
An Architecture for Seamless Configuration, Deployment, and
Management of Wireless Sensor-actuator Networks
Edgard Neto, Rui Mendes and Lu
´
ıs Lopes
CRACS/INESC-TEC & Departamento de Ci
ˆ
encia de Computadores, Faculdade de Ci
ˆ
encias,
Universidade do Porto, Porto, Portugal
Keywords:
Wireless Sensor-Actuator Network, Middleware, Web-Service.
Abstract:
The goal of this work is to provide (non-specialist) users with the means to seamlessly setup and monitor a
Wireless Sensor-Actuator Network (WSN) without writing any code or performing subtle hardware configu-
rations. Towards this goal, we present an architecture that allows the seamless configuration, deployment and
management of applications over WSN. We explore the fact that most deployments have a common modus
operandi: (a) simple data readers running on the nodes periodically gather and send data to sinks, and; (b)
sinks process incoming data and, accordingly, issue actuation commands to the nodes. We argue that, given
the knowledge of a platform’s capabilities, its sensors and actuators and their respective programming inter-
faces, it is possible to fully automate the process of configuring, building, and deploying an application over
a WSN. Similarly, monitoring and managing the deployment can be vastly simplified by using a middleware
that supports user defined tasks that process data from the nodes, divide the WSN into regions, defined by
simple boolean predicates over data, and eventually issue actuation commands on regions.
1 INTRODUCTION AND
MOTIVATION
Nowadays, there are many hardware platforms avail-
able that can be used to deploy a Wireless Sensor-
Actuator Network (WSN), e.g., SunSPOT, Arduino,
Mica, Firefly, WASP-motes. These platforms are
based on nodes that: have distinct hardware charac-
teristics, e.g., distinct combinations of sensors and ac-
tuators; use distinct communication and routing pro-
tocols, e.g., ZigBee, XBee, BlueTooth, WiFi, and; are
programmed using distinct programming languages,
e.g., Java, nesC, C (Akyildiz et al., 2002; Lopes et al.,
2009). This heterogeneity has a negative impact on
the effort required to port, configure, and deploy a
given application onto distinct platforms. A typical
end-user wishing to deploy such an infra-structure for
personal or business use would see such challenges as
daunting. This makes WSN technology less appeal-
ing to the consumer market and certainly precludes
its wider dissemination. Despite this heterogeneity,
we argue that most end-user applications running on
WSN have similar modus operandi, namely: (a) peri-
odically reading values from sensors on the nodes and
sending them to a sink, each node generating a data-
stream for each sensed environment variable, and; (b)
executing commands on the on-board actuators of the
nodes, usually triggered by off-line processing of the
aforementioned data-streams. Based on this observa-
tion, we argue that it is possible to design and im-
plement an architecture that would allow even non-
specialist end-users to buy hardware/software kits and
seamlessly configure, deploy and manage a WSN,
without ever coding or performing subtle hardware
configurations. This philosophy of zero-programming
WSN, we believe, would go a long way in making the
technology more appealing to end-users.
The following application scenario, describing the
automation of a small garden greenhouse using a
WSN, may further clarify what we mean by “seam-
less”. The greenhouse owner would buy a kit com-
posed of a few nodes, a sink node, and a software
package to be installed, say, in his home computer.
The nodes have temperature and humidity sensors
and two pins that, in this case, will be used to turn
on and off a water sprinkler, and to open or close
a nearby window for ventilation. After placing the
nodes strategically in the greenhouse and connecting
the pins to the switches controlling the sprinklers and
vents, the user installs the software in his home com-
puter and connects the sink node to a USB port. The
software first starts a web-service, used to manage the
73
Neto E., Mendes R. and Lopes L..
An Architecture for Seamless Configuration, Deployment, and Management of Wireless Sensor-actuator Networks.
DOI: 10.5220/0004696400730081
In Proceedings of the 3rd International Conference on Sensor Networks (SENSORNETS-2014), pages 73-81
ISBN: 978-989-758-001-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

deployment. The user then starts a builder application
that, based on input such as: the kind of platform, the
readings the user is interested in and their sampling
frequencies - automatically builds and deploys a data
collection application onto the WSN. After this, the
user can manage the deployment by running a web
client, also supplied with the software, from anywhere
in the Internet with access to his home computer. The
client connects to the web-service and allows the user
to visualize the data coming from the sensors, and to
manage the WSN with tasks defined with the help of
a wizard, without writing code.
It is this level of seamlessness that we aim for, and
towards this goal we report, in this paper: an architec-
ture for monitoring WSN, which we call Sensor Ob-
servation aNd Actuation aRchitecture (SONAR), and;
prototype implementations for the SunSPOT and Ar-
duino platforms.
The remainder of the paper is divided as fol-
lows. The following section presents related work,
describes how SONAR fits in, and its contribution.
Section 3 describes the SONAR architecture. Sec-
tion 4 describes the current implementation focusing
on the data layer for the SunSPOT platform. Section 5
describes current work and the conclusions.
2 RELATED WORK AND
CONTRIBUTION
Several other architectures have been proposed to pro-
vide, at least in part, the kind of seamless configura-
tion, deployment and management described above.
TinySOA (Avil
´
es-L
´
opez and Garc
´
ıa-Mac
´
ıas, 2009)
is a multi-platform service-oriented architecture for
WSN that can be used to monitor data from differ-
ent deployments. Global Sensor Networks (Aberer
et al., 2006) introduces the concept of virtual sensor
to allow users to focus on XML-based high-level de-
scriptions of deployments to describe the applications
running on a WSN platform. Its zero-programming
philosophy is something that we pursue in SONAR.
Sens-ation (Gross et al., 2006) is a service-oriented ar-
chitecture that facilitates the development of context-
aware sensor-based infrastructures. It is aimed not
only at WSN infrastructures but also at ubiquitous
computing platforms. IrisNet (Gibbons et al., 2003)
envisions a world-wide sensor web in which users,
using standard web-services, can transparently make
queries on data from thousands to millions of widely
distributed, heterogeneous nodes. HERA (Alonso
et al., 2013) is an agent-based architecture that al-
lows the creation of a wireless sensor network using
nodes with different technologies. Corona (Khoury
et al., 2010) is a distributed query processor imple-
mented over SunSPOT WSN. MufFIN (Valente and
Martins, 2011) is a generic middleware framework
that allows for managing and programming Internet
of Things smart objects and to provide the resulting
data-streams through publish-subscribe web-services.
Most of the systems cited above provide program-
ming frameworks on top of which users may imple-
ment their own applications for WSN and manage the
deployments using a middleware. Setting up a de-
ployment and running applications on it requires a
degree of expertise from the user that is not trivial.
SONAR differs fundamentally in this respect. First,
we restrict the application domain to a very simple
scenario: nodes get readings from sensors at given
frequencies and send them to a sink; the sink sends
actuation commands to nodes based on some process-
ing of the aforementioned data. Second, we assume
that the end-user of the technology will be interested
in a holistic solution that allows him to configure and
build an application, deploy it to a WSN, and monitor
and interact with the nodes from the Internet. Most
users of WSN will not have the programming skills
nor the hardware expertise to perform this sequence
of operations without automation. Thus, we adhere to
a zero-programming philosophy, in which, except for
initial configuration information (e.g., platform, sen-
sors of interest and reading frequencies) the building
of an application is automated, based on pre-compiled
modules, and its deployment is transparent to the user,
which can henceforth monitor the deployment with
a web client application. Part of this monitoring in-
cludes a feature that is not provided by most of the
above systems and certainly not in the way SONAR
offers it: the possibility of defining simple (periodic)
tasks, disconnected from the client and persistent, that
process the data-streams generated by the data layer
and issue actuation commands on behalf of the user.
We find this feature essential to allow for the discon-
nected management of the deployment, e.g., from a
client installed in a mobile phone or tablet with only
occasional network connectivity.
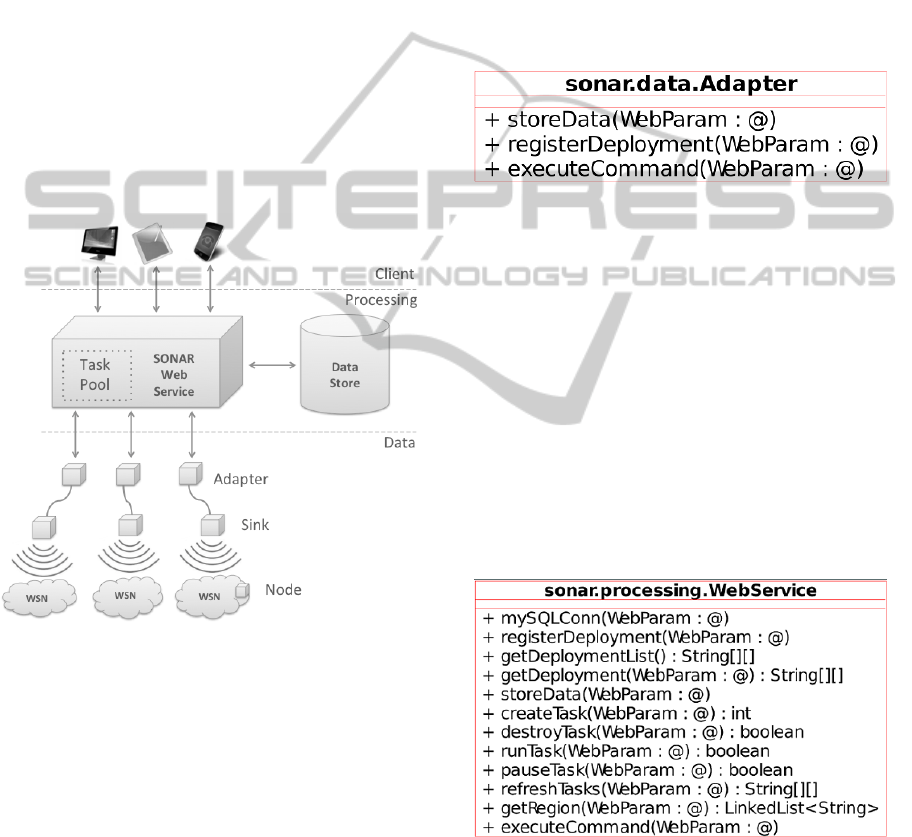
3 ARCHITECTURE
SONAR is a fairly typical 3-layer architecture, similar
for example to TinySOA (Avil
´
es-L
´
opez and Garc
´
ıa-
Mac
´
ıas, 2009), depicted in Figure 1. The data layer
abstracts the WSN deployments managed by the ar-
chitecture. These deployments generate data-streams
that are stored in a data-store in the processing layer.
This data can be queried and processed by the client
layer in order to extract information on the status of
SENSORNETS2014-InternationalConferenceonSensorNetworks
74
the nodes in a given WSN and, as a result, issue ac-
tuation commands for regions of it. A region can be
thought of a subset of the nodes in a deployment, and
implemented as a set of MAC addresses. All the in-
teraction between clients and the WSN deployments
is done through the processing layer. The architec-
ture allows clients to manage the deployments in a
disconnected way, through management tasks. The
client may forward management tasks to the process-
ing layer that periodically query the data-store, pro-
cess the query results, and eventually issue actuation
commands. These tasks run within the processing
layer and are persistent, in the sense that they are auto-
matically re-activated after a crash of the middleware.
Each of these layers is composed of multiple compo-
nents, as required to abstract away the details of the
WSN and to make data management and processing
fully generic and modular.
Figure 1: The SONAR architecture.
The data layer abstracts each wireless sensor-
actuator platform as four components. The nodes are
composed of a set of generic readers and an inter-
preter. The readers are simple tasks that periodically
read the value of a given sensor and send it to the
sink. The interpreter receives actuation commands
from the sink, identifies the actuators in question and
executes the commands. On the other hand, the sink
receives the data from the nodes and forwards it to
the adapter. The adapter is a web-service that: re-
ceives sensor data from the sink and forwards it to
the processing layer, to be stored, and; receives actu-
ation commands from the processing layer forwards
them to the sink so that they are radioed to the ap-
propriate region of the deployment. We opted to
use a web-service for the adapter so that it is pos-
sible for the sink not to be physically connected to
the server running the SONAR middleware. These
four components are provided for each WSN plat-
form supported by SONAR, as pre-compiled modules
and/or scripts. The interface of the adapter is given
(in UML format) in Figure 2. The three methods are
used to: register new deployments with the middle-
ware - registerDeployment; forward data to the process-
ing layer - storeData, and; receive commands from the
processing layer to be forwarded to a region of the
deployment - executeCommand.
Figure 2: The interface of the adapter.
The processing layer is made up of three com-
ponents. The main component is a web service that
manages the registered deployments, the data-store,
and handles client requests. As we mentioned above,
clients can forward management tasks to this web-
service allowing for automatic and disconnected man-
agement of the WSN deployments. These tasks are
executed in a task pool and are created and destroyed
by the clients with the intervention of the web-service.
The tasks periodically query the data-store, process
the data and issue actuation commands to regions in
the deployments, also with the intervention of the
web-service. The interface for the web-service is
given (in UML format) in Figure 3.
Figure 3: The interface of the SONAR web-service.
The methods in the service allow for: connecting
with the data-store - mySQLConn; registering a deploy-
ment with the processing layer - registerDeployment;
consulting the registered deployments and select-
ing one - getDeploymentList, getDeployment; storing
data in the data-store - storeData; managing client
AnArchitectureforSeamlessConfiguration,Deployment,andManagementofWirelessSensor-actuatorNetworks
75
tasks - createTask, destroyTask, runTask, pauseTask,
refreshTasks; finding the nodes that satisfy a given set
of boolean conditions - getRegion, and; sending an ac-
tuation command to the data layer - executeCommand.
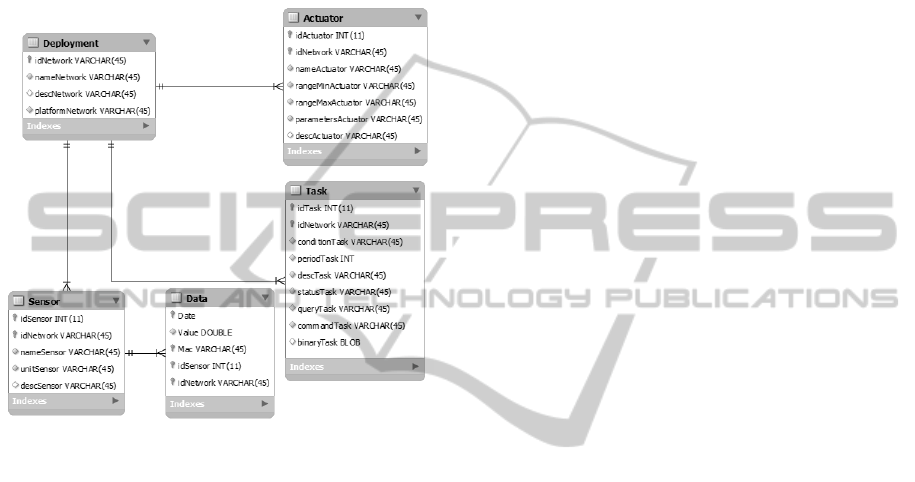
The final component of the processing layer is the
data-store that keeps information about the registered
deployments and the data they are generating. The
database tables are shown in Figure 4.
Figure 4: Database tables for the SONAR data-store.
The database tables provide a generic abstraction
for a deployment. A top-level table - Deployment,
keeps information about the deployment, e.g., its
name, an optional description and the underlying
hardware platform. It indexes three further tables that
contain information about the sensors - Sensor, and
actuators - Actuator, present in the nodes, and the tasks
- Task, managed by the processing layer and asso-
ciated with the deployment. Tasks described in the
Task table may be active (running in the task pool)
or inactive (on hold, waiting for a client to activate
them). This table also keeps the Java byte-code as-
sociated with each task object so that, in the event of
a SONAR server crash, the tasks can be restarted on
recovery (field binaryTask). The actual data produced
by the nodes in the deployment is stored in a single
table - Data, accessed through the sensor table, that
keeps the data indexed by the sensor identifier and by
the time stamp. Note that we also make the simpli-
fying assumption that all readings from sensors in the
deployments are floating point values or can be con-
verted without loss of information to this format. The
components of the processing layer constitute a fully
generic middleware, installed by end-users. Finally,
the client layer provides web clients with a GUI that
allows users to configure, build and register new de-
ployments, visualize data, and to issue actuation com-
mands to specific regions. These operations are me-
diated by the processing layer.
4 IMPLEMENTATION
In this section we describe the implementation of a
first prototype for SONAR. The deployment and man-
agement of an application onto a WSN is performed
in two steps. First, a builder application is used to
configure, build and deploy an user application onto
a WSN. The builder is responsible for generating the
platform-specific data layer. Multiple data layers, cor-
responding to different deployments and platforms
can be handled simultaneously by SONAR. In this
prototype we provide data-layers for the SunSPOT
and Arduino platforms, but we focus the following
discussion on the SunSPOT implementation that uses
a ZigBee mesh with simple radiogram-based com-
munication. For the processing layer we used JAX-
WS and an Apache TomCat HTTP Server for the web
service, and a mySQL server to implement the data-
store. As for the client layer, we provide a simple
Java-based web client but it could be developed in any
language that supports web services and for a variety
of operating systems, namely for mobile devices, e.g.,
Android, iOS.
4.1 Building the Data Layer
An essential characteristic of SONAR is that the data
layer for a deployment is automatically generated
for the user by a Java-based builder application us-
ing simple platform and application information (e.g.,
hardware model, sensors to be used, sampling fre-
quency). The descriptions of the supported platforms
are stored in a XML file that is then parsed with the
help of the JAXB tool and the information is used to
adjust the builder’s GUI to reflect the available plat-
form functionality. The XML file includes the lo-
cations of the pre-compiled modules and scripts re-
quired for the build.
The builder application runs on the computer to
which the sink device for the WSN is connected, typ-
ically to a USB port, and where the adapter web server
is going to run. This must not be a full-fledged com-
puter. Indeed, inexpensive solutions such as Gumstix
modules or Raspberry Pi run Linux OS and are fully
capable of running the builder, and of supporting both
the sink device and the adapter web server. Once the
components of the data layer: adapter, sink, and node
- are built, the adapter is executed, and the code for
SENSORNETS2014-InternationalConferenceonSensorNetworks
76

the nodes is deployed using whatever scripts are re-
quired by the platform, preferably using Over-The-
Air (OTA) programming, a feature that, although not
essential, greatly facilitates the deployment of appli-
cations. Finally, the sink application is installed and
executed (Algorithm 1).
Algorithm 1: Building a platform specific data
layer and deploying it.
Input: platform - Platform identifier
port - Hardware port for sink
config - Set of pairs (sensor,frequency)
macs - Set of mac addresses
{libs,scripts} = get code(platform);
{sink,node} = build data layer(libs,config);
run(adapter,port);
foreach mac in macs \{sink mac} do
node script = get script(scripts, mac);
run(node script,mac,node);
sink script = get script(scripts, sink mac);
run(sink script,sink mac,sink);
Once the sink application starts to run it registers
itself with the SONAR web server and forwards in-
formation describing the deployment, used to create
an appropriate table in the data-store, and a reference
for the adapter. From this point on the sink can for-
ward data received from the nodes to the processing
layer, via the adapter, and the deployment will be vis-
ible to clients that connect to the SONAR web server.
The web server will also be able to send commands
to nodes in the WSN, via the adapter and the sink.
When a client connects to the SONAR web server and
selects one of the registered deployments it receives
the description of it kept in the data-store. The inter-
face of the client is automatically adjusted to reflect
the kind of information stored for that deployment,
e.g., the available sensors in the node and the actua-
tion commands it can execute, the range of the input
parameters of the commands.
Data Layer Components
As described above, the data layer is divided into
three components: the adapter, the sink and the node.
For each platform, all sensors and actuators present
in the nodes and accessible to the programmer are
assigned internal integer codes and they are known
as such by the application. This information is con-
tained in XML files and passed to the builder applica-
tion when the user selects the platform.
The SunSPOT nodes are programed using Java
Micro Edition (Java ME) for the Squawk virtual ma-
chine (Simon et al., 2006). The node component is
made up of multiple readers, as indicated by the user,
and a command interpreter. The readers and the inter-
preter are generic pre-compiled classes. The builder
simply generates a class Node that creates an instance
of each object within running on a thread (Figure 5).
public class Node extends MIDLet {
. . .
protected void st ar tA pp ( ) throws . . . {
new Reader ( LIGHT ,5 0 0 0) . s t a r t ( ) ;
new Reader (TEMP, 30 0 0 ). s t a r t ( ) ;
new I n t e r p r e t e r ( ) . s t a r t ( ) ;
} }
Figure 5: The startApp method for the MIDLet running on
the nodes.
The code for the readers (Figure 6) is rather sim-
ple: a thread periodically wakes up, reads the value
of the appropriate sensor, and sends it to the sink.
The variable sensorID is set in the constructor (c.f.
Figure 5) whereas connection and board denote, re-
spectively, the radiogram connection used to radio the
data, and an object providing access to the hardware
sensors. More energy efficient data layers can be im-
plemented using techniques such as data aggregation
and/or sensor fusion, but we shall not address this
point here.
class Reader extends Thread {
. . .
public void run ( ) {
double v alue ;
while ( true ) {
switch ( sensorID ) {
case TEMP:
valu e = board . getTemp ( ) . g etV a l ( ) ;
break ;
case LIGHT :
valu e = board . g e tL i g h t ( ) . g etV al ( ) ;
break ;
case ACX :
valu e = board . getAccelX ( ) . g etV al ( ) ;
break ;
case ACY :
valu e = board . getAccelY ( ) . g etV al ( ) ;
break ;
case ACZ:
valu e = board . getAccelZ ( ) . g etV al ( ) ;
break ;
}
conn . w ri te D at a ( sensorID ) ;
conn . w ri te D at a ( v alue ) ;
conn . sendPackage ( ) ;
U t i l s . sle e p ( pe r io d ) ;
} } }
Figure 6: The code for a generic reader.
AnArchitectureforSeamlessConfiguration,Deployment,andManagementofWirelessSensor-actuatorNetworks
77

The code for the interpreter (Figure 7) is also quite
simple: a thread waits for a message from the sink.
When the message arrives it is unpacked and parsed
in order to determine which actuator is to be activated
and the corresponding parameters (e.g., which LED
and which RGB combination, or which PIN and turn
ON or OFF).
class I n t e r p r e t e r extends Thread {
. . .
public void run ( ) {
while ( true ) {
conn . receivePackage ( ) ;
i n t commandCode = conn . r e a d I n t ( ) ;
switch (commandCode) {
case LED :
board . setLED ( conn . r e ad I n t ( ) , . . . ) ;
break ;
case PIN :
board . setPIN ( conn . r ea d I nt ( ) , . . . ) ;
break ;
} } } }
Figure 7: The code for a generic interpreter.
The sink receives data from the nodes and for-
wards it to the processing layer. It also receives
actuation commands from the processing layer and
forwards them to the nodes. This interaction be-
tween data- and processing layers is mediated by the
adapter. In our prototype, the sink is implemented as
two threads. The first thread is an instance of class
DataForwarder that continuously listens for incoming
messages from the nodes in the WSN, unpacks the
data and forwards it to the adapter (Figure 8). The
other thread is an instance of class CommandForwarder
that receives pairs of the form (command,region) and
radios the commands to the nodes whose MAC ad-
dresses belong to the region using unicast communi-
cation (some platforms may provide multicast com-
munication for this purpose).
The adapter is a web service implemented in Java.
It is a fully generic module and is activated in the
usual way by placing the appropriate class bundle in
the Apache TomCat folder installation of the com-
puter. The implementation is quite straightforward as
can be inferred from the interface (Figure 2).
The communication between the sink and the
adapter is implemented through a hardware abstrac-
tion called port that implements a simple, low level
read/write protocol on a OS serial device. This shared
device must be known to the adapter when it starts.
The communication protocol is platform independent
and allows the code for the adapter component to be
fully generic as well.
class DataForwarder extends Thread {
. . .
public void run ( ) {
i n t sensorID ;
double v alue ;
S t r i n g mac ;
while ( true ) {
conn . receivePackage ( ) ;
mac = conn . readMAC ( ) ;
sensorID = conn . readCode ( ) ;
valu e = conn . readValue ( ) ;
adap t er . st o reDa ta ( sensorID , value , mac ) ;
} } }
Figure 8: The code for the data forwarder class in the sink.
4.2 The Processing Layer
As we have mentioned above, the processing layer is
composed of three parts: a data-store, a web service
and a task pool.
The data store keeps the tables described in Fig-
ure 4 (Section 3). The mySQL server must be run-
ning before any deployment is attempted. Initially
the database is empty and new tables are constructed
as new deployments register themselves with the pro-
cessing layer. Each sink module contains the code
necessary to register the deployment with the process-
ing layer and to build the tables in the data-base. Each
deployment is uniquely identified by a key, the MAC
address of the device that runs the sink module (e.g.,
in the SunSPOT platform this would be the MAC ad-
dress of the basestation).
The web service controls the data flow in the ar-
chitecture. It is implemented as a Java web service
that implements the interface given in Figure 3 (Sec-
tion 3). Upon initialization the web service checks
for tasks marked as active in the data-base tables (Al-
gorithm 2). For each record found, it gets the corre-
sponding serialized object, deserializes it and adds it
to the pool of (running) tasks. After this step it con-
tinues with the usual the server loop (Algorithm 2).
This initialization step is important as, in case the
server crashes, all the active tasks previous to the
crash event, can be restarted automatically. This is
of course possible because a serialized copy of each
task is maintained in the data-base.
The task pool is managed through the web service in-
terface. The tasks running on the pool can be periodic
or one-shot, as specified by clients. Tasks are created
by clients using the method createTask in the web ser-
vice that registers the task in the appropriate table for
the deployment in the data-store (Algorithm 3).
When tasks are first created they are always in-
active. To activate a task the method runTask is used
SENSORNETS2014-InternationalConferenceonSensorNetworks
78
Algorithm 2: Initializing SONAR.
init pool();
records = db get active tasks();
foreach record in records do
bytes= get bytes(record);
task = deserialize(bytes);
pool
add(task);
begin server loop();
Algorithm 3: Registering a task with SONAR.
Input: task - the task to be registered
task info = get info(task);
bytes = serialize(task);
db store(task info,bytes);
that attaches the task to one of the threads in the pool
(Algorithm 4).
Algorithm 4: Running a task in SONAR.
Input: task info - the task to be run
record = db make active(task info);
bytes = get bytes(record);
task = deserialize(bytes);
pool add(task);
Typically, tasks periodically query the data store
for data returned from the deployment and process it.
As a result of that processing actuation commands for
a region of the deployment may be issued. These are
forwarded to the adapter using the executeCommand
method in the web service interface. Clients may
permanently remove tasks by invoking the method
destroyTask with the task identifier (Algorithm 5).
Besides the task being removed from the thread
pool (if it is active), the record of the task in the data-
store will also be removed. Finally, a task may also
be temporarily paused be a client - pauseTask, and ex-
ecuted again - runTask.
4.3 The Client Layer
The client layer is implemented as a Java-based GUI.
When it is started it connects to the SONAR web ser-
vice and requests information about all registered net-
works. This information is retrieved from the data-
store via the web service. At this point we are not
addressing privacy and/or security issues that are rel-
evant in this context, e.g., who accesses information
about a network or who can manage it.
Algorithm 5: Removing a task from SONAR.
Input: task - the task to be killed
pool remove(task);
db remove(task);
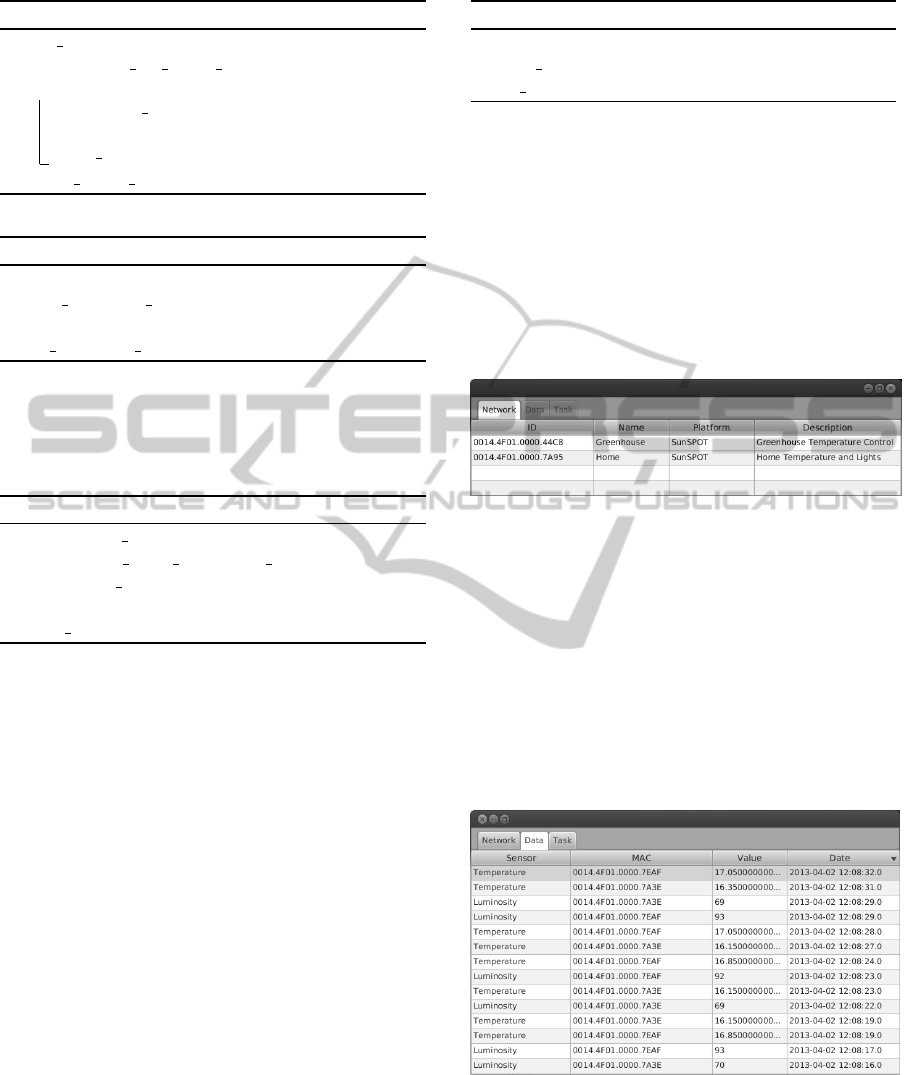
The Network Tab
The list of registered networks is provided in the “net-
work tab” of the GUI (Figure 9). When a user selects
one network from this list, the GUI is adapted to ac-
count for the different sensors and actuators supported
by the network and for the current tasks associated
with it. The user may then choose to visualize data, in
the data tab, or manage the network, in the task tab.
Figure 9: The network tab.
The Data Tab
In the current prototype, the “data tab” is quite sim-
ple, listing all readings that have been sent by nodes
in the network. Each entry describes the sensor that
reported the reading, the MAC address of the corre-
sponding node, the reading, and the time-stamp (Fig-
ure 10). The readings are time-stamped in the sink,
when the data is received from the nodes and before
it is forwarded to the processing layer.
Figure 10: The data visualization tab.
The Task Tab
All the management tasks associated with a network
are listed in the “task tab” (Figure 11). SONAR tasks
are very simple. To specify one, the user must select a
AnArchitectureforSeamlessConfiguration,Deployment,andManagementofWirelessSensor-actuatorNetworks
79

frequency associated with the task, what readings are
interesting and what method is used to evaluate them
(e.g., time window, average), a conditional expression
on those readings, and a set of actuation commands
that must be sent to all sensors for which the condition
holds. Such a set of nodes forms a region. From an
implementation point of view, the nodes are identified
by their unique MAC addresses, so a region is just a
set of MAC addresses.
Tasks are implemented internally using a small
domain specific programming language. The exam-
ple in Figure 11 shows one such task, for a WSN that
manages a greenhouse. Every 5 minutes, it reads the
last 20 minutes of temperature data, takes the aver-
age and checks whether the value is above 30 Celsius.
It then sends actuation commands to all nodes with
temperatures above 30 Celsius to activate the pins that
switch on the sprinkler system and open the ventila-
tion windows.
Figure 11: The task management tab.
Users do not edit tasks explicitly. Rather, a wizard
is provided to guide users in the specification of tasks,
without the need to write code. It is the wizard that
then automatically generates the code for the tasks.
Submitted tasks are compiled by the client and an
internal representation, similar to an annotated AST,
is produced. Finally, a request is sent to the SONAR
web server to register and start running the task, as
described in Section 4.2. When the client receives an
acknowledgment from this request, it adds the task to
the list in the task tab.
5 ONGOING WORK AND
CONCLUSIONS
Besides the SunSPOT platform, we have also imple-
mented support for Arduino based WSN, more specif-
ically, meshes of nodes composed of a Mega 2560
microcontroller with a XBee Series 2 module and
SHT15 digital humidity and temperature sensors. We
are currently developing a more powerful data vi-
sualization and processing tool for the end-user that
makes use of geographical information allowing de-
ployments to be represented over maps or satellite im-
ages. This graphical view can be used to visualize the
status of each node in a mesh and to manage tasks.
The goal is to make the user focus on the data and on
the management of the WSN, and abstract away from
low level hardware issues and raw data representa-
tions. The prototype here described shows promise in
the sense that it allows the seamless building, deploy-
ment and management of WSN in both the SunSPOT
and Arduino platforms. Despite this, more work on
supporting more platforms and new deployments is
required to assess its usability, to fully validate the
approach proposed in this paper.
ACKNOWLEDGEMENTS
Projects MACAW (FCT contract PTDC/EIA-
EIA/115730/2009) and RTS (contract NORTE-07-
0124-FEDER-000062).
REFERENCES
Aberer, K., Hauswirth, M., and Salehi, A. (2006). A Mid-
dleware for Fast and Flexible Sensor Network Deploy-
ment. In Very Large Data-Bases (VLDB’06), pages
1199–1202. ACM Press.
Akyildiz, I., Su, W., Sankarasubramaniam, Y., and Cayirci,
E. (2002). A Survey on Sensor Networks. IEEE Com-
munications Magazine, 40(8):102–114.
Alonso, R., Tapia, D., Bajo, J., and et al. (2013). Imple-
menting a Hardware-Embedded Reactive Agents Plat-
form Based on a Service-Oriented Architecture over
Heterogeneous Wireless Sensor Networks. Ad-Hoc
Networks, 11(1):151–166.
Avil
´
es-L
´
opez, E. and Garc
´
ıa-Mac
´
ıas, J. A. (2009).
TinySOA: a Service-Oriented Architecture for Wire-
less Sensor Networks. Service Oriented Computing
and Applications, 3(2):99–108.
Gibbons, P., Karp, B., Ke, Y., Nath, S., and Seshan, S.
(2003). IrisNet: an architecture for a worldwide sen-
sor Web. Pervasive Computing, 2(4):22–33.
Gross, T., Egla, T., and Marquardt, N. (2006). Sens-ation:
a Service-Oriented Platform for Developing Sensor-
Based Infrastructures. International Journal of Inter-
net Protocol Technology (IJIPT), 1(3):159–167.
Khoury, R., Dawborn, T., Gafurov, B., and et al. (2010).
Corona: Energy-Efficient Multi-query Processing in
Wireless Sensor Networks. In Database Systems for
Advanced Applications, volume 5982 of LNCS, pages
416–419. Springer Berlin Heidelberg.
SENSORNETS2014-InternationalConferenceonSensorNetworks
80

Lopes, L., Martins, F., and Barros, J. (2009). Middleware
for Network Eccentric and Mobile Applications, chap-
ter 2, pages 25–41. Springer-Verlag.
Simon, D., Cifuentes, C., Cleal, D., Daniels, J., and White,
D. (2006). Java on the Bare Metal of Wireless Sen-
sor Devices – The Squawk Java Virtual Machine. In
Virtual Execution Environments (VEE’06).
Valente, B. and Martins, F. (2011). A Middleware Frame-
work for the Internet of Things. In The Third Inter-
national Conference on Advances in Future Internet
(AFIN 2011), pages 139–144. Xpert Publishing.
AnArchitectureforSeamlessConfiguration,Deployment,andManagementofWirelessSensor-actuatorNetworks
81
