
A Graph-based MAP Solution for Multi-person Tracking using
Multi-camera Systems
Xiaoyan Jiang, Marco K
¨
orner, Daniel Haase and Joachim Denzler
Computer Vision Group, Friedrich Schiller University of Jena, Jena, Germany
Keywords:
Multi-person tracking, Multi-camera, Min-cost, MAP.
Abstract:
Accurate multi-person tracking under complex conditions is an important topic in computer vision with various
application scenarios such as visual surveillance. Taking into account the difficulties caused by 2D occlusions,
missing detections, and false positives, we propose a two-stage graph-based object tracking-by-detection
approach using multiple calibrated cameras. Firstly, data association is formulated into a maximum a posteriori
(MAP) problem. After transformation, we show that this single MAP problem is equivalent of finding min-cost
paths in a two-stage directed acyclic graph. The first graph aims to extract an optimal set of tracklets based on
the hypotheses on the ground plane by using both 2D appearance feature and 3D spatial distances. Subsequently,
the tracklets are linked into complete tracks in the second graph utilizing spatial and temporal distances.
This results in a global optimization over all the 2D detections obtained from multiple cameras. Finally, the
experimental results on three difficult sequences of the PETS’09 dataset with comparison to the state-of-the-art
methods show the precision and consistency of our approach.
1 INTRODUCTION
Automatic initialization and tracking of multiple, po-
tentially changing number of persons in real situa-
tions are a classic but challenging topic in computer
vision. Along with the development of object detec-
tion approaches, the tracking-by-detection framework
is adopted widely for multi-object tracking scenarios.
Given discrete detections in separate time steps, the
task afterwards is to assign the right detections to indi-
vidual targets. Hence, data association is a key issue
for multi-object tracking.
Massive works with regard to single-camera based
multi-object tracking have shown the limitation of
tracking performance (Breitenstein et al., 2011). This
is mainly due to the large portion of false positive and
missing detections caused by severe occlusions or bad
lightness conditions. By contrast, for tracking using
multiple cameras, one view can change information
with others and compensate the data scarcity. How-
ever, data association from multiple cameras occurs
an extra difficulty known as ”ghost effect” (Wu et al.,
2012) caused by triangulation of objects in 3D space.
Accordingly, we propose a global optimization ap-
proach using two graphs for multi-person tracking in
multiple calibrated camera systems. To simplify the
calculation, we adopt hypotheses on the ground plane
reconstructed from 2D detections from all available
views. Afterwards, track fragments (Tracklets) are
extracted by finding the min-cost paths in a so-called
hypothesis graph. Finally, complete tracks are gen-
erated by linking those tracklets through a so-called
tracklet graph.
1.1 Related Work
There are much effort made for efficient data associ-
ation for multi-object tracking in previous years. In
many works, tracking-by-detection was defined as a
maximum a posteriori (MAP) problem (Zhang et al.,
2008)(Berclaz et al., 2011)(Hofmann et al., 2013),
which aims to find the optimal set of trajectories with
maximum posteriori probabilities given all the obser-
vations from every video frame (Xing et al., 2009).
Step by step assignment such as particle filtering
(Breitenstein et al., 2011)(Jiang et al., 2012), kalman
filter (Satoh et al., 2004) propagated the object state
vector according to a given motion model and per-
formed data association between detections and tracks
(Breitenstein et al., 2011) when a new frame came.
However, during the period when the observation
model that was normally defined as local features
changed much due to occlusion or illumination, it was
easy for the tracker to make wrong decisions or lose
343
Jiang X., Körner M., Haase D. and Denzler J..
A Graph-based MAP Solution for Multi-person Tracking using Multi-camera Systems.
DOI: 10.5220/0004690103430350
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 343-350
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the target totally. Approaches such as Hungarian algo-
rithm (Huang et al., 2008), bipartite graph matching
(Bredereck et al., 2012), and energy minimization (An-
driyenko and Schindler, 2011) tried to find local max-
ima or minima of matching, while global information
was not considered.
Recently, many researches concerning global op-
timization schemes based on flow networks (Zhang
et al., 2008)(Wu et al., 2011)(Hofmann et al., 2013)
and graphs (Leal-Taix
´
e et al., 2012)(Collins, 2012)
have been widely presented in the literature. They
converted the multi-object tracking problem to the
searching of multiple min-cost paths in the network
or the graph. Generally, each node of the network or
the graph represents a single object’s hypothesis of
state with a specific time stamp. Trajectories of the
targets are then obtained by traversing the found min-
cost paths from the sink node to the source node (Jiang
et al., 2013). In (Berclaz et al., 2011), 2D detections
were firstly mapped into a probabilistic occupancy
map on the ground plane. Afterwards, they built a
flow network based on this probabilistic occupancy
map (Fleuret et al., 2008). Tracking was ultimately
formulated to a Integer Programming Problem with
the basic restriction that the flows arriving at any posi-
tion on the probabilistic occupancy map equal to the
ones departing from this location. Authors in (Leal-
Taix
´
e et al., 2012) constructed local graphs for each
view and then considered every pair of cameras as
a possible unit to build a higher level graph. How-
ever, this was considered to be not intuitive (Hofmann
et al., 2013). In (Wu et al., 2011), tracks were obtained
in each view by track graphs. Subsequently, the set
cover algorithm was implemented for linking among
track segments from multiple views. Henriques et al.,
modeled the merge and split activities during tracking
and removed the common restriction used in graph
based approaches that one node in the graph belongs
to one target (one-one match) at most (Henriques et al.,
2011).
In this paper, we argue that the one-one match is
necessary for multi-object tracking in multi-camera
systems. Data association among multiple cameras is
globally modeled by a two-stage graph. Additionally,
we incorporate local features to the cost function in the
first graph. Finally, we evaluate the proposed paradigm
on 3 sequences with different difficulties of tracking
from the PETS’09 dataset. The experimental results
show the accuracy and consistency of the approach, as
well as the cheap computational time it needs.
1.2 Outline and Contributions
Our two-stage graph-based multi-person tracking us-
View 001
View005
view007
reconstructed 3D detections
3D Hypotheses
Tracklets Extraction
Tracklets Linking
Figure 1: Diagram of our approach: hypothesis generation,
tracklet extraction, and tracklet linking. The left part is
the generation of
H
t
: each
o
c
j
i
has a 3D detection on the
ground plane (dashed grids). Those 3D detections whose
back projections in different image views are nearest to the
same detections in corresponding views are considered to be
identical objects.
H
t
therefore consists of the 3D detections
that have the minimum average back projection errors (solid
grids).
ing multi-camera systems approach is shown as Fig. 1
(detailed in Sec. 2). The approach contains three key
components: hypothesis generation, tracklet extrac-
tion, and tracklet linking. By contrast with the indi-
cated studies and the work in (Jiang et al., 2013) where
a two-stage graph was used as well, our contributions
are as follows:
1. We formulate the multi-object tracking problem
into two MAP problems and solve each MAP problem
by an individual graph. The graphs are conducted on
the ground plane directly, which is more straightfor-
ward than the methods that construct local graphs for
each view.
2. Local features such as appearance and size in im-
age scale of the person are integrated to the assignment
of costs for edges in the hypothesis graph.
The rest of the paper is structured as follows: for-
mulation of two MAP problems is discussed in Sec. 2.
Sec. 3 presents the details of mapping the two MAP
problems into a two-stage graph. Subsequently, quali-
tative and quantitative results on the PETS’09 dataset
with a comparison to the state-of-the-art algorithms
are stated in Sec. 4. Finally, Sec. 5 summarizes the
paper and gives an outlook of the future work.
2 TRACKING FORMULATION
After applying a detector to video frames from each
camera view, 2D detections are obtained as input to
tracking approaches. Normally, a 2D observation is
formulated as
o
c
j
i
= {x
i
,s
i
,t
i
}
indicating the position
x
, size
s
and time index
t
of detection
i
in camera
c
j
(Felzenszwalb et al., 2010). Assume that the total
number of cameras in the system is
N
,
c
j
∈ {1,··· ,N}
,
we define
O
c
j
t
= {o
c
j
i
}
to be the set of observations
from camera
c
j
at time
t
.
O
c
j
1:t
= {O
c
j
1
,··· ,O
c
j
t
}
is the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
344
set of observations until time
t
in camera
c
j
. Therefore,
known the set of observations for all cameras
O
1:t
=
{O
1
1:t
,··· ,O
C
1:t
}
, the trajectories of the targets until
time
t
, that is
T
1:t
, are searched in this huge observation
space. One step further, for multi-object tracking in
multi-camera systems in this work, data association is
a MAP problem based on 3D hypotheses H
1:t
:
T
∗
1:t
= argmax
T
1:t
P(T
1:t
|H
1:t
) , (1)
H
1:t
⊆ R
1:t
= R (∀ O
c
j
1:t
∈ O
1:t
) , (2)
with
T
∗
1:t
is the set of optimal trajectories until time
t
.
H
1:t
is a subspace of all the possible reconstructed 3D
detections
R
1:t
on ground plane accompanying local
features in visible 2D images.
R (·)
is the reconstruc-
tion function. Additionally, 3D detections belong to
identical objects are integrated into single hypotheses.
The process of generation of
H
t
is shown on the left
part of Fig. 1.
Now
T
1:t
is a subset of
H
1:t
. Recursive searching
for every possible combination is impractical because
of the computational complexity. We intend to use a
global optimization strategy to find the possible asso-
ciations that have the highest posteriori probabilities
over the whole sequences with T frames.
Denote
τ
k
= {ζ
k
,t
τ
k
,0
,t
τ
k
,1
} ∈ ϒ
is a tracklet from
frame
t
τ
k
,0
to frame
t
τ
k
,1
with a set of connected 3D lo-
cations
ζ
k
= (p
t
τ
k
,0
,··· , p
t
τ
k
,1
)
and refer to (Xing et al.,
2009), finding the optimal trajectories for multiple
targets can be written as:
T
∗
1:T
= argmax
T
1:T
P(T
1:T
|ϒ,H
1:T
) (3)
= argmax
T
1:T
P(T
1:T
|ϒ) ·P(ϒ|H
1:T
) (4)
= argmax
T
1:T
∏
k
P(T
1:T
|τ
k
)
∏
k
P(τ
k
|H
1:T
). (5)
Equ. 5 is true because of the independence of
individual tracklets.
We also follow the non-overlap constraint:
τ
k
∩ τ
l
=
/
0, ∀k 6= l, ∀τ
k
,τ
l
∈ ϒ . (6)
From Equ. 5, we can see that the MAP problem is
separated into two MAP sections: optimal tracklets
extraction and optimal tracklets linking. The two MAP
problems are equivalent of searching for the paths
with minimum costs in individual graphs accordingly,
which is discussed in the following Sec. 3.
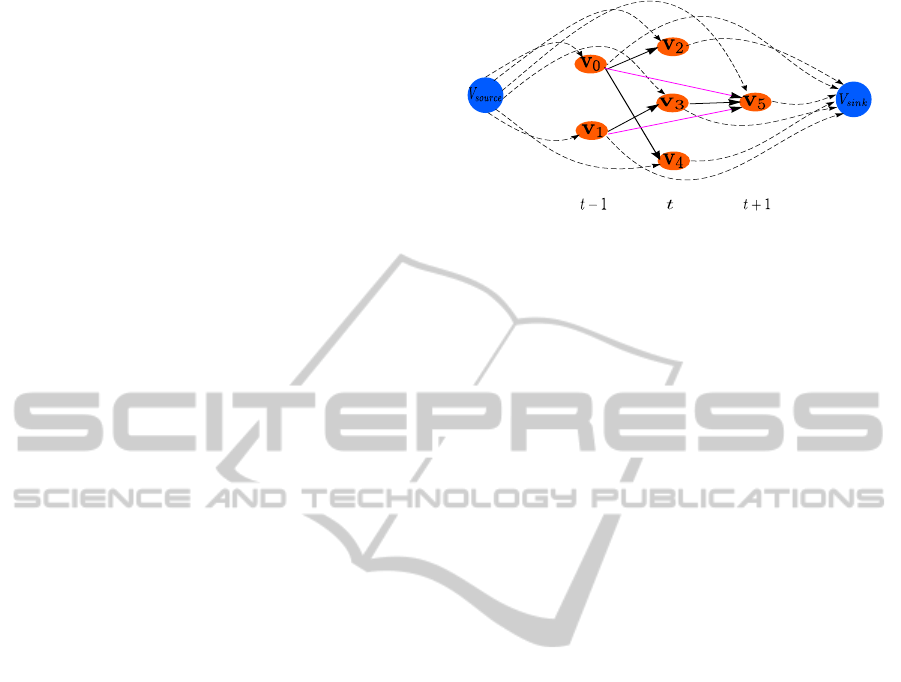
Figure 2: An exemplary hypothesis graph consists of 3 time
steps. Dashed lines from and to virtual sink node and source
node allow every possible entering and exiting position re-
spectively. Here, we also consider missing detections by
allowing edges composed by hypotheses with the time dif-
ference larger than one, which are shown by purple lines.
3 MAPPING TO A TWO-STAGE
GRAPH
In the first-stage graph, all available tracklets are ex-
tracted without knowing the number of objects as a
priori (Leal-Taix
´
e et al., 2012) or assuming entrance
and exit regions (Hofmann et al., 2013). In the second-
stage graph, tracklets are linked using temporal and
spatial distances to form complete tracks. Finally, the
trajectories are refined to generate a unique trajectory
per target.
3.1 Tracklet Extraction
We define a direct acyclic graph
G = (V,E,c)
, which
is called hypothesis graph, to extract tracklets from
H
1:T
. A vertice
v ∈ V
in
G
represents one hypothesis
h
i
t
= {p
i
t
,a
i,1:n(c
0
j
)
t
,s
i,1:n(c
0
j
)
t
} ∈ H
t
,c
0
j
∈ N
that contains
3D reconstructed position on the ground plane
p
i
t
, ap-
pearance features and sizes in 2D images from number
n(c
0
j
)
visible camera views with time stamp
t
. We in-
troduce one virtual vertice of source
v
source
along with
one virtual vertice of sink
v
sink
as shown in Fig. 2 to
start and terminate paths separately. Since the num-
ber of objects varies time by time, each vertice
v ∈ V
has probabilities incoming to
v
sink
and outgoing from
v
source
that are proportional to the corresponding frame
index t:
P
e=(v
source
,v)
= 1 −t/T , (7)
P
e=(v,v
sink
)
= t/T , (8)
where T is the total number frames.
Denote
e
∆t
i, j
= {v
t
i
,v
t+∆t
j
} ∈ E
,
∆t ∈ [1,t
max
]
is the
number of frame differences. The transition probabil-
AGraph-basedMAPSolutionforMulti-personTrackingusingMulti-cameraSystems
345

ity P
∆t
i, j
assigned to e
∆t
i, j
is defined as:
P
∆t
i, j
=
(
P
pena
· P
spat
· P
s
· P
a
, d
spat
< th
vel
,
∞ , else,
(9)
where
P
pena
= ρ
∆t
,ρ < 1
is the penalty for skipping
frames of missing detections. And
P
spat
= 1 −d
spat
/th
vel
(10)
computes the spatial affinity in 3D world coordinate
system with a maximum defined motion
th
vel
. And
d
spat
= kp
i
t
− p
j
t+∆t
k
2
is the Euclidean distance.
The average probability for size affinity from all
visible views is
P
s
= (
∑
c
j
min(s
i
,s
j
)
max(s
i
,s
j
)
)/n(c
0
j
) . (11)
The average appearance similarity from all visible
views is
P
a
= (
∑
c
j
sim(a
i
,a
j
))/n(c
0
j
) . (12)
We use Bhattacharyya coefficient to evaluate the simi-
larity of RGB histograms of the objects as appearance
features.
After the configuration and refer to (Zhang et al.,
2008), we can convert one of the MAP problem of
extracting optimal tracklets
ϒ
∗
in Equ. 5 to k-shortest
paths algorithm conducted on
G
through negative log-
arithm transformation:
ϒ
∗
= argmax
ϒ
∏
k
P(τ
k
|H
1:T
) (13)
= argmin
ϒ
∑
k
−logP(τ
k
|H
1:T
) (14)
= argmin
ϒ
∑
i, j
−logP
∆t
i, j
(15)
+ (−logP
e={v
source
,v}
) +(−log P
e={v,v
sink
}
) (16)
= argmin
ϒ
(
∑
i, j
c
i, j
+ c
en
+ c
ex
) . (17)
Thus, the costs are naturally defined as:
c
i, j
= −logP
∆t
i, j
(18)
c
en
= −logP
e=(v
source
,v)
(19)
c
ex
= −logP
e=(v,v
sink
)
. (20)
We iteratively employ Dijkstra’s shortest path algo-
rithm (Dijkstra, 1959) to find a number of relatively
min-cost paths
P = (v
sink
,v
t
P ,0
,··· ,v
t
P ,1
,v
source
)
. De-
pends on the non-overlap constraint between tracklets,
costs of edges to and from vertices in found
P
are
set to be infinite. Afterwards, tracklets are obtained
by traversing each
P
from
v
sink
to
v
source
with exiting
frame index and entering frame index.
Figure 3: An exemplary tracklet graph consists of four ver-
tices (Jiang et al., 2013). Dashed lines from and to virtual
sink vertice and source vertice allow every tracklet to start
and terminate a final track respectively. Edges only exist
between nodes with temporally consistent order.
3.2 Tracklet Linking
Since tracklets are fragments of final trajectories, we
define another directed acyclic tracklet graph
G
0
=
(V
0
,E
0
,c
0
)
to globally choose the optimal combina-
tions of tracklets. We again define a virtual source
vertice
v
0
source
and a virtual sink vertice
v
0
source
to make
all the paths found in
G
0
begin and stop by them. Each
v
0
k
∈ V
0
represents a tracklet
τ
k
= {ζ
k
,t
τ
k
,0
,t
τ
k
,1
}
with
starting and terminating frame indexes and 3D loca-
tions in between. Similarly, the entrance cost and exit
cost for v
0
k
are:
c
0
en
= t
τ
k
,0
· c
pe
, (21)
c
0
ex
= (T − t
τ
k
,1
) ·c
pe
. (22)
Here,
c
pe
is the penalty cost which is manually set.
From this we can see that the tracklets start from the
first frame and terminate in the last frame of the video
have a lower entrance/exit cost.
The cost
c
0
(k, l)
for
e
0
(k, l) = (v
0
k
,v
0
l
) ∈ E
0
is de-
fined as follows:
c
0
k,l
=
(
d
k,l
spat
· d
k,l
temp
0 < t
τ
l
,0
−t
τ
k
,1
< th
temp
∞ else .
(23)
The spatial distance
d
k,l
spat
= kζ
t
τ
l
,0
l
− ζ
t
τ
k
,1
k
k
2
(24)
is the Euclidean distance between the corresponding
terminating and starting points of τ
k
,τ
l
, and
d
k,l
temp
= t
τ
l
,0
−t
τ
k
,1
(25)
is the temporal distance between two tracklets. There-
fore, only the pairs of tracklets who have no temporal
overlap and the frame differences are smaller than a
certain threshold
th
temp
have weighted edges. Other-
wise, they are assigned by infinite costs to invalid the
specific edges. The exemplary figure of
G
0
is indicated
in Fig. 3.
Similar to Subsect. 3.1, the second MAP problem
of finding optimal trajectories from tracklets in Equ. 5
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
346

can be converted into searching for min-cost paths
conducted on G
0
:
T
∗
1:T
= argmin
T
1:T
∏
k
P(T
1:T
|τ
k
) (26)
= argmin
T
1:T
(
∑
k,l
c
0
k,l
+ c
0
en
+ c
0
ex
) . (27)
We again iteratively employ the Dijkstra’s shortest
path algorithm (Dijkstra, 1959) on
G
0
. The final tra-
jectories are consequently obtained by traversing the
linked tracklets.
3.3 Tracking Refinement
After both stages of tracklet extraction and tracklet
linking, tracklets/tracks that belong to identical objects
are recursively merged according to their beginning
and finishing frame indexes. A pair of tracklets/tracks
is judged to be identical objects when their spatial Eu-
clidean distance in the same frame index is closer than
a threshold
th
mer
for a minimum number of frames
f
mer
. And
f
mer
is proportional to the minimum length
of the pair of tracklets/tracks considered.
The missed positions within tracklets in the first
stage and the gaps between linked tracklets in the sec-
ond stage are both linearly interpolated.
4 EXPERIMENTS
4.1 Dataset
We use the public available dataset of PETS’09 (Ferry-
man and Shahrokni, 2009) to evaluate the performance
of our multi-object tracking using multi-camera sys-
tems approach. The dataset has three object-tracking
sequences with different levels of people density:
sparse (S2.L1), medium (S2.L2), and high (S2.L3).
They were recorded by different number of cameras
located in different positions. These videos are very
challenging since they contain many different types of
occlusion, for example inter-object occlusion, object-
obstacle occlusion (people are occluded by a light pole
with a big sign). The resolution in the first view is
768 ×576
. The frame rate is 7
f
/s
, for which persons
can move very fast between neighboring frames. Ad-
ditionally, we report the detection results as well for
comparison, since the tracking-by-detection paradigm
depends much on the detection performance.
4.2 Implementation
We employ the deformable part models based object
detector (Felzenszwalb et al., 2010) to get 2D detec-
tions in video frames of each camera. For PETS’09
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
0 10 20 30 40 50 60
Individual Tracking Precision − PETS’09 S2.L1
Index of Person in GroundTruth
2D Euclidean Error (pixels)
Figure 4: Boxplots of the pixel wise precisions for each
person according to the ground truth data on PETS’09 S2.L1
sequence. Most of the targets are tracked and have a local-
ization error around 10 pixels.
S2.L1, we utilize 6 out of 7 recorded cameras as the
fourth view suffers from frame rate instability (Ferry-
man and Shahrokni, 2009). The middle bottom points
of the 2D detections are adopted for the reconstruc-
tion of 3D detections on the ground plane which are
integrated into hypotheses detailed in Sec. 2.
Parameters.
The parameters configured in graph
based approaches affect a lot on the final results. In our
experiments, we set
th
mer
=
1000
. Thus, positions that
are spatially near than
1m
in 3D space are considered
to be identical. The cost for entering or exiting a path
is set to
c
pe
=
60000
, which is larger than the transition
cost to encourage the system to link all these vertices
which are associated. Furthermore, we configured
ρ
=
0.95
to make the system penalize much more to the
edges that link vertices across more number of frames.
The fastest speed a person can walk is limited to be
3.5
m
/s in the dataset, therefore th
vel
= 500.
For tracking in sequence S2.L1, we extract
100
tracklets and set the maximum frame gap to
t
max
= 4
,
since a relatively higher or lower numbers reduce the
performance. Eventually,
25
tracks are generated from
these tracklets. Also, we select
1000
tracklets, set
t
max
= 10
,
120
and
51
tracks are extracted on the video
S2.L2 and S2.L3 respectively.
4.3 Evaluation
For evaluation, we employ the multiple object track-
ing precision (MOTP) and multiple object tracking
accuracy (MOTA) (Bernardin and Stiefelhagen, 2008)
AGraph-basedMAPSolutionforMulti-personTrackingusingMulti-cameraSystems
347

Table 1: Quantitative results on PETS’09 S2.L1, S2.L2 and S2.L3 dataset. We compared MOTP, MOTA, False Positive Rate,
Miss Rate and Id switches with particle filter based tracking-by-detection (Jiang et al., 2012) (Breitenstein et al., 2011), Energy
minimization (Andriyenko and Schindler, 2011), k-shortest paths (Berclaz et al., 2011), and Probabilistic tracking (J. Yang and
Teizer, 2009).
Sequence Method MOTP MOTA False Pos. Rate Miss Rate Id switches
PETS’09 S2.L1
Jiang et al., (Jiang et al., 2012) 78.8% 60.8% n/a n/a n/a
Yang et al., (J. Yang and Teizer, 2009) 53.8% 75.9 % n/a n/a n/a
Breitenstein et al., (Breitenstein et al., 2011) 56.3% 79.7% n/a n/a n/a
Berclaz et al., (Berclaz et al., 2011) 60.0 % 66.0 % n/a n/a n/a
Andriyenko et al., (Andriyenko and Schindler, 2011) 76.1 % 81.4% n/a n/a 15
Our Approach 81.44% 77.74% 7.83% 13.91% 24
PETS’09 S2.L2
Breitenstein et al., (Breitenstein et al., 2011) 51.3% 50.0% n/a n/a n/a
Our Approach 60.14% 55.54% 0.85% 40.83% 287
PETS’09 S2.L3
Breitenstein et al., (Breitenstein et al., 2011) 52.1% 67.5% n/a n/a n/a
Our Approach 50.08% 67.71% 0.0% 29.84% 107
metrics which have become de facto standard in the
field of multi-object tracking. MOTP considers the
average error of tracked positions over the whole se-
quence. False positives, misses, and mismatches com-
pose MOTA that aims to estimate the tracker’s ability
of recognition and consistency.
The ground truth in the first view was provided by
Anton Andriyenko (Andriyenko and Schindler, 2011).
We back project our tracking results to this single view
for measurement. The assignment between tracking
and the ground truth in image coordinate system has a
threshold of
60
pixels according to the average width
of people appeared in the view. Because of the char-
acter of tracking-by-detection framework and in order
to have a fair evaluation on tracking, we provide the
false positive rate and the false negative rate for the de-
tection by removing objects’ Id numbers in the ground
truth data. The detector we use has a distinct perfor-
mance of different videos in the first view: the false
positive rate is
0.05
,
0.01
, and
0.0
, while the missing
rate is
0.1
,
0.6
, and
0.5
for S2.L1, S2.L2, and S2.L3
respectively.
Tab. 1 shows the quantitative results of our ap-
proach compared to the state-of-the-art methods. From
the results of S2.L1, it can be seen that we have the
highest MOTP, which indicates the precision of tar-
get localization of our method. MOTA for S2.L1 is
also comparable with others. Additionally, the pixel
wise precisions for individual persons are shown as
boxplots in Fig. 4. We can state that the average bias
of the tracked objects’ localization is approximately
10 pixels, which is probability the same error between
different ground truth data labeled by diverse persons.
Besides, our approach has the highest MOTP and
MOTA on S2.L2 sequence, which is partially because
of the allowance of linking between hypotheses with
number of frame gaps in the first graph. This benefit
is also obvious when comparing detection to track-
ing with their missing rates. For S2.L3, our tracking
performance is also comparable with the work that
reported their results.
Therefore, from Tab. 1, we can see that our method
has comparable or relatively better results for the three
sequences on PETS’09. Although the numbers of Id
switches are slightly higher, the tracker keeps track-
ing after switching. This happens when people are
merging and splitting which cause wrong relatively
low costs.
Qualitative results of PETS’09 S2.L1, S2.L2 and
S2.L3 from different number of cameras are shown
in Fig. 5. We visualize the trajectories from tracking
results and obtain corresponding rectangles of each
frame by finding the nearest 2D detections conducted
on the frame. From the figure we can see that our
approach is able to consistently track people who have
already been occluded by others or the obstacle in the
scene for a long time. In the third view of S2.L1 where
the scenario is under bad lightness condition, we can
still recognize and recover the trajectories using the
data from other views, which indicate the benefit of
utilization of multiple cameras.
4.4 Complexity and Runtime
The entire system was realized in c++. Our approach
has a complexity of
O(k · (n log n + m))
, where
n
is
the number of vertices,
m
is the number of edges, and
k
is the number of min-cost paths to be found in the
respective graph. For 6 cameras with
795
frames each
in S2.L1, it needs approximately
1.5
minutes for the
extraction of 100 tracklets from a
1.5 ×10
4
node hy-
pothesis graph and linking of final 25 tracks from the
tracklet graph. Similar runtime is needed for the other
two sequences we conducted. All measurements were
conducted on a standard desktop computer with an
Intel
R
Core
TM
i5-760 CPU (2.80GHz).
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
348

Figure 5: Qualitative results of our approach on PETS’09 S2.L1, S2.L2, and S2.L3 sequences. First four rows are for S2.L1
from four cameras separately. The fifth row shows the results from S2.L2 in the first view and results for the first view of S2.L3
are shown in the sixth row. Different colors and shapes indicate the different identities of the targets. The trajectories are shown
by linking previous tracking results for up to 20 frames. Rectangles of the tracks are obtained by back projecting the tracking
results to individual views and finding the nearest 2D detections. Therefore, the trajectories without rectangles denote the
frames where existing missing detections while the tracker can still keep tracking.
AGraph-basedMAPSolutionforMulti-personTrackingusingMulti-cameraSystems
349

5 CONCLUSIONS AND
OUTLOOK
In this work, we firstly had a review on the recent stud-
ies of multi-object tracking using a single camera or
multiple cameras and discussed the recent researches
for global optimization based on flow networks or
graphs. After the formulation of data association into
two MAP problems. we proposed a two-stage graph-
based multi-person multi-camera tracking approach.
Firstly, a hypothesis graph was constructed to extract
possible associated tracklets from reconstructed 3D
detections. While most of the papers considered global
features only, we incorporated local features such as
appearance, size into the computation of costs for the
edges in the hypothesis graph. Importantly, the hy-
potheses for tracking on the ground plane were arose
from the reconstructions of 2D detections from each
view at the same time step. Those reconstructed 3D de-
tections who were regarded to be the same object were
replaced by the one with the minimum back projection
error. Consequently, the task of the second graph was
to link tracklets into complete tracks. For this sake,
the cost function accordingly took temporal and spa-
tial distances into account. All in all, this framework
is general for multi-object tracking in multi-camera
systems.
From our experiments, we conclude that it is im-
portant to have the optimal outcome from the first
step of hypothesis generation for multi-object track-
ing in multi-camera systems. Due to the impact of
calibration and object detection errors, the precision
of recognizing of identical objects can be improved
by more restrict constraints. Hence, in the future, we
would like to focus on the modeling of calibration and
detection errors and incorporating them into the frame-
work. Incremental learning might be able to refine
the modeling as more and more frames are processed.
Additionally, the tracklet linking stage could consider
more information such as histogram of motion in the
cost function to reduce the false positive rate and the
number of Id switches.
REFERENCES
Andriyenko, A. and Schindler, K. (2011). Multi-target track-
ing by continuous energy minimization. In CVPR,
pages 1265–1272.
Berclaz, J., Fleuret, F., Turetken, E., and Fua, P. (2011).
Multiple object tracking using k-shortest paths opti-
mization. TPAMI, 33:1806–1819.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating multi-
ple object tracking performance: The clear mot metrics.
EJIVP, 246309.
Bredereck, M., Jiang, X., K
¨
orner, M., and Denzler, J. (2012).
Data association for multi-object tracking-by-detection
in multi-camera networks. In ICDSC.
Breitenstein, M. D., Reichlin, F., Leibe, B., Koller-Meier, E.,
and Gool, L. V. (2011). Online muti-person tracking-
by-detection from a single, uncalibrated camera. PAMI,
33:1820 – 1833.
Collins, R. T. (2012). Multitarget data association with
higher-order motion models. In CVPR.
Dijkstra, E. W. (1959). A note on two problems in connexion
with graphs. NUMERISCHE MATHEMATIK, 1:269–
271.
Felzenszwalb, P., Girshick, R., and McAllester, D. (2010).
Cascade object detection with deformable part models.
In CVPR.
Ferryman, J. and Shahrokni, A. (2009). Pets2009: Dataset
and challenge. In 2009 Twelfth IEEE International
Workshop on Performance Evaluation of Tracking and
Surveillance (PETS-Winter).
Fleuret, F., Berclaz, J., Lengagne, R., and Fua, P. (2008).
Multi-camera people tracking with a probabilistic oc-
cupancy map. TPAMI, 30:267–282.
Henriques, J. F., Caseiro, R., and Batista, J. (2011). Globally
optimal solution to multi-object tracking with merged
measurements. In ICCV.
Hofmann, M., Wolf, D., and Rigoll, G. (2013). Hypergraphs
for joint multi-view reconstruction and multi-object
tracking. In CVPR.
Huang, C., Wu, B., and Nevatia, R. (2008). Robust ob-
ject tracking by hierarchical association of detection
responses. In ECCV, pages 788–801.
J. Yang, Z. Shi, P. V. and Teizer, J. (2009). Probabilistic mul-
tiple people tracking through complex situations. In
IEEE Workshop Performance Evaluation of Tracking
and Surveillance.
Jiang, X., Haase, D., K
¨
orner, M., Bothe, W., and Denzler,
J. (2013). Accurate 3d multi-marker tracking in x-ray
cardiac sequences using a two-stage graph modeling
approach. In the 15th Conference on Computer Analy-
sis of Images and Patterns (CAIP).
Jiang, X., Rodner, E., and Denzler, J. (2012). Multi-
person tracking-by-detection based on calibrated multi-
camera systems. In ICCVG, pages 743–751.
Leal-Taix
´
e, L., Pons-Moll, G., and Rosenhahn, B. (2012).
Branch-and-price global optimization for multi-view
multi-target tracking. In CVPR, pages 1987–1994.
Satoh, Y., Okatani, T., and Deguchi, K. (2004). A color-
based tracking by kalman particle filter. In ICPR, pages
502–505.
Wu, Z., Kunz, T. H., and Betke, M. (2011). Efficient track
linking methods for track graphs using network-flow
and set-cover techniques. In CVPR, pages 1185–1192.
Wu, Z., Thangali, A., Sclaroff, S., and Betke, M. (2012).
Coupling detection and data association for multiple
object tracking. In CVPR.
Xing, J., Ai, H., and Lao, S. (2009). Multi-object track-
ing through occlusions by local tracklets filtering and
global tracklets association with detection responses.
In CVPR.
Zhang, L., Li, Y., and Nevatia, R. (2008). Global data
association for multi-object tracking using network
flows. In CVPR.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
350
