
Energy based Descriptors and their Application for Car Detection
Radovan Fusek, Eduard Sojka, Karel Mozd
ˇ
re
ˇ
n and Milan
ˇ
Surkala
Technical University of Ostrava, FEECS, Department of Computer Science
17. listopadu 15, 708 33 Ostrava-Poruba, Czech Republic
Keywords:
Object Detection, Image Features, Recognition.
Abstract:
In this paper, we propose a novel technique for object description. The proposed method is based on inves-
tigation of energy distribution (in the image) that describes the properties of objects. The energy distribution
is encoded into a vector of features and the vector is then used as an input for the SVM classifier. Generally,
the technique can be used for detecting arbitrary objects. In this paper, however, we demonstrate the robust-
ness of the proposed descriptors for solving the problem of car detection. Compared with the state-of-the-art
descriptors (e.g. HOG, Haar-like features), the proposed approach achieved better results, especially from the
viewpoint of dimensionality of the feature vector; the proposed approach is able to successfully describe the
objects of interest with a relatively small set of numbers without the use of methods for the reduction of feature
vector.
1 INTRODUCTION
In the feature-based detectors, the selection of rele-
vant features that are able to reliably describe the ob-
jects of interest is a key point. In the recent years,
the object detectors that are based on the edge anal-
ysis that provide the valuable information about the
objects of interest have been used in many detection
tasks. In this area, the Histograms of Oriented Gradi-
ents (HOG) (Dalal and Triggs, 2005) are considered
as the state-of-the-art method. In HOG, a sliding win-
dow is used for recognition. In the process of ob-
taining HOG descriptors, the window is divided into
small connected cells. The histograms of gradients
are calculated for each cell. It is desirable to normal-
ize the histograms across a large block of image. As a
result, a vector of values is computed for each position
of window. This vector is then used for recognition,
e.g. by the Support Vector Machine (SVM) classi-
fier (Boser et al., 1992). The HOG descriptors are
very useful in many detection tasks. Dalal and Triggs
(Dalal and Triggs, 2005) proposed the human detec-
tion algorithm based on the HOG descriptors and a
linear SVM classifier. Zhu at al. (Zhu et al., 2006)
presented the nearly real-time human detector using
the cascade of rejectors with the HOG features. F.
Suard at al. (Suard et al., 2006) proposed the method
for pedestrian detection using the HOG descriptors
with the SVM classifier. Boosting HOG features for
the vehicle detection in airborne videos are presented
in (Cao et al., 2011).
In general, the methods that describe the edges by
making use of their orientations, gradient magnitudes,
positions, or length suffer from a high dimensionality
of feature vectors. Furthermore, the training and clas-
sification phase can be slowed down by this drawback
(a big number of training samples are required). The
images that are affected by rain, noise, lack of light,
misty and cloudy weather are frequent in the outdoor
applications. These images cause a great difficulty
in obtaining relevant features for the object descrip-
tion without the use of image filtering. The mentioned
problems created a motivation for developing new de-
scriptors. The preliminary versions of the presented
method were used for face detection in (Fusek et al.,
2013a), and for pedestrian detection in (Fusek et al.,
2013b).
In essence, the method was inspired by the fea-
tures that are based on HOG. We divide the image
inside the sliding window into regions, and within
the regions we define the sources of energy. By the
transfer of energy, we will mean the transfer of heat.
After the temperature transfer inside the sliding win-
dow, we investigate the movement of thermal energy
from the sources. The values that we calculate are
used for composing the feature vector of sliding win-
dow and the vector is then used as an input for the
SVM classifier. In contrast with the HOG descriptors,
the proposed method captures the object information
by the energy distribution in object areas instead of
492
Fusek R., Sojka E., Mozd
ˇ
re
ˇ
n K. and Šurkala M..
Energy based Descriptors and their Application for Car Detection.
DOI: 10.5220/0004685804920499
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 492-499
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the distribution of gradient magnitudes and directions.
Using the proposed method, we are able to describe
the object areas that are useful for recognition. The
first advantage is that the feature vectors of relatively
small dimensions are sufficient for successful recog-
nition. The next advantage is a very good resistance
to the noise. The filtering step is directly included in
the calculation of proposed approach. We will show
the robustness of the presented method for solving the
problem of car detection.
2 RELATED WORKS
The vehicle detection systems have been very use-
ful in the recent years. Especially nowadays in the
cities, the increasing number of vehicles brings a ma-
jor problem. The car detection systems can be impor-
tant, especially for drivers who are looking for vacant
spaces in the parking lots, for traffic analysis, for in-
telligent scheduling, and so on.
The information about the presence of vehi-
cles can be provided by the intrusive (magnetome-
ters, piezoelectric cables, micro-loop probes) and
non-intrusive sensors (microwave radar, laser radar)
(Mimbela et al., 2007). On the other hand, the
camera-based system that is able to provide very valu-
able information about the situation can be used and
the object detection methods that were proposed in
the last years (based on the image information) can
be used for vehicle detection.
For instance, Viola and Jones (Viola and Jones,
2001; Viola and Jones, 2002) proposed the very pop-
ular object detector. Haar-like features, integral im-
ages, and AdaBoost algorithm were used in their de-
tection framework. Several improvements of this de-
tection framework exist. The extension of the feature
set of their method has been presented by Lienhart
(Lienhart and Maydt, 2002). The improvement of the
weak classifiers combined with Real Adaboost for the
fast multi-view face detection system has been pre-
sented by Wu at al. (Wu et al., 2004). The tree struc-
ture for the construction of detector using the Vec-
tor Boosting algorithm has been presented by Huang
at al. (Huang et al., 2007). The method for detect-
ing multi-view cars has been presented by Zheng and
Liang (Zheng and Liang, 2009). The authors pro-
posed a novel set of image strip features for car de-
tection. Their strip features are calculated using the
integral image. Combined with the RealBoost frame-
work, the authors reported good performance. Never-
theless, the authors mentioned that the strip features
discard some statistical information compared with
the more complex descriptors such as HOG (Dalal
and Triggs, 2005). The trainable object detector for
detecting faces and cars at any size, location and pose
was presented by Schneiderman and Kanade (Schnei-
derman and Kanade, 2004). Their classifier is based
on the statistics of localized parts that represent vari-
ous local properties. Papageorgiou and Poggio (Papa-
georgiou and Poggio, 2000) described the object de-
tector for face, people and cars using Haar wavelets
with the support vector machine.
Detectors that are focused on detecting the cars
in parking lot are also very useful. Several methods
aimed at detecting the cars in parking lot have been
presented. Three-layer Bayesian hierarchical frame-
work for the parking lot occupancy problem was pre-
sented in (Huang and Wang, 2010). The system for
parking lot vehicle detection based on the fuzzy c-
means clustering classifier was reported in (Ichihashi
et al., 2010). The detection system consisting of
shadow removal, lens distortion correction, and park-
ing space extraction was presented in (Fabian, 2008).
In this paper, we also focus on detecting the cars in
parking lot, nevertheless, we use the classical sliding
window detection approach, therefore, for compari-
son, we use the classical image features (e.g. HOG,
Haar-like features) that are usually used in the sliding
window methods.
3 PROPOSED METHOD
For determining the proposed descriptors that are
based on distribution of energy (temperature), we use
the sliding window (similarly as in HOG); the win-
dow is divided into a chosen number of areas (e.g.
squares) called blocks (Fig. 2). For the image in-
side the sliding window, the distribution of tempera-
ture can be solved by making use of physical laws.
We suppose that the image is a plate that is cre-
ated from a material with a certain thermal conduc-
tivity. The value of conductivity depends on the local
size of the gradient of brightness or colour function
(the higher is the gradient size, the lower is the con-
ductivity). Inside each block, a source of temperature
is defined through which the thermal energy can flow
into the image; we use the gravity centers of blocks as
the positions of sources. The method that we propose
is based on determining the distribution of tempera-
ture in the image inside the sliding window after the
temperature transfer, which can be performed during
a chosen time. At the time t = 0, the temperature of
the plate is zero. At the same time (t = 0), the source
of heat with a constant temperature is attached to the
gravity centers of all blocks in one position of slid-
ing window. From the time t = 0, the temperature of
EnergybasedDescriptorsandtheirApplicationforCarDetection
493
sliding window
block
2
block
n
block
3
I
1t
μ
I
2t
μ
I
3t
μ
I
4t
μ
I
5t
μ
I
6t
μ
I
7t
μ
I
n
μ
feature vector of sliding window
...
... ...
...
block
1
I
1t
μ
I
2t
μ
I
3t
μ
I
4t
μ
I
5t
μ
I
6t
μ
I
6t
μ
I
7t
μ
block
feature vector of block
I
1t
μ
I
2t
μ
I
3t
μ
I
4t
μ
I
5t
μ
I
6t
μ
I
7t
μ
source
block
1
block
2
+
+
block
n
...
Figure 2: The vector of features.
block
source
cell
1
cell
2
cell
3
cell
4
cell
8
cell
5
cell
6
cell
7
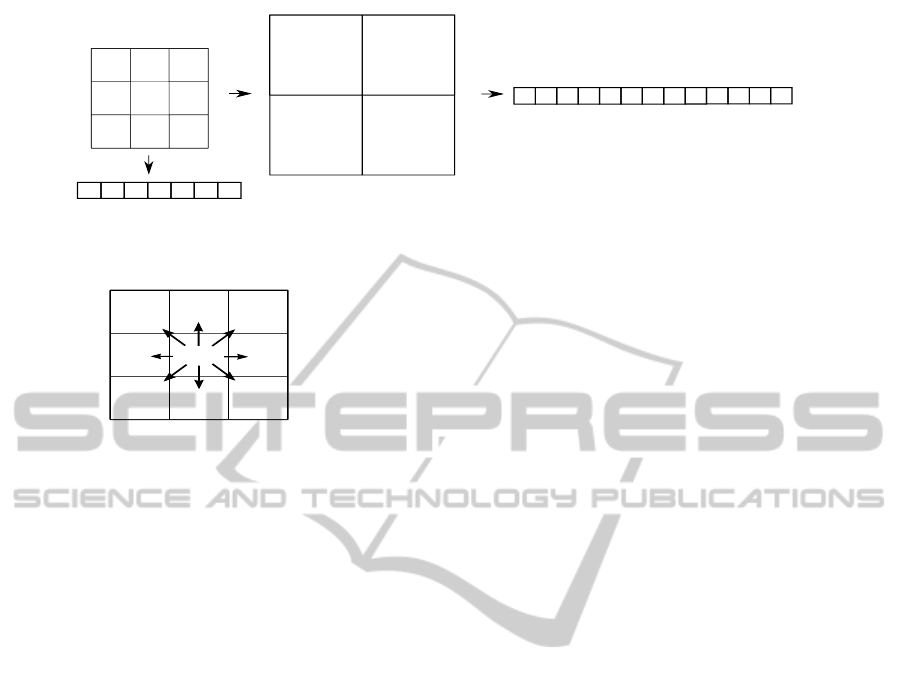
Figure 1: The block divided into cells. The source of tem-
perature is placed to the gravity center of block. In this
particular case, by appropriately placing of cells, we inves-
tigate the 8-neighborhood of source.
source points is held on the value of 1 (theoretically,
this temperature can be held to infinity). After a cer-
tain chosen time t, the temperature of the image plate
inside the sliding window is examined.
For the purpose of investigating the distribution at
a chosen time t, each block is divided into cells that
are placed into the neighborhood of source (Fig. 1).
Let I(x, y, t) be the function of temperature that was
determined. We can compute the mean temperature in
every cell; Iµ
it
stands for the mean temperature of the
i-th cells at the time t. We use the mean cell tempera-
tures as the values in the feature vector, i.e. the size of
feature vector equals to the number of cells within the
blocks. The final vector of features is composed from
all mean temperatures Iµ
it
inside each block (Fig. 2).
It is important to mention that the transfer of temper-
ature from the sources is not restricted by the block
size but it is computed in the entire sliding window,
and the blocks and cells are only formed only for dis-
tribution measurement. We note that the heat from
one source can be transported to all blocks in the win-
dow.
Before continuing to further technical details, we
regard as desirable to discuss the rationale behind the
method proposed above. The main idea of presented
approach is that the properties of the objects of inter-
est can be described by distribution of energy (tem-
perature). The usefulness of temperature distribution
can be illustrated as follows. Say that the values for
recognition are obtained as the sample values of a
function that is defined over the area of image. If it
is a function of the gradient size of brightness, it is
obvious that it is difficult to hit (by the samples) the
places that are important for recognition (thin edges).
Therefore, in the proposed method, we use the func-
tion of temperature distribution in which the infor-
mation about its changes is not so important. It is
sufficient to obtain the information about the areas in
which the values of distribution function are approx-
imately constant (by sampling, the information about
the areas can be easily obtained). Clearly, the infor-
mation about the areas also contains the information
about the edges in the original image. Since the object
boundary creates the thermal insulator, the area of ob-
ject contains a certain distribution of temperature that
reflects the shape of object. This distribution can be
investigated and used for recognition.
In the real images (Fig. 3(a)), the objects of in-
terest consist of more complicated areas but the gen-
eral idea from the previous paragraph can be used
again. Suppose that the several temperature sources
are located into this image (sliding window); say in
the form of a regular grid (Fig. 3(b)). The values of
temperatures that are transfered from the sources cre-
ate separate segments (Fig. 3(c)). The temperature
distributions inside the segments are used to encode
the information about the appearance of object. For
the purpose of encoding the distribution of tempera-
ture, we investigate the mean temperature of all cells
inside the sliding window in several suitably chosen
times of temperature transfer.
It is clear that the real images contain the areas of
different sizes. At different times, we get various in-
formation about objects (Fig. 4). For the description
of small areas by the temperature distribution, a lower
time (lower number of iterations) during which the
temperature transfer is carried out is required; small
areas are filled with a certain distribution of tempera-
ture (that is sufficient for the description of these ar-
eas) in a relatively short period of time. On the other
hand, the temperature sources that are located into the
big areas require more time to affect the whole areas
of the objects. For instance, the shape of the side win-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
494

hood
side window
roof
windshield
(a) (b) (c)
Figure 3: The real-life image (a). The regular grid of sources (b). The visualization of distribution of temperature from these
sources (c). The value of temperature is depicted by the level of brightness.
orig. t = 50 t = 100 t = 150 t = 200 t = 250
Figure 4: The visualization of distribution of temperature at different times. The value of temperature is depicted by the level
of brightness.
dows is visible at the time t = 50, however, the shape
of the hood is recognizable at the time t ≥ 150 (Fig.
4). For this reason, we compute the temperature dis-
tribution at different times. For example, we can com-
pute two different distributions; one at the time t
1
and
the second at t
2
. In this particular case, the final fea-
ture vector includes the information from both these
distributions. We can take the values of both distri-
butions and compose them sequentially one after an-
other into the final vector. The next possibility is to
combine the values from both distributions together
(e.g. by averaging them). In the first case, the size
of the final vector is two times larger than is the size
in the second case. We regard the second approach as
often more suitable for recognition due to the fact that
the dimensionality of final vector is not increased.
It is important to mention that the classical HOG
descriptors are not rotationally invariant. Since the
proposed descriptors are similar to the HOG descrip-
tors in the sense that in both approaches the features
are computed in a grid, this limitation also occurs in
the proposed descriptors. Similarly as in HOG, the
scale invariance is achieved by rescaling the images.
For practical realization of the method, it is impor-
tant to mention that the thermal field over the one po-
sition of sliding window can be solved by making use
of the following equation (Perona and Malik, 1990)
∂I(x, y, t)
∂t
= div(c∇I), (1)
where I represents the temperature at a position (x, y)
and at a time t, div is a divergence operator, ∇I is the
temperature gradient and c stands for the thermal con-
ductivity. For the source points and the arbitrary time
t ∈ [0, ∞), we set I(x
s
, y
s
, t) = 1, where (x
s
, y
s
) are the
coordinates of source points (i.e. we hold the tem-
perature constant during the whole process of trans-
fer, which is in contrast with the usual diffusion ap-
proaches). In all remaining points, we take into ac-
count the initial condition I(x, y, 0) = 0. We solve the
equation iteratively. The conductivity in Eq. 1 is de-
termined by
c = g(
k
E
k
), (2)
where E is an edge estimate. We define the edge es-
timate E as the gradient of original image E = ∇B,
where B is the brightness function. The function g(·)
has the form of (Perona and Malik, 1990)
g(
k
∇B
k
) =
1
1 +
k
∇B
k
K
2
, (3)
where K is a constant representing the sensitivity to
the edges (Perona and Malik, 1990). Once the tem-
perature field over the input image is obtained (at a
chosen time t), the mean cell temperature Iµ
it
can be
obtained by making use of the formula
Iµ
it
=
RR
M
I(x, y, t)dxdy
|M|
, (4)
where M stands for the cell area, and |M| is its size.
In the next step, the SVM classifier is trained over
the proposed descriptors. Let us consider a training
data set (x
i
, y
i
) where x is the vector of proposed de-
scriptors from training samples and y is the class label
(+1 for cars, -1 for non-cars). The linear SVM de-
termine the hyperplane w · x + b where w is a weight
vector, x is the vector of features and b is a constant.
The goal is to find the optimal decision function that
EnergybasedDescriptorsandtheirApplicationforCarDetection
495

maximizes the distance between the nearest point x
i
and the hyperplane. In the case when it is difficult
to separate the samples in a linear manner, the non-
linear SVM can be used. The non-linear SVM maps
the original space into a high-dimensional space us-
ing a kernel function that separate training samples.
The optimal hyperplane for the non-linear SVM is ob-
tained by the function f (x):
f (x) =
N
∑
i=0
y
i
α
i
k(x, x
i
) + b, (5)
where N represents the number of training patterns, y
i
is a class indicator (+1 for cars, -1 for non-cars) for
each training pattern x
i
, α
i
and b are learned weights
and k(., .) is a kernel function. In our case, we use the
Gaussian radial basis function kernel:
k(x, y) = e
|x−y|
2
2σ
2
. (6)
4 EXPERIMENTS
For the training phase, we collected the data set con-
sisting of 5000 samples (2500 non-cars, 2500 cars).
We experimented with the parameters of our descrip-
tors and we suggest the following configuration. The
configuration is denoted as Energy
288
with the size
of block: 15 × 15 pixels, size of temperature sources:
5×5 pixels, number of cells inside the block: 8, itera-
tions (time) for the temperature transfer: 50, 100, 150.
This configuration consists of 288 descriptors. Each
training sample was resized to the size of 90× 90 pix-
els, for the proposed detector. The example of visu-
alizations of temperature distribution is shown in Fig.
5 (the visualizations of Energy
288
configuration at the
time t = 150).
For comparison, we use the detectors that are
based on the HOG features, LBP (Local Binary Pat-
terns) features (Liao et al., 2007), and Haar features
(Viola-Jones detection framework).
For the HOG based detectors, we created two
configurations: HOG
900
and HOG
300
. HOG
900
was
designed with the following settings; size of block:
32 × 32, size of cell: 16 × 16, horizontal step size:
16, number of bins: 9. This configuration consists of
900 descriptors. Since the proposed method produces
the relatively small number of descriptors, we de-
signed the configuration of HOG
300
that was used for
the purpose to test these descriptors with the smaller
number of features than the HOG
900
configuration.
The HOG
300
configuration was designed with the fol-
lowing settings; size of block: 32 × 32, size of cell:
16 × 16, horizontal step size: 16, number of bins: 3.
This configuration consists of 300 descriptors. For the
HOG descriptors combined with SVM, we used the
same training data set that we used for the proposed
method (2500 non-cars, 2500 cars), and each sample
was resized to the size of 96 × 96. For the detectors
that are based on the Viola-Jones detection framework
with the Haar features and with the features that are
based on LBP, we created the cascade classifiers. The
final strong classifiers consist of 20 stages for LBP
and also for Haar features.
To calculate the performance of approaches, we
used Matthew’s correlation coefficient (MCC) that is
typically used in machine learning to assess the per-
formance of a binary classifier; MCC is useful if two
classes have a different size (in our case, the num-
bers of TP, TN, FP, FN are different). The values of
MCC are between -1 and +1. The higher value repre-
sents better predictions. We collected 28 testing im-
ages from the parking lot to evaluate the approaches.
The testing images were not used in the training phase
and the images were taken in several year seasons (in
different weather and lighting conditions). The exam-
ple of testing images is shown in Fig. 6.
The performance results obtained during our test
are shown in Table 1. In fact, the table is divided into
two parts. The first part shows the results of images
captured in good lighting conditions. The second part
shows the results for winter, rain, and night, i.e. diffi-
cult conditions.
The HOG descriptors were successful in the sunny
weather and good lighting conditions. Nevertheless,
the HOG based detectors failed in the bad lighting
conditions especially at night, in winter and in rain.
In such cases, the numbers of false positives were in-
creased. In poor lighting situations, the HOG based
detectors detect the places in the images as occupied
although the cars are not present in these places. The
artifacts (noise) created in the bad-lit conditions have
a negative effect to the HOG descriptors, despite the
fact that we used the median filter on each image.
Using the HOG descriptors, we achieved the best re-
sult with HOG
900
configuration (in this case, MCC
= 0.90). The feature vector of HOG
300
configura-
tion (with such a small number of descriptors) was
not able to describe the appearance of cars correctly
and this configuration achieved MCC = 0.83 only.
In the good conditions, the Haar based detector
also achieved the high accuracy (MCC = 0.94). In
the worst lighting conditions, the Haar based detector
(like the HOG based detectors) failed in some cases
(MCC = 0.88). Haar based detector and the LBP
based detector missed some of the cars in the difficult
conditions (e.g. in night) and the LBP based detector
even missed some of the cars in the good conditions.
The detectors that are based on these features (Haar,
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
496

Figure 5: The visualization of distribution of temperature. The value of temperature is depicted by the level of brightness.
summer winter night
Figure 6: The parking lot in different conditions.
Table 1: The detection performance (occupancy detection).
sunny winter/rain/night overall performance
TP TN FP FN MCC TP TN FP FN MCC MCC
Energy
288
408 363 13 0 0.97 251 510 17 6 0.93 0.95
HOG
300
405 334 42 3 0.89 252 433 93 6 0.76 0.83
HOG
900
407 356 20 1 0.95 254 453 73 4 0.81 0.90
Haar 405 354 22 3 0.94 242 501 25 16 0.88 0.91
LBP 372 360 11 41 0.87 217 523 4 40 0.87 0.88
LBP) need to increase the amount of training data to
achieve better detection results.
The proposed detector achieved very satisfactory
results in the various weather and lighting conditions
across all testing images. In the sunny weather with
the good conditions, the descriptors reached the very
high MCC results. In winter seasons, during nights
and rain, the presented descriptors achieved much bet-
ter results than the HOG, LBP, Haar feature based
detectors. In general, in night images, the noise has
the negative effect on image quality and especially on
the quality of object edges. The proposed descriptors
that are based on the temperature distribution gain the
noise resistance properties from the diffusion equa-
tion and the noisy images do not cause the problem in
obtaining the relevant features for the object descrip-
tion. In the configuration of Energy
288
of our descrip-
tors, we achieved the best MCC = 0.95 with the 288
descriptors. The HOG
900
configuration needed three-
times more descriptors than the proposed approach to
achieve MCC = 0.90.
Finally, the proposed method shows that the cars
can be described with a reasonable number of features
with very good detection results without need for the
methods for reducing the feature space. The example
of detection results of our approach is shown in Fig.
7.
5 CONCLUSIONS
This paper proposed the efficient method for comput-
ing the image descriptors that are useful for object de-
tection. The proposed descriptors are based on the
distribution of temperature and the vector of these de-
scriptors is used as an input for the SVM classifier.
In this paper, we used the descriptors for detecting
the cars. The results that we demonstrated are very
promising and our future work will focus on the de-
tection of other objects of interest using this method
and we will also focus on the time complexity of com-
putation of the proposed features.
ACKNOWLEDGEMENTS
This work was supported by the SGS in VSB Techni-
cal University of Ostrava, Czech Republic, under the
grant No. SP2013/185.
EnergybasedDescriptorsandtheirApplicationforCarDetection
497

Figure 7: The detection results of our approach.
REFERENCES
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992).
A training algorithm for optimal margin classifiers.
In Proceedings of the 5th Annual ACM Workshop
on Computational Learning Theory, pages 144–152.
ACM Press.
Cao, X., Wu, C., Yan, P., and Li, X. (2011). Linear svm clas-
sification using boosting hog features for vehicle de-
tection in low-altitude airborne videos. In Image Pro-
cessing (ICIP), 2011 18th IEEE International Confer-
ence on, pages 2421 –2424.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886 –
893 vol. 1.
Fabian, T. (2008). An algorithm for parking lot occupation
detection. In Computer Information Systems and In-
dustrial Management Applications, 2008. CISIM ’08.
7th, pages 165 –170.
Fusek, R., Sojka, E., Mozdren, K., and Surkala, M. (2013a).
Energy-transfer features and their application in the
task of face detection. In Advanced Video and Signal
Based Surveillance (AVSS), 2013 10th IEEE Interna-
tional Conference on, pages 147–152.
Fusek, R., Sojka, E., Mozd
ˇ
re
ˇ
n, K., and
ˇ
Surkala, M. (2013b).
Energy-transfer features for pedestrian detection. In
Bebis, G., Boyle, R., Parvin, B., Koracin, D., Li, B.,
Porikli, F., Zordan, V., Klosowski, J., Coquillart, S.,
Luo, X., Chen, M., and Gotz, D., editors, Advances
in Visual Computing, volume 8034 of Lecture Notes
in Computer Science, pages 425–434. Springer Berlin
Heidelberg.
Huang, C., Ai, H., Li, Y., and Lao, S. (2007). High-
performance rotation invariant multiview face de-
tection. IEEE Trans. Pattern Anal. Mach. Intell.,
29(4):671–686.
Huang, C.-C. and Wang, S.-J. (2010). A hierarchical
bayesian generation framework for vacant parking
space detection. Circuits and Systems for Video Tech-
nology, IEEE Transactions on, 20(12):1770 –1785.
Ichihashi, H., Katada, T., Fujiyoshi, M., Notsu, A., and
Honda, K. (2010). Improvement in the performance
of camera based vehicle detector for parking lot. In
FUZZ-IEEE, pages 1–7. IEEE.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
498

Liao, S., Zhu, X., Lei, Z., Zhang, L., and Li, S. Z. (2007).
Learning multi-scale block local binary patterns for
face recognition. In ICB, pages 828–837.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In Image Pro-
cessing. 2002. Proceedings. 2002 International Con-
ference on, volume 1, pages I–900–I–903 vol.1.
Mimbela, L., Klein, L., Kent, P., Hamrick, J., Luces, K.,
and Herrera, S. (2007). Summary of Vehicle Detec-
tion and Surveillance Technologies used in Intelligent
Transportation Systems. Federal Highway Adminis-
tration’s (FHWA) Intelligent Transportation Systems
Program Office.
Papageorgiou, C. and Poggio, T. (2000). A trainable system
for object detection. Int. J. Comput. Vision, 38(1):15–
33.
Perona, P. and Malik, J. (1990). Scale-space and edge detec-
tion using anisotropic diffusion. IEEE Trans. Pattern
Anal. Mach. Intell., 12:629–639.
Schneiderman, H. and Kanade, T. (2004). Object detection
using the statistics of parts. Int. J. Comput. Vision,
56(3):151–177.
Suard, F., Rakotomamonjy, A., Bensrhair, A., and Broggi,
A. (2006). Pedestrian detection using infrared images
and histograms of oriented gradients. In Intelligent
Vehicles Symposium, 2006 IEEE, pages 206 –212.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In Computer Vi-
sion and Pattern Recognition, 2001. CVPR 2001. Pro-
ceedings of the 2001 IEEE Computer Society Confer-
ence on, volume 1, pages I–511 – I–518 vol.1.
Viola, P. and Jones, M. (2002). Robust real-time object
detection. International Journal of Computer Vision,
57(2):137–154.
Wu, B., Ai, H., Huang, C., and Lao, S. (2004). Fast rotation
invariant multi-view face detection based on real ad-
aboost. In Automatic Face and Gesture Recognition,
2004. Proceedings. Sixth IEEE International Confer-
ence on, pages 79–84.
Zheng, W. and Liang, L. (2009). Fast car detection using
image strip features. In Computer Vision and Pattern
Recognition, 2009. CVPR 2009. IEEE Conference on,
pages 2703–2710.
Zhu, Q., Yeh, M.-C., Cheng, K.-T., and Avidan, S. (2006).
Fast human detection using a cascade of histograms
of oriented gradients. In Computer Vision and Pat-
tern Recognition, 2006 IEEE Computer Society Con-
ference on, volume 2, pages 1491 – 1498.
EnergybasedDescriptorsandtheirApplicationforCarDetection
499
