
Subtasks of Unconstrained Face Recognition
Joel Z. Leibo, Qianli Liao and Tomaso Poggio
Center for Brains, Minds and Machines, McGovern Institute for Brain Research, MIT, Cambridge MA 02139, U.S.A.
Keywords:
Invariance, Face Identification, Same-different Matching, Labeled Faces in the Wild, Synthetic Data.
Abstract:
Unconstrained face recognition remains a challenging computer vision problem despite recent exceptionally
high results (∼ 95% accuracy) on the current gold standard evaluation dataset: Labeled Faces in the Wild
(LFW) (Huang et al., 2008; Chen et al., 2013). We offer a decomposition of the unconstrained problem into
subtasks based on the idea that invariance to identity-preserving transformations is the crux of recognition.
Each of the subtasks in the Subtasks of Unconstrained Face Recognition (SUFR) challenge consists of a
same-different face-matching problem on a set of 400 individual synthetic faces rendered so as to isolate a
specific transformation or set of transformations. We characterized the performance of 9 different models
(8 previously published) on each of the subtasks. One notable finding was that the HMAX-C2 feature was
not nearly as clutter-resistant as had been suggested by previous publications (Leibo et al., 2010; Pinto et al.,
2011). Next we considered LFW and argued that it is too easy of a task to continue to be regarded as a measure
of progress on unconstrained face recognition. In particular, strong performance on LFW requires almost no
invariance, yet it cannot be considered a fair approximation of the outcome of a detection→alignment pipeline
since it does not contain the kinds of variability that realistic alignment systems produce when working on
non-frontal faces. We offer a new, more difficult, natural image dataset: SUFR-in-the-Wild (SUFR-W), which
we created using a protocol that was similar to LFW, but with a few differences designed to produce more need
for transformation invariance. We present baseline results for eight different face recognition systems on the
new dataset and argue that it is time to retire LFW and move on to more difficult evaluations for unconstrained
face recognition.
1 INTRODUCTION
Current approaches to face recognition perform
best on well-posed photographs taken for identifi-
cation purposes, e.g., passport photos. However,
in the real world, images of faces undergo many
transformations—including aging, pose, illumina-
tion, expression, and many more. Not only do trans-
formations degrade the performance of current algo-
rithms, but in many cases they are known to lead to
their catastrophic failure (Pinto et al., 2008a; Grother
et al., 2010).
The computer vision and biometrics communities
have responded to this challenge by shifting their fo-
cus to unconstrained benchmark datasets, of which
Labeled Faces in the Wild (LFW) is generally con-
sidered to be the gold standard (Huang et al., 2008).
LFW and similar datasets (e.g., PubFig83) consist of
publicly available images of celebrities gathered from
the internet and thus contain considerable variability.
The state-of-the-art on LFW has steadily im-
proved in recent years to the point that it now ar-
guably rivals human performance (on same-different
matching of unfamiliar faces). At the time of writ-
ing, the best LFW performance is above 95% (Chen
et al., 2013). However, we argue in this paper, there
are several reasons that a declaration of victory over
unconstrained face recognition remains premature.
1. The strong performance achieved on Labeled
Faces in the Wild does not transfer to another, os-
tensibly quite similar, dataset we gathered.
2. The failure modes of state-of-the-art algorithms
remain unclear. Moreover, when an algorithm
does not perform well on an unconstrained test
like LFW, it is not clear what aspect of the task
is responsible.
3. Another goal is to understand the brain’s solution
to the unconstrained face recognition problem. In
the Visual Psychophysics and Cognitive Neuro-
science literature there is a wealth of available in-
formation concerning the robustness of human vi-
sion with respect to specific transformations, e.g,
(Troje and B¨ulthoff, 1996; Braje et al., 1998).
113
Z. Leibo J., Liao Q. and Poggio T..
Subtasks of Unconstrained Face Recognition.
DOI: 10.5220/0004694201130121
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 113-121
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
This data is typically gathered in highly controlled
laboratory settings with one transformation varied
at a time. Unless artificial systems are tested in
comparable settings then there is no way to con-
nect to this large body of previous work.
In this paper, we argue that in order to make fur-
ther progress, it is necessary to simultaneously con-
sider unconstrained face recognition along with its
component subtasks. To that end, we contribute a
collection of synthetic datasets (produced using 3D
graphics) which, taken together, constitute a (partial)
decomposition of unconstrained face recognition into
its component subtasks. Our parsing of the full prob-
lem into subtasks is based on the premise that trans-
formation invariance is the crux of recognition (Pog-
gio et al., 2012; DiCarlo et al., 2012). We also gath-
ered a new unconstrained dataset, similar to LFW
(publicly available images on the Internet), but ap-
parently more difficult. The entire collection of new
datasets is available to researchers
1
.
2 SUBTASKS
Our decomposition of unconstrained face recognition
into subtasks is based on the idea that invariance to
transformations is the main computational problem
of recognition. The subtasks can be used to test
face recognition systems. Unlike LFW, and similar
datasets for which only a single accuracy score is
measured, testing on all the subtasks gives a detailed
analysis in terms of which transformations a system
handles well and which cause it to fail.
The Subtasks of Unconstrained Face Recognition
(SUFR) challenge is a collection of datasets which we
call subtasks. Each subtask was designed to test spe-
cific aspects of the unconstrained face pair-matching
(same-different) task. There are 400 individuals in
each subtask. The total numbers of images range from
2, 000 for some of the smaller subtasks, to 10, 000 for
some of the larger interaction tasks (tests with two
transformations applied simultaneously). Each image
is 512×512 pixels and in color. Since our goal in cre-
ating these datasets was precise control of transforma-
tion parameters, we employed 3D graphics software
to synthesize the images. In section 3.1 we also de-
scribe a separate component of the challenge which
uses natural images: SUFR-W.
The 400 textured head models were randomly
generated using FaceGen (Singular Inversions, 2003)
and rendered onto a transparent background with
Blender (Blender.org, 2013) using the CYCLES ray
1
It can be downloaded from http://cbmm.mit.edu/.
tracing engine. Most of the transformations required
3D information, e.g., rotation in depth and simulated
movement of the illumination source. These transfor-
mations were applied with Blender. In other cases,
images were transformed by explicitly specifying an
affine matrix and using Matlab’s image processing
toolbox.
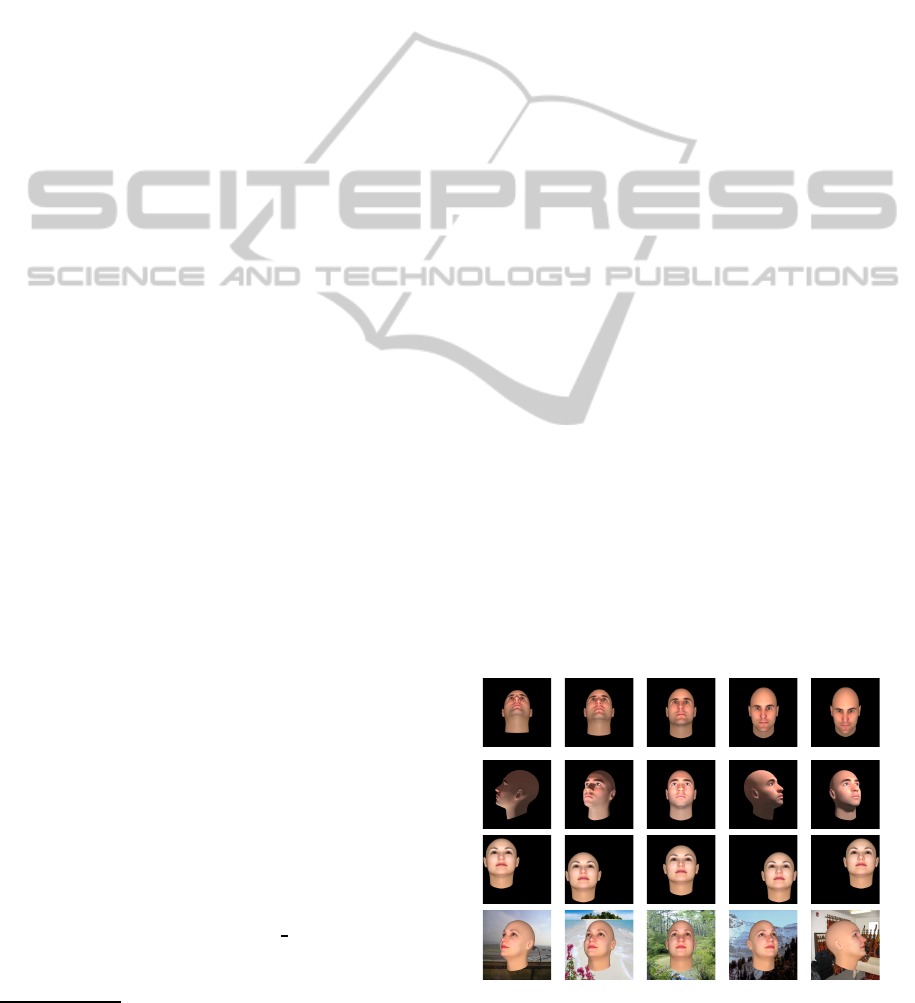
The SUFR challenge can be divided up in differ-
ent ways. The “core” of the challenge is a set of
six datasets which test transformation invariance di-
rectly. They consist of images of faces on a uniform
black background. Another set of subtasks are con-
cerned with transformation invariance in the presence
of backgroundclutter. Each image has a different ran-
domly chosen natural scene or semi-structured ran-
dom noise image in the background. Several sub-
tasks are suitable for studying robustnessto occlusion.
Strong performanceon these tasks requires invariance
to whether or not a face is wearing sunglasses. Fi-
nally, there are also interaction tests. It is possible
for a face recognition system to employ methods that
successfully ensure invariance to any single transfor-
mation, but fail in combination. The interaction tests
could quickly diagnose such issues. The full list of
subtask datasets and benchmark results (without the
random noise background sets for space reasons) is in
table 1.
Testing face recognition algorithms on all the
SUFR datasets yields a lot of information. However,
it should be noted that SUFR is still only a partial
decomposition of the unconstrained face recognition
problem. In general, it would have to include trans-
formations that are quite difficult to parametrize, e.g.,
facial expressions and aging. Thus our parsing of the
full task remains somewhat incomplete since it only
contains the transformations which we were able to
simulate using 3D graphics software. Nevertheless,
the SUFR benchmark contains many tests which are
quite difficult for recent face recognition systems.
Figure 1: Example images.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
114

2.1 Performance of Benchmark Face
Recognition Models
The intended use of the SUFR datasets is same-
different matching of unfamiliar individuals (never
seen during the training phase). This problem is
sometimes called face-verification. It is identical to
the standard procedure used with LFW. Unless men-
tioned otherwise, each test was performed by training
a Support Vector Machine (SVM) using the difference
between the feature representations of the two images
to be compared. 4000 image pairs were used for train-
ing and 4000 independent pairs for testing.
The SUFR benchmark results in table 1 include
all nine models we tested. However, some care in in-
terpretation is needed since they are not all directly
comparable with one another. For example, some
entries in table 1 correspond to testing concatenated
vectors of local descriptors for their translation invari-
ance. Obviously, they are not translation invariant—
they were never intended to be.
2.1.1 Local Descriptors
Many computer vision features (e.g. Histograms
of Oriented Gradients (HOG) and Local Binary
Patterns (LBP)) are extracted independently on a
block-by-block basis. That is, first each image is
subdivided into many relatively small blocks, then
each is fed into a “feature extraction blackbox” which
returns a vector of feature values. Vectors from all
the blocks are concatenated to represent the entire
image. Within this category, we tested Histograms
of Oriented Gradients (HOG), Local Binary Patterns
(LBP), and Local Phase Quantization (LPQ). Note:
Many of these features could be used as components
of Global methods using bag of words or spatial
pyramid approaches. We list them as “local” since
their particular variant tested here was local.
Histograms of Oriented Gradients (HOG)
Originally proposed by Dalal and Triggs (2005), our
experiments are based on the variant proposed by
Felzenszwalb et al. (2010). The image was divided
into blocks. For each one, a histogram of gradient
orientations for each pixel is accumulated. The
histogram of each block is then normalized with
respect to neighboring blocks. We used an open
source implementation from the VLFeat library
(Vedaldi and Fulkerson, 2008).
Local Binary Patterns (LBP)
LBP (Ojala et al., 2002) and its generalizations
to three-patch-LBP, four-patch-LBP and Local
Quantized Patterns have been shown to be powerful
representations for face recognition with LFW (Guil-
laumin et al., 2009; Wolf et al., 2011; Hussain et al.,
2012). These methods work by thresholding the pixel
intensities in a small region surrounding a central
pixel and treating the resulting pattern as a binary
number. As in HOG, histograms of local descriptors
are accumulated in non-overlapping blocks. We
used the implementation from VLFeat (Vedaldi and
Fulkerson, 2008).
Local Phase Quantization (LPQ)
LPQ (Ojansivu and Heikkil¨a, 2008) is a blur-
insensitive feature computed by quantizing the
Fourier transform phase in local neighborhoods. Vari-
ants of LPQ were previously shown to outperform
LBP on several datasets including LFW (Chan et al.,
2013). We used an implementation provided by the
author.
2.1.2 Features Inspired by Primary Visual
Cortex
Hierarchical Model and X — C1 (HMAX-C1)
HMAX is a (partial) model of the primate ventral
stream (Riesenhuber and Poggio, 1999), the part
of cortex that is believed to be involved in object
recognition. The elements of its C1 layer model
complex cells in primary visual cortex (V1). We
used the open source “CVPR06” implementation of
HMAX which is distributed with the CNS simulation
system (Mutch et al., 2010).
V1-like Model (V1-like)
V1-like features are another family of low-level fea-
tures intended to model the output of primary visual
cortex (Pinto et al., 2008a). Variants of V1-like fea-
tures were shown to be effective in various object and
face recognition tasks (Pinto et al., 2008a, 2009). In
all of our experiments, we used V1-like(A)—the best
performing variant according to Pinto et al. (2009).
We used an implementation provided by the author.
Following their testing procedure, we reduced the di-
mensionality of the V1-like features by PCA
2
(Pinto
et al., 2008b).
2.1.3 Global Features
Hierarchical Model and X — C2 (HMAX-C2)
Another layer of HMAX. It was developed as a model
for regions involved in later stages of ventral stream
visual processing beyond primary visual cortex. We
used the open source “PNAS” implementation of
2
Due to the large size of the features (86,400 per image)
we only used 1,000 random training samples (out of 4,000)
to compute principal components.
SubtasksofUnconstrainedFaceRecognition
115

HMAX from CNS (Mutch et al., 2010). This version
corresponds to the “C2b” layer of Serre et al. (2007).
Scale-invariant Feature Transform + Bag of Words or
Spatial Pyramid (SIFT-BoW and SIFT-Pyr)
The Scale-invariant feature transform (or SIFT)
(Lowe, 1999) is performed on a point-by-point ba-
sis. Canonically, 128 dimensional features can be ex-
tracted from a keypoint, but one cannot directly use
it for classification. A common practice is to use a
Bag-of-words (BoW) or spatial pyramid representa-
tion (Pyr), which treats each keypoint as a visual word
and ignore its spacial location in the whole image
(BoW) or each block (Pyr). A histogram of all visual
words is computed as the final features. We used k-
means clustering to quantize these visual words into
1024 clusters producing a final feature size of 1024
(BoW) or N*1024 (Pyr), where N is the number of
blocks in the spatial pyramid. The open source imple-
mentation is provided by van de Sande et al. (2011).
2.1.4 An Alignment-based System
SIFT-RANSAC→Warping→HOG Features
We developed and tested the following pipeline—
SIFT-RANSAC→Warping→HOG features. The idea
is: given a pair of test images, warp the first image,
A, to match the other image, B. If the warping is suc-
cessful then A could be aligned with B and substantial
affine transformations discounted. Since many other
transformations are approximately affine (e.g. small
yaw rotations) it is possible that this approach may
also be successful in those cases. We implemented
the common SIFT-RANSAC algorithm that is usu-
ally used for panoramic photo stitching. Then we ex-
tracted HOG features from image B and the warped
image A. After that, we followed the same testing pro-
cess as with the HOG features.
2.1.5 The SUFR Benchmark Clusters Models by
Type
We used multidimensional scaling (MDS) to visual-
ize the similarities between the pattern of results ob-
tained with each feature set (fig. 2). Distance between
points in the scatter plot corresponds to the Euclidean
distance between each model’s vector of accuracy val-
ues on the “core SUFR” subset: all single transforma-
tion subtasks with a uniform background. It shows
that the feature types can be distinguished from one
another by their pattern of SUFR results. Unsur-
prisingly, one MDS dimension appears to represent
“globalness”, HMAX-C2, the two SIFT-based mod-
els, and the RANSAC-HOG system are located at its
extremes. The more local models inspired by primary
RANSAC+HOG
HOG
C1
V1-like
SIFT-Pyr
SIFT-BoW
C2
LPQ
LBP
Figure 2: Multidimensional scaling based on the vector
of performances on cure SUFR. Distance in the scatter
point corresponds to the Euclidean distance between each
model’s vector of accuracies on the core SUFR tests.
visual cortex: HMAX-C1 and Pinto’s V1-like model
also cluster closer to one another than to other mod-
els, thoughinterestingly, they are farther apart than we
expected. A more surprising finding was that HOG,
LPQ, and LBP all had quite similar patterns of results
on the SUFR benchmark and all were relatively differ-
ent from the local biologically-inspired features. As
expected, the RANSAC-HOG system is isolated and
far from other features. It works very well for all the
affine transformations (even with background). But
for non-affine transformations, it is fairly unstable and
largely compromised, the same reason it is not appli-
cable to real-world data.
2.1.6 Disrupting Translation Invariance with
Cluttered Backgrounds
HMAX-C2 and SIFT-Bag-of-Words performed
nearly perfectly on the tests of translation invariance
without background clutter. However, both failed the
same test in the presence of natural image clutter.
This result was surprising since there are at least
two previous reports in the literature that HMAX-C2
was translation-invariant on tasks with cluttered
backgrounds (Leibo et al., 2010; Pinto et al., 2011).
Leibo et al. (2010) tested translation-invariantface
pair-matching with and without background clutter.
They reported that there was very little loss of accu-
racy due to clutter. However, it is likely that the clutter
they used was too noise-like and not similar enough
to the target class (natural faces). We observed that
random semi-structured noise backgrounds do not
have much effect on translation invariance for either
HMAX-C2 or SIFT-BoW (fig. 3).
Pinto et al. (2011) followed a similar approach to
ours. They also generated datasets of transforming
objects using 3D graphics. However, they studied a
basic level categorization task: cars vs. airplanes.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
116

They found that HMAX C2’s performance was un-
affected by translation over natural clutter. It is pos-
sible that this result was due to a difference between
subordinate level face matching and their basic level
task. But there were many other differences between
the two studies that may also have been responsible.
We also investigated a pure background-invariance
task which was trivially easy for the local features
and found that C2 and the SIFT-BoW method were
quite disrupted by very small amounts of clutter—
even when no translation invariance is necessary (fig.
4).
50
60
70
80
90
100
50
60
70
80
90
100
x
-
x
-
x
-
C2 SIFT-BoW
Figure 3: Top diagrams: Accuracy curves of C2 and
SIFT-BoW over different transformations and background
types (Blue: translation, Green: translation + scaling,
Red:translation + yaw rotation). Y axis is verification ac-
curacy in percentage. X axis is background type. 1 = no
background. 2 = noise. 3 = natural images. Bottom row
shows the example images used for the three curves, re-
spectively.
−40 −20 0 20 40 60 80 100 120
55
60
65
70
75
80
85
90
95
100
Background Size
Verification Accuracy (by SVM)
lbp
lpq
hog
C1
sift
C2
Figure 4: Performances of different models over differ-
ent background sizes. It shows that global features (e.g.,
C2, SIFT) are much less tolerant of clutters, adding even a
small amount of background lower their performances sig-
nificantly.
3 FACE RECOGNITION IN THE
WILD
If you accept the premise that transformation invari-
ance is the crux of visual recognition then perfor-
mance on the subtasks ought to be a good predictor
of performance on the unconstrained task. However,
if the meaning of “the unconstrained task” is “Labeled
Faces in the Wild”, this turns out not to be true. Fig-
ure 6 shows that many of the models we tested actu-
ally perform better on LFW than they do on most of
the subtasks. How can this be?
It turns out that LFW doesn’t really require sub-
stantial invariance to many of the transformations that
the SUFR datasets were designed to test. The cre-
ators of LFW filtered its set of candidate images by
the Viola-Jones face detector (Viola and Jones, 2004)
which, for the most part, only detects nearly frontal
faces. Thus LFW contains hardly any rotation in
depth. Also, the faces are all centered and roughly
the same size so translation and scale invariance are
also unnecessary.
3.1 SUFR in the Wild (SUFR-W)
In order to address these shortcomings of LFW, we
created a new “unconstrained” natural image dataset
using a very similar protocol to the one used by the
creators of LFW. The new dataset, which we call
SUFR-in-the-Wild (SUFR-W), is similar in size to
LFW. It contains 13,661 images, slightly more than
LFW’s 13,233. While LFW contains a small number
of images per person and a large number of people
(5749 individuals), SUFR-W contains a much larger
number of images of exactly 400 people (picked for
uniformity with the synthetic SUFR datasets). See
figure 5 for example SUFR-W images.
We gathered the images for SUFR-W using
Google images. In order to avoid the same Viola-
Jones filtering issue that prevented LFW from con-
taining non-frontal faces, we did the following: First
we manually eliminated all the images for each name
that did not have a single isolated face, were not the
correct person, or were too low resolution. Next, to
prevent the dataset from being too difficult, we ran
the Zhu and Ramanan (2012) face detection and land-
mark localization method. This method works partic-
ularly well with rotations in depth. It managed to de-
tect all but ∼ 30 of the candidate faces (which we then
removed). To introduce some additional difficulty,
but not too much, we allowed the Zhu and Ramanan
(2012) system to attempt to align the images based
on the landmarks it localized. However, it frequently
failed to achieve a good alignment. Many of the faces
SubtasksofUnconstrainedFaceRecognition
117
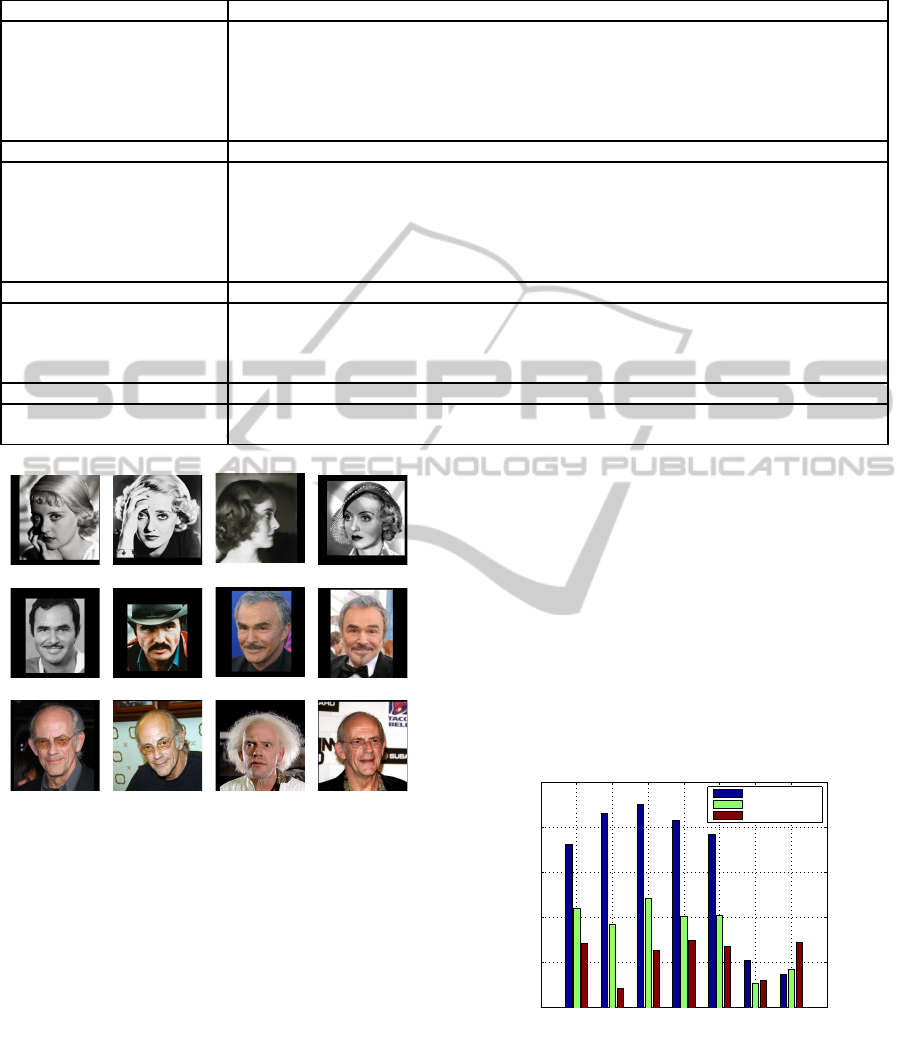
Table 1: Subtasks of Unconstrained Face Recognition benchmark results (% correct).
Core C1 C2 HOG LBP LPQ SIFT-BoW SIFT-Pyr V1-like RANSAC+HOG
translation 52.8 99.6 53.0 55.0 55.9 98.0 89.6 69.6 93.7
scaling 61.7 87.5 61.7 61.0 62.7 64.7 63.7 55.3 80.5
in-plane rotation 61.4 85.9 71.3 79.3 71.2 77.9 71.5 63.1 99.4
pitch rotation 79.5 90.0 79.8 84.1 76.5 79.7 75.9 70.5 76.2
yaw rotation 57.1 70.8 58.6 64.8 60.3 67.1 63.1 59.8 55.1
illumination 96.0 94.6 93.2 92.5 87.2 93.1 95.5 96.3 71.7
Core + clutter C1 C2 HOG LBP LPQ SIFT-BoW SIFT-Pyr V1-like RANSAC+HOG
translation 55.5 57.7 57.1 57.6 57.3 61.6 55.5 49.6 97.1
scaling 49.6 48.4 53.3 53.5 52.6 51.0 52.2 49.4 89.5
in-plane rotation 54.6 50.7 54.5 60.2 55.7 51.3 51.0 53.2 96.6
pitch rotation 54.1 52.5 54.5 60.1 55.9 51.0 52.7 55.4 68.2
yaw rotation 49.6 48.5 50.7 52.2 51.4 49.7 49.8 50.5 52.7
illumination 56.0 49.6 67.0 62.9 60.6 50.1 50.6 58.2 54.7
Interactions C1 C2 HOG LBP LPQ SIFT-BoW SIFT-Pyr V1-like RANSAC+HOG
translation + scaling 53.5 96.5 53.0 53.2 53.3 77.7 67.6 51.5 84.5
translation + in-plane rotation 53.4 87.1 53.3 53.3 52.5 79.2 57.6 51.5 91.8
translation + yaw rotation 50.5 62.7 51.3 51.2 51.3 62.0 52.1 51.3 51.7
yaw rotation + illumination 56.5 58.5 52.6 54.2 54.9 59.3 57.1 57.4 52.7
Occlusion C1 C2 HOG LBP LPQ SIFT-BoW SIFT-Pyr V1-like RANSAC+HOG
sunglasses + pitch rotation 76.6 69.5 79.7 84.5 77.6 75.8 73.5 64.2 63.6
sunglasses + yaw rotation 57.0 50.0 59.8 69.3 61.3 67.9 63.6 59.5 54.8
Figure 5: Example images in the SUFR-in-the-Wild dataset
(SUFR-W). Top row: Bette Davis. Middle row: Burt
Reynolds. Bottom row: Christopher Lloyd. The degree of
alignment shown here is typical for the dataset. Profile faces
as in the top row are rare.
(but not too many) remain clearly misaligned. Since
we performed no further alignment, all these images
are still misaligned in the final dataset.
SUFR-W contains none of the same individuals
as LFW so it is straightforward to conduct experi-
ments that train on one dataset and test on the other.
As an unintended consequence of this, since so many
celebrities are already in LFW, we had to look farther
afield to find the individuals for SUFR-W. Many of
them are actors and politicians who were active in the
first half of the 20th century. Since these individuals
are older today, we found that SUFR-W has consid-
erably more variation in age than LFW. Of course,
one unfortunate bias is that age is very clearly corre-
lated with photography style (e.g. ‘younger’ implies
‘probably black and white’). This is not a problem for
the same-differentmatching task; though it does mean
that successful algorithms will need to be reasonably
tolerant of “the aging transformation”.
While the systems we tested are not quite at the
state-of-the-art, it is clear from the difference in per-
formance between LFW and SUFR-W that the latter
is a considerably more difficult dataset (fig. 6). At
the same time, it is also clear that it is not so difficult
that it cannot be used productively to guide future re-
search.
55
60
65
70
75
80
Accuracy (Percentage)
C1 V1like HOG LBP LPQ C2 SIFT−BoW
LFW−a Close Crop
LFW
SUFR−W
Figure 6: Results on natural image tasks (LFW-a closely
cropped, LFW original and SUFR-W). The x axis is type
of features. All the results are from our experiments, ex-
cept that the LFW V1like is from Pinto et al. (2008b) and
LFW-a close crop V1like is reported in Pinto et al. (2009).
Our attempts to replicate these were stymied by a lack of
computational resources
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
118

Figure 7: Top: Three typical images from LFW. Bottom:
The same three images in LFW-a.
3.2 On the use of LFW-a
Upon seeing figure 7, a colleague of ours remarked
that the images in the bottom row are the ones for the
task of face recognition. Depending on what part of
the community you come from, that statement will
either be obviously true or completely absurd.
Of the 123 papers indexed by Google Scholar that
report results on LFW, at least 95 of them actually
used a different, even more tightly aligned version
3
.
Most of these paper (at least 58 of them) used LFW-a,
a version of LFW which was very finely aligned with
a commercial software package (Wolf et al., 2011).
The vast majority of papers using LFW-a crop all the
images to an extremely tight, fixed, bounding box like
the one shown in 7.
Even the relatively simple features we tested here
are improved by up to 10% by using (cropped) LFW-
a (fig. 6). Similar results have been reported before
(e.g. Wolf et al. (2011)).
The argument in favor of taking results on the
tightly cropped LFW-a test as a proxy for perfor-
mance on unconstrained face recognition appeals to
the detection → alignment → recognition (DAR)
pipeline. In that framework, recognition is only the
last step in a process through which transformations
have already been discounted. It is acceptable to fo-
cus on a dataset containing hardly any transforma-
tions since normalizing those was already supposed
to have been accomplished at earlier stages. However,
there are several reasons not to take this argument at
face value.
1. At best, the DAR framework guarantees that
recognition systems will receive data that is as well-
normalized as detection and alignment systems can
deliver within application demands (e.g. processing
time or cost). The creators of LFW referred to this
3
There were 9 papers that reported results on both and
23 papers for which we were unable to determine which
dataset was used.
issue when they wrote
“every face image in our database is the out-
put of the Viola-Jones face detection algorithm. The
motivation for this is as follows. If one can develop
a face alignment algorithm (and subsequent recogni-
tion algorithm) that works directly on LFW, then it is
likely to also work well in an end-to-end system that
uses the Viola-Jones detector as a first step.” (Huang
et al., 2008).
This view of LFW is very conservative with re-
spect to its implications for the full unconstrained face
recognition problem. In this vein, the honest interpre-
tation of the fact that the state-of-the-art on LFW-a
is now 95% is: Consider the algorithm that first runs
Viola-Jones (missing all the non-frontal faces), then
has humans manually remove false positives, then
passes the remaining images to the commercial sys-
tem used to create LFW-a, and finally, then runs the
best performing system on LFW-a. 5% of this algo-
rithm’s error rate would be attributed to the last step.
2. Within the DAR framework, a more fair natural
image recognition test along the lines of LFW would,
at least, have to include the kinds of images obtained
by the errors of the previous stages. At least, these
images should be included if the results are to be un-
derstood as measuring progress on unconstrained face
recognition. Even if one expects to have relatively
strong detection and alignment in the pipeline, it is
still desirable for the last step to tolerate transforma-
tions. This allows the recognition system to “rescue”
some alignment errors. It introduces redundancy into
the system and prevents alignment from being a sin-
gle point of failure.
3. It is interesting to consider to what extent, if
any, the DAR framework is applicable to the brain’s
method of recognizing faces. Eye movements serve
to approximately align images across time. How-
ever, numerous studies have shown that the brain’s
visual system is surprisingly tolerant of transforma-
tions, even when the images are flashed more quickly
than the eyes can move (Hung et al., 2005). One in-
terpretation is that the brain’s visual system has two
operating modes. One mode is faster and more auto-
matic; it does not involve eye movements. The other
mode operates more slowly, engages specific task-
related information, and employs eye movements for
alignment.
4 CONCLUSIONS
It has long been appreciated that the development of
appropriate recognition tests to isolate subproblems
is essential to advancing computer vision. Notable
SubtasksofUnconstrainedFaceRecognition
119

datasets in this tradition include the Face Recognition
Grand Challenge (FRGC) (Phillips et al., 2005) and
Multi-PIE (Gross et al., 2010) datasets. Approaches
based on synthetic data have fallen out of favor in re-
cent years. While synthetic tests clearly have limi-
tations: the variability within the class of synthetic
faces does not approach that of natural faces. Tests
with synthetic data also have numerous advantages.
In particular, appearance transformations can be spec-
ified with a level of detail that could neverbe obtained
in a dataset of natural photographs. Very large syn-
thetic datasets can be created with no extra cost, in the
case of the SUFR challenge, it was simple to include
tests that address interaction effects between transfor-
mations. This could not have been done in a set of
natural photographs without a costly investment.
We advocate an approach that combines tests on
unconstrained natural image datasets like Labeled
Faces in the Wild with detailed testing of particular
subtasks. However, the results presented here, and
(much more so) the work of Chen et al. (2013)—the
creators of the current (95%) state-of-the-art system
for LFW—argue that LFW may simply be too easy of
a dataset to guide future progress. We suggested that
the next generation of datasets ought to focus more on
the problem of transformations. To that end, we are
making the new SUFR-W dataset, as well as the com-
plete set of synthetic datasets, available to interested
researchers.
ACKNOWLEDGEMENTS
This material is based upon work supported by the
Center for Brains, Minds, and Machines (CBMM),
funded by NSF STC award CCF-1231216.
REFERENCES
Blender.org (2013). Blender 2.6.
Braje, W., Kersten, D., Tarr, M., and Troje, N. (1998). Illu-
mination effects in face recognition. Psychobiology,
26(4):371–380.
Chan, C., Tahir, M., Kittler, J., and Pietikainen, M.
(2013). Multiscale local phase quantization for robust
component-based face recognition using kernel fusion
of multiple descriptors. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 35(5):1164–1177.
Chen, D., Cao, X., Wen, F., and Sun, J. (2013). Blessing of
Dimensionality: High-dimensional Feature and Its Ef-
ficient Compression for Face Verification. In IEEE In-
ternational Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
DiCarlo, J., Zoccolan, D., and Rust, N. (2012). How does
the brain solve visual object recognition? Neuron,
73(3):415–434.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrim-
inatively trained part-based models. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(9):1627–1645.
Gross, R., Matthews, I., Cohn, J., Kanade, T., and Baker,
S. (2010). Multi-pie. Image and Vision Computing,
28(5):807–813.
Grother, P., Quinn, G., and Phillips, P. (2010). Report on
the evaluation of 2d still-image face recognition algo-
rithms. NIST Interagency Report, 7709.
Guillaumin, M., Verbeek, J., and Chmid, C. (2009). Is that
you? Metric learning approaches for face identifica-
tion. In IEEE International Conference on Computer
Vision, pages 498–505, Kyoto, Japan.
Huang, G. B., Mattar, M., Berg, T., and Learned-Miller,
E. (2008). Labeled faces in the wild: A database
for studying face recognition in unconstrained envi-
ronments. In Workshop on faces in real-life images:
Detection, alignment and recognition (ECCV), Mar-
seille, Fr.
Hung, C. P., Kreiman, G., Poggio, T., and DiCarlo, J. J.
(2005). Fast Readout of Object Identity from Macaque
Inferior Temporal Cortex. Science, 310(5749):863–
866.
Hussain, S., Napol´eon, T., and Jurie, F. (2012). Face recog-
nition using local quantized patterns. In Proc. British
Machine Vision Conference (BMCV), volume 1, pages
52–61, Guildford, UK.
Leibo, J. Z., Mutch, J., Rosasco, L., Ullman, S., and Pog-
gio, T. (2010). Learning Generic Invariances in Object
Recognition: Translation and Scale. MIT-CSAIL-TR-
2010-061, CBCL-294.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer vision, 1999. The pro-
ceedings of the seventh IEEE international conference
on, volume 2, pages 1150–1157. Ieee.
Mutch, J., Knoblich, U., and Poggio, T. (2010). CNS:
a GPU-based framework for simulating cortically-
organized networks. MIT-CSAIL-TR, 2010-013(286).
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
24(7):971–987.
Ojansivu, V. and Heikkil¨a, J. (2008). Blur insensitive
texture classification using local phase quantization.
In Image and Signal Processing, pages 236–243.
Springer.
Phillips, P. J., Flynn, P. J., Scruggs, T., Bowyer, K. W.,
Chang, J., Hoffman, K., Marques, J., Min, J., and
Worek, W. (2005). Overview of the face recogni-
tion grand challenge. In Computer vision and pattern
recognition, 2005. CVPR 2005. IEEE computer soci-
ety conference on, volume 1, pages 947–954. IEEE.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
120

Pinto, N., Barhomi, Y., Cox, D., and DiCarlo, J. J. (2011).
Comparing state-of-the-art visual features on invariant
object recognition tasks. In Applications of Computer
Vision (WACV), 2011 IEEE Workshop on, pages 463–
470. IEEE.
Pinto, N., Cox, D., and DiCarlo, J. J. (2008a). Why is real-
world visual object recognition hard? PLoS computa-
tional biology, 4(1):e27.
Pinto, N., DiCarlo, J. J., and Cox, D. (2009). How far can
you get with a modern face recognition test set using
only simple features? In Computer Vision and Pattern
Recognition, 2009. CVPR 2009. IEEE Conference on,
pages 2591–2598. IEEE.
Pinto, N., DiCarlo, J. J., Cox, D. D., et al. (2008b). Estab-
lishing good benchmarks and baselines for face recog-
nition. In Workshop on Faces in’Real-Life’Images:
Detection, Alignment, and Recognition.
Poggio, T., Mutch, J., Anselmi, F., Leibo, J. Z., Rosasco, L.,
and Tacchetti, A. (2012). The computational magic of
the ventral stream: sketch of a theory (and why some
deep architectures work). MIT-CSAIL-TR-2012-035.
Riesenhuber, M. and Poggio, T. (1999). Hierarchical mod-
els of object recognition in cortex. Nature Neuro-
science, 2(11):1019–1025.
Serre, T., Oliva, A., and Poggio, T. (2007). A feedforward
architecture accounts for rapid categorization. Pro-
ceedings of the National Academy of Sciences of the
United States of America, 104(15):6424–6429.
Singular
Inversions (2003). FaceGen Modeller 3.
Troje, N. and B¨ulthoff, H. (1996). Face recognition under
varying poses: The role of texture and shape. Vision
Research, 36(12):1761–1771.
van de Sande, K. E. A., Gevers, T., and Snoek, C. G. M.
(2011). Empowering visual categorization with the
gpu. IEEE Transactions on Multimedia, 13(1):60–70.
Vedaldi, A. and Fulkerson, B. (2008). VLFeat: An open
and portable library of computer vision algorithms.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57(2):137–154.
Wolf, L., Hassner, T., and Taigman, Y. (2011). Effective
unconstrained face recognition by combining multiple
descriptors and learned background statistics. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 33(10):1978–1990.
Zhu, X. and Ramanan, D. (2012). Face detection, pose es-
timation, and landmark localization in the wild. In
IEEE International Conference on Computer Vision
and Pattern Recognition (CVPR), pages 2879–2886,
Providence, RI.
SubtasksofUnconstrainedFaceRecognition
121
