
A Novel Ray-shooting Method to Render Night Urban Scenes
A Method based on Polar Diagrams
M. D. Robles-Ortega, J. R. Jim´enez and L. Ortega
Department of Computer Science. University of Ja´en, Paraje Las Lagunillas s/n, Ja´en, Spain
Keywords:
Polar Diagrams, Large 2.5D Urban Models, Hard Shadows, Ray-shooting.
Abstract:
Illumination and shadows are essential to obtain realistic virtual environments. Nevertheless, large scenes like
urban cities demand a huge amount of geometry that must somehow be structured or reduced in order to be
manageable. In this paper we propose a novel real-time method to determine the shadowed and illuminated
areas in large scenes, specially suitable for urban environments. Our approach uses the polar diagram as
a tessellation plane, and a ray-casting process to obtain the visible areas. This solution derives the exact
illuminated area with a high performance. Moreover, our approach is also used to determine the visible
portion of the scene from a pedestrian viewpoint. As a result, we only have to render the visible part of the
scene, which is considerably lower than the global scene.
1 INTRODUCTION
Shadow rendering is essential to achieve realistic im-
ages of virtual environments. In fact, it has been a
prolific research line since the beginnings of the com-
puter graphics field. Nevertheless, illumination of ur-
ban scenes with many light sources is still an open
problem if the real-time rendering is pursued as a
goal. The complexity and the large size of common
cities is usually a challenge to obtain realistic results
in interactive environments.
Nowadays the process of modeling real urban
scenes is normally performed from imagery and LI-
DAR scans as described in (Musialski et al., 2013).
Although there are also techniques that work from
cadastral data (Robles-Ortega et al., 2013), as it is
done in this paper. In any case the realism is ob-
tained by means of real geometry and real facades
photographs, which evidently increases the storage
requirements, especially when the goal is to model en-
tire cities. In order to simplify an urban scene, build-
ing models are usually represented as 2.5D objects in
the related work (Argudo et al., 2012).
In this paper we propose a novel ray-shooting ap-
proach based on polar diagrams (Grima et al., 2006)
to obtain precise direct illumination in city models.
The scenes use photorealistic models located in a
night urban scene and directly illuminated by a set of
street lamps. Our geometric-based approach requires
a very few number of rays to determine the set of il-
luminated areas in comparison to the classical image-
based ray-casting. In a night urban scene, lampposts
are mainly the light that illuminates certain portions
of the buildings, the rest remains in shadow. These
lighted areas can come from several sources, each of
them adding intensity to each illuminated pixel de-
pending on the distance to the light source. Our exact
method works in two phases: (1) obtaining the exact
visible set from the viewpoint or camera position and
(2) computing shadows in this portion of the visible
environment. The first phase is a ray-casting process
to obtain the visible portion of scene from the view-
point. In the second, the illuminated and shadowed
areas are computed following a similar process using
polar diagrams as well. In both phases, the polar di-
agram allows us to exploit the spatio-temporal coher-
ence, which makes the process more efficient.
In a previous work (Robles-Ortega et al., 2009),
visibility is solved in terms of buildings to accelerate
walkthrough problems. In this paper we extend the
method to resolve a precise direct illumination in city
models. Visibility is now solved in terms of primi-
tives by determining the specific intersection points.
The processing times are comparable to those ob-
tained by classical shadow maps and shadow volume
approaches. Moreover, the storage requirements are
improved because only the essential number of pho-
tographs is required for a given viewpoint, since our
method obtains the exact geometry.
The paper is structured as follows. In Section 2 we
53
Robles-Ortega M., Jiménez J. and Ortega L..
A Novel Ray-shooting Method to Render Night Urban Scenes - A Method based on Polar Diagrams.
DOI: 10.5220/0004718800530063
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 53-63
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

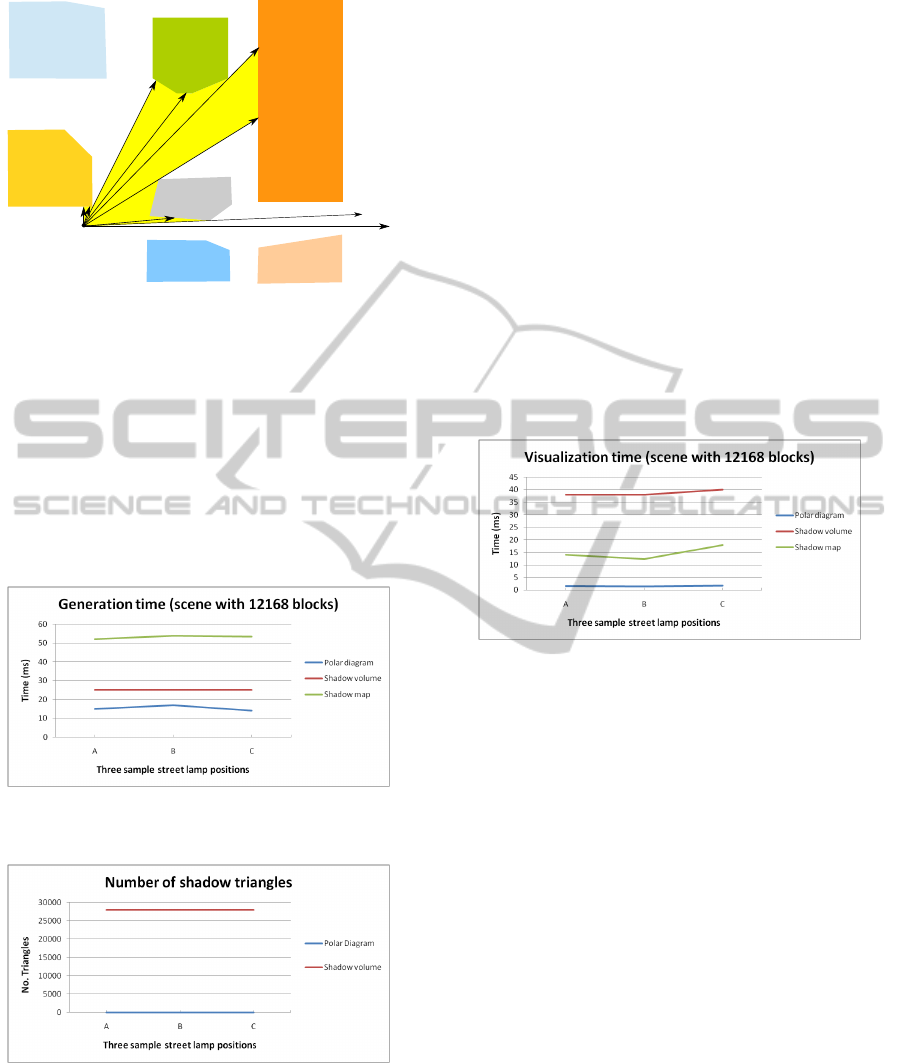
Figure 1: Sample view from a city in which it is only necessary to render a 0.1% of the total geometry.
detail the related previous work. Next, in Section 3 we
define the polar diagram and its angular characteris-
tics for visibility and shadow determination. Follow-
ing, in Section 4 we detail our approach to be applied
in 2.5D urban scenes. Finally, Section 5 presents our
results and, Section 6 the main conclusions and the
future work.
2 PREVIOUS WORK
Virtual cities have a huge amount of applications such
as traffic simulation, visual impact analysis of ar-
chitectural projects or computer games (Wonka and
Schmalstieg, 1999). In recent years there is a grow-
ing interest in working with virtual cities. Despite
real-time visualization of these environments is a very
challenging problem (Cignoni et al., 2007), there is no
specific bibliography for realistic rendering of large
cities considering the shadows that buildings cast
(Dorsey and Rushmeier, 2008).
In the literature we can find a number of al-
gorithms for massively rendering cities such as the
blockmaps (Di Benedetto et al., 2009) or the texture-
atlas tree (Buchholz and Dollner, 2005). These ap-
proaches usually adapt traditional acceleration strate-
gies (such as level of detail, image-based render-
ing and visibility culling techniques) to the particular
properties of city models: 2.5D overall shape, plane-
dominant geometry, regular structure, dense occlu-
sion, large texture datasets (Argudo et al., 2012) or
geometry simplification (Germs and Jansen, 2001).
As stated in (Revanth and Narayanan, 2012),
culling approaches avoid rendering the geometry that
is ultimately not visible, which is especially use-
ful in web-client systems. Occlusion culling tech-
niques perform particularly well in urban environ-
ments (Wonka et al., 2001), in which buildings are
normally big occluders (Koldas et al., 2007). Our pro-
posed method firstly makes a drastic geometry reduc-
tion using a novel occlusion culling method. Thanks
to this approach, the data that should be processed
are reduced and the GPU is released of rendering big
scenes. The method is based on the polar diagram
(Grima et al., 2006), which performs a plane subdi-
vision on the city map. A similar approach used for
web-based city walks in (Zara, 2006) also generates
a sector division of a virtual city. However, the main
drawback of this proposal is that the division must be
added to the system manually.
Besides visibility culling techniques, another
common strategy to reduce the size of the urban scene
is modeling the buildings as 2.5D models (Bittner
et al., 2005; Cohen-Or et al., 1998). Thus, the prism-
shaped elements can be efficiently processed thanks
to this simplification process without losing realism
in the final scene.
To the best of our knowledge, classical real-time
shadow approaches such as shadow maps or shadow
volumes (Eisemann et al., 2011), are not focused
on very large urban environments, and can be over-
whelmed by the large amount of geometry to be pro-
cessed. As a consequence, this kind of solutions can
be useful in a second step to deal with the reduced
scene (the visible portion from the pedestrian point
of view). There are some strategies to minimize the
impact of the excess of the geometry, like BSP, oc-
tree, etc. For instance, (Chin and Feiner, 1989) pre-
sented the first BSP solution related with the compu-
tation of shadows. They proposed the shadow volume
BSP tree where each node is related with a shadow
along a given plane. Each light source requires its
corresponding SVBSP tree. For each tree, the number
of nodes are minimized by grouping shadow areas of
different polygons.
3 THE POLAR DIAGRAM
Visibility resolution is invaluable for the efficient de-
velopment of shadow algorithms under the assump-
tion that only the visible portion of scene must be
rendered. The polar diagram solves visibility for 2D
and 2.5D scenes as described in (Ortega and Robles-
Ortega, 2013) for the general case, and in (Robles-
Ortega et al., 2009) for urban scenes.
In this paper we demonstrate that the polar dia-
gram can also be used to compute shadows using the
same preprocessing. In summary, in a first phase of
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
54

the process the polar diagram determines the section
of visible scene from the viewpoint. Afterwards, the
same tessellation determines which portions of this
visible scene are illuminated or in shadow. In this
second phase each light source is in fact used as view-
point to solve the same visibility problem. Visible ar-
eas coincide with the lighted scene when the view-
point is replaced by light sources. Boundaries delim-
iting the illuminated areas and those that remain in
darkness are also determined with complete accuracy
and efficiency. The first phase for visibility determi-
nation is fully detailed in (Ortega and Robles-Ortega,
2013). This method works with the simple 2D ge-
ometry of the building footprints, but considering the
height of the buildings. It follows a ray-shooting pro-
cess managing tangent lines to this two-dimensional
objects. Tangent lines or bitangent lines are also re-
ferred in the literature to get the visibility complex
of n convex objects in the plane (Pocchiola and Veg-
ter, 1993). The visibility complex has also been used
for radiosity computation in 2D environments (Du-
rand et al., 1996). In this paper we focus on shadows
calculation once the polar diagram has found the ex-
act portion of visible scene.
The polar diagram associated to the scene E,
P (E), can be defined in similar terms to the Voronoi
diagram (Okabe et al., 1992). This tessellation finds
the nearest site to a given point position in logarith-
mic time by locating this point in a Voronoi region.
The polar diagram follows the same principle: (1) any
point position p is located in the polar region of object
o
i
, p ∈ P
E
(o
i
) in logarithmic time , (2) and a winged-
edge data structure speeds up ray-shooting algorithms
thanks to the topological relations.
While the Voronoi diagram obtains the nearest site
to a given point (Euclidean distance criterion), the po-
lar diagram finds the nearest angular site (or polygo-
nal object). That is, it uses the minimum angle as
criterion of construction, which benefits the search of
angularly close objects. The use of polar diagrams
has several advantages such as being precomputed in
optimal time, Θ(nlogn), and also that conservativity
is ensured, which means that no visible objects are
missed.
The major drawback is that no specific methods
have been developed for 3D scenes. However, the ex-
tension to 2.5D scenes is straightforward. Although
visibility determination is considered a complex prob-
lem in 3D scenes, urban environments have certain
characteristics that make visibility to be addressable
using polar diagrams. Buildings can be considered
large occluders that are usually represented by prism-
shaped objects, the so-called 2.5D models (Cohen-Or
et al., 2003).
(a) Top view scene (b) P
0+
(E)
Figure 2: Visibility and illumination relationship.
Figure 2.a) represents the top view of a prism-
shaped scene. The leftmost picture shows the por-
tion of scene directly illuminated by a light source
or directly visible by an observer. These problems
can be directly solved in linear time by performing a
clockwise and counterclockwise scanning from p as
depicted in Figure 2.b). However, this calculation is
expensive in time if the scene is very large or the ob-
server moves. In this picture p is located in the polar
region of object B. By definition of polar diagram, if
p ∈ P
E
(B), object B is the first visible object from p
when performingan angular scanning from angle zero
in counterclockwise direction, and therefore, B is vis-
ible from p. If this polar diagram works efficiently in
the angular range [0,π/2], the total angular spectrum
[0,2π] can be covered using four polar diagrams, each
of them working in a similar way for each of the four
quadrants of the coordinate plane as described in (Or-
tega and Robles-Ortega, 2013).
Although angular proximity does not involve vis-
ibility, it identifies which are the candidates that must
be checked. The resulting illuminated scene is iden-
tified by means of a ray-casting process from point
p using the plane partition obtained by the polar dia-
gram.
3.1 The Ray-casting Process
Visibility or illumination can be solved by means
of a ray-casting process from the viewpoint or light
source. Any ray shot r(t) from p in the angular range
[0,π/2], representing a light beam, can use the P (E)
polar diagram to determine efficiently its trajectory
using the topological data structure associated to po-
lar diagrams. If r(t) intersects with object o
i
, then
o
i
is visible from p. If a single ray can determine a
visible object in a specific direction, then a fan of se-
lected rays may determine the visible portion of the
scene from p in an angular range. The view frustum
is defined by the angular sector [r
L
,r
R
], being r
L
the
ray defining the left side and r
R
the right one. If the
view frustum does not match with a quadrant, which
is the usual, two or more polar diagrams will be used
ANovelRay-shootingMethodtoRenderNightUrbanScenes-AMethodbasedonPolarDiagrams
55

as described next (Ortega and Robles-Ortega, 2013):
1. Divide [~r
L
, ~r
R
] into the sub-intervals correspond-
ing to each quadrant involved.
2. For each sub-interval [~r
l
, ~r
r
] ⊆ [~r
L
, ~r
R
]
(a) Determine the polar diagram P (E) for this sub-
interval.
(b) Locate p in the polar region of object o
i
, p ∈
P
E
(o
i
).
(c) Determine the set of rays R
lr
=
{r
l
, r
1
, r
2
, ...,r
r
} being for simplicity
r
j
= r
j
(t), j ∈ [l,1,2,...,r] a ray starting
from the light source position p.
(d) For each ray r
j
compute a collision detection.
Of all the above steps, which deserve explanation
are the collision detection process and the selection of
rays. The collision detection (Step 2.(d)) is discussed
in (Ortega and Feito, 2005). This process provides,
the object o
v
intersecting with r(t) (if any). Then, o
v
is visible from p and depending on the distance, o
v
is
directly illuminated. The algorithm describes the tra-
jectory of r(t) through adjacent polar regions until an
intersection is computed or the ray leaves the scene.
The ray shooting process requires O(N) time for
guiding the ray r(t) across the N regions of the scene.
However, the worst case is very rare in dense scenes in
which the ray is likely to collide with nearby objects.
Algorithm 1: Fan of tangent rays R
lr
.
Input:
• The scene E = {o
1
,o
2
,...,o
n
}
• The light source position p
Output: The fan of tangent rays R
lr
= {r
l
, r
1
, r
2
, ...,r
r
}
BEGIN
1. Let V the set of visible objects from p, V =
/
0
2. Let T =
/
0 a data structure of rays angularly sorted from
left to right
3. Insert r
l
and r
r
into T
4. While T is not empty
(a) Get and remove the first element r
i
from T
(b) Insert r
i
into R
lr
(c) Shoot r
i
and detect the collision with object objInt
(d) Determine [r
j
,r
j+1
] the consecutive rays in R
lr
such
that r
i
∈ [r
j
,r
j+1
]
(e) If objInt 6= Null AND objInt /∈ V AND [r
j
,r
j+1
] is
not a closed range
i. Insert objInt into V
ii. Insert in T the left and right tangent to object o
i
5. return R
lr
angularly sorted
END
Next we define the tangent ray and fan of tangent
rays concepts:
Definition 1. The tangent ray: r
i
= {p, ptTg,
objTg, ptInt, ob jInt} represents the set of attributes
associated to the ray r
i
, being p the origin of the ray
(viewpoint), objInt ∈ E is the object collided by r
i
in
the point ptInt, ob jTg ∈ E is the object such that r
i
is
tangent to ob jTg and ptTg is the tangent point of r
i
in
objTg. We denote R
lr
= {r
l
, r
1
, r
2
, ..., r
r
} as the the
fan of tangent rays with origin in p, angularly sorted
and using a single polar diagram P (E).
All these tangent rays r
i
form the corresponding
fan of tangent rays R
lr
which finds exact visibility.
The advantages of tangent lines are that the set R
lr
is
as reduced as possible (only O(2k) rays for k visible
objects). In addition light sources also follow tangent
lines direction, which makes our method especially
suitable for illumination purposes.
The ray-casting process described in Algorithm 1
generates a fan of rays angularly sorted from p. Each
ray launched may detect a new visible object o
v
which
is inserted in the set V of visible objects. Then the left
and right tangent lines to o
v
are inserted in the set T
of rays to be processed in the same way. The result is
a fan of tangent rays described above defining the ex-
act illuminated areas of the scene (see Definition 1).
Each tangent ray is determined by the origin and end
point of r
i
, the visible object objInt and its intersect-
ing point ptInt, as well as the information about the
tangent object ob jTg, if any, and the tangent point
ptTg.
The algorithm follows inserting the two rays
defining the view-frustum r
l
and r
r
in T (Step 3). r
l
is the first ray angularly sorted and the first one that
is shot. Whenever a launched ray r
i
intersects with
an object objInt, its left and right tangent rays are in-
serted in T to be processed later, but only if this new
ray satisfies the following conditions:
• it is in the range [~r
l
, ~r
r
]
• it does not collide with any object already inserted
in V (if is not already visible)
• it is not within a closed range in R
lr
.
Two neighbors rays r
j
and r
j+1
, r
j
,r
j+1
∈ R
lr
pro-
vide a closed range if the angular sector [r
j
,r
j+1
] only
contains one object. Otherwise, the new tangent ray is
inserted in T waiting to be processed in order to find
new visible objects. When a tangent ray lies into a
closed range or it intersects with a visible object, no
additional rays are necessary to find new objects. Oth-
erwise, r
j
and r
j+1
may contain more than one object
and the algorithm must shot new tangents rays and
identify which objects may be placed within [r
j
,r
j+1
]
(Step 4(d)).
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
56

0
1
2
3
4
5
6
r
1
r
l
r
2
r
4
r
5
r
6
r
7
r
r
r
3
P
I
P P
P
S
P
P
P
P
S
S
Figure 3: Fan of rays from point p.
The example of Figure 3 depicts the resulting fan
of rays determining visible objects from point p after
applying Algorithm 1. Initially, T = {r
l
,r
r
} (Step 3),
the first ray shot is r
l
which collides with object o
1
(Step 3(c)). The right tangent to o
1
, the ray r
2
is shot
(the left one is out of range and is not considered)
reaching o
2
. At this point V = {o
1
,o
2
} contains two
visible objects. The new rays shot are r
1
and r
4
, the
left and right tangent rays to o
2
respectively. Among
r
l
, r
1
and r
2
the visible range is closed now because
only one object is within each pair of these rays. The
process follows when T becomes empty andV finally
contains the visible set of objects.
The topological data structure of polar diagrams
guides efficiently each tangent ray across the scene,
and also ensures to get exactly the illuminated area.
The rest of the scene remains in shadow.
Algorithm 1 shoots O(k) rays to determine k vis-
ible objects, which is optimal. As each ray can cross
O(N) polar regions to achieve a visible object, in the
worst case the fan of rays needs O(kn) time for finding
the visibility set. However, the illumination process is
more efficient than visibility since objects cannot be
illuminated beyond a specific distance. Then, illumi-
nation can be solved in O(k), being k the number of
illuminated objects.
4 DETERMINING THE
SHADOWED AND
ILLUMINATED AREAS
The fan of tangent rays determines the visible objects
from the light source position, and also the frontier
between their shadowed and lit areas, as described be-
low.
(a) Illumination from a
light source.
A
B
Secondary
(b) Umbra points gener-
ated by two tangent rays
Figure 4: Classification of hit points.
4.1 Algorithm Details
Once the fan of tangent rays has been computed, the
following step is the classification of the hit points
(Definition 2) as primary or secondary points. A hit
point is considered as primary if a tangent ray directly
intersects with any other object before touching the
tangent object (as points v1 and v2 in Figure 4(a)).
On the contrary, if the ray hits first the tangent object
before intersecting with any other in the scene, then
this hit point is classified as secondary. These points
are the frontier between shadowedand illuminated ar-
eas as depicted in the example of Figure 4(b). In this
case, rays r1 and r2 touch object A before intersecting
with B. Therefore, A casts a shadow on B, and points
v1 and v2 should be considered as secondary points.
The attributes of a hit point are formally described in
Definition 2.
Definition 2. The hit point: vp =
{p,obj,illuminated} represents the 2D intersecting
point p between a tangent ray and the polygon obj;
illuminated is an attribute which classifies the point
as primary when true or secondary otherwise.
The process to determine the set of hit points from
the fan of tangent rays is described in Algorithm 2.
Each tangent ray is likely to intersect with any build-
ing in a hit point. These points are highly relevant in
our method because they define the border between
light and shadowy areas. Then, the method evaluates
these hit points as primary or secondary. Specifically,
there are four possible cases for each ray which are
next described.
The first case (step 2a in Algorithm 2) considers
the non-tangent rays r
l
and r
r
, defining the angular
range (see Algorithm 1). These rays are the only ones
that are non-tangent to any object. They may not in-
tersect with any polygon, and then the algorithm fol-
lows with other rays. Otherwise, if the intersection is
computed, the hit point is considered as primary,since
there is no other object involved. This is the step 2b
in the algorithm, illustrated in Figure 5.
The next case is a non-intersecting tangent ray as
ANovelRay-shootingMethodtoRenderNightUrbanScenes-AMethodbasedonPolarDiagrams
57

Algorithm 2: Obtain and classify the hit points.
Input:
• The fan of tangent rays R
lr
= {r
l
, r
1
, r
2
, ...,r
r
}
• The light source position p
Output: The set of hit points S
vp
= {vp
1
, vp
2
, ...,vp
vpn
}
BEGIN
1. S
vp
= 0
2. For each ray r
i
in R
lr
(a) If r
i
.ptTg is null AND r
i
.ptInt is null Then continue
(b) If r
i
.ptTg=Null AND r
i
.ptInt 6= Null Then (Fig. 5)
i. S
vp
+ = HitPoint(r
i
.ptInt,r
i
.objInt,true);
(c) If r
i
.ptTg6=Null AND r
i
.ptInt=Null Then (Fig. 6)
i. S
vp
+ = HitPoint(r
i
.ptTg,r
i
.objTg,true)
(d) If r
i
.ptTg6=Null AND r
i
.ptInt6=Null Then
i. If (distance(lp,r
i
.ptTg) < distance(lp,r
i
.ptInt))
Then (Fig. 7(a))
A. S
vp
+ = HitPoint(r
i
.ptTg,r
i
.objTg,true);
B. S
vp
+ = HitPoint(r
i
.ptInt,r
i
.objInt,false);
ii. else (Fig. 7(b))
A. S
vp
+ = HitPoint(r
i
.ptInt,r
i
.objInt,true);
END
depicted in Figure 6 (step 2c). The hit point r
i
.ptTg is
considered as primary because there are not obstacles
between object A and the light source.
There are two possible situations when a tangent
ray intersects with any object (step 2d): the tangent
object is in front or behind of the hit object. The first
case is classified as primary like Figure 7(a) shows.
In this example, object A is closer than B to the light
source position. Therefore, as A casts a shadow in
object B, ptInt is secondary and ptTg is primary. The
other situation (Figure 7(b)) is the opposite because
objTg, object B in this case, is behind the object A,
which determines that ptInt is primary. In this case,
ptTg should not be considered for classification since
it is not directly illuminated from the light source.
An example of the hit points obtained using the
Algorithm 2 in a full scene is shown in Figure 3. As
depicted in the picture, each ray determines one or
two of these intersecting points. For example, ray r
2
obtains two hit points (the first in object 1 and the
second in object 2). Nevertheless, ray r
6
only in-
cludes one because the tangent point in object 5 is not
reached from the light source.
4.2 Generating the Illuminated Faces of
the Polygons
After classifying the hit points, the next step is deter-
mining if the polygon areas between two consecutive
hit points are illuminated or shadowed (Definition 3).
(a) r
l
.ptInt is primary. (b) r
r
.ptInt is primary.
Figure 5: Examples for case 2b in Algorithm 2.
A
B
(a) Point r
i
.ptTg is primary.
Figure 6: Example for case 2c in Algorithm 2.
Definition 3. The polar area: va = {v,illuminated}
represents an interval which delimits the illuminated
area of a polygon, being v = {v
1
,v
2
,...,v
nv
} the set of
polygon vertices delimiting the area and illuminated
an attribute that classifies the area as illuminated or
umbra. If illuminated is true, then the area has to be
represented as lit, otherwise, it is shadowed.
The area between two adjacent rays of the fan
of tangent rays are defined as the polar area. Each
of these angular sectors is illuminated or shaded,
whereby each of these areas will be rendered in ac-
cordance with its classification: illuminated or umbra.
The polar areas are built using the polygon vertices
and the hit points, according to the process summa-
rized in Algorithm 3. This procedure can be divided
into two main parts: 1) obtaining the points which
compose the area and 2) determining if they are illu-
minated or not.
Each area considered as illuminated or umbra is
delimited by two consecutive hit points (v
i
and v
i+1
).
ght
source
A
B
r
i
p
ptTg
(Primary)
ptInt
(Secondary)
(a) r
i
.ptTg is primary
and r
i
.ptInt is secondary.
ght
source
p
B
A
ptInt
(Primary)
ptTg
(not visible)
(b) r
i
.ptInt is primary and r
i
.ptTg
is not needed as it is behind the
building.
Figure 7: Examples for case 2d in Algorithm 2.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
58

ght
source
A
Primary
Primary
v
2
v
1
(a) Considering tangent
and non-tangent rays.
(b) Only considering tan-
gent rays.
Figure 8: Examples for case 6 in Algorithm 3.
All polygon vertices between v
i
and v
i+1
are also con-
sidered for generating the illuminated or umbra geom-
etry in the scene. (Steps 3-5 in the algorithm).
Algorithm 3: Classify the polar areas of a polygon.
Input:
• The set of hit points S
vp
= {vp
1
, vp
2
, ..., vp
vpn
} associ-
ated to an object o
• The vertices defining the perimeter of objects O =
{o
1
, o
2
, ...,o
on
}
Output: The set of polar areas of the polygon, S
va
=
{vp
1
, vp
2
, ...,vp
van
}
BEGIN
For i=1 To vpn-1
1. Let be va a polar area
2. va.v ←
/
0
3. va.v+=vp
i
insert the first hit point
4. va.v+=O insert the rest of polygon vertices between vp
i
and vp
i+1
5. va.v+=vp
i+1
insert the last hit point
6. If (vp
i
.illuminated AND vp
i+1
.illuminated) Then
va.illuminated =True (Fig. 8)
7. If ( (NOT vp
i
.illuminated AND vp
i+1
.illuminated) OR
(vp
i
.illuminated AND NOT vp
i+1
.illuminated) ) Then
(a) va.illuminated =true (Fig. 9)
8. If (NOT vp
i
.illuminated AND NOT vp
i+1
.illuminated)
Then
(a) If (vp
i
.obj == vp
i+1
.obj) Then
i. va.illuminated =false (Fig. 10(a))
(b) else
i. va.illuminated =true (Fig. 10(b))
END
Once all the vertices of the polar area have been
inserted, next we determine if this area is shadowed
by analyzing the three possible cases of the vertices v
i
and v
i+1
:
1. If both points v
i
and v
i+1
are primary (Step 6),
then the polar area is considered as illuminated.
In Figure 8 the hit points determine a lit part of
object A.
Figure 9: Examples for case 7 in Algorithm 3.
A
B
Secondary
(a) Hit points are sec-
ondary, and the area be-
tween v
1
and v
2
is shad-
owed.
A
B
Secondary
Light
source
Secondary
v1
v2
C
(b) Hit points are sec-
ondary, but the marked area
is illuminated
Figure 10: Examples for case 8 in Algorithm 3.
2. If one of the hit point is primary and the other sec-
ondary (Step 7, Figure 9), then the area is illu-
minated since there are no obstacles between the
light source and the object.
3. If both hit points v
i
and v
i+1
are secondary (Step 8,
Figure 10) then two different cases are found de-
pending on the object associated to the hit points:
(a) If both hit points are generated from the same
polygon, then the area is umbra. Figure 10(a)
shows an example, v1 and v2 are tangent points
of object A, which partially occludes the light
toward polygon B.
(b) If the hit points are tangent to different objects,
as in Figure 10(b), then these points determine
an illuminated area, since there are no obstacles
between the light source and the object.
Figure 11 shows the polar areas of the scene of
Figure 3. According to Algorithm 3, two consecutive
primary points determine an illuminated area, as in
the case of object 1. An example of two consecutive
secondary points can be seen for object 5, however
the area between them is illuminated because these
two points have been generated from different objects
(step 8b in the algorithm).
Finally, the polar areas are used to create the 3D
model of both floor and building faces. In the first
case, the illuminated parts of the floor are generated
using the triangles shown in Figure 11. These trian-
gles are built using the origin and endpoint of each
polar area and the light source position. On the other
hand, building faces are created by an extrusion pro-
ANovelRay-shootingMethodtoRenderNightUrbanScenes-AMethodbasedonPolarDiagrams
59
0
1
2
3
4
5
6
P
P
P
P
S
P
P
P
P
S
S
Figure 11: Determining and classifying the polar areas.
cess which uses the vertices of the polar areas.
5 RESULTS AND DISCUSSION
This section presents the tests carried out using an
Intel
R
Core
TM
2 Quad CPU Q2800 2.33GHz to eval-
uate the performance and accuracy of our method.
Next we describe them in detail.
Figure 12: Generation time of three sample street lamp po-
sitions.
Figure 13: Number of triangles of three sample street lamp
positions.
The former test compares our approach with an-
other classical shadow techniques like shadow maps
and shadow volumes with regard to performance.
Specifically, two different urban scenes composed
of 1183 and 12168 blocks of buildings (7.000 and
70.000 triangles respectively) have been used. For
each scene, three representative street lamp positions
(A, B and C) have been selected in different areas of
the city in order to study the number of shadow trian-
gles, and the generation and visualization time.
Table 1 summarizes the results for the polar di-
agram (top), shadow volume (medium), and shadow
map (bottom). In the case of the polar diagram, the
shadow computation time is divided into the time re-
quired to find the lit set of blocks and the ground
surface. Despite this process is straightforward for
shadow maps and shadow volumes, our method is
faster (see Figure 12). The construction time and
the visibility determination for polar diagrams can be
considered as a pre-processing phase because build-
ings do not change and street lamps do not move dur-
ing the navigation process. Therefore, these times
should not be considered in the performance study.
Figure 14: Visualization time of three sample street lamp
positions.
Another important feature associated to our ray-
casting method is its accuracy in 2.5D scenes, since it
finds the exact set of directly illuminated primitives.
As a result, the shadow geometry to be rendered in the
scene is considerably reduced in comparison with the
shadow volume technique which requires the genera-
tion of a significant amount of extra geometry (Eise-
mann et al., 2011). In our example, thousands of
triangles are needed to represent the shadow volume
while the polar diagram only uses dozens of polygons
(see Figure 13).
Besides generation time and geometry, another
important feature in performance is the visualization
time. As shown in Table 1 and Figure 14, the ren-
dering time is also more reduced for our method (on
average of about 20 times). This is a direct conse-
quence of the shadow geometry reduction since the
final scene to be rendered is smaller than for the clas-
sical approaches.
In view of the results of this test, we can conclude
that our method obtains a good performance in 2.5D
scenes with regard to generation, rendering times, and
geometry load. This issue is specially useful for web-
based systems and low-capacity devices.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
60

Table 1: Performance of polar diagrams, Shadow Map and Shadow Volume. Scene A(7000 triangles), Scene B(70000 trian-
gles).
Scene A (1183 blocks) Scene B (12168 blocks)
Street lamp positions (A,B,C)
A B C
A B C
Polar Diagram
Construction time (ms) 437 1940
No. visible buildings
1 2 2 4 2 3
Time to determine visibility (ms)
30 30 10 42 29 30
Ground shadows (No. triangles)
3 4 7 5 4 11
Ground shadows (cpu time ms)
2 1 2 13 14 13
Block shadows (No. triangles)
9 18 18 8 6 6
Block shadows (cpu time ms)
1 1 1 2 3 1
Visualization (time ms)
1 1 1 1.5 1.33 1.67
Shadow Volume
No. vertices
9464 9464 9464 56000 56000 56000
No. Quads
2366 2366 2366 14000 14000 14000
Shadow generation (No. triangles)
4732 4732 4732 28000 28000 28000
Shadow generation (cpu time ms)
10 10 9.5 25 25 25
Visualization (time ms)
6 8 7 38 38 40
Shadow Map
Shadow generation (cpu time ms)
14 14 13 52 54 53.5
Visualization (time ms)
6 8 7 14 12.3 18
The main purpose of the latter test is studying the
behaviour of our method during a free walkthrough
navigation (see four sample screenshots of this pro-
cess in Figure 1). Specifically, the navigation process
has been evaluated at five positions as reflected in Ta-
ble 2. These results show how the number of trian-
gles has considerably been reduced, the system man-
ages less than 100 triangles instead of the 70.000 from
the original scene. Therefore we obtain an important
reduction representing the 0,14% of the global scene
geometry.
With regards to graphical results, Figure 15 shows
the same urban scene with different kind of illumina-
tions. The first image (Figure 15(a)) depicts the scene
after disabling all sources of light. The second image
(Figure 15(b)) considers the same night scene with
local illumination from a single light source with-
out shadows. Finally, the last image shows the night
scene with local illumination and the shadows gener-
ated by our method.
Another important advantage of our method is the
reduced amount of memory needed to store the polar
diagram structure. As Table 3 shows, the four po-
lar diagrams only take up 175.125 bytes. This value
is significantly low considering the high capacity of
the current computers, and the benefits obtained by
our approach described above. The table details the
memory requirements for each one of the polar dia-
gram components: polar axis (border lines between
polar regions), polar regions, polygons of the scene,
Table 2: Results for navigation using Polar Diagrams.
Position A B C D E
No. visible buildings 5 2 3 2 2
No. Building triangles 60 24 42 18 36
No. Ground triangles 30 12 21 9 18
Generation time (ms) 14 9 9 9 9
Visualization time (ms) 1 1 1 1 1
Table 3: Memory requirements (in bytes) for polar dia-
grams.
East+ East- West- West+ Total
Polar
axis
7,031 6,563 7,031 6,563 27,188
Polar
regions
21,5 19,938 20,75 21,063 83,25
Polygons 11,969 11,969 11,969 11,969 47,875
Rest of
fields
4,063 4,063 4,344 4,344 16,813
Total 44,563 42,531 44,094 43,938 175,125
and the rest of fields of the data structure.
6 CONCLUSIONS AND FUTURE
WORK
In this paper we have proposed a novel real-time
method based on polar diagrams to navigate through
night large virtual cities. The main strength of this
ANovelRay-shootingMethodtoRenderNightUrbanScenes-AMethodbasedonPolarDiagrams
61
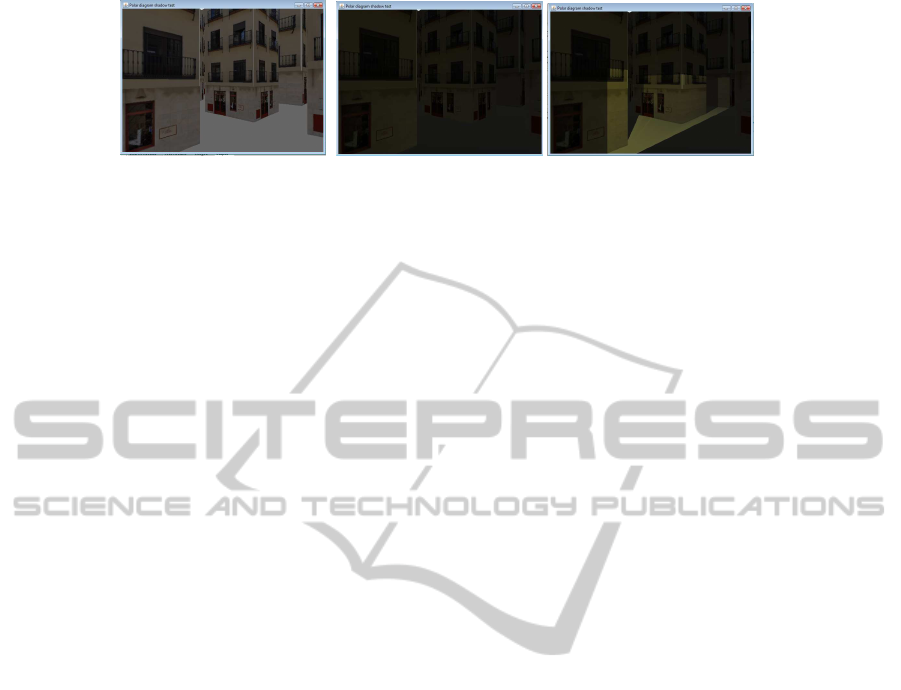
(a) No lighted scene (b) Night scene. Local illu-
mination without shadows
(c) Night scene. Local illu-
mination and shadows gen-
erated using our method
Figure 15: Visual results.
method is the minimization of the geometry to be ren-
dered for a givenposition, independentlyof the size of
the scene. This feature makes this ray-casting method
suitable to be used for lighting large urban environ-
ments in web-based systems or low-capacity devices.
In view of the results, for 2.5D urban scenes, our visu-
alization times have outperformed those obtained by
classical methods like shadow maps and shadow vol-
umes. Moreover, as our algorithm is independent of
the screen resolution it is guaranteed the maximum
quality with different kind of devices and without any
additional geometry processing.
For future work we also consider to implement the
proposed algorithms in the GPU by using OpenCL
or WebCL. In our opinion we would take advantage
of parallelizing the ray-casting process as well as the
polar diagram construction. Furthermore, we want to
extend our method to deal with mobile light sources
since the topological relationships associated to polar
diagrams enable the extension of this problem, as well
as for navigation (Robles-Ortega et al., 2009). We
think it is possible to obtain good results with a low
extra cost.
As this paper is focused on urban scenes, the
buildings remain static during the whole process.
However, we plan to study the cost of a dynamic up-
dating of the polar diagram. This scenario could be
useful in other 2.5 environments.
In addition, as it has been shown, once the polar
diagram has been generated, the computation of the il-
lumination region from a new light source is achieved
in real time. This outcome evinces the possibility of
extending, in a future work, the current proposal to
indirect illumination based on virtual point lights, for
instance.
Another possible extension is the use of area light
sources in order to generate soft shadows. The polar
diagram give us a good understanding of the neigh-
borhood and, intrinsically, it is not limited to point
light sources. In that case, the portion of the area light
source, visible from a given position, should be some-
how determined.
ACKNOWLEDGEMENTS
This work has been partially granted by the Con-
serjer´ıa de Innovaci´on, Ciencia y Empresa of the
Junta de Andaluc´ıa, under the research project
P07-TIC-02773
.
REFERENCES
Argudo, O., And´ujar, C., and Patow, G. (2012). Interactive
rendering of urban models with global illumination. In
Computer Graphics International, Bournemouth Uni-
versity, United Kingdom.
Bittner, J., Wonka, P., and Wimmer, M. (2005). Fast ex-
act from-region visibility in urban scenes. In Bala,
K. and Dutr, P., editors, Rendering Techniques 2005
(Proceedings Eurographics Symposium on Render-
ing), pages 223–230. Eurographics, Eurographics As-
sociation.
Buchholz, H. and Dollner, J. (2005). View-dependent ren-
dering of multiresolution texture-atlases. In Visualiza-
tion, 2005. VIS 05. IEEE, pages 215–222.
Chin, N. and Feiner, S. (1989). Near real-time shadow gen-
eration using bsp trees. ACM SIGGRAPH Computer
Graphics, 23(3):99–106.
Cignoni, P., Di Benedetto, M., Ganovelli, F., Gobbetti, E.,
Marton, F., and Scopigno, R. (2007). Ray-casted
blockmaps for large urban models visualization. Com-
puter Graphics Forum, 26(3):405–413.
Cohen-Or, D., Chrysanthou, Y., Silva, C., and Durand, F.
(2003). A survey of visibility for walkthrough appli-
cations. Visualization and Computer Graphics, IEEE
Transactions on, 9(3):412 – 431.
Cohen-Or, D., Fibich, G., Halperin, D., and Zadicario, E.
(1998). Conservative visibility and strong occlusion
for viewpace partitioning of densely occluded scenes.
In EUROGRAPHICS’98, volume 17, pages 243–253.
Di Benedetto, M., Cignoni, P., Ganovelli, F., Gobbetti, E.,
Marton, F., and Scopigno, R. (2009). Interactive re-
mote exploration of massive cityscapes. In The 10th
International Symposium on Virtual Reality, Archae-
ology and Cultural Heritage VAST (2009), pages 9–
16. Eurographics.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
62

Dorsey, J. and Rushmeier, H. (2008). Light and materials
in virtual cities. In ACM SIGGRAPH 2008 classes,
SIGGRAPH ’08, pages 8:1–8:4, New York, NY, USA.
ACM.
Durand, F., Orti, R., Rivi`ere, S., and Puech, C. (1996).
Radiosity in flatland made visibly simple: using the
visibility complex for lighting simulation of dynamic
scenes in flatland. In Proceedings of the twelfth an-
nual symposium on Computational geometry, SCG
’96, pages 511–512, New York, NY, USA. ACM.
Eisemann, E., Schwarz, M., Assarsson, U., and Wimmer,
M. (2011). Real Time Shadows. A K Peters/CRC
Press.
Germs, R. and Jansen, F. W. (2001). Geometric simplifica-
tion for efficient occlusion culling in urban scenes. In
Proc. of WSCG 2001, pages 291–298.
Grima, C. I., Marquez, A., and Ortega, L. (2006). A new 2d
tessellation for angle problems: The polar diagram.
Computational Geometry. Theory and Applications,
34(2):58 – 74.
Koldas, G., Isler, V., and Lau, R. W. H. (2007). Six degrees
of freedom incremental occlusion horizon culling
method for urban environments. In ADVANCES IN
VISUAL COMPUTING, PT I, volume 4841 of Lecture
Notes in Computer Science, pages 792–803.
Musialski, P., Wonka, P., Aliaga, D. G., Wimmer, M., van
Gool, L., and Purgathofer, W. (2013). A Survey of
Urban Reconstruction. Computer Graphics Forum,
Early View.
Okabe, A., Boots, B., and Sugihara, K. (1992). Spatial Tes-
sellations: Concepts and Applications of Voronoi Di-
agrams. John Wiley and Sons.
Ortega, L. and Feito, F. (2005). Collision detection using
polar diagrams. Computer & Graphics, 29(5):726–
737.
Ortega, L. and Robles-Ortega, M. D. (2013). Applied math-
ematics & information sciences. ACM Trans. Graph.,
pages 1651–1669.
Pocchiola, M. and Vegter, G. (1993). The visibility com-
plex. In Proceedings of the ninth annual symposium
on Computational geometry, SCG ’93, pages 328–
337, New York, NY, USA. ACM.
Revanth, N. R. and Narayanan, P. J. (2012). Dis-
tributed massive model rendering. In Proceedings
of the Eighth Indian Conference on Computer Vision,
Graphics and Image Processing, ICVGIP ’12, pages
42:1–42:8. ACM.
Robles-Ortega, M., Ortega, L., Coelho, A., Feito, F., and
de Sousa, A. (2013). Automatic street surface model-
ing for web-based urban information systems. Journal
of Urban Planning and Development, 139(1):40–48.
Robles-Ortega, M. D., Ortega, L., and Feito, F. (2009). An
exact occlusion culling method for navigation in vir-
tual architectural environments. In Proceedings of the
IV Iberoamerican Symposium in Computer Graphics,
pages 23–32.
Wonka, P. and Schmalstieg, D. (1999). Occluder shadows
for fast walkthroughs of urban environments. Com-
puter Graphics Forum, 18(3):51–60.
Wonka, P., Wimmer, M., and Sillion, F. (2001). Instant visi-
bility. Computer Graphics Forum, 20(3):C411+. 22nd
Annual Conference of the European-Association-for-
Computer-Graphis, MANCHESTER, ENGLAND,
SEP 04-07, 2001.
Zara, J. (2006). Web-based historical city walks: advances
and bottlenecks. Presence: Teleoper. Virtual Environ.,
15(3):262–277.
ANovelRay-shootingMethodtoRenderNightUrbanScenes-AMethodbasedonPolarDiagrams
63
