
Fast Self-supervised On-line Training for Object Recognition Specifically
for Robotic Applications
Markus Schoeler, Simon Christoph Stein, Jeremie Papon, Alexey Abramov and Florentin W
¨
org
¨
otter
Georg-August University of G
¨
ottingen, III. Physikalisches Institut - Biophysik, G
¨
ottingen, Germany
Keywords:
Object Recognition, On-line Training, Local Feature Orientation, Invariant Features, Vision Pipeline.
Abstract:
Today most recognition pipelines are trained at an off-line stage, providing systems with pre-segmented images
and predefined objects, or at an on-line stage, which requires a human supervisor to tediously control the
learning. Self-Supervised on-line training of recognition pipelines without human intervention is a highly
desirable goal, as it allows systems to learn unknown, environment specific objects on-the-fly. We propose
a fast and automatic system, which can extract and learn unknown objects with minimal human intervention
by employing a two-level pipeline combining the advantages of RGB-D sensors for object extraction and
high-resolution cameras for object recognition. Furthermore, we significantly improve recognition results
with local features by implementing a novel keypoint orientation scheme, which leads to highly invariant but
discriminative object signatures. Using only one image per object for training, our system is able to achieve a
recognition rate of 79% for 18 objects, benchmarked on 42 scenes with random poses, scales and occlusion,
while only taking 7 seconds for the training. Additionally, we evaluate our orientation scheme on the state-
of-the-art 56-object SDU-dataset boosting accuracy for one training view per object by +37% to 78% and
peaking at a performance of 98% for 11 training views.
1 INTRODUCTION
Creating recognition systems which can quickly adapt
to new and changing environments is not only a chal-
lenging but also highly desirable goal for the machine
vision community. Solving this goal is especially im-
portant for creating machines (robots), which are able
to assist humans in their daily life, as this task requires
robots to interact with a multitude of objects it may
encounter in a household. This, in turn, depends on
successful detection and recognition of objects rele-
vant for potential actions. Unluckily object recogni-
tion still remains one of the hardest tasks in computer
vision, which leads to failures in todays robotic appli-
cations (Szeliski, 2010). One reason is that classifi-
cation performance scales badly with the number of
trained classes, which prohibits training the recogni-
tion system of a robot to deal with all possible objects
it may encounter. One way to solve this problem is to
reduce the objects to the most likely classes for a spe-
cific environment (a robot working in a kitchen will
probably not need the knowledge about a hay-fork).
However, this inevitably limits the robot to the most
probable classes from the designers point of view.
Furthermore recognizing specific instances (like the
red coffee cup) is not possible. We, on the other hand,
want to pursue a different path. We want to create
a robot which is able to do quick, automatic and ro-
bust learning from scratch, enabling it to adapt to new
or changing environments and only learning objects
it encounters. Consequently our system needs to deal
with the following problems in the training stage:
T1 Automatic detection and extraction of object can-
didates from the scene without prior object knowl-
edge.
T2 Automatic training set generation with minimal
human intervention.
T3 Dealing with a training set which is as small as
possible and preferably just made of one obser-
vation per object (users should not spend their
time rearranging objects for the robot to generate
a large training set).
T4 Quick training of the recognition system.
For the recognition stage the system needs to deal
with additional problems:
R1 Quick and robust recognition of objects in a scene
(especially dealing with different distances, poses
and occlusion of objects).
94
Schoeler M., Stein S., Papon J., Abramov A. and Woergoetter F..
Fast Self-supervised On-line Training for Object Recognition Specifically for Robotic Applications.
DOI: 10.5220/0004688000940103
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 94-103
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

R2 Determining the 3D coordinates of all objects for
subsequent manipulations.
We address these issues by providing:
• A new two stage vision pipeline combining low
resolution 3D information for object detection and
high resolution 2D information for object recogni-
tion. 3D information is needed to make extraction
of unknown objects on textured background pos-
sible (see Section 3.1). In addition using a high-
resolution camera does significantly improve ob-
ject recognition due to the much higher quality vi-
sual information as we show in section 4.2.
• A novel orientation scheme for local keypoints,
denoted as Radial, which is rotation invariant but
includes information about the object shape and
thus making object signatures much more dis-
criminative. We show that it outperforms state-of-
the-art orientation schemes on two benchmarks in
section 4.2 and 4.3.
• A fusion of two classifiers using Gray-SIFT
(Lowe, 2004) and a simple local color feature
(CyColor), which is based on the hue and satura-
tion channels of the HSV-colorspace. This com-
bination, called Fused, is not only much faster to
extract than color versions of SIFT, but also sig-
nificantly boosts recognition performance on the
benchmarked datasets.
This enabled us to build a system which works on-
line and highly automatically. It starts completely un-
trained, continues with fully automatic object extrac-
tion and leads to reliable object recognition.
2 RELATED WORK
Although there are many recognition systems tack-
ling some of the aforementioned problems, only few
of them work fully automatic starting without ob-
ject knowledge and with minimal human interven-
tion. The reason is that most systems which try
to extract objects from 2D images already need a
trained classifier or rely on video streams and hu-
man manipulation to extract moving objects (Gall
et al., 2011; Schiebener et al., 2011; Welke et al.,
2010; Zhou et al., 2008). While there are methods
which use a trained classification algorithm to seman-
tically segment static images (Lai et al., 2012; Vi-
jayanarasimhan and Grauman, 2011), few of them
can extract unknown objects, like in (Iravani et al.,
2011) where the authors threshold the spatial density
of SIFT features or in (Ekvall et al., 2006) where a
background subtraction algorithm is employed. Un-
fortunately both systems have their drawbacks. In the
first case objects can only be placed on texture free
ground and in the second case training requires a pick
and place-back action by a human supervisor, thus be-
ing not fully automatic (see problem T1 and T2). Fur-
thermore, using just 2D images will not enable the
robot to infer the absolute position of an object in the
room, thus rendering it helpless when trying to exe-
cute an action and failing at problem R2.
Two other good approaches are presented in
(Schiebener et al., 2011) and (Welke et al., 2010).
The authors of the first work extract objects by phys-
ical robot interaction. Features are being tracked dur-
ing the manipulation and simple geometrical models
(planes and cylinders) are fitted to the point clouds
for building object models. This method needs ob-
jects which are textured for reliable feature matching
as well as objects which can be described by planes
and cylinders. Furthermore, the robot needs to move
all objects it encounters for training as well as for
recognition, which dramatically slows down the sys-
tem. In the second work objects are put into the hand
of the robot and multiple images of the object are ac-
quired while turning it. Since objects have to be seg-
mented from the background using a stereo camera,
problems with untextured objects or objects similar
to the background emerge. Also holding an object in
the hand can occlude important parts for the training,
especially for small objects like the pen we use in our
experiments.
To compare object recognition pipelines, re-
searches often rely on publicly available benchmarks
like the RGB-D Object Dataset (Lai et al., 2011) or
the KIT ObjectModels Web Database (Kasper et al.,
2012). We did not use them, because results for
comparison are only available for turntable record-
ings, where objects are placed in the same spot and
recorded from different inclinations. This is a very
constrained scenario as objects are always placed up-
right and in-plane rotation is minimal. Instead, we
used the SDU-dataset (Mustafa et al., 2013), which
consists of single objects in arbitrary poses, but in a
fixed distance and without occlusion. Robots, how-
ever, specifically also face objects in random dis-
tances and with occlusion, while working in human
environments. Therefore, we recorded a new pub-
licly available benchmark based on cluttered, high-
resolution scenes with multiple objects partially oc-
cluding each other in random distances and poses
1
.
This benchmark has been created using our proposed
object detection pipeline.
1
http://www.dpi.physik.uni-goettingen.de/∼mschoeler/
public/42-scenes/
FastSelf-supervisedOn-lineTrainingforObjectRecognitionSpecificallyforRoboticApplications
95
3 METHODS
To automatically detect, extract and recognize objects
in the scene, and thus solving problems T1 and R1,
we implemented a vision system which consists of
two sensors:
1. RGB-D sensor for object detection and extrac-
tion (Section 3.1).
2. High-resolution 2D camera for the object recog-
nition (Section 3.2).
Starting at an untrained recognition system the robot
makes use of 3D information provided by the RGB-
D sensor to automatically extract the object in front
of it. Hereupon the vision system creates a mask and
warps it to the reference frame of the high-resolution
camera, takes an image and saves it for the training.
The only job of the human supervisor is to actually
tell the robot the names of the encountered objects,
which addresses problem T2.
3.1 Object Detection and Extraction
All data from the RGB-D camera is processed in the
form of point clouds. Creating object masks is done
in the following way utilizing functions from the point
cloud library (Rusu and Cousins, 2011):
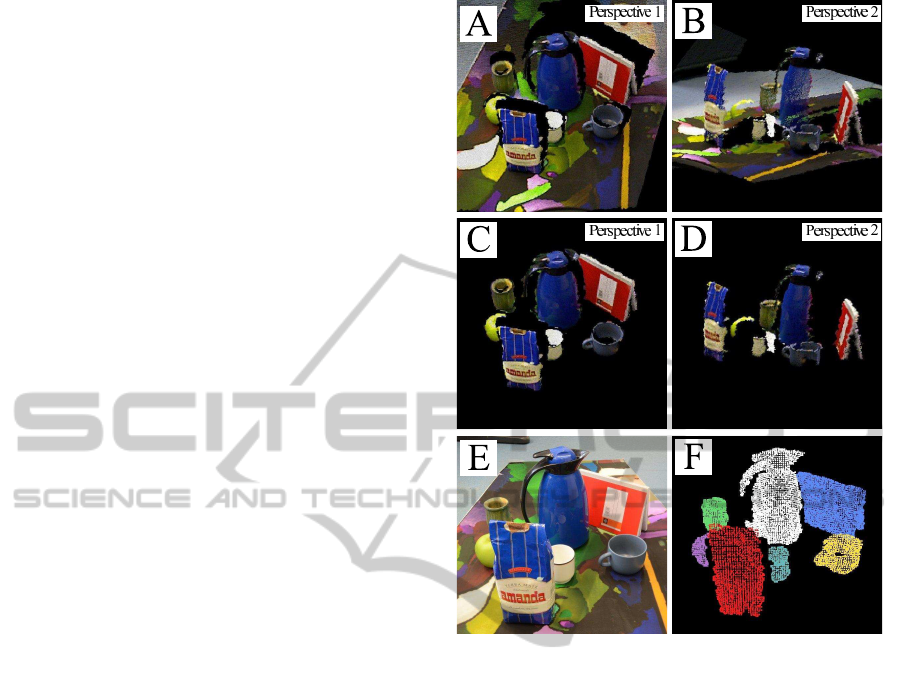
1. The point cloud (see Figure 1 A and B) is down-
sampled for faster processing using a voxelgrid-
filter.
2. The groundplane is subtracted (see Figure 1 C
and D) by using a RANSAC plane fit to the vox-
elized cloud and deleting the respective inliers
(This leaves a set of disconnected object candi-
dates in our cloud, see Figure 1 C and D).
3. An Euclidean clustering scheme with a fixed dis-
tance threshold is applied to the cloud and all vox-
els within a cluster are treated as belonging to one
object.
For all experiments a voxel resolution of 5 mm, a
groundplane separation threshold of 5 mm and a clus-
tering threshold of 4 cm have been used. The resulting
labeled voxel cloud is then projected onto the high-
resolution camera frame (see Figure 1 F), and for each
indiviual cluster a 2D mask is created using the posi-
tions of the projected points belonging to that cluster.
Since the number of projected voxels for one object is
much smaller than the actual pixel count on the high-
resolution image covering the object (due to the dif-
ference in resolution), we extend each projected voxel
on the image by the average distance to the nearest
neighboring voxel with the same label. This allows
Figure 1: Process chain for extracting objects from the
scene. A and B: The acquired point cloud from the RGB-
D camera from different perspectives. C and D: The point
cloud after groundplane subtraction. E: High-resolution
camera image. F: Projected voxels on high-resolution im-
age.
us to create a full mask for each object in the high-
resolution image instead of just having a sparse set
of pixels from the projection. Note that this simple
scheme can provide us with fast, robust and accurate
segmentation even for scenes which are cluttered in
2D or with textured background, as long as the visi-
ble parts of the objects are not touching in 3D space.
Since we already possess complete 3D information
for all objects, unlike systems which are working in
2D solely, we automatically solved problem R2 as
well.
3.2 Object Recognition
We implemented two recognition pipelines to incor-
porate full RGB information. One based on color
versions of SIFT and a faster version fusing two dis-
joint classifiers: Gray-SIFT with a three dimensional
CyColor feature. This combination will be denoted
as Fused. We chose SIFT features as they are con-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
96

sidered state-of-the-art and are widely used in recent
works of object recognition (Silberman and Fergus,
2011; Zhou et al., 2010; Van de Sande et al., 2010;
Binder et al., 2011; Bo et al., 2011). In all cases a bag-
of-words algorithm with k-means clustering (Csurka
et al., 2004) is employed to generate compact signa-
tures for the objects. We use all descriptors of up
to 5 images per object for the vocabulary generation
(about 4000 to 30000 for all objects). We cluster
them to 300 visual words using k-means and gener-
ate signatures by binning each descriptor to the near-
est visual word in L2-distance. The resulting sig-
natures are used with one-versus-rest support vector
machines (SVM) (Vapnik, 1998) using a histogram
intersection-kernel (Barla et al., 2003) for the classi-
fication.
3.2.1 Radial Orientation Scheme
While we leave the SIFT descriptors untouched, we
do adapt the detector step (determining the location,
size and orientation of the keypoints) to leverage on
the additional information provided by the first part of
our pipeline 3.1. Keypoint locations are placed on a
regular grid within each object mask with a stepsize of
∆D/d
Step
, with d
Step
being a fixed number and ∆D be-
ing the diagonal of the mask size (∆D =
√
∆h
2
+ ∆w
2
,
∆h and ∆w denoting the height and width of the
mask’s bounding box, respectively). In our experi-
ments a value of 14 for d
Step
yielded a good trade-
off between classification performance and speed. An
overview of how we are locating the keypoints can be
seen in Figure 2.
Figure 2: Defining keypoint location and object center.
Left: Extracted Object mask, Middle: Determined object
size and center, Right: Keypoint locations.
For each location we extract SIFT features on four
different scales
∆D
80
2.5
l
(l = 0,1,2,3). Using four dif-
ferent sizes makes our signatures more robust to small
errors in object size estimation in case of occlusion
and is a common technique in the literature (Gehler
and Nowozin, 2009; Bosch et al., 2007b). In contrast
to the aforementioned works we are not using a fixed
scale but instead scale our SIFT features with the di-
mension of the mask, which makes our classification
scheme completely robust to scale variations, even for
unknown object, which addresses problem R1.
As the orientation of the keypoint decides, if the
resulting signatures are invariant to in-plane rotation,
we want to briefly discuss two popular approaches
found in the literature: Local gradient and Fixed ori-
entation. The Local gradient scheme orients features
along the dominant local brightness gradient of the
image patch around each keypoint. This is by far the
most widely used orientation scheme (Lowe, 2004;
Zhou et al., 2010; Silberman and Fergus, 2011; Bosch
et al., 2007b; Bosch et al., 2007a) as it makes im-
age signatures invariant to in-plane rotation. This un-
fortunately sacrifices discriminative power (Calonder
et al., 2010), as important information about the ob-
ject shape, encoded in the orientation of the dominant
local gradient, is lost. Consequently an important cue,
describing the object shape, is missing. The Fixed
orientation scheme on the contrary orients all key-
points in a fixed direction (Calonder et al., 2010; Bay
et al., 2008), thus incorporating the shape information
into the signature and as a result making it more dis-
criminative. This however comes at the cost of mak-
ing it variant to in-plane object rotation. To make our
signatures robust to inplane-rotation, but still keep-
ing their discriminative power, we introduce a simple,
but powerful novel orientation scheme named Radial.
For this we approximate the center of the object by
determining the middle of the object mask and ori-
ent all keypoints in a radial manner, pointing away
from the center. An example of the three orientation
schemes is depicted in Figure 3. Note that using the
Radial orientation scheme requires knowledge about
each object’s location, which we retrieve by segment-
ing in 3D directly.
Figure 3: Comparing the three keypoint orientation
schemes: Fixed orientation, Local gradient orientation and
our Radial orientation.
3.2.2 CyColor Feature
Traditionally SIFT descriptors are extracted on gray-
scale images. One popular possibility to use full RGB
FastSelf-supervisedOn-lineTrainingforObjectRecognitionSpecificallyforRoboticApplications
97

information is to extract SIFT descriptors on all chan-
nels of an image separately and concatenating each
channel’s descriptors to one big descriptor (Van de
Sande et al., 2010; Bosch et al., 2007a). While this
generally boosts recognition performance all opera-
tions for SIFT have to be repeated on three channels,
which makes the feature extraction slow. Addition-
ally, SIFT-based feature can not deal with textureless
objects as SIFT only considers gradients. To speed
up the feature extraction and to cope with textureless
objects, we employed a second much faster feature
which we will call CyColor. This feature is extracted
using the local pixel value at a keypoint location in
HSV-colorspace. To account for the cyclic nature of
the hue channel, we defined the three dimensional fea-
ture vector
~
f
C
in the following way:
~
f
C
= [sin(2πH),cos(2πH),S],
with H and S denoting the hue and saturation value
[0,1]. Using this feature vector one easily gets rid
of the problematic cyclic nature of the hue channel,
while still being mostly robust to illumination vari-
ations, since we ignore the value channel. Since our
CyColor feature itself does not cover shape of the ob-
ject, we always fuse it with Gray-SIFT as described in
the next section.
3.2.3 Fused Classifier
There are multiple ways to fuse different classifiers
(Rodriguez et al., 2007; Gehler and Nowozin, 2009),
but most of these methods need a large training set
to determine meaningful weights via cross-validation.
We on the other side want to keep the training set
as small as possible (see problem T3). Consequently
one robust weighting scheme (when intra object vari-
ance for the individual features is unknown), is av-
eraging the classification results. For this we train
two independent classifiers: One using Gray-SIFT
and one using aforementioned CyColor feature. Each
classifier extracts features on the same keypoints. For
the classification we use one-against-rest SVMs and
average their scores such that class j gets the score:
Score( j) =
1
2
Score
CyColor
( j) + Score
SIFT
( j)
4 EXPERIMENTAL EVALUATION
Our main goal is to create a system which can be
trained as fast as possible with minimal human inter-
vention. Consequently we investigate how the differ-
ent orientation schemes and features deal with a lim-
ited number of training samples. This is important as
it shows how many observations the robot needs to
robustly recognize the objects and therefore how fast
the robot learns to distinguish between objects start-
ing from an untrained system. We tested our system
on two datasets: Our own publicly available scene
benchmark and on the SDU-dataset which was kindly
provided by the authors (Mustafa et al., 2013).
4.1 Experiment on 42-Scenes
Benchmark
For the 42-Scenes Benchmark we recorded about 60
images per object in different poses and under differ-
ent lighting conditions using the proposed object ex-
traction pipeline. All objects are shown in Figure 4.
For object recognition the robot was only allowed to
select a fixed number of images per object from this
pool for the training. After the classifier was trained,
we exposed it to a new scene with several objects be-
ing placed in random orientation, distance and pose
with partial occlusion up to 50%. Each object was
shown in 15 scenes. Example scenes together with
masks and classification results are depicted in Figure
5.
Apple1 Apple2
Banana
Box
Cookies
Cup1
Cup2 Cup3
Kalebasse Knife
Milk
Notebook
Orange
Pen
Spoon
Tea
Teabagbox
Thermos
Figure 4: All objects used in the experiments.
To simulate the effect of a reduced image res-
olution, as one would encounter when directly us-
ing the RGB-D camera images for the recognition,
we reduced the high-resolution images and masks
from their original size R
f ull
= 2464 ×1632 pixels
to the maximum Microsoft Kinect resolution R
low
=
1280 ×1024 pixels using bilinear interpolation. First
note that the result of this operation still yields much
higher quality images (less noise, sharper contrasts)
as compared to the images you can retrieve with the
Microsoft Kinect and second that using the depth
channel limits your resolution to 640 ×480 pixels.
We compare three different features HSV-SIFT
(Bosch et al., 2007b; Bosch et al., 2007a; Gehler
and Nowozin, 2009), Opponent-SIFT (Van de Sande
et al., 2010) and Fused (Section 3.2.3), as they all in-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
98

A B
C D
Figure 5: Four scenes from our 42-Scenes Benchmark with cluttered objects in various poses which the robot had to solve.
(A-D): Top left: High-resolution scene image, Top right: Automatically extracted masks. Bottom: Example outcome using
Radial-Fused.
corporate color information. For HSV-SIFT, features
are extracted on each of the three HSV-channels sep-
arately and concatenated to form a 3 ×128 = 384 di-
mensional vector. Opponent-SIFT does the same but
on the three CIELAB channels. Altogether we com-
pared the six following classification algorithms:
• Fixed-HSV-Low. Fixed keypoint detector with
HSV-SIFT features on reduced scene resolution
R
low
.
• Fixed-HSV. Fixed keypoint detector with HSV-
SIFT features on full scene resolution R
f ull
.
• Local-HSV. Local gradient detector with HSV-
SIFT features on full scene resolution R
f ull
.
• Radial-HSV. Radial keypoint detector with HSV-
SIFT features on full scene resolution R
f ull
.
• Radial-Opponent. Radial keypoint detector with
Opponent-SIFT features on full scene resolution
R
f ull
.
• Radial-Fused. Radial keypoint detector with
Gray-SIFT features combined with CyColor fea-
tures (as described in Section 3.2.3) on full scene
resolution R
f ull
.
To compare each classifier’s performance we aver-
aged the F1-score (Hu et al., 2009) across all objects
and across all scenes for 20 runs with a random draw
of training images (see Figure 6). We decided to use
the F1-score, as it puts equal weights on precision
and recall and therefore describing the overall perfor-
FastSelf-supervisedOn-lineTrainingforObjectRecognitionSpecificallyforRoboticApplications
99

30%
40%
50%
60%
70%
80%
90%
100%
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31
F1-score
Number of training samples
Radial-Fused
Radial-Opponent
Radial-HSV
Local-HSV
Fixed-HSV
Fixed-HSV-Low
Figure 6: Averaged F1-score across all objects in all 42
scenes using different classification algorithms versus num-
ber of training images per object.
mance of the recognition system. It ranges from 0 to
1 (0 being worst and 1 being best) and is defined as
F1 = 2
PR
P + R
,
with P and R denoting precision and recall, respec-
tively. For comparing the processing time of the dif-
ferent classifiers we used an Intel i7 hexacore proces-
sor with 3.2 GHz per core.
4.2 Discussion 42-Scenes Benchmark
Influence of Image Resolution
When comparing Fixed-HSV-Low and Fixed-HSV,
the lower resolution R
low
in general decreased the
classification results significantly. While the differ-
ence for one training image per object is negligible
(as both have a bad performance), an increasing
number of training images shows the influence of
the lower resolution. Due to the low resolution
visual information of the object is lost for the SIFT
features, which decreased their discriminative power.
We found out, that reducing the image resolution to
640 ×480, the average F1-score again decreased by
roughly 6% compared to the resolution R
low
. This is
consistent with the findings of Ekvall et al. (Ekvall
et al., 2006) who also noted a decrease in perfor-
mance when decreasing resolution. This strongly
emphasizes the importance of image resolution and
justifies our approach to combine a low resolution
RGB-D sensor and a high-resolution RGB camera.
Influence of Orientation Scheme
When comparing the three orientation schemes
(Fixed-HSV, Local-HSV, Radial-HSV), two
regions can be analyzed separately:
1. Few training images per object (≤ 11 images per
object)
2. Enough training images per object, such that an
increase does not improve classifier performance
significantly (> 11 images per object)
Few Training Images: Having only a few images puts
very high emphasis on the signature itself. Orienta-
tion schemes which produce signatures invariant to
in-plane rotation like Radial and Local are superior
to orientation schemes which are fragile to object ro-
tation like Fixed. Accordingly one needs only a few
images to generalize to the full object using the for-
mer scheme. The distinction between Radial and Lo-
cal is caused by the poor discriminative power of the
Local scheme as described in Section 3.2.1.
Many Training Images: Using many images the ro-
bustness of the signature becomes less important, be-
cause different object poses are known for the train-
ing. Here the performance is more dictated by the
power of the SVM, which uses all signatures as in-
put to separate the classes. Consequently orienta-
tion schemes which lead to discriminative signatures
(Radial and Fixed) work better in this regime. This is
the reason why the performance of Local drops below
the performance of Fixed when increasing trainingset
size.
Since our orientation scheme is robust to in-plane
rotation, but still discriminative (see Figure 3) , it is
by far the best choice for robotic applications using
local features and improves classification by 16.9%
for one training image per object and about 10%
for the saturated region. Please also note that the
Radial orientation scheme is very fast to calculate (in
average 4 ms per object).
Influence of Feature Selection
Comparing Radial-HSV and Radial-Opponent one
clearly sees that the Opponent version of the SIFT
descriptor is superior to the HSV version. This
confirms the findings of (Van de Sande et al., 2010)
where the authors compared several color extensions
of SIFT. When only a few images are available the
classifiers Radial-Fused and Radial-Opponent
perform equally good, with Radial-Fused being
slightly better for one training image (2%) and
Radial-Opponent being better for more than 5
images per object (3%). The reason for the fused
classifier to perform better for a very small number of
training images is that the CyColor descriptor is fully
invariant to any object rotation in 3D as long as the
same side is visible or the object color distribution
does not change too much when rotating the object.
Consequently we achieve results of 79% for Radial-
Fused, 77% for Radial-Opponent and 70% for
Radial-HSV when using only one image per object.
In the saturated region (> 11 images per object) the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
100

performance of Radial-Fused and Radial-HSV are
identical, because we train already with a variety of
different poses. This means that being completely
pose invariant and being only invariant to in-plane
rotation does not make a big difference any more.
Here Radial-Opponent shows better results than
Radial-Fused with an average score of 93.1%, but at
the cost of being slower as shown below. Noteworthy
is that using the red-green and yellow-blue channels
of the Opponent-color space as base for our CyColor
feature decreased the performance of the Fused
classifier to 76% for one training image. The reason
is, that the Opponent-color space is not invariant to
lighting variations in contrast to the H and S channels
of the HSV color space (Van de Sande et al., 2010).
This is a severe problem when using the absolute val-
ues of these channels, whereas considering gradients,
as SIFT does, circumvents this problem.
Time Performance
Since we are also interested in the speed of the
recognition system (problems T4 and R1), we mea-
sured the time for object extraction and compared
the training and recognition time for the three best
scoring classifiers. The average time for the object
extraction in a scene with 6 objects is 30 ms. Table
1 shows that Radial-HSV and Radial-Opponent
are 3 times slower for the recognition and about
2 times slower for the training compared to the
combination of Gray-SIFT and CyColor. This result
is not surprising as the SIFT feature extraction step
is by far the slowest part of the whole recognition
process and consequently doing it on three channels
instead of just one increases the processing time
significantly. The training time grows approximately
linearly with the number of images used for the
training, again showing the advantage of a clas-
sification algorithm which can deal with a small
number of training images. To reach the maximum
performance (Radial-Opponent with 13 images per
object) training takes 201 s. Consequently a decision
has to be made, whether a high recognition rate or a
fast system is preferred.
Table 1: Comparing training time and average object
recognition time for Radial-HSV, Radial-Opponent and
Radial-Fused using a single training image per object.
Classifier Training [s] Recognition [s]
Radial-Fused 6.8 0.23
Radial-Opponent 14.7 0.66
Radial-HSV 15.7 0.68
40%
50%
60%
70%
80%
90%
100%
1 3 5 7 9 11 13 15 17 19 21
Accuracy
Number of training samples
Radial-Fused
Radial-Opponent
Radial-HSV
SDU-Best
Figure 7: Averaged classification accuracy versus number
of training images for the SDU-dataset.
4.3 Experiment and Discussion
SDU-dataset
For the SDU-dataset (Mustafa et al., 2013) we fol-
lowed the same experimental procedure as described
in the paper. Since we are interested to see how well
our classifier deals with a limited number of train-
ing samples, we mainly compared to Figure 7 in their
paper. Figure 7 shows accuracy (mean of the con-
fusion matrix) of our three highest scoring Radial
classifiers on the SDU-dataset as well as results of
their best scoring classifier in the paper (named SDU-
Best which uses a combination of a point cloud fea-
ture and a hue-saturation histogram, (Mustafa et al.,
2013)-Figure 7-pink curve). All parameters are left
unchanged. As can be seen, all Radial classifiers are
supperior to the SDU-Best classifier, altough we did
not use the depth channel. Radial-Fused is by far
the best scoring classifier (especially for few training
samples) with an accuracy increase of 37% compared
to SDU-Best (78% versus 41%) for a single training
view. Using 11 and more training views per object,
accuracy increases to 98%, which is a big improve-
ment over the state-of-the-art as presented in the pa-
per. This is a significant result as it shows how valu-
able absolute color information (only provided by the
CyColor descriptors) is for object recognition espe-
cially for few training samples.
As stated by the authors knowing about the shape
is indispensable for robust recognition. While they
need 3D information to calculate shape descriptors,
our Radial orientation scheme includes shape infor-
mation in a natural way directly from 2D data.
5 CONCLUSIONS
This work presented a recognition system, which can
FastSelf-supervisedOn-lineTrainingforObjectRecognitionSpecificallyforRoboticApplications
101

adapt to new and changing environments. This is es-
pecially important for robots assisting humans in their
daily life. To achieve this a system needs to deal
with problems T1 - R2 as described in our introduc-
tion. Therefore we designed a two stage pipeline, fea-
turing fast, automatic and robust learning of objects
with minimal human intervention. In the first stage
(Object detection and extraction) the robot uses 3D
information from the RGB-D sensor to automatically
retrieve objects from cluttered scenes. Projecting all
object masks to a high-resolution camera, we were
able to provide the second stage of the recognition
system (Object recognition) with accurate and de-
tailed visual information.
We tested our recognition system in two scenarios:
First with 18 objects with varying poses, illumination
and distances in 42 scenes with partial occlusion and
second on the SDU-dataset with 56 objects in arbi-
trary poses. The former is made publicly available.
Comparing results of the SDU-Benchmark to our 42-
Scenes Benchmark, one can see that our benchmark
is more challenging, although the SDU-dataset uses
more objects. The reason is twofold: First, we did not
put any constrains on object pose, distance as well as
illumination, and second, we evaluate on a collection
of labeled and masked scenes which show occlusion,
making the recognition more difficult. In both bench-
marks our novel Radial orientation scheme achieved
better than state-of-the-art results. This is because
our orientation scheme leads to signatures which do
incorporate shape information in contrast to widely
used local gradient orientation schemes. Furthermore,
using a simple fusion of Gray-SIFT and our three
dimensional CyColor feature did not only speed up
the recognition pipeline (7 s for the full training in
our 42-Scenes Benchmark), but also boosts classifica-
tion accuracy for the SDU-dataset significantly. This
shows the value of absolute color information for ob-
ject recognition, especially for few training samples.
The combination of our Radial orientation scheme
with our CyColor features leads to an improvement
over the state-of-the-art on the SDU-dataset by +37%
to a total of 78% for only a single training view and
to 98% for 11 training views.
REFERENCES
Barla, A., Odone, F., and Verri, A. (2003). Histogram in-
tersection kernel for image classification. In Image
Processing(ICIP), 2003 International Conference on,
volume 3, pages III–513–16 vol.2.
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Computer Vision
Image Understanding, 110(3):346–359.
Binder, A., Wojcikiewicz, W., M
¨
uller, C., and Kawanabe,
M. (2011). A hybrid supervised-unsupervised vocab-
ulary generation algorithm for visual concept recogni-
tion. In Proceedings of the 10th Asian conference on
Computer vision - Volume Part III, ACCV’10, pages
95–108, Berlin, Heidelberg. Springer-Verlag.
Bo, L., Ren, X., and Fox, D. (2011). Depth kernel descrip-
tors for object recognition. In Intelligent Robots and
Systems (IROS), 2011 IEEE/RSJ International Con-
ference on, pages 821–826.
Bosch, A., Zisserman, A., and Munoz, X. (2007a). Repre-
senting shape with a spatial pyramid kernel. In Pro-
ceedings of the 6th ACM international conference on
Image and video retrieval, CIVR ’07, pages 401–408,
New York, NY, USA. ACM.
Bosch, A., Zisserman, A., and Muoz, X. (2007b). Image
classification using random forests and ferns. In Com-
puter Vision (ICCV), 2007 IEEE 11th International
Conference on, pages 1–8.
Calonder, M., Lepetit, V., Strecha, C., and Fua, P. (2010).
Brief: binary robust independent elementary features.
In Proceedings of the 11th European conference on
Computer vision: Part IV, ECCV’10, pages 778–792,
Berlin, Heidelberg. Springer-Verlag.
Csurka, G., Dance, C. R., Fan, L., Willamowski, J., and
Bray, C. (2004). Visual categorization with bags of
keypoints. In Workshop on Statistical Learning in
Computer Vision, ECCV, pages 1–22.
Ekvall, S., Jensfelt, P., and Kragic, D. (2006). Integrating
active mobile robot object recognition and slam in nat-
ural environments. In Intelligent Robots and Systems
(IROS), 2006 IEEE/RSJ International Conference on,
pages 5792–5797.
Gall, J., Fossati, A., and Van Gool, L. (2011). Func-
tional categorization of objects using real-time mark-
erless motion capture. In Computer Vision and Pat-
tern Recognition (CVPR), 2011 IEEE Conference on,
pages 1969–1976.
Gehler, P. and Nowozin, S. (2009). On feature combina-
tion for multiclass object classification. In Computer
Vision (ICCV), 2009 IEEE 12th International Confer-
ence on, pages 221–228.
Hu, X., Zhang, X., Lu, C., Park, E. K., and Zhou, X. (2009).
Exploiting wikipedia as external knowledge for doc-
ument clustering. In Proceedings of the 15th ACM
SIGKDD international conference on Knowledge dis-
covery and data mining, KDD ’09, pages 389–396,
New York, NY, USA. ACM.
Iravani, P., Hall, P., Beale, D., Charron, C., and Hicks, Y.
(2011). Visual object classification by robots, using
on-line, self-supervised learning. In Computer Vision
Workshops (ICCV Workshops), 2011 IEEE Interna-
tional Conference on, pages 1092–1099.
Kasper, A., Xue, Z., and Dillmann, R. (2012). The KIT
object models database: An object model database
for object recognition, localization and manipulation
in service robotics. The International Journal of
Robotics Research (IHRR), 31(8):927–934.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). A large-
scale hierarchical multi-view rgb-d object dataset. In
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
102

Robotics and Automation (ICRA), 2011 IEEE Interna-
tional Conference on, pages 1817–1824.
Lai, K., Bo, L., Ren, X., and Fox, D. (2012). Detection-
based object labeling in 3d scenes. In Robotics and
Automation (ICRA), 2012 IEEE International Confer-
ence on, pages 1330–1337.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Mustafa, W., Pugeault, N., and Krger, N. (2013). Multi-
view object recognition using view-point invariant
shape relations and appearance information. In
Robotics and Automation (ICRA), 2013 IEEE Inter-
national Conference on.
Rodriguez, B., Peterson, G., and Agaian, S. (2007). Multi-
class classification averaging fusion for detecting
steganography. In System of Systems Engineering,
2007 IEEE International Conference on, pages 1–5.
Rusu, R. and Cousins, S. (2011). 3d is here: Point cloud li-
brary (pcl). In Robotics and Automation (ICRA), 2011
IEEE International Conference on, pages 1–4.
Schiebener, D., Ude, A., Morimotot, J., Asfour, T., and Dill-
mann, R. (2011). Segmentation and learning of un-
known objects through physical interaction. In Hu-
manoid Robots (Humanoids), 2011 11th IEEE-RAS
International Conference on, pages 500–506.
Silberman, N. and Fergus, R. (2011). Indoor scene segmen-
tation using a structured light sensor. In Computer
Vision Workshops (ICCV Workshops), 2011 IEEE In-
ternational Conference on, pages 601–608.
Szeliski, R. (2010). Computer vision: Algorithms and ap-
plications. In Computer Vision: Algorithms and Ap-
plications, page 657. Springer.
Van de Sande, K. E. A., Gevers, T., and Snoek, C. G. M.
(2010). Evaluating color descriptors for object and
scene recognition. 32(9):1582–1596.
Vapnik, V. N. (1998). Statistical Learning Theory. Wiley, 1
edition.
Vijayanarasimhan, S. and Grauman, K. (2011). Efficient re-
gion search for object detection. In Computer Vision
and Pattern Recognition (CVPR), 2011 IEEE Confer-
ence on, pages 1401–1408.
Welke, K., Issac, J., Schiebener, D., Asfour, T., and Dill-
mann, R. (2010). Autonomous acquisition of visual
multi-view object representations for object recogni-
tion on a humanoid robot. In Robotics and Automa-
tion (ICRA), 2010 IEEE International Conference on,
pages 2012–2019.
Zhou, F., Torre, F., and Hodgins, J. (2008). Aligned cluster
analysis for temporal segmentation of human motion.
In Automatic Face Gesture Recognition, 2008 IEEE
International Conference on, pages 1–7.
Zhou, X., Yu, K., Zhang, T., and Huang, T. S. (2010). Image
classification using super-vector coding of local image
descriptors. In Proceedings of the 11th European con-
ference on Computer vision: Part V, ECCV’10, pages
141–154, Berlin, Heidelberg. Springer-Verlag.
FastSelf-supervisedOn-lineTrainingforObjectRecognitionSpecificallyforRoboticApplications
103
