
An Adaptable Framework for Interoperating Between Wireless Sensor
Networks and External Applications
Thanh-Dien Tran
1
, David Nunes
1
, Carlos Herrera
2
and Jorge S
´
a Silva
1
1
Department of Informatics Engineering, University of Coimbra, P
´
olo II, Pinhal de Marrocos, Coimbra 3030-290, Portugal
2
Escuela Polit
´
ecnica Nacional in Ecuador, Quito Canton, Ecuador
Keywords:
Wireless Sensor Networks, Integration, Interoperability, Adaptability, STDL.
Abstract:
Wireless Sensor Networks (WSNs) are considered the bridge to connect physical and digital worlds and thus
an important element of the Future Internet. Consequently, integrating WSNs with external applications is
an undeniable requirement. A gateway-based solution in which the sensed data and functions of WSNs are
exposed as web services is a common approach. The problem of current integration solutions for WSNs is
their adaptability, i.e., the ability to reuse gateways and proxies in a multitude of sensor networks with different
types of applications and data frames. In this paper, we present our proposal for this problem by proposing a
framework that uses a language for describing the traffic in sensor networks named Sensor Traffic Description
Language (STDL). In order to reuse the framework on a new sensor network, it is only necessary to describe
the network’s frame structures using STDL.
1 INTRODUCTION
Wireless Sensor Networks (WSNs) have been receiv-
ing a great deal of attention from both research and
industrial communities due to their potential in al-
most every field including military, industrial, health-
care and smart home environments. The major func-
tions of WSNs are monitoring and controlling their
target environments. They are as a bridge between
physical to digital worlds. Therefore, in most of the
cases, WSNs cannot operate in a complete isolation,
and controlled by central servers, which host Supervi-
sory Control and Data Acquisition (SCADA) systems
or other applications.
Although it has been proven that it is possible to
implement both IP protocol stack, i.e., uip (Dunkels,
2003), 6LowPAN (Hui and Culler, 2008), and web
services (Priyantha et al., 2008), (Guinard, 2009),
(Dawson-Haggerty et al., 2010), and (Shelby et al.,
2013) on sensor nodes, this approach is not a solu-
tion for all types of sensor networks. Notably, allow-
ing direct access to sensors from the Internet brings
many challenges such as security, energy efficiency
and routing. Altogether, it is necessary to have an in-
frastructure that easily, securely and efficiently sup-
ports the interoperability between sensor networks
with external applications.
At the highly abstract level, the interoperability
framework has to deal with two fundamental func-
tions: (1) providing an interface for external applica-
tions to interact with the sensor networks; (2) commu-
nicating with the sensor networks. The first function
can be solved by exposing the data and functionality
of sensor networks using web services as the works
in (Grosky et al., 2007), (Guinard, 2009), (Tran et al.,
2012). On the other hand, the second one is a chal-
lenge because of the differences in communication
protocols between WSNs and other networks, and di-
versity of possible sensor data formats. To deal with
these issues, we can either implementing the same
protocol on both environments or adding a gateway
or a proxy between them.
The problem of current gateway-based integration
solutions is their adaptability, i.e., the ability of the
gateway or proxy to be reused, unchanged, for other
networks with different data frames. It is difficult or
even impossible to create a standard for the structure
of the data inside the frame because there are so many
possible formats. In this paper, we present our ap-
proach for this problem. The Sensor Traffic Descrip-
tion Language (STDL) was proposed for describing
the structure of the sensor networks’ data frames, al-
lowing the framework to be adapted to a diversity of
protocols and applications without reprogramming.
The remainder of the paper is organized as fol-
lows: section 2 summarizes the main related works.
95
Tran T., Nunes D., Herrera C. and Sá Silva J..
An Adaptable Framework for Interoperating Between Wireless Sensor Networks and External Applications.
DOI: 10.5220/0004710000950102
In Proceedings of the 3rd International Conference on Sensor Networks (SENSORNETS-2014), pages 95-102
ISBN: 978-989-758-001-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Then the proposed model is presented in section 3.
Section 4 describes the STDL, the illustrated exam-
ples, and STDL engine. The final section concludes
the paper.
2 RELATED WORKS
Recent researches has proven that it is possible to im-
plement both IP protocol stack (Dunkels, 2003) and
6LowPAN (Hui and Culler, 2008) and web services,
e.g., Tiny web services (Priyantha et al., 2008), Web
of Thing (WoT) (Guinard, 2009), sMAP(Dawson-
Haggerty et al., 2010), CoAP (Shelby et al., 2013)
on sensor nodes. However, the limitations of sensor
nodes in terms of memory, computation, communica-
tion and battery power make it inefficient to deploy
the full TCP/IP protocol stack and web services into
all sensor nodes. In addition, allowing direct access
to sensors from the Internet brings many challenges
such as security and routing. To deal with these prob-
lems, some optimal mechanisms such as IP compres-
sion (e.g., 6LowPAN) (Hui and Culler, 2008), HTTP
compression and UDP binding (Shelby et al., 2013),
(Priyantha et al., 2008), EBHTTP (Tolle, 2010), and
packed JSON (Dawson-Haggerty, 2010) need to be
applied to the original standards. It is important to
note that these mechanisms lead to incompatibility
between the original standards and those for sensor
networks. Consequently, a bridge, proxy, or gateway
is still needed for interoperability between WSNs and
external applications. As a matter of fact, the gateway
or proxy approach for interoperating between WSNs
and user applications will continue to exist in the fore-
seeable future.
Other works on integrating WSNs with the Inter-
net environment includes GSN (Aberer et al., 2007),
VIP Bridge (Shu et al., 2007), SensorWeb (Grosky
et al., 2007). Most of these, excluding VIP Bridge,
expose the functionalities of sensor nodes and net-
works as web services, which makes the interoper-
ability over the Internet easier. However, the current
gateway-based integration solutions are not adaptable
to different types of data formats. This means that the
new drivers or parsers need to be developed when ap-
plying the gateway to a new sensor network or when
adding new sensors or applications to an existing one.
Open Geospatial Consortium’s (OGC) (OGC,
2013) have been working on standards, i.e., Sensor
Web Enablement (SWE) specification series, for mak-
ing sensors discoverable and interoperable over the
Internet. SWE consists of a series of open standard
specifications for discovery of sensors and sensor sys-
tems, for exchanging and processing sensor obser-
vation, and for tasking of sensor and sensor system.
The SWE standards can be divided into 2 groups:
(1) models and schemes for encoding sensors and
sensor observations; and (2) open web service inter-
faces. The former consists of Sensor Model Lan-
guage (SensorML), and Observations and Measure-
ments (O&M). The latter comprises Sensor Observa-
tion Service (SOS), Sensor Planning Service (SPS),
and PUCK (OGC, 2013). The SOS exposes a web
service interface for the client applications to retrieve
either description or measurement from sensors. The
response formats of SOS are in XML-based data en-
coding using SensorML or O&M. SensorML is used
to return descriptions, while O&M specification is
employed when the results are the measurements and
observations. In addition, the user can task the sen-
sors to perform appropriate actions through SPS web
service interface. The SPS provides a list of obser-
vations that the users can assign to sensor networks.
The PUCK protocol (OReilly, 2012) was integrated
into SWE in 2011 to enable plug and play sensor net-
works.
The above solutions mainly provide a method for
client applications to access sensor data through the
gateway. An equally important aspect is how the gate-
way interacts with the sensors and sensor networks,
how it can discover, analyze, extract data and issue
command to WSNs. The traditional approach is to re-
quest the sensor nodes to organize the data according
a specified format required by the provided drivers as
in GSN (Aberer et al., 2007). Another method is to
add a software driver or analyzer as in GSN (Aberer
et al., 2007), SensorWeb (Grosky et al., 2007). In
order to make the sensors as plug and play compo-
nents of the gateway, the IEEE 1451 family stan-
dards (NIST., 2009) has been proposed. One of the
core components of these standards is the definition
of Transducer Electronic Data Sheets (TEDS), which
are embedded into sensors or actuators to allow the
interoperability between different manufacturers, and
to make their data analyzable. Although it provides
a standard way to exchange data, the software drivers
and TEDS documents also need to be manually devel-
oped and installed on every sensors. Recently, SWE
integrated PUCK protocol (OReilly, 2012) to store
and automatically retrieve metadata and other infor-
mation to/from the sensor nodes. The information
stored in the nodes’ memory is called PUCK memory
and may include the IEEE 1451 TEDS, SensorML, or
even the driver code. The gateway, which supports
PUCK protocol, can automatically retrieve and uti-
lize the information from the sensor node when it is
installed (OReilly, 2012). If the driver code is avail-
able on the sensor node, it is downloaded into and ex-
SENSORNETS2014-InternationalConferenceonSensorNetworks
96
ecuted on the host to translate the sensor raw data,
using TEDS or SensorML, to the required format,
e.g., SWE O&M object. The PUCK protocol brings
another level of plug and play capability for sensor
devices. However, it requires implementing PUCK
documents on every sensor device. In addition, to
make a device as plug and play, the driver code has
to be physically stored in the PUCK memory before
deployment. Consequently, it is not appropriate for
WSNs that comprise many sensor nodes.
The work in this paper focuses on the solution for
analyzing and extracting useful data from every sen-
sor data frame between the framework and WSNs.
It employs the sensor description method similar to
TEDS (NIST., 2009) or PUCK documents (OReilly,
2012). However, it does not require adding the de-
scription documents to every sensor but only to the
proxy. For the interaction with client applications, the
proposed framework employs open web service stan-
dards similar to those of SWE (OGC, 2013). How-
ever, RESTful web services (Richardson and Ruby,
2007) and an encoding method similar to that those
used in sMAP (Dawson-Haggerty et al., 2010) are
employed. The following sections present the general
integration framework, STDL, and its prototype.
3 THE GENERAL MODEL FOR
INTEROPERABILITY
The main aspects that were considered when design-
ing this model were interoperability, reusability, scal-
ability and extensibility. The first aspect refers to the
ability of the gateway to provide methods for external
application to easily and transparently interact with
sensor networks. The reusability, also considered as
adaptability, refers to the ability to use the proxy or
gateway for different WSNs without reprogramming
or modifying. The third concern is about the ability of
the model to handle the increasing number of sensor
nodes and networks. The final aspect, extensibility,
is about the ability to easily add new components to
the model. Consequently, we come up with a general
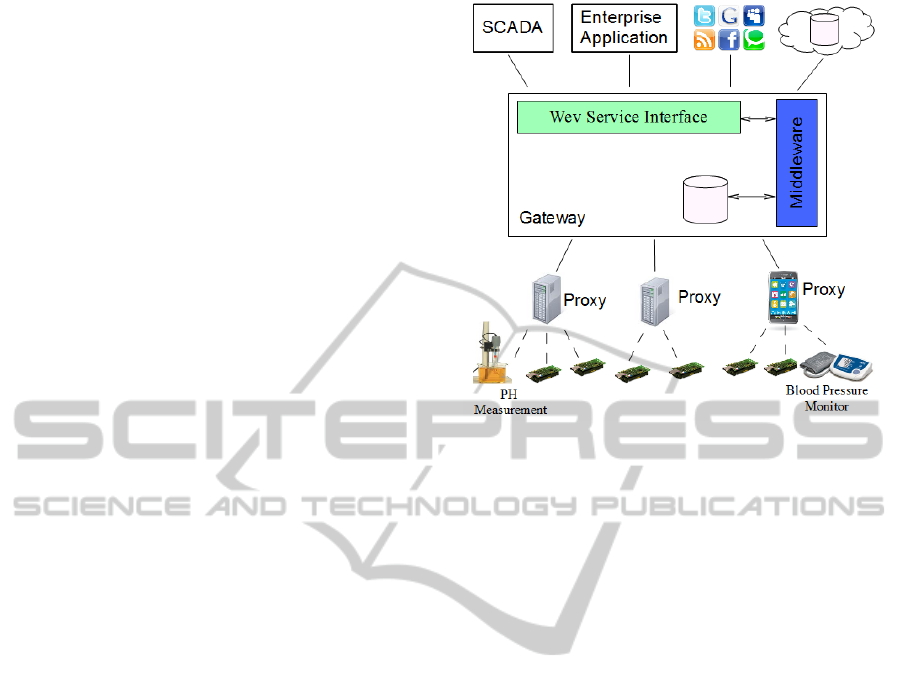
model as presented in Fig. 1.
In order to create a system that is able to re-
spond to a large number of concurrently requests, we
employed a multi-layered software architecture. As
shown in Fig. 1 the model uses a proxy and gateway
as a mediate layer for interoperability between sensor
networks and the client applications. The proxy in-
teracts directly with the WSNs, getting and analyzing
data frames from the sensor networks, and then send-
ing them to the gateway for storage. It also passes
commands from the user applications to the sensor
Figure 1: The General Model for Interoperability.
networks. The gateway allows front-end applications
to interact with sensor networks, acting as a bridge
between the sensor networks and the Internet. Both
proxy and gateway may also comprise some other fa-
cility services such as authentication and authoriza-
tion.
Both the proxy and gateway are designed to use
an event-based principle. Developers can register the
listeners that capture events of interest that happen in
the network. For instance, to support localization, one
can register to the ”data frame arrival” event of the
proxy and send location request to the localization en-
gine on the gateway. This event-based model allows
the system to be easily extensible.
It is worth noting that every sensor network is as-
sociated with at least one proxy and that a proxy can
serve more than one sensor network. Every proxy is
associated with at least one gateway to communicate
the traffic of the sensor network to the data storage.
There can exist multiple proxies and gateways in a
single network. This type of architecture makes the
proposed model scalable to be applied in large sensor
networks. The detailed description of the middleware
of the gateway was presented in (Tran et al., 2012).
This paper focuses on the components of the proxy
that make the integration framework adaptable with
different types of sensor networks.
The proxy is responsible for obtaining the data
frame from the sensor networks, analyzing and pub-
lishing them to the gateway. In addition, it also ac-
cepts commands from the user applications, and sends
them to the sensor networks. The core components of
the proxy are shown in Fig. 2. The proxy consists of
Traffic Listener and Command Sender. Because there
AnAdaptableFrameworkforInteroperatingBetweenWirelessSensorNetworksandExternalApplications
97

are several methods for communication between sen-
sor networks and the proxy, it is necessary to have
different type listeners, one for each communication
method. Currently, we implemented two types of traf-
fic listeners on the proxy: one for serial port and the
other for IP communication.
Figure 2: The Components of the Proxy.
The most important component of the proxy is the
STDL engine that makes the proxy adaptable to dif-
ferent sensor networks. It is responsible for translat-
ing the raw data frame into meaningful data for other
components. When receiving a raw frame from the
listener, the STDL engine translates it into the one
or more messages and raises the corresponding data
events, which are handled by other components such
as the Data Publisher or Localization Requester. The
Data Publisher, when triggered by a data event, gets
associated message and sends it to the gateway for
storage. The Location Requester collects the neces-
sary data from multiple events and sends them to gate-
way’s localization engine, which estimates the posi-
tion of a device.
The Request Receiver forwards user application
commands coming from the gateway to the proxy en-
gine, which translates them into a format that the sen-
sor nodes can process. The engine then passes the
command to the Command Sender component which
sends it to the sensors. The STDL engine is inde-
pendent from the type of sensor networks and can be
reused without reprogramming. The details of STDL
document are presented in the following section.
4 SENSOR TRAFFIC
DESCRIPTION LANGUAGE
(STDL)
The STDL is an XM-based (Bray et al., 2006) lan-
guage that adds adaptability to the infrastructure for
sensor networks. It uses XML tags in a general
enough way to describe structures for many different
types of data frames. It is both formal and concise
but simple and easy for developers to use. Like other
languages, STDL provides a set of key words (vo-
cabulary) and rules (grammar) that constrain how key
words are combined together to describe the structure
and permissible content of the data. As STDL is a
XML-based, it is natural to use XML schema (XSD)
(Gao, et al., 2012) for creating its constraint rules.
Because XSD is a text-based language, reading it di-
rectly is tedious and it is difficult to convey its con-
cepts. Therefore, it is useful to present the syntax of
the language graphically.
Fig. 3 shows the elements for specifying data
frames. Each data frame can be described by three
elements: (1) attributes; (2) header; and (3) content.
The attributes uniquely identify a specific frame and
determine the table of the data storage into which the
frame’s data should be saved. The header element de-
scribes how to get the identification data from the in-
stance frame, i.e., the raw frame received from a sen-
sor network. The content element describes what data
needs to be extracted from the instance frame. The
following subsections describe these components.
Figure 3: The General Content Model of STDL.
4.1 Frame Identification
The first issue that needs to be considered is the de-
scription of information that distinguishes the differ-
ent frame types of a sensor network. The attributes of
an STDL frame element are used to specify this infor-
mation. Their contents can be divided into two func-
tions: (1) identifying the raw frame; and (2) naming
the frame (semantic). The former comprises the type,
SENSORNETS2014-InternationalConferenceonSensorNetworks
98

subtype, length, and lengthPosition attributes. The
latter includes the name and id attributes.
The type attribute contains the value correspond-
ing to the type field in the raw frame. It is the key
for the STDL engine to associate the raw frame to its
description in the list of frame structures for that net-
work, each one describing the composition of a raw
message. It is important to note that in some cases the
type attribute cannot uniquely determine the frame.
Hence, the optional subtype attribute comes into to
play. Both attributes accept non-negative integer as
their values and the combination of both allows ev-
ery possible frame type to be identified. During the
analyzing process, when the value(s) of a type and/or
subtype (if applied) field(s) of a received raw frame
match those of a stored frame structure, the STDL en-
gine will use this frame structure as a reference to ex-
tract the rest of the data.
In some cases, the sensor frame does not have
a length field but a fixed length, instead. In these
situations the optional length attribute can determine
whether a raw frame is valid. If this field exists and
its value is greater than 0 then the matching raw frame
has a fixed length. A lengthPosition attribute is used
to specify the start position from which length is to
be considered. The default value is 0 and means the
length applies to the entire frame.
The data extracted from the raw frame eventually
needs to be stored for further processing. This means
that the proxy must know where to send the decoded
data. Because a table is usually considered the out-
ermost element of a database with which an outside
entity may interact, we employ the table’s name as a
mechanism to link a frame to the data storage. The
name attribute of the frame element serves this pur-
pose and its value indicates the corresponding table
name in the database into which the content of this
type of frame should be stored.
The id attribute is used as the unique identifier of
a frame, i.e., its primary key. The usage of this at-
tribute will be discussed in the section that describes
the frame content.
Because the field data type is used intensively in
describing the header and the content of a frame, the
next subsection is dedicated to this data type.
4.2 Field Description
The most important and useful aspect of STDL is to
help the engine in gathering the needed information
and meaning from the raw frames. Therefore, STDL
must have the ability to specify the fields’ positions as
well as explain how to extract and decode each one.
In addition, the semantics of each field are also very
important because a value extracted from a raw frame
is useless unless the users know their meaning. The
field type is designed to fulfil this requirement. This
type has six attributes: name, unit, dataType, startPo-
sition, numberOfBit, byteOrder.
The last four attributes are used by the STDL en-
gine to extract and to process raw data. The start-
Position attribute specifies the position of the field in
the raw frame. The numberOfBit attribute indicates
its length in bits. Both these attributes are restricted
to non-negative integers. The dataType attribute is
used to indicate the type of the data. Currently, STDL
supports the following data types: string, uint8, int8,
uint16, uint16, uint32, int32, ulong, and long. The by-
teOrder attribute specifies the encoding method and
its value is either ’little endian’ or ’big endian’ for
little endian and big endian byte orders, respectively.
By default, ’little endian’ is assumed. The other two
attributes are used to add semantics to the data field.
The name attribute is used to name the described field,
in the same manner as its respective table in the data
storage. The unit attribute is a string that indicates the
measurement unit of data content of the field.
4.3 Frame Header Specification
The objective of the frame header is to help the en-
gine to matching a raw frame to a frame description.
Frames are intercepted through the start of frame, i.e.,
a unique sequence of bits that marks the beginning
of a new frame. As mentioned in previous sections,
a raw frame can be uniquely specified by a type and
an optional subtype. The STDL header section of a
frame specification dictates how the above fields are
retrieved from a raw frame. It is worth noting that
the header specification is not used to describe the
real header of the frame but its main purpose is to get
enough information to uniquely identify the descrip-
tion of a particular raw frame.
As shown in Fig. 3, one of the required elements
of a frame header is the startOfFrame. This element
is useful to deal with the problem of heterogeneity
and diversity of frames in WSNs, since different sen-
sor networks use different start of frame sequences.
The content of this element can be a sequence of bits
or a list of hexadecimal numbers in the form of 0xnn
... 0xnn. It also has an numberOfBit attribute which
specifies the number of bits of this field.
The next three elements, typeField, subtypeField,
and lengthField, specify how to get the values of the
type, subtype and length fields from the raw frame, re-
spectively. These elements are described by the field
type discussed in previous section. The first two el-
ements are crucial because they help to associate a
AnAdaptableFrameworkforInteroperatingBetweenWirelessSensorNetworksandExternalApplications
99

frame description to the raw frame.
Besides these essential elements, the description
of a frame’s header may also comprise three optional
elements: sender, destination and gateway. These el-
ements are included in the header part because they
are present in most of the frames. The purpose of
these elements, as implied by their names, is to de-
scribe the address of the original transmitter, receiver
and gateway devices, respectively. These elements
have the same structure as that of the previous three
elements.
4.4 Frame Content Specification
The objective of frame content specification is to
specify what information is needed and how to get it
from instance frames. Working experience with sen-
sor networks showed us that frames in WSNs can be
organized into three main categories: simple frame,
data table frame and complex frame.
As shown in Fig. 4, the simpleFrame type is used
to describe the frames that merely consist of a list of
data fields. Each field of a simple frame corresponds
to a field of the raw frame and is described by the field
type discussed in the previous section.
Figure 4: The General Content Model of STDL.
The second type of frame is called data table be-
cause its body contains a list of repeated measurement
of different types of data. This type of frame can
be used to describe aggregated data in WSNs. One
possible scenario for its usage is when a sensor node
buffers multiple samples before offloading data to the
base station. Another possible case is when the inter-
mediate nodes combine their collected data with that
received from other nodes into a single frame and then
send it to the base station. As shown in Fig. 4, the
content of a dataTable frame is divided into two parts
described by nonRepeatedFields and repeatedFields
elements. The former comprises a list of elements
that describe the information related to repeated data
in the raw frame such as its start position (startPosi-
tionOfData) and its number of elements (dataLength).
It also comprises a list of elements to be stored in the
data storage such as sender, time, etc. The latter is
used to describe the repeated fields in the data por-
tion, with each field being described by the field data
type.
Besides these two fundamental types of frames,
when working with real world sensor networks it may
happen to run into a scenario where a frame may con-
tain one or more simple frames or data table frames.
We deemed such frames as ”complex” and described
them using the complexFrame element. Because the
complex frame contains other frames, it is necessary
to describe composing frames as a regular frames and
then refer to them in the complex frame. Conse-
quently, specifying a complex frame is rather simple.
As shown in Fig. 4, complex frames consist of a list
of subframe elements which only have one attribute
named frameID. This attribute refers to the id attribute
of another frame described in the same document.
Additionally, there is also some additional informa-
tion that describes the general context of the frame.
This information is specified using the description el-
ement.
4.5 Illustrated Example
To help us illustrate how to use STDL to describe the
raw frames, let us assume a sensor network that cre-
ates a raw frame as the one showed in Fig. 5.
Figure 5: A example of a Simple Raw Frame.
SENSORNETS2014-InternationalConferenceonSensorNetworks
100
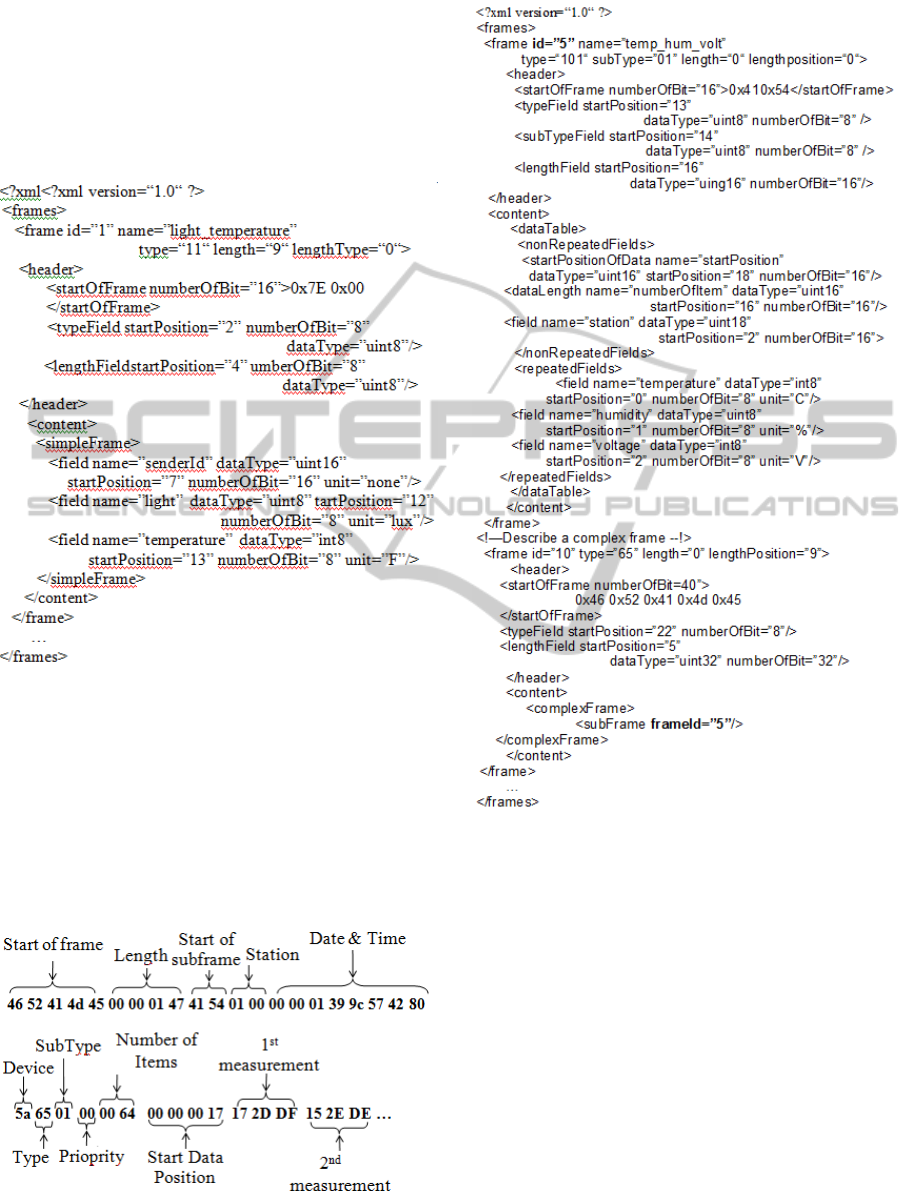
The STDL description of this frame is shown in
Fig. 6. In this example, it is assumed that the only
information needed is the sending node identifica-
tion and the light and temperature values. Conse-
quently, the content element of the frame description
only comprises three elements: senderId, light and
temperature, respectively (see Fig. 6).
Figure 6: Description of the Raw Frame in Fig. 5.
Another example is shown in Fig. 7, which is a
complex frame containing a data table frame. This is a
frame structure used in a sensor network developed by
Eneida (Eneida, 2012). The example frame consists
of three repeated fields: temperature, humidity and
voltage. The STDL description for this type of frame
is shown in Fig. 8. In this case, because the complex
raw frame does not have a field type to identify it, that
of the first inner frame is used instead.
Figure 7: An Example of a Complex Frame Containing a
Data Table.
Figure 8: STDL Description for the Content of the Raw
Frame in Fig. 8.
4.6 STDL Engine
The STDL engine is the core part of the proxy. As
shown in Fig. 2, the STDL document acts as the
”brain” of the engine, guiding it through the process-
ing of a received raw frame. The STDL document
maps the frame’s structure and allows the engine to
extract the necessary data. In addition, it also accepts
commands in form of messages from the Request Re-
ceiver component of the proxy and transforms them
into the raw packets to send to the sensor network. In
order to make the proxy more flexible and extensible
an event based model is employed in the STDL engine
where an event is raised after the engine processes a
raw data frame. Another important point is that the
AnAdaptableFrameworkforInteroperatingBetweenWirelessSensorNetworksandExternalApplications
101

engine employs the JSON encoding method (Crock-
ford, 2006) for encoding data in event’s message.
To illustrate how the JSON message looks like,
let us examine the simple frame in Fig. 5. From
the frame description in Fig. 6, the STDL engine
knows how to extract the necessary fields from the
raw frame. It also knows how to add the semantics to
the extracted data to compose the message to include
in the event. Consequently, by combining this infor-
mation, the engine creates the following JSON object
message:
{”light temperature”:[{”senderId”: 2, ”light”:50,
”temperature”:64} ]}.
It is worth noting that, in this case, an array of objects
is used even though there is only one object. The rea-
son for this is that we can use only one message for-
mat for all events raised by STDL engine.
5 CONCLUSIONS
Interoperating between WSNs and application envi-
ronments is an undeniable demand. The architecture
proposed in this paper allows for the use of integration
infrastructure with diverse types of sensor networks.
By using STDL, developers only need to describe the
data frame structures when applying the framework
to a new sensor network. The event-based approach
also makes it very easy to add new components to the
framework. In addition, exposing data and function-
alities as web services greatly facilitates the use of
WSNs in mash up applications that use them for mon-
itoring, controlling, and visualizing real world data.
All of the proposed methods were implemented and
are running in our test platforms. As a future work, we
will try expand the interface for sending commands to
the sensor network, in order to make it easier to find
and understand which commands the WSNs offers.
ACKNOWLEDGEMENTS
The work presented in this paper was partially fi-
nanced by the iCIS project (grant CENTRO-07-ST24-
FEDER-002003).
REFERENCES
Aberer, K., Hauswirth, M., and Salehi, A. (2007). Infras-
tructure for data processing in large-scale intercon-
nected sensor networks. In Mobile Data Management,
2007 International Conference on, pages 198–205.
Bray, T., Paoli, J., Sperberg-McQueen, C. M., Maler,
E., Yergeau, F., and Cowan, J. (2006). Extensible
markup language (xml) 1.1. http://www.w3.org/TR/
2006/REC-xml11-20060816/.
Crockford, D. (2006). The application/json media type for
javascript object notation (json). Internet RFC 4627.
http://www.ietf.org/rfc/rfc4627.txt.
Dawson-Haggerty, S., Jiang, X., Tolle, G., Ortiz, J., and
Culler, D. (2010). smap: a simple measurement and
actuation profile for physical information. In Proceed-
ings of the 8th ACM Conference on Embedded Net-
worked Sensor Systems, SenSys ’10, pages 197–210,
New York, NY, USA. ACM.
Dunkels, A. (2003). Full tcp/ip for 8-bit architectures. In
Proceedings of the 1st international conference on
Mobile systems, applications and services, MobiSys
’03, pages 85–98, New York, NY, USA. ACM.
Eneida, I. (2012). Industrial wireless sensor networks.
http://www.eneida.pt/produtos/.
Grosky, W., Kansal, A., Nath, S., Liu, J., and Zhao, F.
(2007). Senseweb: An infrastructure for shared sens-
ing. MultiMedia, IEEE, 14(4):8–13.
Guinard, D. (2009). Towards the web of things: Web
mashups for embedded devices. In In MEM 2009 in
Proceedings of WWW 2009. ACM.
Hui, J. and Culler, D. (2008). Extending ip to low-power,
wireless personal area networks. Internet Computing,
IEEE, 12(4):37–45.
NIST. (2009). Ieee 1451 smart transducer interface stan-
dard. The National Institute of Standards and Tech-
nology. http://www.nist.gov/el/isd/ieee/ieee1451.cfm.
OGC (2013). Sensor web enablement (swe). Open Geospa-
tial Consortium. http://www.opengeospatial.org/ogc/
markets-technologies/swe.
OReilly, T. (2012). Ogc puck protocol standard
version 1.4. https://portal.opengeospatial.org/files/
?artifact id=47604.
Priyantha, B., Kansal, A., Goraczko, M., and Zhao, F.
(2008). Tiny web services for sensor device inter-
operability. In Proceedings of the 7th international
conference on Information processing in sensor net-
works, IPSN ’08, pages 567–568, Washington, DC,
USA. IEEE Computer Society.
Richardson, L. and Ruby, S. (2007). RESTful Web Services
- Web services for the real world. O’Reilly Media.
Shelby, Z., Hartke, K., and Bormann, C. (2013). Con-
strained application protocol (coap) draft-ietf-
core-coap-18. https://datatracker.ietf.org/doc/
draft-ietf-core-coap/.
Shu, L., Cho, J., Lee, S., Hauswirth, M., and Zhang, Z.
(2007). Vip bridge: Leading ubiquitous sensor net-
works to the next generation. Journal of Internet Tech-
nology (JIT), 8(3):1–13.
Tolle, G. (2010). Embedded binary http (ebhttp). IETF
draft-tolle-core-ebhttp-00. http://tools.ietf.org/html/
draft-tolle-core-ebhttp-00.
Tran, T., Nunes, D., Gomes, A., and S Silva, J. (2012).
An adaptive model for exposing wsn as a service plat-
form. In In Proceeding of INForum 2012 conference.
SENSORNETS2014-InternationalConferenceonSensorNetworks
102
