
Appearance-based Eye Control System by Manifold Learning
Ke Liang
1
, Youssef Chahir
1
, Mich
`
ele Molina
3
, Charles Tijus
1
and Franc¸ois Jouen
1
1
CHArt Laboratory, EPHE Paris, 4-14 rue Ferrus 75014 Paris, France
2
Computer Science Department, GREYC-UMR CNRS 6072, University of Caen, Caen, France
3
PALM Laboratory EA 4649, University of Caen, Caen, France
Keywords:
Appearance Eye Descriptor, Appearance-based Method, Manifold Learning, Spectral Clustering, Human-
computer Interaction.
Abstract:
Eye-movements are increasingly employed to study usability issues in HCI (Human-Computer Interacetion)
contexts. In this paper we introduce our appearance-based eye control system which utilizes 5 specific eye
movements, such as closed-eye movement and eye movements with gaze fixation at the positions (up, down,
right, left) for HCI applications. In order to measure these eye movements, we employ a fast appeance-based
gaze tracking method with manifold learning technique. First we propose to concatenate local eye appearance
Center-Symmetric Local Binary Pattern(CS-LBP) descriptor for each subregion of eye image to form an eye
appearance feature vector. The calibration phase is then introduced to construct a trainning samples by spectral
clustering. After that, Laplacian Eigenmaps will be applied to the trainning set and unseen input together to
get the structure of eye manifolds. Finally we can infer the eye movement of the new input by its distances
with the clusters in the trainning set. Experimental results demonstrate that our system with quick 4-points
calibration not only can reduce the run-time cost, but also provide another way to mesure eye movements
without mesuring gaze coordinates to a HCI application such as our eye control system.
1 INTRODUCTION
As gaze tracking technology improves in the last 30
years, gaze tracker offers a powerful tool for diverse
study fields, in particular eye movement analysis and
human-computer interaction (HCI), such as eye con-
trol system or eye-gaze communication system. Eye
control helps users with significant physical disabili-
ties to communicate, interact and to control computer
functions using their eyes (Jacob & Karn, 2003). Eye
movements can be measured and used to enable an in-
dividual actually to interact with an interface. For ex-
ample, users could position a cursor by simply look-
ing at where they want it to go, or click an icon by
gazing at it for a certain amount of time or by blink-
ing.
Nowadays most commercial gaze trackers use
feature-based method to estimate gaze coordinates,
which relies on video-based pupil detection and the
reflection of infra-red LEDs. In general, there are two
principal methods: 1) Pupil-Corneal Reflection(P-
CR) method (Morimoto et al., 2000)(Zhu and Ji,
2007), and 2) 3D model based method(Shih and Liu,
2004)(Wang et al., 2005). IR light and extraction of
pupil and iris are important for these feature-based
methods, and the calibration of cameras and geome-
try data of system is also required.
Appearance-based methods do not explicitly ex-
tract features like the feature-based method, but rather
use the cropped eye images as input with the intention
of mapping these directly to gaze coordinates(Hansen
and Ji, 2010). The advantage is that they do not re-
quire calibration of cameras and geometry data like
feature-based method. Moreover, they can be less ex-
pensive in materials than feature-based method since
they don’t have to work on the same quality im-
ages like feature-based method does. But they still
need a relatively high number of calibration points
to get accurate precision. Different works can be
seen in multilayer networks(Baluja and Pomerleau,
1994)(Stiefelhagen et al., 1997)(XU et al., 1998),
or Gaussian process(Nguyen et al., 2009)(Williams
et al., 2006), or manifold learning(Martinez et al.,
2012)(Tan et al., 2002). Williams et al. (Williams
et al., 2006) introduces the sparse, semi-supervised
Gaussian Process (S
3
GP) to learn mappings from
semi-supervised training sets. Fukuda et al. (Fukuda
et al., 2011) propose a gaze-estimation method that
uses both image processing and geometrical process-
ing to reduce various kinds of noise in low-resolution
148
Liang K., Chahir Y., Molina M., Tijus C. and Jouen F..
Appearance-based Eye Control System by Manifold Learning.
DOI: 10.5220/0004682601480155
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 148-155
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

eye-images and thereby achieve relatively high accu-
racy of gaze estimation.
Manifold learning is widely applied to solve many
problems in computer vision, in pattern recognition
etc (Lee and Kriegman, 2005)(Rahimi et al., 2005)
(Weinberger and Saul, 2006)(Zhang et al., 2004).
Manifold learning, often also referred to as non-
linear dimensionality reduction, is also one of the
approaches applied in appearance-based gaze track-
ing(Tan et al., 2002), and one of the reason to ap-
ply manifold learning techiques is to reduce com-
putational costs. Manifold learnig means the pro-
cess of estimating a low-dimensional structure which
underlies a collection of high-dimensional data, also
preserves characteristic properties of the set of high-
dimensional data. Here we are interested in the
case where the mainifold lies in a high dimensional
space R
D
, but will be homeomorphic with a low
dimensional space R
d
(d < D). Laplacian eigen-
maps(Belkin and Niyogi, 2001)(Belkin and Niyogi,
2003) most faithfully preserves proximity relations of
a high-dimensional non-linear data set in the low di-
mensional space, by using spectral graph technique.
Here our emphasis is on creating a pratical, real-
time eye control system with our appearance-based
method. Our contributions are:
• A subregion CS-LBP concatenated histogram is
used as eye appearance feature which not only re-
duce the dimension of raw images, but also can be
robust against the changes in illumination.
• During the calibration phase, we use spectral clus-
tering to build on-line the subject’s eye move-
ments model by selecting and trainning a limited
number of eye feature samples.
• To infer its movement for an unseen eye input,
Laplacian Eigenmaps is introduced to analyse the
similarities and the manifold structure for the
training samples and the unseen input.
• The system requires only a remote webcam and
without IR light.
The rest of the paper is organized as follows. Sec-
tion2 describes the eye manifold learning to the pro-
posed eye feature. Section 3 presents a global view of
our eye control system. Section 4 shows the experi-
mental setup and results. Finally section 5 concludes
the paper.
2 EYE APPEARANCE
MANIFOLD LEARNING
2.1 Eye Appearance Descriptor
Let an eye image I be a two-dimensional M by N
array of intensity values, and it may also be consid-
ered as a vector of dimension M × N. The proposed
gaze tracker captures left and right eyes together and
combines them into one image. Our eye image of
size 160 by 40 becomes a vector of dimension 6400.
Appearance-based gaze tracking methods mostly rely
on the eye images as input. Extracting eye appearance
descriptor not only helps to reduce the dimension of
eye images, but also preserves the feature and varia-
tion of eye movemnts.
There exist a number of eye appearance feautre
extraction methods for gaze tracking system, like
multi-level HOG (Martinez et al., 2012), eigeneyes
by PCA (Noris et al., 2008), and subregions feature
vector (Lu et al., 2011). Lu et al. have proven the effi-
ciency of using 15D subregions feature vector in (Lu
et al., 2011). To compute this feature vector, the eye
image I
i
is divided into N
0
subregions of size w × h.
Let S
j
denote the sum of pixel intensities in j−th sub-
region, then feature vector X
i
of the image I
i
is repre-
sented by
X
i
=
[S
1
,S
2
,...,S
j
]
∑
S
j
j ∈ N
0
(1)
Here we introduce our subregion methods with
Center-Symmetric Local Binary Pattern (CS-LBP) to
calculate low dimensional feature vector for raw eye
image content. Local Binary Pattern (LBP) opera-
tor has been highly successful for various computer
vision problems such as face recognition, texture
classification etc. The histogram of the binary pat-
terns computed over a region is used for feature vec-
tor. The operator describes each pixel by the relative
graylevels of its neighboring pixels. If the graylevel
of the neighboring pixel is higher or equal, the value
is set to one, otherwise to zero.
We calculate the CS-LBP(Heikkil
¨
a et al., 2009)
histogram, which is a new texture feature based on the
LBP operator, for each subregion in Fig.1(a) and con-
catenate them to form the eye appearance feature vec-
tor. Instead of describing a center pixel by comparing
its neighboring pixels with it in LBP, CS-LBP com-
pares the center-symmetric pairs of pixels in Fig.1(b).
The CS-LBP value of a center pixel in position
(x,y) is calculated as follows:
CS − LBP
R,N,T
(x,y) =
N/2−1
∑
i=0
s(n
i
− n
i+(N/2)
)
Appearance-basedEyeControlSystembyManifoldLearning
149

(a) (b)
Figure 1: a) 40 subregions of an eye image sample b) CS-
LBP for a neighborhood of eight pixels.
where s(t) =
1 t > T
0 else
, n
i
and n
i+(N/2)
are the
gray values of center-symmetric pairs of pixels of N
equally spaced pixels on a circle with radius R , and
the threshold T is a small value. From this equation,
the value of CS-LBP may be any integer from 0 to
2
N/2
− 1, and the histogram dimension will be 2
N/2
.
CS-LBP is fast to compute and its histogram has been
proven to be robust against the changes in illumina-
tion as a texture descriptor(Heikkil
¨
a et al., 2009).
2.2 Spectral Clustering
Graph Laplacians are the main tools in spectral graph
theory. Here we focus on two kinds of graph Lapla-
cian:
• Unnormalized graph Laplacian.
L
un
= D −W
where W is the symmetric weight matrix with pos-
itive entries for edge weights between vertices. If
w
i j
= 0, then vertices i and j are not connected.
D is the degree matrix: d
ii
=
∑
n
j=1
w
i j
and d
i j
= 0
∀i 6= j.
• Normalized graph Laplacian.
L
sym
= D
−1/2
L
un
D
1/2
= I − D
−1/2
W D
1/2
L
normalized
= D
−1
L
un
= I − D
−1
W = I − L
rw
Where L
sym
is a symmetric matrix, and L
rw
is
closely related to a random walk. There are 3
properties:
1) λ is an eigenvalue of L
rw
with eigenvector v if
and only if λ and v solve the generalized eigen-
problem Lv = λDv.
2) L
rw
is positive semi-definite with the first en-
genvalue λ
1
= 1 and the constant one vector 1
the corresponding eigenvector.
3) All eigenvectors are real and it holds that: 1 =
|λ
1
| ≥ |λ
2
| ≥ ... ≥ |λ
n
| .
(a) (b)
(c) (d)
Figure 2: (a) Eye capture for 8 visual patterns in the screen
(b) 4-points calibration (up-right, up-left, down-left, down-
right) (c) Eye manifolds in the phase of 8-points calibration
(d) Eye manifolds in the phase of 4-points calibration (up-
right, up-left, down-left, down-right).
Laplacian eigenmaps use spectral graph tech-
nique to compute the low-dimensional representation
of a high-dimensional non-linear data set, and they
most faithfully preserves proximity relations, map-
ping nearby input patterns to nearby outputs. The
algorithm of Laplacian eigenmaps has a similar struc-
ture as LLE. First, one constructs the symmetric undi-
rected graph G = (V, E), whose vertices represent in-
put patterns and whose edges indicate neighborhood
relations (in either direction). Second, one assigns
positive weights W
i j
to the edges of this graph; typ-
ically, the values of the weights are either chosen
to be constant, say W
i j
= 1/k, or a heat kernel, as
W
i j
= exp(−
||x
i
−x
j
||
2
2l
2
) where l is a scale parameter.
In the third step of the algorithm, one obtains the em-
beddings ψ
i
∈ R
m
by minimizing the cost function:
E
L
=
∑
i j
W
i j
||ψ
i
− ψ
j
||
2
p
D
ii
D
j j
This cost function encourages nearby input patterns to
be mapped to nearby outputs, with “nearness” mea-
sured by the weight matrix W . To compute the em-
beddings, we find the eigenvalues 0 = λ
1
≤ λ
2
≤
... ≤ λ
n
and eigenvectors v
1
,...,v
n
of the generalized
eigenproblem: Lv = λDv. The embeddings Ψ : ψ
i
→
(v
1
(i),...,v
m
(i)).
Spectral clustering refers to a class of techniques
which rely on the eigen-structure of a similarity ma-
trix to partition points into disjoint clusters with
points in the same cluster having high similarity and
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
150

points in different clusters having low similarity. We
follow the works of (Shi and Malik, 2000). Their al-
gorithm of spectral clustering computes the normal-
ized graph Laplacian L
rw
, and its first k generalized
eigenvectors v
1
,...,v
k
as embeddings, and then utilise
k-means to cluster the points.
From the section 2.1 we’ve introduced our subre-
gion CS-LBP methods to extract the eye appearance
feature descriptor. Here we’d like to at first obtain eye
manifold distribution by using Laplacian Eigenmaps,
and then we apply the normalized spectral clustering.
The Fig.2 (a,b) shows eye samples of the subject’s
eye movements when the subject follows the visual
pattern(green points) shown in the screen. The Fig.2
(c,d) demonstrate the distribution of embeddings in
the subspace. (c) gives the distribution of a dataset
of 240 points which contains only the eye samples on
the 8 points in the screen , while (d) contains only
120 eye samples from the 4 points in the corner(up
right, up left, down left, down right). For a given
number C of visual patterns, generally we can get l
clusters U = {U
1
,U
2
,...,U
l
} associated with weights
W = {w
1
,w2,...,w
l
} by the size of cluster, where
C ≤ l < n.
3 EYE CONTROL SYSTEM
In this section we introduce our eye control system
which aims to recognize 5 specific eye movements,
such as closed-eye movement and eye movements
with gaze fixation at the up-right, up-left, down-right
and down-left of the screen. The four eye gaze move-
ments are used to select events and the closed-eye
movements can be used as control signal like a ’click’
of the mouse. The system has two components: cal-
ibration phase and prediction phase which are shown
in Fig. 3.
3.1 Calibration Phase
As an appearance-based approach, the system needs
an eye-gaze mapping calibration which can be consid-
ered as the collection and analysis phase of labelled
and unlabelled eye data. This on-line calibration pro-
cedure aims to provide a model of the subject’s eye
movement in a given region (for example, the screen
of laptop etc) with limited number of eye samples.
The system utilizes 4 points (up-right, up-left,
down-right and down-left of the screen) as calibra-
tion points (Fig. 2b). In order to achieve an efficient
calibration, we apply spectral clustering (Sec. 2.2)
to all the unlabelled eye samples and get the clusters
of their manifolds during the calibration procedure.
Figure 3: Flowchart of system.
A labelled data set then can be built by selecting the
center samples of each clusters, and can be used as
training model for a new inputs. The manifold struc-
ture of labelled data set might be shown in Fig. 2d.
3.2 Prediction Phase
The prediction phase executes a classification task for
new eye feature inputs. In order to map feature vec-
tor X ∈ R
M
0
to gaze region output Y ∈ R, which rep-
resents a set of categories, we have a trainning set
D = {(X
i
,Y
i
)|i = 1,2,...,n}, where X
i
denotes an in-
put vector of dimension M
0
and Y
i
denotes the number
of category, n is the number of observations. Given
this trainning set D, we wish to make predictions for
the new inputs X
0
which is not in the training set.We
apply Laplacian Eigenmaps to the trainning set and
the new input together.
We propose a 24-points visual pattern scenario
Fig. 4(a) in a given region which size is 754
× 519 pixels. With the screen in which pixel is
0.225mm/pixel, the real size is about 17cm × 11.6cm.
The subject is asked to gaze each point one by one.
Fig. 4(b,c,d) shows the distribution of 3D eye man-
ifolds projected by laplacien eigenmaps. Notice that
there are some degrees of similarity between the man-
ifold surface and position plane of the 24 points. From
Appearance-basedEyeControlSystembyManifoldLearning
151

(a) (b) (c) (d)
Figure 4: Projection of 990 eye gaze samples on 24 points in the screen (a) by Laplacian Eigenmaps. b) c) 3D eye manifolds
e
i
= {v
1
i
,v
2
i
,v
3
i
} d) 3D eye manifolds e
i
= {λ
1
i
v
1
i
,λ
2
i
v
2
i
,λ
3
i
v
3
i
}.
(a) (b) (c) (d) (e) (f)
Figure 5: Projection of the trainning samples plus new eye input of different movements by by Laplacian Eigenmaps (l=700).
(Red point represents the new input data, black points represents the trainning samples).
their manifold structure we can infer the eye move-
ment of the new input by the distance of similarity
with the training datas given a threshold T
corner
.
For an input like eye blinkings or closed-eye
movements, which are very different with the train-
ning samples, their manifold structure is completely
changed as shown in Fig. 5f. The scale of trainning
set becomes more smaller than the scales in the other
case such as Fig. 5 (a,b,c,d), while the eye blink-
ing image is added into the trainning set. Laplacian
Eigenmaps helps to give prominence to the differ-
ence. We take advantage of this difference in scale
to recognize eye blinkings by the distance of similar-
ity with the training datas given a threshold T
blinks
.
4 EXPERIMENTATION
This section evaluates our proposed methods pre-
sented in the previous sections. Our experimenta-
tion is tested on MacBook Pro 8,1 with Intel Core
i5-2415M CPU. Microsoft LifeCam HD-5000 is used
for image acquisition of gaze tracking system in the
experiments. The USB color webcam captures 30
frames per second with a resolution of 640 × 480.
4.1 Eye Detection and Tracking
The distance between the subject and the camera is
about 40 - 70 cm. To the entire RGB image cap-
tured from camera, we firstly use a face components
detection model, which is based on Active Shape
Model(T.F.Cootes et al., 1995), to localize the eye
regions and the corners. We introduce then Lukas-
Kanade method to track the corner points in the fol-
lowing frames. Finally we combine the left and right
eye regions to the eye appearance pattern, which is
converted to grayscale and used as the input data for
gaze estimation process. The process of eye detection
and tracking is shown in Fig. 6. The eye appearance
pattern is an image of 160×40. Fig. 7 shows eye sam-
ples of five subjects. As introduced in section 2.1, the
pattern is divided into 40 subregions and we calculate
CS-LBP histogram for each subregion. The size of
the feature vector is 640.
4.2 Eye Manifolds
In this section we evaluate eye manifold structure for
different persons, and in different conditions.
Taking eye samples of five subjects such as Fig. 7
who follow the 16 points outside-round the screen, we
can see that the distributions of their eye manifolds
are relatively similar (Fig. 8), despite the difference
between their eyes’ form. If taking eye samples at
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
152

Figure 6: Eye localization and tracking
Figure 7: Five eye samples in different light condition. The
subjects have head-free movement and the distance between
the subject and the camera is about 40 - 70 cm.
(a) (b) (c) (d)
Figure 8: Each line of figures represents the eye mani-
fold distribution for each subject mentioned above. α =
0.8 l = 100 a)b) 750 eye samples c)d) 120 eye samples.
four points on the corners, the distibution shows the
different clusters distinctly such as Fig. 8(c)(d). The
curve in Fig. 13 shows the exponential growth of time
cost for spectral clustering with the growth number of
eye samples.
Here we analyse the structure of eye manifolds
projected by laplacien eigenmaps in 2 different condi-
tions as the illumination changes and the head move-
ment. We also compare our subregion CS-LBP de-
scriptor with the original subregion method, which
calculates the feature vector as the equation(1) shown
in Sec. 2.1.
• Illumination changes
Here the subject follows the 4 points in the screen
(Fig. 2b) 2 times within 20 seconds, while the
indoor-illumination changes as Fig. 9. We extract
the eye appearance descriptor from the 500 eye
images by our proposed CS-LBP descriptor, alos
by the original subregion descriptor as a compar-
ative method. From the observations (Fig. 10)
of projection by Laplacian Eigenmaps, CS-LBP
descriptor gives the translation of eye movement
stucture for the changes of illumination, while
subregion descriptor is totally disturbed by the
changes illumination.
• Head movements
Different humans vary widely in the tendency to
move the head for a given amplitude of gaze shift.
We are interested in the difference of eye manifold
structure between a limited natural head move-
ment as Fig. 11 and the movement keeping the
head still. Here the subject is asked to follow a
point which moves along the edge line of screen.
The size of screen is 33cm × 22cm. The distance
between the subject and the screen is about 60 cm.
From the result as shown in Fig. 12, we can see
that both the descriptors can keep the structure of
eye movement while moving the head slightly, but
the scale of structure changes.
4.3 Calibration Phase and Prediction
Phase
The calibration phase will vary depending on appli-
cation. Generally the conventional calibration proce-
dure makes each calibration point appear in the screen
for one second, and the subject is expected to follow
it. The 30Hz camera can capture 120 images for 4
senconds. So in this case we can get 120 eye samples
for unlabelled data set.
But for our eye-control application, the calibration
phase can be done more quickly et efficiently, because
the position of the four calibration points are just at
the corner of the screen. The more efficient way to
calibrate is just that let the subject look at the corner
by himself and the camera captures the images during
Appearance-basedEyeControlSystembyManifoldLearning
153
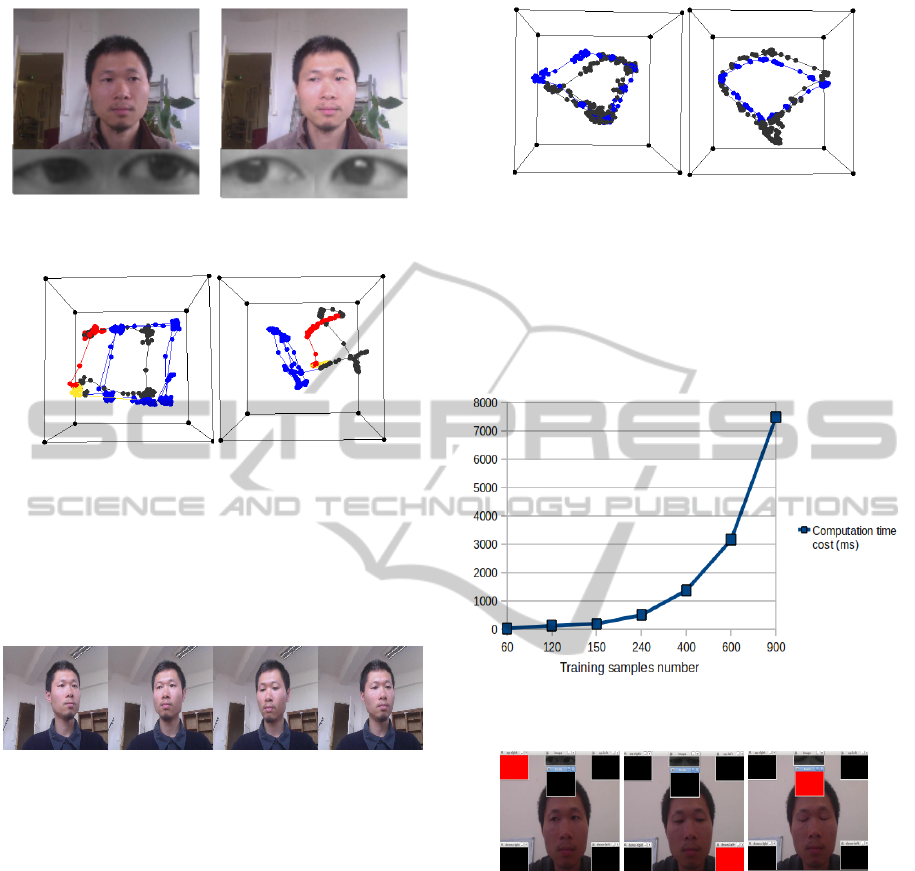
Figure 9: Demonstration of the changes of illumination by
2 sample frames.
(a) (b)
Figure 10: Comparison of using CS-LBP and subregion
methods as eye descriptor in the condition of changes of
illumination (500 eye samples). The different colors show
the changes of illumination. a) CS − LBP
1,8,0.01
fea-
ture vector projected in 3D by Laplacian Eigenmaps(l =
10000). b) original subregion feature vector by Laplacian
Eigenmaps(l = 700).
Figure 11: Demonstration of the free-head movement while
the suject follows the points in the screen. The distance
between the subject and the screen is about 60 cm.
the time. It might take one or two seconds and we can
get 30 or 60 unlabelled eye samples.
In our experimentation, the prediction phase uti-
lize a trainning set of 12 samples (3 samples for each
corner). In order to predict an unseen input, we com-
pute the 3D manifold for the set of 13 eye features (12
trainning samples + 1 new input) by Laplacian Eigen-
maps and compare the scale of structure and their dis-
tances as shown in Fig 5. The thresholds T
blinks
and
T
corners
take empirical values as 2 and 900. The ex-
perimentation movie in the attachment shows that the
system can predict the eye movements for four direc-
tions, at the same time, it is also able to recognize the
closed-eye movements as well as eye blinkings(Fig.
14).
Fig. 13 demonstrates the consuming time of
Laplacian Eigenmaps for different numbers of train-
ning samples. The consuming time for 60 eye sam-
(a) (b)
Figure 12: Comparison of using CS-LBP and subregion
methods as eye descriptor for the head movement (520 eye
samples). Blue points represent the stucture with fixed head
and black points represent the structure with slight head
movements. a) CS − LBP
1,8,0.01
feature vector
projected in 3D by Laplacian Eigenmaps(l = 9000). b) orig-
inal subregion feature vector by Laplacian Eigenmaps(l =
900).
Figure 13: Consuming time of spectral clustering to differ-
ent numbers of eye samples.
Figure 14: Demonstration of eye control system interface.
Red labels present the result of prediction: up-left, down-
right and closed eye movement.
ples is about 41 ms, and 137ms for 120 eye samples.
So with 12 trainning samples provides a possiblity for
the real-time application.
5 CONCLUSIONS
We presented our appearance-based eye movements
tracker and the application for an eye control system.
We used subregion CS-LBP concatenated histogram
as eye appearance feature, which not only can reduce
the dimensionality of eye images, but also can be ro-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
154

bust againt the changes in illumination. Addition-
ally, we introduced Laplacian Eigenmaps and spec-
tral clustering which help to learn about the “mani-
fold structure” of eye movement and give an efficient
calibration phase. With limited number of trainning
samples, the system can provides a quick prediction
even when the number of calibration samples is lim-
ited. The efficiency and reasonable accuracy can help
to provide a real-time application.
ACKNOWLEDGEMENTS
This work is supported by company UBIQUIET, and
the French National Technology Research Agency
(ANRT).
REFERENCES
Baluja, S. and Pomerleau, D. (1994). Non-intrusive gaze
tracking using artificial neural networks. Advances in
Neural Information Processing Systems.
Belkin, M. and Niyogi, P. (2001). Laplacian eigenmaps
and spectral techniques for embedding and clustering.
NIPS, 15(6):1373–1396.
Belkin, M. and Niyogi, P. (2003). Laplacian eigenmaps
for dimensionality reduction and data representation.
Neural Comput., 15(6):1373–1396.
Fukuda, T., Morimoto, K., and Yamana, H. (2011). Model-
based eye-tracking method for low-resolution eye-
images. 2nd Workshop on Eye Gaze in Intelligent Hu-
man Machine Interaction.
Hansen, D. W. and Ji, Q. (2010). In the eye of the beholder:
A survey of models for eyes and gaze. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
32(3):478–500.
Heikkil
¨
a, M., Pietik
¨
ainen, M., and Schmid, C. (2009). De-
scription of interest regions with local binary patterns.
Pattern Recogn., 42(3):425–436.
Lee, K.-C. and Kriegman, D. (2005). Online learning
of probabilistic appearance manifolds for video-based
recognition and tracking. In Proceedings of the 2005
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (CVPR’05) - Volume 1
- Volume 01, CVPR ’05, pages 852–859, Washington,
DC, USA. IEEE Computer Society.
Lu, F., Sugano, Y., Okabe, T., and Sato, Y. (2011). Infer-
ring human gaze from appearance via adaptive linear
regression. In Metaxas, D. N., Quan, L., Sanfeliu,
A., and Gool, L. J. V., editors, ICCV, pages 153–160.
IEEE.
Martinez, F., Carbonne, A., and Pissaloux, E. (2012). Gaze
estimation using local features and non-linear regres-
sion. ICIP(International Conference on Image Pro-
cessing).
Morimoto, C. H., Koons, D., Amir, A., and Flickner, M.
(2000). Pupil detection and tracking using multiple
light sources. Image and Vision Computing, pages
331–335.
Nguyen, B. L., Chahir, Y., and Jouen, F. (2009). Eye gaze
tracking. RIVF ’09.
Noris, B., Benmachiche, K., and Billard, A. (2008).
Calibration-free eye gaze direction detection with
gaussian processes. Proceedings of the International
Conference on Computer Vision Theory and Applica-
tion.
Rahimi, A., Recht, B., and Darrell, T. (2005). Learning
appearance manifolds from video. In Proceedings
of the 2005 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition (CVPR’05)
- Volume 1 - Volume 01, CVPR ’05, pages 868–875,
Washington, DC, USA. IEEE Computer Society.
Shi, J. and Malik, J. (2000). Normalized cuts and image
segmentation. IEEE Transactions on Pattern Analysis
and Machine Intelligence.
Shih, S.-W. and Liu, J. (2004). A novel approach to 3d gaze
tracking using stereo cameras. IEEE Trans. Systems,
Man, and Cybernetics.
Stiefelhagen, R., Yang, J., and Waibel, A. (1997). Track-
ing eyes and monitoring eye gaze. Proc. Workshop
Perceptual User Interfaces.
Tan, K. H., Kriegman, D. J., and Ahuja, N. (2002).
Appearance-based eye gaze estimation. Proc. Sixth
IEEE Workshop Application of Computer Vision ’02.
T.F.Cootes, C.J.Taylor, D.H.Cooper, and J.Graham (1995).
Active shape models– their training and application.
Computer vision and image understanding, 61(1):38–
59.
Wang, J.-G., Sung, E., et al. (2005). Estimating the eye
gaze from one eye. Computer Vision and Image Un-
derstanding.
Weinberger, K. Q. and Saul, L. K. (2006). Unsupervised
learning of image manifolds by semidefinite program-
ming. Int. J. Comput. Vision, 70(1):77–90.
Williams, O., Blake, A., and Cipolla, R. (2006). Sparse and
semi-supervised visual mapping with the s3p. Proc.
IEEE CS Conf. Computer Vision and Pattern Recog-
nition.
XU, L.-Q., Machin, D., and Sheppard, P. (1998). A
novel approach to real-time non-intrusive gaze find-
ing. Proc. British Machine Vision Conference.
Zhang, J., Li, S. Z., and Wang, J. (2004). Manifold learning
and applications in recognition. In in Intelligent Mul-
timedia Processing with Soft Computing, pages 281–
300. Springer-Verlag.
Zhu, Z. and Ji, Q. (2007). Novel eye gaze tracking tech-
niques under natural head movement. IEEE TRANS-
ACTIONS on biomedical engineering.
Appearance-basedEyeControlSystembyManifoldLearning
155
