
nSHIELD-Gateway
A Hybrid FPGA-Microprocessor based Architecture to Foster the Interconnection
of Embedded Systems
Marco Aiello, Antonio Bruscino, Antonio Di Marzo and Michele Paragliola
SESM s.c.a.r.l. Via Circumvallazione Esterna, loc. Pontericcio c/o Selex ES, 80014 Giugliano in Campania (NA), Italy
Keywords:
Design Methods, FPGA, Security, Reliability, Fault Tolerance, Reconfiguration, Embedded System, Avionics.
Abstract:
The complexity of Embedded Systems (ESs) is greatly increased due to their hyper-connectivity. Nowadays
resources and data are shared among ESs to create new systems, services and applications. The design of a
dynamically composable ES has several pitfalls such as security, safety and privacy that are not easy to handle
due to the shortage of tools and standard design methodologies. In such a context an FPGA IP core, based on
nSHIELD methodology (EU-FP6-project) and on Xilinx Zynq SoC, has been developed and tested, to mitigate
the aforementioned issues and to foster the evolution of the future dynamic composable embedded systems.
1 INTRODUCTION
ESs have been the driving force which has sparked
the birth and pervasion of computing platforms such
as microprocessors in almost every life aspect (Faggin
et al., 1996),(Gercekci and Krueger, 1985). Nowa-
days industries are leaning toward the adoption of dis-
tributed embedded systems (Dabholkar et al., 2012):
a class of ESs formed through a composition of pre-
dominantly legacy and closed subsystems. The for-
mation of system-of-systems leads to a range of faults
that manifest themselves at different granularities for
which a statically defined fault tolerance scheme no
longer applies at all: new methods comprising dy-
namic and adaptive mechanisms are needed though.
Likewise, the design of complex and heterogeneous
systems induces to more articulated security issues
that are not easy to treat due to the lack of appropriate
design methodologies and tools. So far, the aspects
of security and dependability are analyzed during the
designing stage and custom solution are carried out;
any changes on the system will require a ”system se-
curity and dependability assessment” and eventually
a system redesign. This approach is time and cost
consuming, especially for the life critical systems,
where the process of design testing and deployment
is highly articulated. Looking at the ESs application
domains, every vendor carries on its design with its
own ”in house” methodology to design Secure, Safe
and Dependable systems. Even though the final result
is compliant to safety and security standards required
by the application domain, not always it is interop-
erable with similar products from different vendors.
Legacy system and components obsolescence are yet
another problem (Hitt and Zwitch, 2002): especially
in some specific application domain (such as avion-
ics, railway systems, automotive etc.), aging of the
systems has become a problem, mainly because the
systems are being kept in service far longer than the
original plan. The replacement of a subcomponent
poses many challenges on the new substitutes due to
the constraint of being fully interoperable in terms of
security and dependability with the remaining system
parts (Gaska, 2012).
nSHIELD project is co-funded by the ARTEMIS
JOINT UNDERTAKING (Sub-programme SP6)
(nSHIELD, ), and it aims to overcome the aforemen-
tioned aspects, providing a complete framework and
tools to ease the design of secure and dependable ES;
where the security and dependability aspects are inte-
grated into the system design flow. The project leads a
pioneer investigation to address Security, Privacy and
Dependability (SPD) in the context of ESs as ”built
in” rather than as ”add-on” functionalities, proposing
with this strategy the first step toward SPD certifica-
tion program.
The nS-ESD-GW is a key component, it is in
charge of binding the generic embedded components
to the nSHIELD network. Conceptually this com-
ponent can be assimilated to a network gateway; al-
though they differ because of the network gateway
dispatches messages and generic data, instead the nS-
136
Aiello M., Bruscino A., Di Marzo A. and Paragliola M..
nSHIELD-Gateway - A Hybrid FPGA-Microprocessor based Architecture to Foster the Interconnection of Embedded Systems.
DOI: 10.5220/0004713201360141
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages
136-141
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
ESD-GW generates, dispatches and interprets mes-
sages belonging to the framework creating an inter-
face among the layers. Several mechanisms and func-
tions have been integrated in this component, such
as fault detection algorithms, encryption mechanisms,
etc. The ns-ESD-GW has been implemented using
the Zynq chip endowed by a standard ARM
R
dual-
core Cortex
TM
-A9 MPCore
TM
processing system with
Xilinx 28nm programmable logic; this processor-
centric architecture offers the flexibility and scala-
bility of an FPGA with the performance and power
consumption of ASIC. Albeit, this framework encom-
passes aspects of security privacy and dependability,
in this paper the major focus has been given to the
dependability.
The nS-ESD-GW is subject to a strict company
policy, It has been developed, within the context of
nshield research project, to support the NSHIELD’s
avionc demonstrator. Because of this, it is not possi-
ble to provide any detailed information about the de-
sign, source code or the testing environment.
This paper is structured as follows: in section 2 an
introduction to the framework is given; then the sec-
tion 3 tackles the proposed nS-ESD-GW, as a means
to bridge the embedded systems and nSHIELD net-
work components. Furthermore, the section 3 in-
cludes a description of the proposed application sce-
nario and of the bench demonstrator. The last section
4, comprises the conclusions.
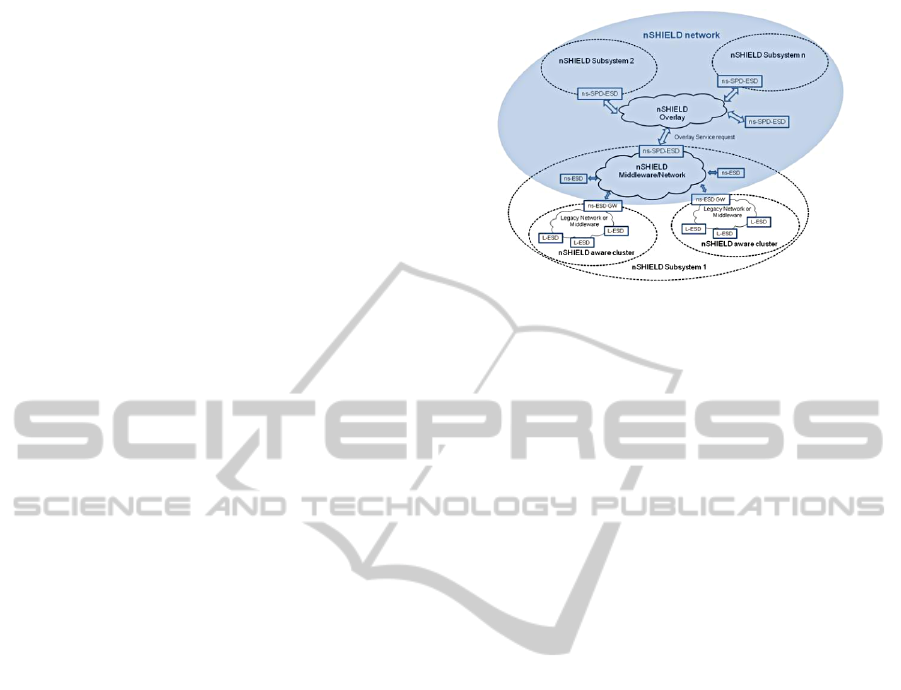
2 nSHIELD
The main focus of the nSHIELD project is to develop
a new methodology to boost and to facilitate the de-
sign process for complex embedded systems, with a
particular emphasis to Security, Privacy and Depend-
ability aspects (nSHIELD, ). In Figure 1, the logical
architecture of the framework is depicted. Referring
to the framework guideline a system shall be struc-
tured in a number of bottom-up logical layers, here-
after described:
Node Layer: they represent the hardware compo-
nents that constitute the bottom side of this lay-
ered architecture. In this layer are placed all
the Embedded Systems, which perform a specific
function, in the context of the global system. Ac-
cording to the computational capabilities of these
devices. The framework defines three types of
nodes: nano, micro and power nodes.
Gateway (nS-ESD-GW): makes a bridge to facil-
itate the exchange of the framework messages.
Further details about this type of node will be
given in next section.
Figure 1: nSHIELD Conceptual Architecture.
Network Layer: includes the communication tech-
nologies, procedures, algorithms and protocols
that allow the exchange of the data among the
components of the framework. This is a hetero-
geneous layer since it must interconnect different
kind of devices.
Middleware Layer: is a software layer that provides
functionalities as discovery, composition and exe-
cution of the basic services necessary to guarantee
SPD required.
Overlay: is a logical vertical layer that collects se-
mantic information coming from the Nodes, Net-
work and Middleware layers and uses them to
compute the adequate actions in order to drive the
composition of the SHIELD elements and to meet
the desired level of SPD. This is a software layer
as well.
An ES designed in compliance to the nSHIELD
will be natively able to sense and control the SPD at-
tribute. In particular the middleware will execute the
three following atomic actions to preserve the SPD
level required by the application (Figure 2):
• Measure: nSHIELD/components will measure
the current system SPD level by means of nodes,
network and gateways;
• Compare: nSHIELD/components will continu-
ously compare the current value of SPD with de-
sired SPD level;
• React: nSHIELD/components will take an appro-
priate countermeasure to keep an adequate level
of SPD. As countereaction SHIELD, eventually,
reassembles the whole system by means of dis-
covery, composability and SPD policies.
In order to have a formal and quantitative estima-
tion of SPD level associated to the system several ESs,
the framework employs the concept of SPD metrics.
The SPD metric is a triple (x,y,z) where each num-
ber is a dimensional number within 0 and 100 (higher
nSHIELD-Gateway-AHybridFPGA-MicroprocessorbasedArchitecturetoFostertheInterconnectionofEmbedded
Systems
137
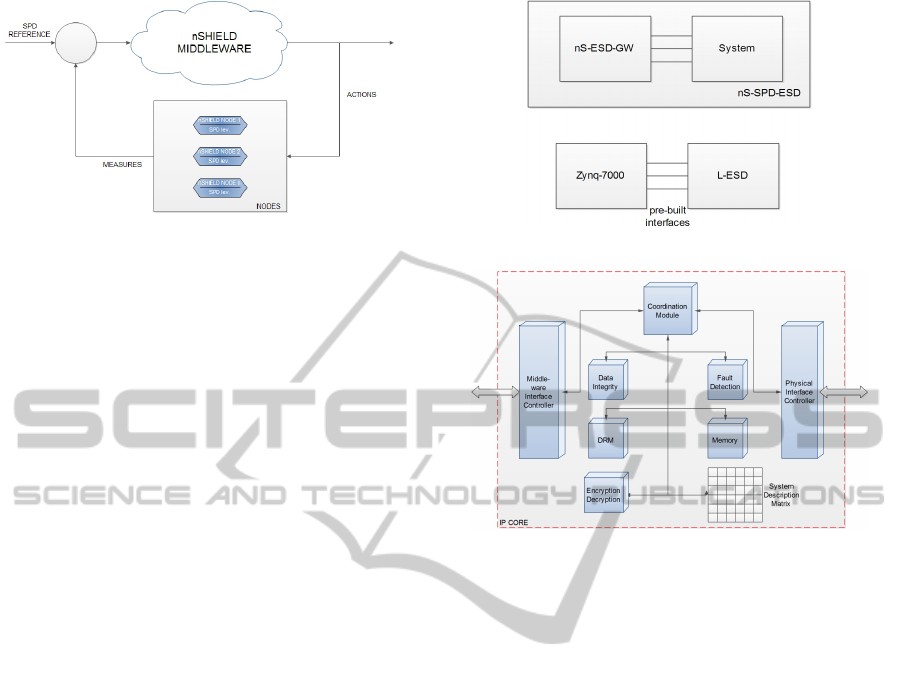
Figure 2: nSHIELD Middleware Functionalities.
number correspond to higher dependability respec-
tively security and privacy).
3 CASE STUDY: DESIGNING THE
GATEWAY
To foster the diffusion of this methodology, several
framework components, such as the nS-ESD-GW and
the middleware, have been deployed as open code
risp. open hardware. The nS-ESD-GW is a key com-
ponent of the nSHIELD methodology. This compo-
nent is in charge of binding the generic ESs to the
nSHIELD network. This component can be used in
two different cases (Figure 3):
New systems: it can be integrated during the design
process into an hosted embedded system in order
to let it become a nSHIELD compliant device;
Legacy systems: it is possible to interface the nS-
ESD-GW to a legacy embedded system that is
already deployed endowing it the properties re-
quired by the framework.
Therefore, considering systems such as avionics,
railways, automotive and many others, they encom-
pass several components that, for some reason or
other, can’t be replaced nor even easily redesigned
in order to adhere to the nSHIELD methodology.
Upon such considerations the needs of the nS-ESD-
GW is based. The nS-ESD-GW finally operates as
a smart adapter between legacy components and the
nSHIELD network.
3.1 The Gateway
Seeing the flexibility and computational power re-
quired by the nS-ESD-GW a suitable solution is based
on a SoC FPGA centric architecture. In this way the
reliability, security and real-time requirements can be
guaranteed exploiting the potentiality and the recon-
figurability given by this SoC outlined.
Figure 3: nS-ESD-GW integrations.
Figure 4: nS-ESD-GW Gateway Logical View.
The integration of the aforementioned nS-ESD-
GW into a preexisting system or into a new system
implies the development of custom hardware con-
trollers and software drivers, because of the hetero-
geneous nature of legacy nodes. However, the use
of a predefined set of module templates can boost
the integration process. As shown in the Figure 4,
the gateway architecture includes different modules
whose synergy will foster the integration of legacy
embedded systems in the SHIELD architecture. This
architecture encompasses three main modules:
• Dispatcher modules;
• Coordination module;
• Security module.
3.1.1 Dispatcher Modules
The dispatcher module encompasses two controllers
dedicated to the integration and communications of
the framework components. In the Figure 4 these
controllers are identified as middleware interface con-
troller and physical interface controller. Through the
middleware interface controller the nS-ESD-GW con-
verts a service or command request from the compo-
nent to a logical format that the legacy systems in the
lower layer can understand and vice versa. Likewise,
the physical interface controller supplies proxy ser-
vices for nodes with a non-standard physical commu-
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
138

nication. According to this, it can be seen as a low
level interface to the legacy embedded systems.
The physical interface controller includes a sub-
set of common ready-to-use interfaces as: ETH, SPI,
I2C, etc.
3.1.2 Coordination Module
The coordination module is composed by a proces-
sor running some balancing algorithms and safety al-
gorithms and by several specific processing blocks,
e.g. cryptography. Albeit, it is possible to execute the
same process on a softcore processor, the current so-
lution relies on a dual core microprocessor. The pro-
cessor will be in charge to manage the node resources
allocation and to balance services with the aim to en-
sure the system reliability with a dynamic load distri-
bution.
3.1.3 Security Module
The component identified as DRM (Dynamic Recon-
figuration Module) is in charge of managing the re-
configuration of the processing blocks and software
modules based on the system context and status. The
purpose of this functional block is to increase security
and dependability aspects of the node allowing the de-
vice to switch between different operational modes.
Furthermore this module allows to run multiple ap-
plications on the same device enhancing the depend-
ability and redundancy.
nS-ESD-GW architecture includes a Data In-
tegrity controller to process data by implementing
cyclic redundancy check. In conjunction with a En-
crypt/Decrypt controller it will be possible to ensure a
long term storage of sensitive data improving security
aspects of the node. Cryptographic algorithms impose
tremendous processing power demands that can be a
bottleneck in high speed and real time networks. To
follow the variety and the rapid changes in algorithms
and standards, a cryptographic implementation must
also support different algorithms and should be up-
gradeable in field. For all these reasons, a reconfig-
urable/upgradable FPGA based HW accelerator will
provide software-like flexibility with hardware-like
performances. The Fault Detection module will en-
compass the nSHIELD and application domain spe-
cific fault detection algorithms.
3.2 Application Scenario
To verify the validness of the framework and its com-
ponents, an avionic demonstrator has been employed.
Due to framework complexity and to its large amount
of features, this demonstrator is not enough to ver-
ify all of its features. Therefore the demonstrator is
focused on some of them and more in detail on veri-
fying the following concepts:
• Dynamic composability;
• Fault detection and recovery;
• SPD Interoperability and Integration of heteroge-
neous system.
An avionic system is a critical or even life-critical
one, for these reasons keeping it in fully operational
status is of vital importance. To mitigate effects, such
as loss of services or loss of lives, caused by failure of
system components, the system redundancy is com-
monplace in the avionic field. In this way, in the oc-
currence of a fault, spare parts can substitute damaged
ones. In such a context we employ system supervisor
based on nSHIELD methodologies, that is capable to
identify and recover a fault by means of composabil-
ity. At the heart of the chosen avionic application sce-
nario there is the Unmanned Aerial Vehicle (UAV),
a system composed by an aircraft controlled by a pi-
lot located on the ground, through a remote control
unit. Our target is to keep constant the level of safety
of the overall mission through the cooperation of het-
erogeneous tools and related technologies, in order to
protect staff and aircrafts from accidental and/or ma-
licious harm, crime and any other possible threat. In
order to achieve our goal, we can identify some criti-
cal issues:
• difficulties to coordinate heterogeneous systems
to achieve an appropriate level of security;
• difficulties to reassemble the system and to react
to a non-predictable and known events;
• difficulties to react promptly to threats based on
context changing.
The avionic scenario refers to an UAV flock
flight mission. The main actors of the scenario are:
two UAVs (scaled down to the Integrated Modular
Avionic (IMA) systems), the nS-ESD-GW gateway,
a Software Defined Radio (SDR), a GPS sensor board
and a Remote Control Unit (RCU). In the course of
an UAV flock flight mission, where the adequate level
of security is kept due to the coordination between the
RCU and the UAV, two events of failure will be tack-
led: a fault solved at UAV’s system level, and a fault
settled at system of systems level.
With the aim to demonstrate the fault detection
and the system dynamic reconfigurability, an initial
configuration of the scenario is made up of a single
UAV and its RCU. During a normal operational sta-
tus, the first fault occurs: suddenly the GPS position-
ing module experiences a failure. When this event
nSHIELD-Gateway-AHybridFPGA-MicroprocessorbasedArchitecturetoFostertheInterconnectionofEmbedded
Systems
139
is identified, it’s isolated and recovered by the IMA
with the activation of a spare unit. The second fault
occurs on the GPS positioning spare module: sud-
denly it stops working, putting at risk the mission out-
come. Due to the lack of another spare unit, such a
fault cannot be solved via traditional methods. Using
the nSHIELD technology instead, the fault is identi-
fied as a reduction of SPD level and is managed via
the adoption of the feature composability provided
by the nS-ESD-GW. The overlay receives data sup-
plied by the gateway and decides to involve the sec-
ond UAV to share its measurements (camera, GPS po-
sition, radar) and to perform the position estimation
task with which the faulty UAV keeps on carrying on
its mission. The outcome of this process is a partial
restoring of SPD level.
3.3 Bench Demonstrator
In order to put at test our ideas, a bench demonstrator
has been implemented. Albeit not being a fully func-
tional system, this choice allows the practical high-
lighting of key concepts previously introduced: dy-
namical system reconfigurability and composability,
efficient and robust SPD management, legacy systems
lifespan extension. The adaptation of a reduced bench
demonstrator, rather than a fully functional system,
is necessary to conciliate conflicting constraints such
as: shortage of development time, budget restrictions,
manpower limitations, demonstrator practical value
and usefulness, IP cores reusability. The demonstra-
tor main actors are:
• IMAs: they depict the on-board embedded legacy
systems responsible of the functioning of the
UAVs.
• nSHIELD gateway: being a bridge among the
legacy avionic system (already equipped with
built-in features of reconfigurability), it allows the
extension of dynamic system reconfigurability at
the wider system of systems level.
• Network infrastructure.
• nSHIELD Middleware: it orchestrates the over-
all system by purpose of control the SPDs levels,
given the constraints dictated by the available sys-
tem resources and current threats levels.
• GPS positioning modules: they are used to show
the nSHIELD methodology behavior in the man-
agement of a fault at the system of systems level.
• SDRs (Software Defined Radios): their purpose is
to allow the data exchange among the UAVs in a
way that allows to change dynamically the level
of SPD on the basis of the decisions taken by the
nSHIELD overlay.
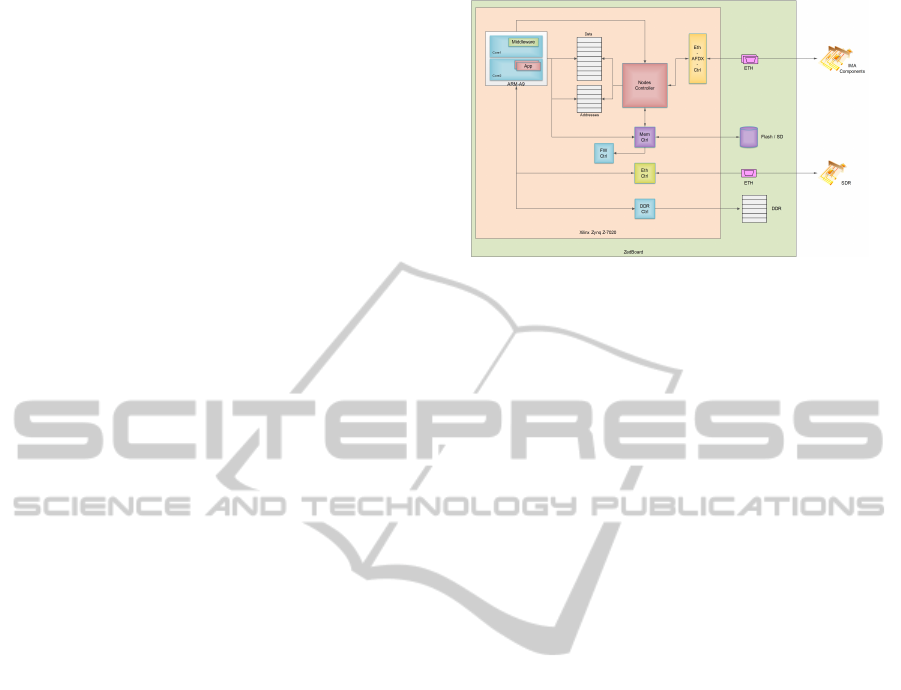
Figure 5: Gateway Architecture.
In Figure 6 a subsection of the whole test scenario
is depicted: the IMA itself is made up of an IMA
Central Unit plus a RIU board (which is responsible
of data acquisition from sensors signals and actua-
tion of commands toward on-board electromechani-
cal systems). Both IMA and RIU are redundant for
a matter of dependability as required by the avionic
standards. The IMA Central Unit interacts with the
RIU via an ETH/AFDX DATA link. The transmis-
sion protocol used by the IMA is the RTPS (Real
Time Publish Subscribe). This ensemble constitutes
the legacy avionic system. The nS-ESD-GW gateway
is linked by one side to the legacy embedded system
by a standard Ethernet data link and by the other one
with the SDR. By the IMA perspective, the gateway
acts as an RTPS node, its main purpose is to render
the overall system nSHIELD compliant with the min-
imum impact. All this equipment is replicated, being
two UAVs involved. The overlay SW runs on a COTS
PC which is equipped with an SDR to perform data
exchange with the UAVs. Going further, the gateway
has a Zynq-7000 AP SoC at its backbone: it embodies
a dual core ARM CPU plus the relative cache memo-
ries, an FPGA fabric, DSP data paths, I/O functions.
On the first ARM core runs the middleware , on the
other CPU there are bare metal applications which al-
lows the interfacing with the IP cores implemented on
FPGA fabric.
Now follows a detailed description of the afore-
mentioned faults. Starting with the single system
level fault, the GPS positioning module malfunction-
ing is excited merely unplugging the power to the
module. The GPS module is directly plugged to the
RIU and the IMA can perform settings and readings
using the IMA itself. The IMA Central Unit periodi-
cally acquires information needed to apply actions de-
fined by the avionic standards. When the fault is de-
tected, being available spare resource, the IMA sub-
stitutes the faulty part with a replacement. In this con-
text the nS-ESD-GW continuously gathers these in-
formation and computes, through the middleware, the
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
140

Figure 6: Overall Architecture.
SPD values. Looking at the second malfunctioning,
due to the fault of the spare GPS positioning mod-
ule, the IMA cannot overcome the replacement with-
out the nSHIELD methodology intervention. Look-
ing at Figure 5, the nodes controller writes informa-
tion acquired by the IMA about the system status on
the data tables hosted in the Gateway. The middle-
ware running on the ARM CPU reads these memories
and uses their content in order to guide its decisions.
The SDR will distribute to the Remote Control the in-
formation about the occurred fault Unit, consequently
the Overlay computes the action to be performed and
orders the involvement of another UAV. The middle-
ware running on this second UAV reads its data tables
in order to query for the presence of the requested re-
sources. Now the middleware involves the nodes con-
troller to gather the requested GPS positioning data.
Once collected these information are written in the
data table. At this stage the middleware of the sec-
ond UAV involves the SDR resource in order to start
a data reply with the estimated GPS data positioning
information of the first UAV. In this way the middle-
ware on the first UAV detects a pending transmission
on its SDR, recognizes the requested GPS data, writes
it on its data table. Now the nodes controller is used
to start a publish transaction via the RTPS protocol.
Hereon the IMA detects the message and can sustain
the lack of the faulty GPS module.
4 CONCLUSIONS AND FUTURE
WORK
In this paper we have shown as the nSHIELD method-
ology is a viable solution to tackle the management
the dependability requirements in heterogeneous and
distributed ES. Albeit, the silicon market is over-
crowded by a multitude of chips adequate to the pur-
pose, the Zynq SoC has represented a perfect match
with our needs thanks to its tight integration of typi-
cal embedded systems components such as multicore
ARM CPUs, a powerful FPGA fabric, a wealth of IP
peripherals and a tight integration among its subcom-
ponents, accompanied by a huge capacity data chan-
nel. Its huge versatility has greatly eased the practi-
cal application of the nSHIELD methodology in the
context of the gateway implementation. Albeit, this
methodology offers a first step toward the implemen-
tation of a design standard in the ES landscape, it has
yet to experience a wide diffusion. In the years to
come such a void could be filled via the adoption of
this methodology and its evolutions as a standard in
the design stage of heterogeneous and distributed em-
bedded systems.
REFERENCES
Dabholkar, A., Dubey, A., Gokhale, A., Karsai, G., and Ma-
hadevan, N. (2012). Reliable distributed real-time and
embedded systems through safe middleware adapta-
tion. In Reliable Distributed Systems (SRDS), 2012
IEEE 31st Symposium on, pages 362–371.
Faggin, F., Hoff, M., Mazor, S., and Shima, M. (1996). The
history of the 4004. Micro, IEEE, 16(6):10–20.
Gaska, T. (2012). Optimizing an incremental modular
open system approach (mosa) in avionics systems for
balanced architecture decisions. In Digital Avionics
Systems Conference (DASC), 2012 IEEE/AIAA 31st,
pages 7D1–1–7D1–19.
Gercekci, A. and Krueger, A. (1985). Trends in micropro-
cessors. In Solid-State Circuits Conference, 1985. ES-
SCIRC ’85. 11th European, pages 233–233i.
Hitt, E. and Zwitch, B. (2002). Aging avionics: the prob-
lems and the challenges. Aerospace and Electronic
Systems Magazine, IEEE, 17(9):16–21.
nSHIELD. http://www.newshield.eu/.
nSHIELD-Gateway-AHybridFPGA-MicroprocessorbasedArchitecturetoFostertheInterconnectionofEmbedded
Systems
141
