
Remote Execution vs. Simplification for Mobile Real-time Computer
Vision
Philipp Hasper, Nils Petersen and Didier Stricker
German Research Center for Artificial Intelligence (DFKI), Kaiserslautern, Germany
Keywords:
Remote Execution, Offloading, Mobile Computing, Computer Vision, Mobile Augmented Reality.
Abstract:
Mobile implementations of computationally complex algorithms are often prohibitive due to performance
constraints. There are two possible solutions for this: (1) adopting a faster but less powerful approach which
results in a loss of accuracy or robustness. (2) using remote data processing which suffers from limited band-
width and communication latencies and is difficult to implement in real-time interactive applications.
Using the example of a mobile Augmented Reality application, we investigate those two approaches and com-
pare them in terms of performance. We examine different workload balances ranging from extensive remote
execution to pure onboard processing. The performance behavior is systematically analyzed under different
network qualities and device capabilities. We found that even with a fast network connection, optimizing for
maximum offload (thin-client configuration) is at a disadvantage compared to splitting the workload between
remote system and client. Compared to remote execution, a simplified onboard algorithm is only preferable if
the classification data set is below a certain size.
1 INTRODUCTION
As long as the performance gap between stationary
and mobile devices persists, there will always be the
problem that algorithms that run in real-time on sta-
tionary systems still overburden mobile devices. Fur-
thermore, computing consumes energy which is one
of the three major constraints of mobile devices: 1)
small size, 2) limited energy and 3) the need of stay-
ing mobile. Hence, reducing mobile computational
load is important.
To accomplish this goal, one could fall back on a
remote system (server) which is accessible by mobile
clients who can use this secondary source of compu-
tational power. This offloading is also denoted by the
term “Remote Execution”.
Unlike offloading of one-time tasks like finding a
route for navigation, a web-search or a virus scan, re-
mote execution of smaller but frequent tasks suffers
from a disproportion of network overhead and com-
putational load: The more frequent a task has to be
performed, the less time is affordable for the com-
munication layer. This is crucial in real-time com-
puter vision, for example in Augmented Reality (AR):
To allow seamless superimposition of a live camera
stream with virtual information, visual object recog-
nition and tracking have to be performed with a high
frequency to allow interactive frame rates. Hence, a
short transmission time is vital for remote execution
of a mobile Augmented Reality system.
While an AR application with remote execu-
tion can take advantage of a powerful classification
scheme only limited by the remote system’s capabil-
ities, a mobile implementation running entirely on-
board is subject to tight performance restrictions as
explained before. To make pure onboard computer vi-
sion possible for mobile devices, one often has to sim-
plify the object classification which results in a loss of
accuracy. This strategy for overcoming performance
restrictions is called “Simplification”.
Paper Structure. We will briefly discuss several
ways to enhance computational power such as remote
execution. Then the example use case - an Aug-
mented Reality manual - is introduced. After taking
a look on related work in AR and remote execution,
we discuss how to realize our example application for
mobile devices. We implement one version with a re-
mote execution possibility and one onboard version
using the simplification strategy. We then compare
several execution modes of this smartphone applica-
tion ranging from extensive remote execution to pure
onboard processing.
Main Contribution. We systematically evaluate
the performance behavior of remote execution in
156
Hasper P., Petersen N. and Stricker D..
Remote Execution vs. Simplification for Mobile Real-time Computer Vision.
DOI: 10.5220/0004683801560161
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 156-161
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the context of real-time image processing on mo-
bile devices by means of an AR manual. We ex-
amine remote execution in comparison to algorithm
simplification and suggest it for smartphones and
smartphone-based head-mounted displays (HMDs)
such as Google Glass both being tied to performance
and energy constraints.
1.1 Taxonomy of Performance
Augmentation
To enhance a system’s performance one could either
develop better hardware (called hardware augmenta-
tion) or change the software design (software aug-
mentation) (Abolfazli et al., 2012). Please note that
in this case the term “augmentation” does not relate to
the concept of Augmented Reality but to approaches
used to enhance computational power (see Figure 1).
Hardware
Software
autonomous
server-based
Fidelity Adaption
Resource Awareness
Remote Execution
Remote Storage
Figure 1: Excerpt from the taxonomy of performance aug-
mentation. Adapted from (Abolfazli et al., 2012).
Fidelity Adaption, i.e. reducing the level of detail
when a lower fidelity is also sufficient, and Resource
Awareness, i.e. using the cheapest resource only just
able to provide the needed functionality
1
, run entirely
onboard. Remote Execution and Remote Storage are
based on the use of a supplemental remote system to
enhance the performance.
1.2 The Example Use Case
Whether remote execution improves the processing
speed depends on the actual application and the ex-
ecution context (executing mobile device, network
quality, etc.). In this paper we examine mobile
real-time computer vision with a prohibitively time-
consuming processing pipeline. The example that
we use is an Augmented Reality system which has
an extensive image classification approach to provide
context-aware step-by-step workflow assistance (Pe-
tersen and Stricker, 2012; Petersen et al., 2013).
The idea of these so-called AR manuals that guide
through a procedure by displaying instructions in the
user’s field of view is quite old (Caudell and Mizell,
1992). However, those manuals are still not widely
1
Like using the cheap, inaccurate phone cell localization
for a weather forecast service and expensive, accurate GPS
for navigation.
used due to their work-intensive authoring process
and the poor dissemination of suitable hardware (e.g.
head-mounted displays).
The authors of (Petersen and Stricker, 2012) ex-
plain, how the first problem can be solved by auto-
matic derivation of scene classifiers and instructions
from a single reference video.
The second problem can be addressed by using
mobile devices like smartphones and tablets for the
presentation layer. Since the system’s vision-based
approach is computationally demanding, adopting it
for such devices is not an easy task. We implement
a simplified version of their system and compare its
runtime behavior to a second implementation with re-
mote execution. From this comparison we draw con-
clusions about the suitability of remote execution for
mobile real-time computer vision.
2 RELATED WORK
Since mobile devices like smartphones and tablets
continuously replace stationary systems, more and
more applications have to be adopted to those plat-
forms regardless of their computational complexity.
Consequently, multiple mobile applications of com-
puter vision have been introduced in the past.
Reducing the mobile computational load by re-
mote execution to achieve a processing speed ade-
quate for such applications is not a new strategy:
(Chun and Maniatis, 2009) distinguish different sub-
classes of this approach like Primary Functionality
Outsourcing, i.e. retaining simple components on the
client and offloading computationally complex ones
or Background Augmentation, i.e. offloading of a
huge one-time task. With focus on image process-
ing, (Wagner and Schmalstieg, 2003) differentiate be-
tween several client/server interaction types like a thin
client, offloading of pose estimation or offloading of
both pose estimation and classification.
Early work in mobile AR with remote execution
includes (Regenbrecht and Specht, 2000; Gausemeier
et al., 2003), both using the client solely as image
source (thin client) and performing all processing
steps on the server. With the improvement of mo-
bile hardware it became feasible to involve the client
in the computation to reduce network load and overall
processing time. The client in the system of (Gamme-
ter et al., 2010) uses object tracking to minimize the
number of requests to the object recognition server.
(Kumar et al., 2012) propose a client performing both
image tracking and feature extraction before sending
a request but they don’t target interactive frame rates.
RemoteExecutionvs.SimplificationforMobileReal-timeComputerVision
157

Camera Classification
Display
Gray Low-pass Descriptor
Mobile
Remote
Mobile
Analysis
Figure 2: Illustration of the processing pipeline and its three possible handovers (gray, low-pass, descriptor) for offloading
computation to a remote server. The client then displays the visual instruction as a result.
Several frameworks have been proposed for en-
hancing mobile implementations by remote execu-
tion. CloneCloud (Chun et al., 2011) enables of-
floading by virtualization of the smartphone’s oper-
ating system on a server. The client starts offloading
by transmitting its complete processor state onto the
remote system and receives the state resulting from
the computations performed by the server. This en-
ables switching between onboard and remote execu-
tion at any particular point in time. In contrast to
CloneCloud, µCloud (March et al., 2011) uses soft-
ware decomposition. Viewing the whole application
as a graph of black box components every node is
weighted with its consumed time obtained during a
previous run-time analysis. This graph is then split
between client and server. However, in their proof-of-
concept implementation they used the mobile client
simply as an image source, computing all other steps
exclusively in the cloud.
3 MOBILE IMPLEMENTATION
The reference system “AR Handbook” (Petersen and
Stricker, 2012) uses a nearest neighbor classifier
based on Dominant Orientation Templates (DOT)
(Hinterstoisser et al., 2010) for scene recognition.
Since this technique is computationally demanding
when using a large dataset, a mobile implementation
is not trivial. We try out the following two strategies
and evaluate them against each other in Section 4.
3.1 Remote Execution
The entire pipeline for which we will realize remote
execution is displayed in Figure 2. To classify the
camera input with respect to the previously learned
references, we derive its DOT query descriptor (which
we denote “descriptor”). The already mentioned
heavy-load classification algorithm is executed on a
remote system which is accessible via an UDP-based
protocol. The last module before offloading (called
handover) is variable: Remote execution can start af-
ter the gray conversion, the low-pass or the descrip-
tor computation. The result - scene ID and the rough
camera pose - is sent back to the client which then
displays the corresponding instruction. Currently, in-
structions are shown as static pictures called annota-
tions which are saved on the client’s file system.
Additionally, compression can be enabled for ev-
ery handover: JPEG for both gray and low-pass and
run-length encoding for the descriptor. So altogether
the system provides six possible ways for subdividing
the pipeline between client and remote system.
One additional trait of remote execution of inter-
active tasks is the need to compensate for commu-
nication latencies. The strategy used for this is a)
extrapolating the old state with a simplified scheme
until the next valid result arrives and b) updating the
received result with the extrapolated data since it is
already outdated (see Figure 3).
t1
t1
t2 t3
t1
x
y
(a) No latency compensation
t1
t1
t2 t3
t1
(b) Latency compensation
Figure 3: Offloading of live image processing with and
without latency compensation. The dotted line represents
the client’s prediction of the annotation’s displacement.
We use a KLT optical flow tracker (Lucas and
Kanade, 1981; Shi and Tomasi, 1994) to track the
camera movements. This data is used to extrapolate
the annotation’s old position and to update received
results under the assumption of a static scene. Al-
though this is not always suitable for scene change de-
tection it can cope with changes in position which al-
lows to update the annotation’s position. This means
that scene changes are still subject to latency but the
annotation position is not. Additionally, complete
failure of tracking is an indicator for a scene change.
3.2 Simplification
Simplification means using an alternative algorithm
yielding faster results to the account of accuracy.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
158

We substitute the original DOT-based approach with
FAST+BRIEF (Rosten and Drummond, 2006; Calon-
der et al., 2010) and classify via Hamming distances.
This choice is appropriate since this approach is much
faster while having somewhat similar characteristics
(e.g. no rotation and scale invariance).
It is important to notice that a remote
FAST+BRIEF pipeline (e.g. splitting the pipeline at
keypoint level) is also possible but would have the
disadvantages of remote execution and simplification
combined: A client/server infrastructure is required
and we discard the original algorithm (which also
requires recomputation of the template database).
4 EVALUATION
To examine when remote execution yields a benefit
for our application in comparison to simplification,
we measure time consumption with respect to differ-
ent handovers and varying device and network qual-
ities. First, we determine the best configuration for
remote execution (Section 4.2) and then compare it to
simplification (Section 4.3).
4.1 Setup
To have a controlled experiment setup, the tested de-
vices were mounted onto a tripod facing a computer
monitor displaying a scene to classify (Figure 4). We
used a set of still images as scenes.
(a) Evaluation setup (b) Running application
Figure 4: Illustration of synthetic evaluation setup and run-
ning application.
We used a Samsung Galaxy S2 (SGS2) represent-
ing the class of faster mobile devices and a Nexus One
(NX1) for the class of slower ones. The WLAN con-
nection between client and server allowed a connec-
tion with around 40 Mbit/s and we measured a data
rate of around 0,3 Mbit/s for the mobile broadband
(HSDPA). When not stated otherwise, the server re-
ceived a 320x240 image and used 40 reference tem-
plates - one template per scene. The FAST+BRIEF
references used in the simplification trials were lim-
ited to the best 50 keypoints each. The stated execu-
tion time is the time between the start of the scene
classification and the arrival of the result averaged
over a three to five minute run.
4.2 Determining the Optimal Handover
To figure out which workload balance yields the best
performance, we compare all six possible handovers
(gray, low-pass and descriptor each uncompressed
and compressed). While the client’s computational
load rises with a late handover, the network load de-
creases: with our configuration, the descriptor has
only 1/49 of the gray image’s pixels.
The effect of compression varies depending on the
visual content, but in our test cases we observed a data
reduction by the factor 5 for handover gray, factor 6
for handover low-pass (both lossy JPEG) and factor
3 for handover descriptor (lossless run-length encod-
ing) compared to the respective uncompressed case.
The performance of the SGS2 in WLAN (Figure
5(a)) slightly increases with a late handover (descrip-
tor) and benefits from compression. This behavior is
more distinct with the NX1 (Figure 5(b)). This is sur-
prising since one would assume that the higher work-
load and the additional compression would be disad-
vantageous for the slow device. However, the slower
network interface seems to benefit sufficiently from
this data reduction to compensate for the increased
CPU load. Choosing the low-pass as handover has no
advantage, since the mobile computational load rises
while the network load only slightly decreases
2
. The
benefit of a late handover with compression is even
more evident when using mobile broadband (Figure
6).
To satisfy the real-time demand, we chose UDP
which means that lost datagrams are not sent again.
Since the uncompressed gray image and the uncom-
pressed blurred image have to be divided into many
packets, the probability of one of those getting lost is
very high leaving the server with an incomplete im-
age. This occurred quite often when performing re-
mote execution with the Nexus One via mobile broad-
band. Hence, we exclude those measurements in Fig-
ure 6(b) and conclude that compression also decreases
the probability of datagram incompleteness.
Figure 7 illustrates the individual shares of the
thin-client configuration (gray) and the late handover
(descriptor), both compressed. It shows that a late
handover comes with a higher computational load
for the client but reduces communication load on the
other hand. This client configuration is called “non-
2
The smoothing kernel does not justify subsampling.
The slightly higher JPEG compression rate of smoothed im-
ages does indeed have a small impact when using mobile
broadband but is negligible when using WLAN.
RemoteExecutionvs.SimplificationforMobileReal-timeComputerVision
159

Gray Low-pass Descriptor
0
50
100
150
200
250
compressed uncompressed
Handover
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(a) Galaxy S2 - WLAN
Gray Low-pass Descriptor
0
50
100
150
200
250
compressed uncompressed
Handover
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(b) Nexus One - WLAN
Figure 5: All six possible handovers, tested with two mobile
devices using WLAN. Slight advantage of compression in
all cases. A late handover turns out to be the best choice.
Gray Low-pass Descriptor
0
200
400
600
800
1000
1200
compressed uncompressed
Handover
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(a) Galaxy S2 - mobile
Gray Low-pass Descriptor
0
200
400
600
800
1000
1200
compressed uncompressed
Handover
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(b) Nexus One - mobile
Figure 6: All six possible handovers, tested with two mo-
bile devices using mobile broadband. Clear advantage of
compression. A late handover (descriptor) turns out to be
the best choice.
trivial client” as opposed to a thin client and is partic-
ularly useful in mobile broadband.
4.3 Comparison of Remote Execution
and Simplification
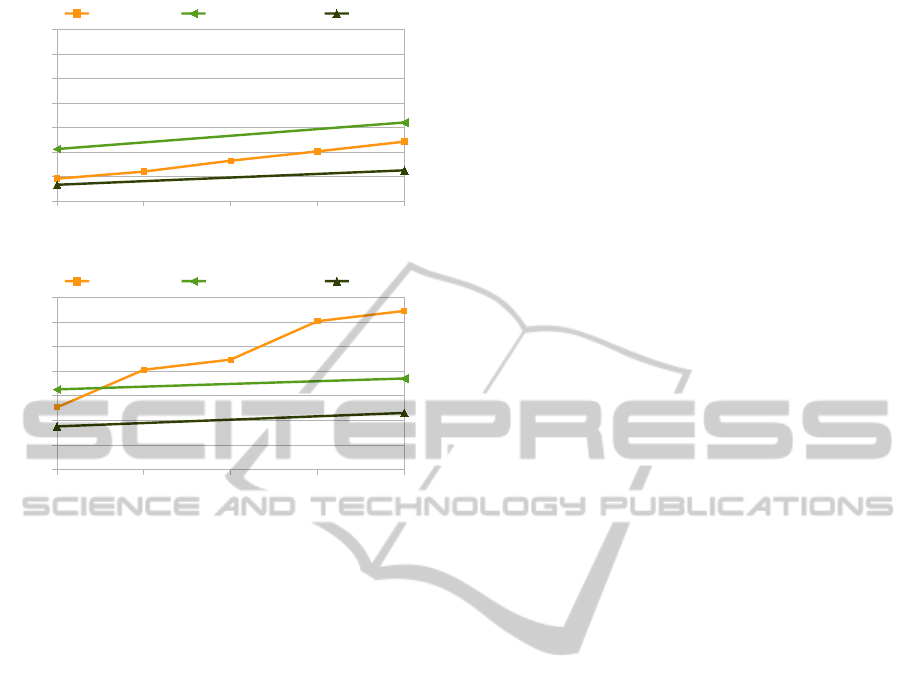
Figure 8 illustrates the difference between simplifi-
cation and remote execution. Remote execution was
done with a late handover (compressed descriptor)
since the previous experiments showed that this is the
best choice. The measurements indicate that remote
execution via WLAN is advantageous over running a
simplified classification onboard.
Remote execution in mobile broadband becomes
profitable when the template set exceeds a certain
limit. This break-even point occurs very soon for the
NX1 (less than 10 templates). For the SGS2, this will
only occur with a quite large data set (roughly around
100 templates).
5 CONCLUSIONS
Our analysis of remote execution in the context of mo-
Galaxy S2 Nexus One Galaxy S2 Nexus One
compressed gray compressed descriptor
0
50
100
150
200
250
Communication Server Client
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(a) WLAN
Galaxy S2 Nexus One Galaxy S2 Nexus One
compressed gray compressed descriptor
0
100
200
300
400
Communication Server Client
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
1300
(b) Mobile broadband
Figure 7: Breakdown of thin client (offloading the gray
image) and late handover (offloading the descriptor), both
compressed. A higher mobile computational load comes
with a decreased communication overhead which is espe-
cially advantageous when using mobile broadband.
bile computer vision showed that offloading complex
computations can indeed result in a higher processing
speed. Reducing the network overhead increases this
effect, which means that a simple thin-client config-
uration is typically not the best configuration. In our
specific application, splitting the pipeline at a rather
late point in time yields the highest performance in-
crease.
Thus, we propose remote execution with non-
trivial clients as an alternative to simplification when
adopting computationally complex programs to mo-
bile devices. This also has the advantage that already
existing template databases can still be used and do
not have to be recomputed for the simplified algo-
rithm. Moreover, the remote system’s database and
even its implementation can easily be changed with-
out the user having to update the application.
Since remote execution requires a mechanism to
compensate for communication latencies, this compo-
nent can increase the processing speed even further:
In many cases it is feasible to reduce the offloading
rate (in our case: limit the scene classification to ev-
ery 30 frames) and extrapolate the result in between.
Our findings are not restricted to computer vision
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
160
1 10 20 30 40
0
100
200
300
400
500
600
700
Simplification Mobile broadband WLAN
#Templates
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(a) Galaxy S2
1 10 20 30 40
0
100
200
300
400
500
600
700
Simplification Mobile broadband WLAN
#Templates
E
x
e
c
u
t
i
o
n
t
i
m
e
[
m
s
]
(b) Nexus One
Figure 8: Comparison of simplification (orange) and remote
execution with compressed descriptors (green tones). Re-
mote execution turns out to be particularly useful for slow
devices and beats simplification in WLAN. Remote execu-
tion is preferable in mobile broadband if the amount of ref-
erence templates exceeds a certain size.
and we suggest investigating remote execution with
non-trivial clients for other interactive processes, e.g.
offloading of in-game rendering for mobile devices.
Additionally, fast mobile processing is not always the
major goal - conserving battery power may also be
important. Remote execution might be useful to lower
the energy consumption. Further work is required to
investigate under which circumstances data transfer
and remote execution is more energy-efficient than
onboard computation.
ACKNOWLEDGEMENTS
This work was performed in the context of the
Software-Cluster projects EMERGENT and SINN-
ODIUM (www.software-cluster.org). It was funded
by the German BMBF under grant no. 01IC10S01.
REFERENCES
Abolfazli, S., Sanaei, Z., and Gani, A. (2012). Mobile
Cloud Computing: A Review on Smartphone Aug-
mentation Approaches. In CISCO.
Calonder, M., Lepetit, V., Strecha, C., and Fua, P. (2010).
Brief: Binary robust independent elementary features.
In ECCV.
Caudell, T. and Mizell, D. (1992). Augmented reality: an
application of heads-up display technology to manual
manufacturing processes. In HICSS.
Chun, B.-G., Ihm, S., Maniatis, P., Naik, M., and Patti, A.
(2011). CloneCloud: elastic execution between mo-
bile device and cloud. In EuroSys.
Chun, B.-G. and Maniatis, P. (2009). Augmented smart-
phone applications through clone cloud execution. In
HotOS.
Gammeter, S., Gassmann, A., Bossard, L., Quack, T., and
Van Gool, L. (2010). Server-side object recognition
and client-side object tracking for mobile augmented
reality. In CVPRW.
Gausemeier, J., Fruend, J., Matysczok, C., Bruederlin, B.,
and Beier, D. (2003). Development of a real time im-
age based object recognition method for mobile AR-
devices. In AFRIGRAPH.
Hinterstoisser, S., Lepetit, V., Ilic, S., Fua, P., and Navab, N.
(2010). Dominant orientation templates for real-time
detection of texture-less objects. In CVPR.
Kumar, S. S., Sun, M., and Savarese, S. (2012). Mobile ob-
ject detection through client-server based vote trans-
fer. In CVPR.
Lucas, B. D. and Kanade, T. (1981). An Iterative Image
Registration Technique with an Application to Stereo
Vision. In IJCAI.
March, V., Gu, Y., Leonardi, E., Goh, G., Kirchberg, M.,
and Lee, B. S. (2011). µCloud: Towards a New
Paradigm of Rich Mobile Applications. Procedia
Computer Science, 5:618–624.
Petersen, N., Pagani, A., and Stricker, D. (2013). Real-
time Modeling and Tracking Manual Workflows from
First-Person Vision. In ISMAR.
Petersen, N. and Stricker, D. (2012). Learning Task Struc-
ture from Video Examples for Workflow Tracking and
Authoring. In ISMAR.
Regenbrecht, H. and Specht, R. (2000). A mobile Passive
Augmented Reality Device - mPARD. In ISAR.
Rosten, E. and Drummond, T. (2006). Machine Learning
for High-Speed Corner Detection. In ECCV.
Shi, J. and Tomasi, C. (1994). Good features to track. In
CVPR.
Wagner, D. and Schmalstieg, D. (2003). First steps towards
handheld augmented reality. In ISWC.
RemoteExecutionvs.SimplificationforMobileReal-timeComputerVision
161
