
Coupling Camera-tracked Humans with a Simulated Virtual Crowd
Jorge Ivan Rivalcoba Rivas
1
, Oriam De Gyves
1
, Isaac Rudom
´
ın
2
and Nuria Pelechano
3
1
Department of Computer Science, Tecnol
´
ogico de Monterrey, M
´
exico, M
´
exico
2
Computer Sciences, Barcelona Supercomputing Center, Barcelona, Spain
3
Llenguatges i Sistemes Inform
`
atics, Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
Keywords:
Crowd simulation, Computer vision, Semantic Local Binary Patterns (S-LBP), Computer graphics, Motion
control.
Abstract:
Our objective with this paper is to show how we can couple a group of real people and a simulated crowd
of virtual humans. We attach group behaviors to the simulated humans to get a plausible reaction to real
people. We use a two stage system: in the first stage, a group of people are segmented from a live video,
then a human detector algorithm extracts the positions of the people in the video, which are finally used
to feed the second stage, the simulation system. The positions obtained by this process allow the second
module to render the real humans as avatars in the scene, while the behavior of additional virtual humans
is determined by using a simulation based on a social forces model. Developing the method required three
specific contributions: a GPU implementation of the codebook algorithm that includes an auxiliary codebook
to improve the background subtraction against illumination changes; the use of semantic local binary patterns
as a human descriptor; the parallelization of a social forces model, in which we solve a case of agents merging
with each other. The experimental results show how a large virtual crowd reacts to over a dozen humans in a
real environment.
1 INTRODUCTION
Real-time crowd simulation is a research area that is
growing rapidly and has become one of the main re-
search directions in computer games, movies and vir-
tual reality (Wang et al., 2012). Applications include
urban planning, security and entertainment, among
others (De Gyves et al., 2013). It has been studied
extensively but only in a few cases the computer gen-
erated crowds react to real humans. Most research is
focused on the behavior of virtual humans, that may
be data driven, rule based or socially inspired. The
end result is almost every time a crowd interacting
only with its virtual environment. In the human com-
puter interaction literature there is some research on
the interaction between virtual humans and a specific
kind of real humans: end-users, but most are limited
to one or two users and a small number of virtual hu-
mans.
A simulation system which includes some real hu-
mans (pedestrians, for example) in crowds of agents,
that react to the real humans would have several po-
tential applications in special-effects for films and
video games. One goal of this research is to visual-
ize an authoring tool that would use a camera look-
ing down on a group of actors to reduce the time of
animation production in the context of crowd gener-
ation. One could also conceive games where several
real players lead teams of virtual team-mates. Other
applications would allow researchers to evaluate their
behavior algorithms by directly comparing them with
real human behaviors.
The aim of the present work is to perform the cou-
pling between a group of real people and a simulated
crowd of virtual humans. To achieve this, we pro-
pose a two-stage interactive system. In the first stage,
named the vision system, pedestrians are segmented
and tracked from a live video. The positions of the
captured pedestrians are used in the second module,
the simulation system. The simulation system is then
responsible for the reaction of the virtual crowd to the
tracked real humans.
2 RELATED WORK
A crucial part of making the system presented in this
article suitable for interaction is the time consumed
312
Rivalcoba Rivas J., De Gyves O., Rudomín I. and Pelechano N..
Coupling Camera-tracked Humans with a Simulated Virtual Crowd.
DOI: 10.5220/0004694403120321
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 312-321
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

by the recognition, simulation and rendering tasks. To
get a deeper understanding of the system, this section
describes the challenges and the state of the art related
to computer vision and crowd simulation.
2.1 Human Detection
As mentioned above, human detection is the first step
of the system. This is a challenging problem due to
several factors, which are listed below:
• Illumination variance.
• Non uniform colors.
• Different scales of object of interest.
• Cluttered backgrounds.
• Noise due to the small movements in the video
sequence.
There has been a large amount of research using
vision for human detection. Viola et al. described
a machine learning approach for visual object recog-
nition and also introduced the “integral images”, a
popular technique to accelerate the calculus of many
descriptors (Viola and Jones, 2001), this algorithm
was used to detect faces in static images by combin-
ing complex classifiers in a cascade, which allowed
background regions of the image to be quickly dis-
carded while spending more computational time on
regions with a high probability of being the interest
objects. The same authors adapted the technique to
detect pedestrians in a video sequence by taking ad-
vantage of the motion appearance of a walking person
and using AdaBoost for the training process and con-
structing of the classifier (Viola et al., 2003). Dalal
et al. performed a complete study of Histogram of
Oriented Gradients (HOG) applied to the representa-
tion of humans (Dalal and Triggs, 2005), this method
offers good results for pedestrian detection by evalu-
ating local histograms of image gradient orientations
over a dense normalized overlapping grid, avoiding
the common problem of illumination variance. Tuzel
et al. detected pedestrians by representing an image
region as covariance matrices of spatial locations, in-
tensities and derivatives, to name a few (Tuzel et al.,
2007). This work follows the trend of using logic
boost classifiers: the authors reported that their results
were better than the work by Dalal when using the IN-
RIA database.
In most cases the detection systems include a pre-
processing phase, which consists of the background
removal of the scene. This is the case of the work pre-
sented by Banerjee et al., which combined an adaptive
background modeling with HOG features (Banerjee
and Sengupta, 2008). They proposed adapts itself to
long lasting changes in the background over time by
learning only the stationary parts of the scene and ig-
noring the moving foreground. The moving regions
are then considered as a Region of Interest (ROI) and
the HOG is applied to classify whether such region is
a human or not. Another approach was presented by
Bhuvaneswari et al. called edgelet features, which are
short segments belonging to a line or a curve (Bhu-
vaneswari and Rauf, 2009). The detection was per-
formed with a module that was composed of several
classifiers arranged in cascade; the authors reported a
detection rate up to 70%. The aforementioned works
dealt with side perspective scenes, which is desirable
for surveillance applications, however they are not
recommended when dealing with crowd analysis, due
to the occlusion presented when the crowd size in-
creases, causing the accuracy of the recognition sys-
tems to decrease.
Lengvenis et al. presented the passenger counter
system created and installed in the Kaunas public city
transport (Lengvenis et al., 2013); unlike other work
based on edge features, this paper uses the vertical and
horizontal projection of the scene using a top-view
perspective, also known as bird’s eye view. The re-
sults reported an accuracy of 86% for a single passen-
ger getting on or off the bus, however it could not de-
tect people passing each other or getting on a bus to-
gether and presented problems with lighting changes.
Ozturk et al. proposed a system to determine the head
and body orientation of humans in top-view scenes
(Ozturk et al., 2009), but it has the same problems that
the work by Lengvenis. Their system used a shape
context based approach to detect basic body orienta-
tion and proposed an optical flow based on Scaled In-
variant Feature Transform (SIFT) features, however
the occlusions were left for future work, making this
algorithm unsuitable for crowded scenes.
We decided to use a bird’s eye perspective in or-
der to minimize the occlusion presented in crowded
scenes. Another important issue to deal with is hav-
ing a good background segmentation process to focus
the computational effort in the classification tasks, as
well as to determine a good representation model to
recognize humans from aerial footage, taking into ac-
count the deformation present when a human moves
away from the camera.
2.2 Simulation
There is extensive research that focuses on model-
ing accurate behaviors for virtual agents. Researchers
have studied crowd simulations in both microscopic
and macroscopic levels; macroscopic simulations are
concerned about the realistic movement of the crowd
CouplingCamera-trackedHumanswithaSimulatedVirtualCrowd
313

as a mass while microscopic simulations focus on
the realistic movement of the individuals. One of
the first research works focused on autonomous vir-
tual agents and their behaviors are the steering behav-
iors by (Reynolds, 1987). According to Reynolds’ re-
search, a bird is aware of three aspects during flock-
ing, itself, two or three nearest neighbors, and the rest
of the flock.
Helbing et al. presented the social forces model,
where each agent tries to move at a desired velocity
while applying friction and repulsion forces against
obstacles and other agents (Helbing and Moln
´
ar,
1995). According to the authors, social forces are
well suited for pedestrians in normal, or known, sit-
uations. Helbing extended his research and studied
the behavior of pedestrians in normal and evacuation
situations (Helbing et al., 2002). A nervousness pa-
rameter causes pedestrians to move faster, while push-
ing other individuals, and exhibit a herding behav-
ior during evacuations. The social forces model has
been extended to support groups of related pedestri-
ans (Moussa
¨
ıd et al., 2010).
Treuille et al. presented the Continuum Crowds
model, which unifies the path planning and colli-
sion evasion stages by using velocity and potential
fields (Treuille et al., 2006). This model can simu-
late thousands of virtual agents in interactive appli-
cations, however, pedestrians do not have individual
goals. Millan et al. used attraction and repulsion
forces codified in textures to steer the agents through
the environment (Millan et al., 2006). In this approach
every individual agent has its own set of goals depend-
ing on which agents were nearby, but in some cases
the forces may cancel each other, leaving the agents
stuck in the environment.
Fiorini and Shiller introduced the term Velocity
Obstacles (VO), a set of velocities that will lead into
collision between agents (Fiorini and Shiller, 1998).
Agents must choose velocities that are not elements
of the VO set to move in collision-free routes. The
GAMMA group extended this idea into the Recip-
rocal Velocity Obstacles (RVO) (Van den Berg and
Manocha, 2008). The RVO assumes that every agent
in the simulation is steered using the same rules,
which eliminates the oscillations in the paths of the
VOs. Bleiweiss parallelized the RVO algorithm and
implemented it on CUDA, obtaining a 4.8x speedup
over the original implementation (Bleiweiss, 2009).
Van den Berg et al. further extended RVO into Re-
ciprocal n-body Collision Avoidance (Van den Berg
et al., 2011). The algorithm reduced the problem to
solving a low-dimensional linear program. By using
this algorithm, the authors were able to simulate thou-
sands of pedestrians in real-time.
A vision-based collision avoidance approach was
presented by Ond˘rej et al. (Ond
ˇ
rej et al., 2010). The
authors use a synthetic vision approach to detect ob-
stacles in the field of view of every agent and time-to-
interaction values to steer the agents.
In our work we have modeled the behavior of
virtual pedestrians using the algorithm presented by
(Moussa
¨
ıd et al., 2010); this model incorporates a
group force that makes it possible to simulate group
formation. In his paper the size of the groups is de-
termined statistically according to observations from
video sequences.
2.3 Virtual Environments and
Interaction
Tsai-Yen et al. presented a computer simulation
crowded by virtual users and virtual humans (Li et al.,
2002). Each group of virtual humans is led by an in-
telligent group leader and a world manager can inter-
actively assign a goal configuration to a group leader
through a graphical user interface at the virtual envi-
ronment server. Thalmann et al. presented an interac-
tive navigation system in which a user is able to con-
trol an avatar in the crowd through a natural interface,
but the interaction remains between a single user and
the virtual characters (Wang et al., 2012). Pelechano
proposed an experiment to closely study the behavior
of people interacting with a virtual crowd (Pelechano
and Stocker, 2008). A virtual scenario is created to
simulate a cocktail party. The main goal of the exper-
iment was to examine whether participants interacting
with a virtual crowd would react to the virtual crowd
as they would do in a similar real situation.
2.4 Computer Vision and Graphics for
Crowd Simulation
There is some research that has merged computer vi-
sion with computer graphics in the context of crowd
simulation is data driven models. In this case the mo-
tion of real people is used to model virtual crowds,
for example Musse (Musse et al., 2007) simulated
the movement of virtual humans based on trajectories
captured from filmed video sequences, these trajecto-
ries are grouped into similar classes using an unsu-
pervised clustering algorithm, Lee (Lee et al., 2007)
used aerial footage in closed environments for a simi-
lar purpose. Lerner (Lerner, 2007) created a model for
collision avoidance by learning from real-world ex-
amples generated from tracked video segments of real
pedestrian crowds. Sun and Qin (Sun and Qin, 2011)
presented a model for solving collisions between hu-
mans, making use of motion capture data that allow a
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
314

Figure 1: System overview. The human’s data captured
by the detection phase is used in the simulation phase. The
simulated crowd is able to react to the real humans.
more natural and realistic motion of pedestrians com-
pared with RVO model. Recently Ren (Ren et al.,
2013) performed an integration of virtual pedestrians
into a video of a scene consisting of real pedestrians.
In that paper, to avoid segmentation issues due to oc-
clusion, groups of pedestrians are taken as a unit in-
stead of segmenting individuals.
3 SYSTEM ARCHITECTURE
The system we describe in this article is designed to
be interactive even when using consumer grade hard-
ware, while also being capable of capturing humans
from video footage and simulating thousands of vir-
tual agents. A diagram showing the application flow
can be seen in Figure 1.
3.1 Vision System
The use of markers to analyze a crowd has been used
successfully by (Wang and Sun, 2008): he employs
colored hats to aid the detection system to extract in-
formation regarding to pedestrian dynamics. The sys-
tem proposed in the present paper aims to perform a
reliable non intrusive detection and tracking, thus the
use of markers is not an option. In the same way, the
computer vision algorithms must process the image
in real time to be able to provide the positions of real
pedestrians as an input to the simulation stage.
The system that performs the human detection
consists of 5 stages (Figure 2). The first stage is the
background subtraction which is responsible splitting
the scene into background and foreground regions.
Foreground regions are labeled as Regions of interest
(ROI), and this labeling allows the system to concen-
Figure 2: The vision stages that produce the set of positions
that will be sent to the simulation system.
Figure 3: Head-shoulder part of a human that exhibits their
omega-like shape.
trate the computational efforts in the human detection
tasks. Once the set of ROI have been obtained, in
the second stage ROIs are passed one by one to the
feature extraction module which generates a vector of
features that models the object detected. Each one
of these vectors is then sent to a support vector ma-
chine (SVM) that performs the classification into hu-
man or not human. We decided to detect the head
and shoulders section of the body due to the fact that
the human head remains constant over all the scene
(Mukherjee and Das, 2013), unlike other parts of the
body. The head and shoulders section exhibit an Ω
like shape (see Figure 3). This property makes the
head and shoulders the most stable parts of the body
to be detected and tracked.
In the rest of this section we explain each stage in
more detail .
3.1.1 Stage 1: Background Subtraction
To perform background subtraction we propose a
modified version of the codebook algorithm presented
by (Kim et al., 2005). The codebook algorithm adopts
a clustering and quantization technique to construct
a background model from a long observation of se-
quences of pixel intensities. Each pixel owns its code-
book, that is made of codewords produced on the
training stage; these codewords are constructed based
CouplingCamera-trackedHumanswithaSimulatedVirtualCrowd
315

Figure 4: This figure shows the model used to calculate the
color distortion ∆ between two pixels x
t
and v
i
.
on two parameters:
• Brightness
• Color distortion
The brightness of a given pixel x at a certain time t,
expressed as~x
t
could be defined for this purpose as the
norm of the vector in the RGB color space described
by (1).
k
~x
t
k
2
= R
2
+ G
2
+ B
2
(1)
The color distortion between two pixels,~x
t
and~v
i
,
is the measure of the opposite side of the angle formed
by the two color vectors, as seen in Figure 4. This
property is described by the equation (2) and (3):
colordist(~x
t
,~v
i
) = ∆ =
k
~x
t
k
2
−
k
~x
t
k
2
cos
2
α (2)
k
~x
t
k
2
cos
2
α =
h
~x
t
,~v
i
i
2
k
~v
i
k
2
(3)
Each pixel owns its codebook, and each codebook
is made of codewords. A codeword could be seen as a
box that stores information about the pixel intensities;
every codeword is generated through the observation
of each pixel during a period of time, called training
stage. The training may take one or two minutes, dur-
ing which a new codeword is collected. If there is
no codeword, already in the codebook, that meets the
similarity measures described above, the codeword is
stored in the codebook. Otherwise, the training algo-
rithm counts every codeword match. At the end of the
training process, codewords with few occurrences are
discarded from the codebook.
To make the algorithm more robust against illumi-
nation changes, the modification we propose consists
Figure 5: To maintain the background model and make it ro-
bust against intensity changes, a second code book is used
and maintained by those regions with no movement. This
image shows, in orange, all the regions that feed the auxil-
iary codebook, represented by the icon below the images.
Figure 6: Once the image is captured, it is sent to the GPU
to be processed and then returned to the CPU.
of maintaining an auxiliary codebook that generates
codewords only for regions with no movement. Once
a certain time has elapsed, this codebook is cleaned
of spurious data, and then is added to the main code-
book. This allows the background model to be up-
dated regularly, see Figure 5.
To perform this task within an acceptable frame
rate, we implemented a parallel version of the code-
book algorithm, using the graphics hardware. Each
thread works over one pixel, as seen in Figure 6. Once
a frame is captured, the image is processed on the
GPU using the previous description.
3.1.2 Stage 2 & 3: ROI Detection and Feature
Extraction
Once the background has been removed, the next step
is to extract the blobs from the foreground regions.
These blobs are rectangular regions that contain the
humans, and are converted from RGB color space to
gray scale.
To model a human we use a variant of local binary
patterns (LBP) presented by (Ojala, 2002). The LBP
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
316
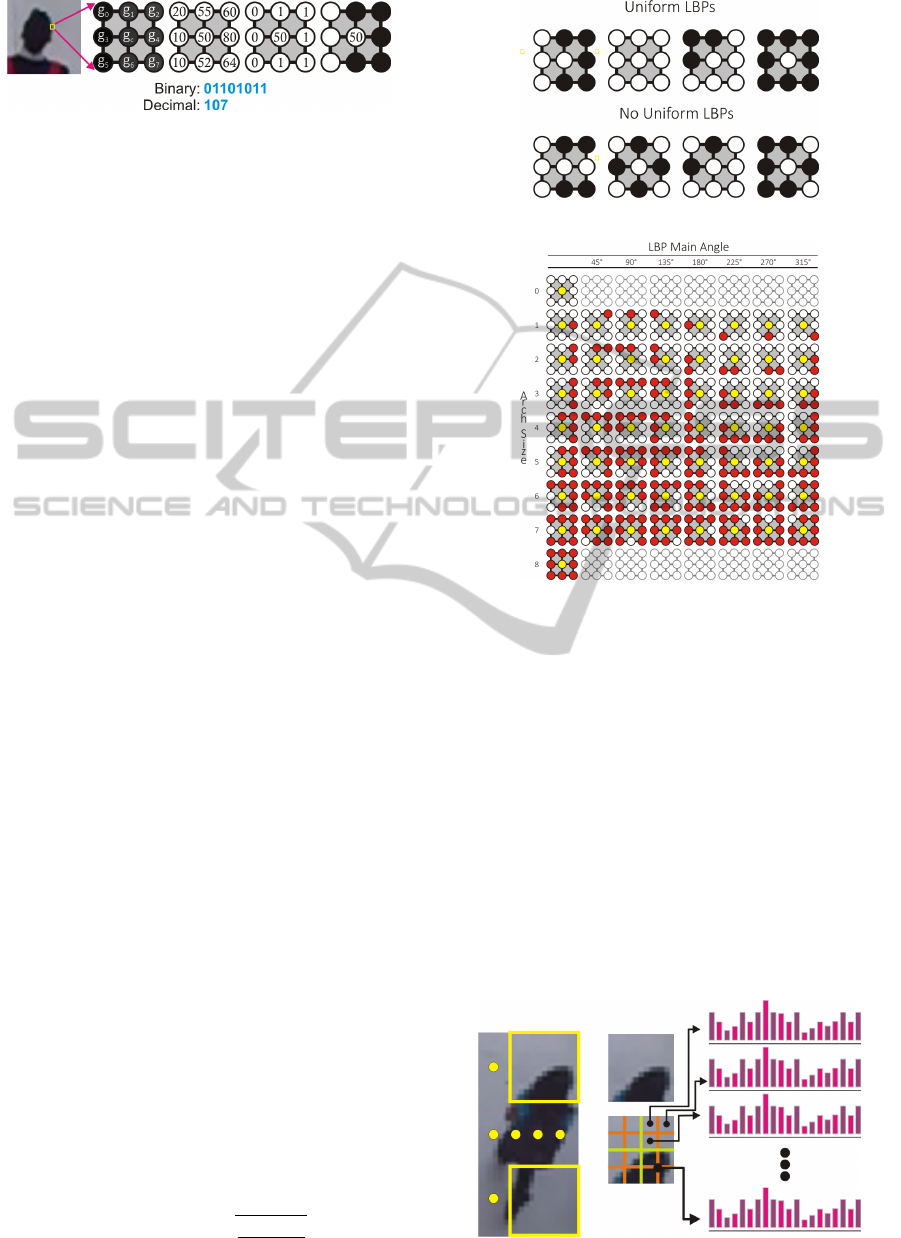
Figure 7: An illustration of the basic LBP operator.
operator assigns a label to every pixel of an image
by thresholding the 3x3 neighborhood of each pixel
with its own value and considering the result as a bi-
nary number. E.g., given a pixel (x
c
,y
c
), the LBP of
that pixel is calculated using equation 4, where P cor-
responds to the number of sampling points, R is the
radius of the neighborhood to be sampled, g
p
repre-
sents each sampling point and g
c
represents the pixel
(x
c
,y
c
); the histogram of the numbers obtained along
all the image is used as the descriptor. Figure 7 shows
an illustration of the basic LBP.
LBP
P,R
(x
c
,y
c
) =
P−1
∑
p=0
s(g
p
− g
c
)2
p
(4)
s(x) =
(
1, x ≥ 0
0, otherwise
(5)
Although LBPs have many advantages over other
gradient-based features, the basic LBP is not robust
enough to be used as human descriptor: however its
strengths can be exploited using a variant called se-
mantic LBP (S-LBP) proposed by (Huang, 2008). S-
LBPs are made of uniform LBPs. An LBP is called
uniform if only at most two bitwise transitions be-
tween 0 and 1 are presented, in other words several
continuous “1” bits form an arc on the sampling cir-
cle; these arcs can be represented with its principle
direction and arc length (see Figure 9); by using this
strategy, the dimension of the feature vector is re-
duced. In our work we use a detection kernel of 32x32
pixels size which produces a 1160D vector; all the
S-LBPs are used to compute an histogram, each his-
togram represents the feature vector of each region.
To speed up the computation of S-LBPs, we propose
the use of a look up table to classify the type of S-LBP.
As it has been demonstrated by (Tuzel et al.,
2007) the ensemble of variable-size sub-windows can
greatly promote detection efficiency. For this rea-
son, we adopted a multi resolution approach similar
to (Ahonen, 2006). We divided each detection kernel
into local regions, then the S-LBPs descriptors are ex-
tracted for each region independently. The vector “v”
obtained for each sub-window is normalized using the
following equation:
L1 − sqrt : f =
r
v
k
v
k
1
+ e
(6)
Figure 8: Uniform and non uniform LBPs.
Figure 9: This figure shows the only 58 possible S-LBPs of
a pixel.
The descriptors are then concatenated to form a
global descriptor vector, see Figure 10. As previously
mentioned, a 1160D vector is generated using a de-
tection kernel of 32x32 pixels, these vectors feed an
SVM classifier that decide if the image of the kernel
belongs to a person or not.
3.1.3 Stage 4: SVM Classification
We use the OpenCV SVM library to train and clas-
sify the head and shoulders part of the human body,
using the same dataset employed by (Li et al., 2009).
This dataset uses top view shots of humans’ heads and
Figure 10: This figure shows the subdivision made to the
detection kernel to compute the histogram.
CouplingCamera-trackedHumanswithaSimulatedVirtualCrowd
317

Figure 11: These are the type of images used to train the
head and shoulder detector.
Figure 12: Segmentation of the scene in function of the dis-
tance between the camera and the human.
shoulders, as seen in Figure 11.
One important observation is that the pedestrians
exhibit a deformation due to the camera perspective,
making difficult to tune up the classifier (Rivalcoba
and Rudomin, 2013). To overcome this issue, and im-
prove the detection results, we divide the camera view
on different segments in function by the distance be-
tween the camera and the human. Figure 12 shows the
depth map and the deformation suffered by a group of
humans as they move along the scene.
3.1.4 Stage 5: Lucas Kanade Tracker
Once a human head is detected, a point is associ-
ated with it. Each detected point is tracked over ev-
ery frame using the pyramidal version of the Lucas
Kanade tracker implemented on the OpenCV library.
All the points detected are then stored into a texture
to be used in the simulation stage; this step is detailed
in the next section.
3.2 Simulation System
OpenGL 4.3 introduced Compute Shaders to its API,
which enable its shading language to perform gen-
eral computing in the graphics hardware. Compute
Shaders provide an alternative approach to CUDA
from Nvidia and OpenCL from the Khronos Group
for General-Purpose Computing on Graphics Process-
ing Units (GPGPU). Unlike CUDA and OpenCL,
Compute Shaders are similar to other shader stages
in the graphics pipeline and are able to read from
textures, images and buffers and write to images
and buffers without mapping to other data structures
or switching between graphics and compute con-
texts. We have implemented several applications with
graphics interoperability, including the technique pre-
sented in this Section, in both CUDA and Compute
Shaders and the features of the latter allowed signifi-
cantly faster development while maintaining a similar
performance.
For our simulation system, we use Compute
Shaders in order to simulate the agents and use a
method based on social forces to steer the agents
around the environment. All the logic related to agent
control is performed in the graphics hardware, which
allows us to perform large scale simulations with
thousands of agents in real-time.
For the interoperability between rendering and
simulation, we store all the data required for the simu-
lation in texture memory. Data captured by the vision
system (Section 3.1) is stored in the same textures that
the simulated agents use.
To steer the simulated agents we developed a par-
allel implementation of the work by Moussaid et al.
(Moussa
¨
ıd et al., 2010). Three data textures are re-
quired for the simulation: position, velocity and target
textures. Each texture element (texel) i holds the data
of the agent or pedestrian i. To update the positions
of the simulated agents, we use equations (7), (8) and
(9).
~
f
i
=
~
f
d
i
+
~
f
n
i
+
~
f
o
i
+
~
f
g
i
(7)
~v
inew
=~v
i
+
~
f
i
· ∆t (8)
~p
inew
= ~p
i
+~v
inew
· ∆t +
~
f
i
· ∆t
2
2
(9)
Where
~
f
i
represents the acceleration of the agent i
in the current frame, and it is affected by its internal
motivations
~
f
d
i
, its neighbors
~
f
n
i
, the nearest obstacles
~
f
i
o
and its group dynamic
~
f
g
i
. The new velocity ~v
inew
is obtained by adding the acceleration to the previous
velocity ~v
i
of the agent. Finally, the position of the
agent is updated with both its acceleration and its ve-
locity. In equations 8 and 9, ∆t represents the time
between two consecutive frames.
In his original research, Helbing describes a body
force and a sliding force between agents for counter-
acting body compression and impeding relative tan-
gential motion, respectively (Helbing et al., 2000).
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
318

These forces are part of the force between agents,
~
f
n
i
.
Through experimentation, we found that the tangen-
tial velocity difference, ∆~v
t
ji
= (~v
j
−~v
i
) · t
i j
, used in
the sliding force is ∆~v
t
ji
= 0 if the agents are facing
each other in opposite directions with the same veloc-
ity. This leads to the agents getting stuck in tests like
the bidirectional movement, as can be seen in Figure
13.
Figure 13: The original tangential velocity difference may
be zero when agents face each other with the same velocity,
leaving the agents stuck in a line.
Figure 14: Bidirectional test performed with the modified
tangential velocity difference.
In case ∆~v
ji
=~v
j
−~v
i
≤ ε then we assign ∆~v
ji
= υ,
where υ represents a vector constant that satisfies
kυk 6= 0. The magnitude of υ is proportional to the
sliding force, and a greater sliding force makes the
agents evade each other faster. A bidirectional test
performed using this modification to the tangential
velocity difference can be seen in Figure 14.
We detect neighbors based on their positions using
a spatial hash-like algorithm. This is an image based
technique that samples an area in an environment tex-
ture where each agent marks its position. The algo-
rithm searches for the nearest neighbors using this
environment texture; since both the simulated agents
and the tracked humans store their positions in this
texture, the simulated agents are aware of the tracked
humans, just as if they were other agents. By being
aware of the position of the real humans, the agents
are able to evade them.
4 RESULTS
We have implemented the techniques previously de-
scribed using C++ for the CPU code, and OpenGL
for the simulation and visualization, on a Windows 7
x64 operating system with an Intel i7-2630QM quad
core processor at 2.00 GHz, 8GB of memory and an
NVIDIA GT 540M graphics card. The GT 540M is a
Fermi-family graphics card and is OpenGL 4.3 capa-
ble; it is considered a low to mid-range GPU. For the
rendering and simulation systems we have only used
OpenGL, specifically a 4.3 core profile context.
Results show that this system can perform a real-
time coupling between a group of tracked humans
and a computer simulated group of virtual charac-
ters; real pedestrians are rendered as red avatars while
simulated pedestrian are rendered in gray color (Fig-
ure 15), in this case, we have tuned the group social
forces to produce formations of up to 3 people, see
Figure 16. The use of an auxiliary codebook for back-
ground modeling made the system capable to cor-
rectly segment the scene in the presence of illumina-
tion changes. The combination of semantic LBPs and
the subdivision of the scene into segments allow han-
dling the deformations suffered by the humans as they
move away from the camera.
The usage of special cameras was not necessary,
any standard web camera fully meets the minimum
technical specifications to make the system reliable.
The dimension of the processed images were 640 by
480 pixels. The top view perspective -also called
bird’s eye view- was used to capture as many pedes-
trians as possible, minimizing the probability of oc-
currence of occlusions. In our experiments, we were
able to capture over a dozen pedestrians while keep-
ing interactive frame rates.
We achieved a frame rate above 60 frames per sec-
ond, enough to be considered a real-time system. Us-
ing the system, we were able to simulate thousands
of autonomous agents. The use of the social forces
model on the simulation side, produces a plausible ef-
fect of integration between the two worlds.
5 CONCLUSIONS AND FUTURE
WORK
The computer interaction powered by camera tech-
nology is becoming more popular over the years.
In our case, there are several challenges to over-
come, such as background subtraction against illumi-
nation changes, human detection, tracking groups in
crowded scenes, and fitting behaviors on virtual char-
acters, to name a few.
CouplingCamera-trackedHumanswithaSimulatedVirtualCrowd
319

Figure 15: Left: Several tracked real humans (red) are coupled with a large virtual crowd (gray). Right: The captured image.
Figure 16: This image shows the formations produced us-
ing group social forces, the group formations are up to 3
people.
Taking into account the above, we have presented
a system that allows a large virtual crowd to react to
rea l humans by tracking them on video using only
consumer grade hardware. This system is capable
of detecting and tracking over a dozen humans in a
scene, and simulating thousands of virtual agents. It
allows coupling between the tracked humans and the
simulated agents while maintaining real-time frame
rates.
The system presented in this paper could lead to
a system that could test new behavior algorithms for
virtual agents, whether they are data driven or rule
based, because it allows a direct visual comparison
with real humans. It may also allow more accurate
urban planning and security simulations since some
part of the population in the crowd is constituted of
real people. In the entertainment industry, this system
provides a contribution to the workspace of applica-
tions that seek the coupling of the real world and a
virtual world.
We are working in making both systems, vision
and simulation, totally asynchronous from each other.
When the vision data is not ready to be processed by
the simulation system, the captured pedestrians can
be simulated using the same behaviors of the agents.
Allowing the systems to work independently has two
main advantages, the first one is that each system can
be executed in a different platform -this would allow
the vision system to be implemented in an embedded
device such as a security camera while the simulation
system is running in a remote computer. The second
advantage of this setup is the ability to detect errors
in the behaviors used in the simulation mode when
the vision system updates the data of the tracked hu-
mans. Having a direct visual feedback between errors
in simulated and real data means a better benchmark
for a new simulation behavior.
REFERENCES
Ahonen, T. (2006). Face description with local binary pat-
terns: Application to face recognition. Pattern Analy-
sis and Machine Intelligence, 28(12):2037–41.
Banerjee, P. and Sengupta, S. (2008). Human motion de-
tection and tracking for video surveillance. Proceed-
ings of the national Conference of tracking and video
surveillance activity analysis, pages 88–92.
Bhuvaneswari, K. and Rauf, H. A. (2009). Edgelet based
human detection and tracking by combined segmenta-
tion and soft decision. Control, Automation, Commu-
nication and Energy Conservation, (June):4–9.
Bleiweiss, A. (2009). Multi agent navigation on GPU.
White paper, GDC.
Dalal, N. and Triggs, B. (2005). Histograms of Oriented
Gradients for Human Detection. 2005 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR’05), 1:886–893.
De Gyves, O., Toledo, L., and Rudom
´
ın, I. (2013). Com-
portamientos en simulaci
´
on de multitudes : revisi
´
on
del estado del arte. Research in Computer Sci-
ence., 62(Special Issue: Avances en Inteligencia
Artificial.):319–334.
Fiorini, P. and Shiller, Z. (1998). Motion Planning
in Dynamic Environments Using Velocity Obsta-
cles. The International Journal of Robotics Research,
17(7):760–772.
Helbing, D., Farkas, I., and Vicsek, T. (2000). Simu-
lating dynamical features of escape panic. Nature,
407(6803):487–90.
Helbing, D., Farkas, I. J., Moln
´
ar, P., and Vicsek, T. (2002).
Simulation of Pedestrian Crowds in Normal and Evac-
uation Situations. Pedestrian and evacuation dynam-
ics, 21.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
320

Helbing, D. and Moln
´
ar, P. (1995). Social force model for
pedestrian dynamics. Physical Review E, 51(5):4282–
4286.
Huang, T. (2008). Discriminative local binary patterns for
human detection in personal album. In 2008 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8. IEEE.
Kim, K., Chalidabhongse, T. H., Harwood, D., and Davis,
L. (2005). Real-time foreground–background seg-
mentation using codebook model. Real-Time Imaging,
11(3):172–185.
Lee, K., Choi, M., Hong, Q., and Lee, J. (2007). Group be-
havior from video: a data-driven approach to crowd
simulation. In Proceedings of the 2007 ACM . . . ,
pages 109–118, San Diego, California.
Lengvenis, P., Simutis, R., Vaitkus, V., and Maskeliunas, R.
(2013). Application Of Computer Vision Systems For
Passenger Counting In Public Transport. Electronics
and Electrical Engineering, 19(3):69–72.
Lerner, A. (2007). Crowds by example. Computer Graphics
Forum, 26(3):655–664.
Li, M., Zhang, Z., Huang, K., and Tan, T. (2009). Rapid
and robust human detection and tracking based on
omega-shape features. In 2009 16th IEEE Interna-
tional Conference on Image Processing (ICIP), pages
2545–2548. IEEE.
Li, T.-Y., wen Lin, J., Liu, Y.-L., and ming Hsu, C. (2002).
Interactively Directing Virtual Crowds in a Virtual En-
vironment. Conf Artif Real Telexistence, 10.
Millan, E., Hernandez, B., and Rudomin, I. (2006). Large
Crowds of Autonomous Animated Characters Using
Fragment Shaders and Level of Detail. In Wolf-
gang Engel, editor, ShaderX5: Advanced Rendering
Techniques, chapter Beyond Pix, pages 501—-510.
Charles River Media.
Moussa
¨
ıd, M., Perozo, N., Garnier, S., Helbing, D., and
Theraulaz, G. (2010). The walking behaviour of
pedestrian social groups and its impact on crowd dy-
namics. PloS one, 5(4):e10047.
Mukherjee, S. and Das, K. (2013). Omega Model
for Human Detection and Counting for applica-
tion in Smart Surveillance System. arXiv preprint
arXiv:1303.0633, 4(2):167–172.
Musse, S. R., Jung, C. R., Jacques, J. C. S., and Braun, A.
(2007). Using computer vision to simulate the motion
of virtual agents. Computer Animation and Virtual
Worlds, 18(2):83–93.
Ojala, T. (2002). Multiresolution gray-scale and rotation
invariant texture classification with local binary pat-
terns. Pattern Analysis and Machine Intelligence,
24(7):971–987.
Ond
ˇ
rej, J., Pettr
´
e, J., Olivier, A.-H., and Donikian, S.
(2010). A synthetic-vision based steering approach
for crowd simulation. ACM Transactions on Graph-
ics, 29(4):1.
Ozturk, O., Yamasaki, T., and Aizawa, K. (2009). Track-
ing of humans and estimation of body/head orienta-
tion from top-view single camera for visual focus of
attention analysis. Computer Vision Workshops (ICCV
Workshops), pages 1020–1027.
Pelechano, N. and Stocker, C. (2008). Being a part of
the crowd: towards validating VR crowds using pres-
ence. Proceedings of the 7th international joint con-
ference on Autonomous agents and multiagent sys-
tems, (Aamas):12–16.
Ren, Z., Gai, W., Zhong, F., Pettr
´
e, J., and Peng, Q. (2013).
Inserting virtual pedestrians into pedestrian groups
video with behavior consistency. The Visual Com-
puter.
Reynolds, C. W. (1987). Flocks, herds and schools: A dis-
tributed behavioral model. ACM SIGGRAPH Com-
puter Graphics, 21(4):25–34.
Rivalcoba, I. J. and Rudomin, I. (2013). Segmentaci
´
on de
peatones a partir de vistas a
´
ereas. In Research in Com-
puting Science, volume 62, pages 129–230.
Sun, L. and Qin, W. (2011). A Data-Driven Approach for
Simulating Pedestrian Collision Avoidance in Cross-
roads. 2011 Workshop on Digital Media and Digital
Content Management, pages 83–85.
Treuille, A., Cooper, S., and Popovi
´
c, Z. (2006). Continuum
crowds. ACM Transactions on Graphics, 25(3):1160.
Tuzel, O., Porikli, F., and Meer, P. (2007). Human De-
tection via Classification on Riemannian Manifolds.
2007 IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 1–8.
Van den Berg, J., Guy, S. J., Lin, M., and Manocha,
D. (2011). Reciprocal n-body collision avoidance.
Robotics Research, 70:3–19.
Van den Berg, J. and Manocha, D. (2008). Reciprocal Ve-
locity Obstacles for real-time multi-agent navigation.
In 2008 IEEE International Conference on Robotics
and Automation, pages 1928–1935. IEEE.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. Proceed-
ings of the 2001 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition. CVPR
2001, 1:I–511–I–518.
Viola, P., Jones, M., and Snow, D. (2003). Detecting pedes-
trians using patterns of motion and appearance. Inter-
national Conference on Computer Vision, 63(2):153–
161.
Wang, X. and Sun, S. (2008). Data-Driven Macroscopic
Crowd Animation Synthesis Method using Velocity
Fields. 2008 International Symposium on Computa-
tional Intelligence and Design, pages 157–160.
Wang, Y., Dubey, R., Magnenat-Thalmann, N., and Thal-
mann, D. (2012). An immersive multi-agent system
for interactive applications. The Visual Computer,
29(5):323–332.
CouplingCamera-trackedHumanswithaSimulatedVirtualCrowd
321
