., Uyttendaele, M., Winder, S., and
Szeliski, R. (2004). High-Quality Video View Inter-
polation Using a Layered Representation. In ACM
Transactions on Graphics (TOG), volume 23, pages
600–608. ACM.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
538
