Solving Single Vehicle Pickup and Delivery Problems with Time
Windows and Capacity Constraints using Nested Monte-Carlo Search
Stefan Edelkamp and Max Gath
Institute for Artificial Intelligence, TZI - Center for Computing and Communication Technologies, Bremen, Germany
Keywords:
Nested Monte-Carlo Search, Single Vehicle Pickup and Delivery Problem (PDP), Traveling Salesman
Problem (TSP), Routing and Scheduling Problems.
Abstract:
Transporting goods by courier and express services increases the service quality through short transit times
and satisfies individual demands of customers. Determining the optimal route for a vehicle to satisfy transport
requests while minimizing the total cost refers to the Single Vehicle Pickup and Delivery Problem. Beside time
and distance objectives, in real world operations it is mandatory to consider further constraints such as time
windows and the capacity of the vehicle. This paper presents a novel approach to solve Single Vehicle Pickup
and Delivery Problems with time windows and capacity constraints by applying Nested Monte-Carlo Search
(NMCS). NMCS is a randomized exploration technique which has successfully solved complex combinatorial
search problems. To evaluate the approach, we apply benchmarks instances with up to 400 cities which have
to be visited. The effects of varying the number of iterations and the search level are investigated. The results
reveal, that the algorithm computes state-of-the-art solutions and is competitive with other approaches.
1 INTRODUCTION
Especially in urban districts, transporting goods by
courier and express services increases the service
quality through short transit times and satisfies indi-
vidual demands of customers. However, determin-
ing optimal routes for the planning and control of
transport requests in real-world operations involves a
set of practical complications. For instance, it is of-
ten mandatory to consider time windows at incom-
ing goods departments and the maximum velocity of
vehicles. Moreover, courier, express, and parcel ser-
vices (CEP) provide direct transports from one cus-
tomer to another customer without storing the loads
at a central depot to minimize the transit times. Par-
ticularly in recent years, there is an increasing demand
for CEP services by e-commerce companies to offer
same-day deliveries.
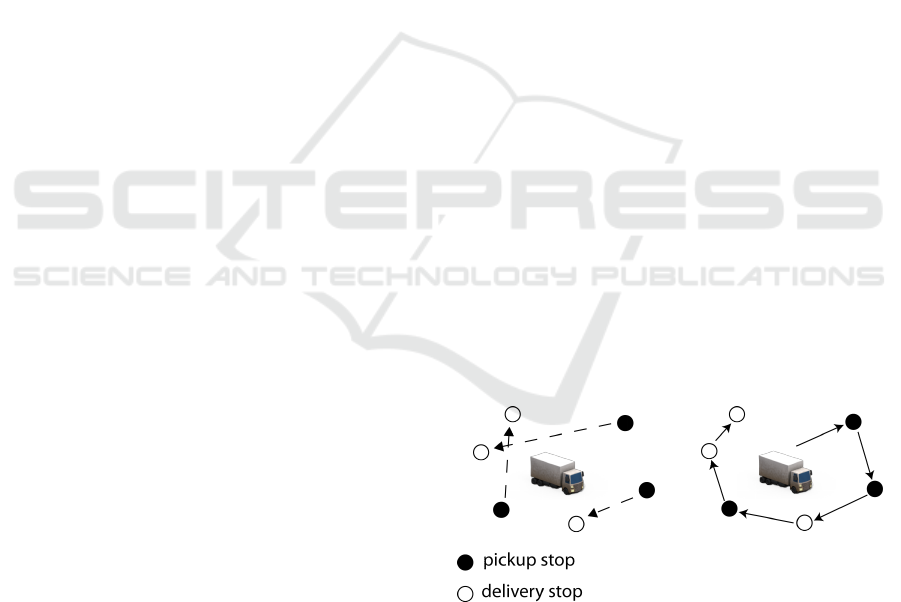
This paper addresses the Single Vehicle Pickup
and Delivery Problem (1VPDP) (Parragh et al., 2008),
which is concerned with determining a least cost
route for a single vehicle to satisfy customer requests
for transporting objects from an origin to a desti-
nation, while considering additional constraints (see
Figure 1). Thus, the particular application area is the
paired pickup and delivery of goods, which is also
known as the Traveling Salesman Problem (TSP) with
Figure 1: The Single Vehicle Pickup and Delivery Problem
and a solution with three orders (and six stops).
pickups and deliveries (PD) as well as time windows
(TW) and capacity (C) constraints.
Motivated by the success in (very-close-to) opti-
mal solving TSPs with time windows (TSPTWs) with
Nested Monte-Carlo Search (NMCS) (Cazenave and
Teytaud, 2012; Edelkamp et al., 2013) for transporta-
tion requests from and to a designated depot, in this
work we look at advances in combinatorial and ran-
domized search for the 1VPDPTW.
Orders are pairs of locations associated with the
resource and time constraints for the transport. For n
orders we obtain 2n + 1 possible locations of trans-
port actions. In our application, we work on an
underlying transport infrastructure represented by a
weighted graph. The initial distance matrix between
22
Edelkamp S. and Gath M..
Solving Single Vehicle Pickup and Delivery Problems with Time Windows and Capacity Constraints using Nested Monte-Carlo Search.
DOI: 10.5220/0004722300220033
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 22-33
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

pickup and delivery locations and a designated depot
are determined by shortest-path(s) searches. In sim-
plified benchmark settings, straight-line distances are
applied to points in the plane.
The paper is structured as follows. Firstly, Sec-
tion 2 specifies the single vehicle PDP formally and
provides an overview of solution methods. Next, we
introduce NMCS and focus on its application to the
TSP. Section 3 presents the developed approach for
solving 1VPDP with NMCS with policy adaptation.
The evaluation including the description of applied
benchmarks, the experimental setup, and the results
are provided in Section 4. Moreover, we investigate
how to configure the approach to reach the best results
within shortest time. Finally, Section 5 concludes the
paper.
2 RELATED WORK
Section 2.1 gives an overview of the Pickup and De-
livery Problem (PDP) and specifies the problem for-
mally. Next, Section 2.2 introduces Nested Monte-
Carlo Search (NMCS) and focuses on its application
to the Traveling Salesman Problem (TSP).
2.1 The Single Vehicle PDP
There are single- and multiple-vehicle PDP vari-
ants. In the literature single-vehicle problems are
also denoted as TSPs with pickup and deliveries
(TSPPD) (Gendreau et al., 1999; Hern
´
andez-P
´
erez
and Salazar-Gonz
´
alez, 2004). While the classical
PDP considers the multiple-vehicle variant to trans-
port all kinds of goods, the so-called dial-a-ride prob-
lem (DARP) (Cordeau and Laporte, 2003b) or hand-
icapped persons transportation problem (Toth and
Vigo, 1997) deals with passenger transport where ad-
ditional objective functions like minimizing the trans-
port times of the passengers have to be satisfied. In
unpaired PDPs transported goods are homogeneous
and exchangeable. Thus, each good can be deliv-
ered to any customer. In paired PDPs every good has
a unique sender and recipient. Most PDP variants
are hard combinatorial optimization problems (Ap-
plegate et al., 2011). The following definition of PDPs
extends the description provided by (Parragh et al.,
2008).
Definition 1 (Pickup-and-Delivery Problem). Let V
denote a set of vehicles and S a set of service requests.
Service requests are a super set of a set of pickup re-
quests P ⊂ S and a set of delivery request D ⊂ S \ P.
Thus, each service request is either a pickup request
p ∈ P or a delivery request d ∈ D. Moreover, O de-
notes a set of orders. An order o ∈ O contains exactly
one pickup request p
o
and one delivery request d
o
.
Given the costs c
v
i, j
for a vehicle v ∈ V for traveling
from i ∈ S to j ∈ S and choosing indicator variables
x
v
i, j
=
1, if (i, j) is part of the vehicle v’s tour
0, otherwise
(1)
the general objective function of PDP is
min
∑
v∈V
∑
j∈S
∑
i∈S
c
v
i, j
· x
v
i, j
(2)
with subject to
∑
v∈V
∑
i∈S
x
v
i, j
= 1 for all j ∈ S (3)
∑
v∈V
∑
j∈S
x
v
i, j
= 1 for all i ∈ S (4)
∑
v∈V
x
v
i, j
=
{
0,1
}
for all i, j ∈ S (5)
∑
v∈V
∑
j∈S
∑
i∈S
x
v
i, j
≤ |Y | − 1 for all Y ⊆ S. (6)
In a paired PDP the pickup and delivery requests
of an order o have to be served by the same vehicle v.
This is guaranteed by
∑
i∈S
x
v
i,p
o
−
∑
i∈S
x
v
i,d
o
= 0 for all i ⊆ S and v ∈ V. (7)
Moreover, time-window constraints as well as
time consumption at the warehouse/customer have to
be considered. If l
s
denotes the latest pickup/delivery
time, t
s
the time consumption of the loading or un-
loading process, r
s
the release time at s ∈ S and time
v
i, j
vehicle v’s time for driving from i to j
x
v
i, j
= 1 ⇒ l
j
≥ r
j
+t
j
+time
i, j
(8)
has to be fulfilled. It is obvious that the pickup request
p
o
has to be visited before the delivery request d
o
can
successfully be satisfied. Thus, we require
(x
v
i,p
o
= 1 ∧ x
v
i,d
o
= 1) ⇒ l
p
o
≤ r
d
o
. (9)
In addition, we have to ensure that the maximum ca-
pacity of a vehicle is not exceeded at any time. Let C
v
s
denote the current capacity of vehicle v at stop s ∈ S
and M
v
the maximum capacity of vehicle v, we re-
quire
C
v
s
≤ M
v
for all s ∈ S,v ∈ V. (10)
In our case we solve PDPs for one vehicle. Thus
the number of vehicles is restricted to |V | = 1. Note
that the definition leaves open, if the vehicle have to
return to the depot or not.
In the last decades, numerous efficient heuris-
tics and meta-heuristics have been developed for the
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
23
transportation domain and particularly in the area of
PDPs. There are exact solution methods (Ropke et al.,
2007) as well as numerous fast algorithms and meta-
heuristics for solving large problem instances like
tabu-search (Cordeau and Laporte, 2003a), simulated
annealing (Bent and Hentenryck, 2006), genetic algo-
rithms (Pankratz, 2005), and ant systems (Gajpal and
Abad, 2009), just to name a few.
The first exact algorithm to optimally solve the
Single Vehicle Pickup and Delivery Problem with dy-
namic programming has been presented by (Psaraftis,
1983). However, the solver was limited to solve only
small problem instances with up to 10 service re-
quests. Thus, also meta-heuristics have been applied
to solve medium- and large-sized problems such as
generic algorithms (Jih and Hsu, 2004), tabu-search
(Landrieu et al., 2001), as well as simulated anneal-
ing and hill climbing methods (Hosny and Mumford,
2010).
2.2 Nested Monte-Carlo Search with
Policy Adaptation
Monte-Carlo Search is a randomized search algorithm
which iteratively performs random searches, so-called
rollouts, within the search space, until the algorithm
finds a valid solution, a maximum amount of time
is elapsed, or a maximum number of rollouts have
been performed. The search method has particularly
been applied, to solve problems with a huge search
space where no adequate lower and upper bounds are
available. In contrast, nested rollouts perform an ad-
ditional heuristic that determines next moves within
the rollouts, to guide the search (Yan et al., 2004).
In further applications, this heuristic is improved suc-
cessively to apply the algorithm for solving challeng-
ing combinatorial problems such as Klondike Soli-
taire (Bjarnason et al., 2009). Nested Monte-Carlo
Search (NMCS) (Cazenave, 2009) extends this ap-
proach by the concept of levels. At each level l, for
each possible move (decision) at the current node of
the decision tree it performs nested rollouts in level
l − 1. Recursively, level l − 1 investigates all pos-
sible successor moves of the selected move in level
l. If level l = 0, the search executes a random roll-
out. The best result in each level is propagated to
the higher level, to identify and choose the best move
found. Consequently, at each level, the best result has
to be saved, because searches in lower levels may find
worse solutions.
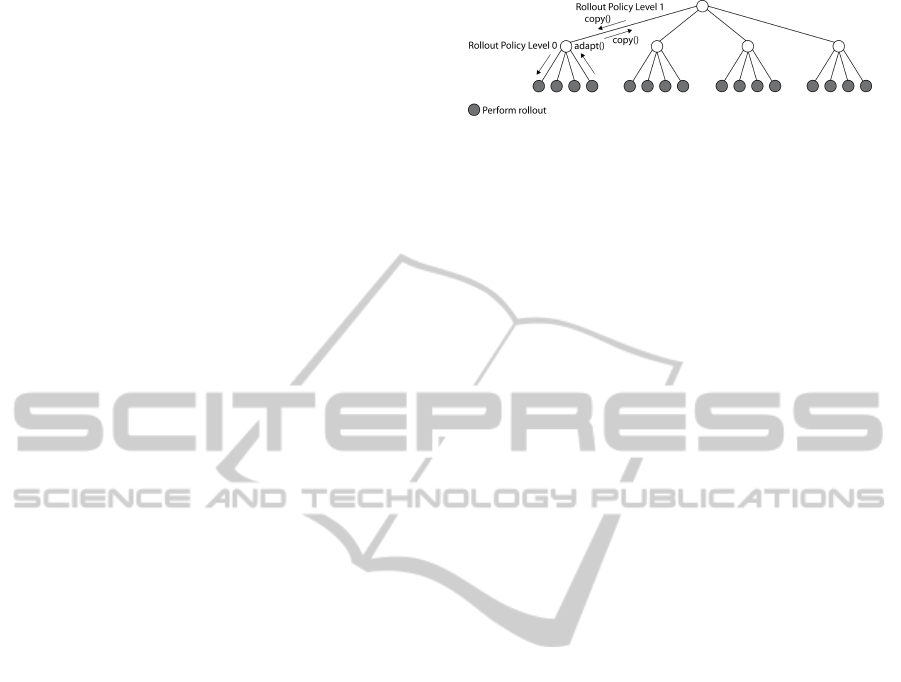
NMCS has been further extended by adapting the
policy during the search and introducing the con-
cept of iterations (Rosin, 2011). Thus, if n denotes
the number of iterations, the algorithm performs n
Figure 2: An example of Nested Rollouot Policy Adaptation
(NRPA) with 2 level and 4 iterations.
searches in each level. While the NMCS investi-
gates all possible moves in depth d = l of the deci-
sion tree in level l −1, Nested Rollout Policy Adapta-
tion (NRPA) executes n nested searches in level l − 1,
that all start at the root of the decision tree and fol-
low a policy until they reach a leaf. After a search in
level l − 1 has been performed, the results are eval-
uated at level l and the policy is updated by the best
solution currently found. Beside, a learning rate α ad-
justs the impact of the solution found in level l − 1 to
the policy of level l. The algorithm is successfully ap-
plied for solving Crossword Puzzles as well as Mor-
pion Solitaire (Rosin, 2011). Figure 2 shows an ex-
ample of the NRPA search with 2 level and 4 itera-
tions. In addition, it illustrates the effects of higher-
and lower-level searches to the policy. Thus, the pol-
icy is either progressed, adapted, or copied. A com-
prehensive survey about Monte-Carlo search is pro-
vided by (Browne et al., 2012).
Recently, NRPA search has also been applied to
efficiently solve the well-known Traveling Salesman
Problem with Time Windows (TSPTW) optimal or
very close to the optimum for small problem instances
up to 50 cities (Cazenave and Teytaud, 2012). As
described, at level l = 0 of the recursive search a
nested rollout is invoked. The likelihood to chose a
move within a rollout is determined by the policy and
by three additional well-known heuristics for vehicle
routing problems, that are derived from (Solomon,
1987). Therefore, the resulting Bolzmann softmax
policy considers
1. the distance from the last city to the next city,
2. the amount of wasted time, if a city is visited too
early,
3. as well as the remaining time until the latest visit-
ing time of a following city.
Moreover, (Cazenave and Teytaud, 2012) extended
further domain specific knowledge to solve TSPTWs
with NRPA by restricting the possible successors
within the rollout function. With highest priority, they
force to visit cities, that reached the end of their lat-
est visiting time. The general idea is, to visit these
cities next, because they have to be visited anyway
and this has to be taken into account within further
rollouts. With second highest priority the algorithm
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
24
only considers cities, that not avoid to visit any other
cities afterwards in time.
If hard constraints such as time windows and
capacity constraints are not satisfied within a tour,
the costs increase significantly for each violation.
In this case, the result of a rollout is a constraint
violating tour. Consequently, the algorithm mini-
mizes constraint violations with highest priority. De-
tails of the algorithm for solving TSPTWs are pro-
vided by (Cazenave and Teytaud, 2012). Algorith-
mic refinements to accelerate the search are given
by (Edelkamp et al., 2013).
3 NRPA FOR SOLVING
SINGLE-VEHICLE PDPTW
For solving small- and medium-sized single vehicle
PDPs, we extended the NRPA algorithm for TSPTWs
of (Cazenave and Teytaud, 2012). We differ be-
tween problems with a vehicle whose capacity is re-
stricted by exactly one shipment at the moment and
a vehicle whose capacity is restricted by volume or
weight but independent by the number of transported
goods. Concerning both problems, pickup and de-
livery requests imposed by customer orders can be
viewed as cities in a particular TSP. Nevertheless, it
remains possible to have several requests at one loca-
tion. Therefore, each request is modeled as a unique
city which is located at the same location with identi-
cal coordinates.
3.1 Unit Capacities
If the delivery has to be executed immediately after
the pickup, we encounter the Stacker Crane Problem
(SCP) (Srour and van de Velde, 2013). Time window
constraints (TW) may be enforced. In the SCP of n
pickup and delivery orders, each delivery has to be ex-
ecuted immediately after the pickup is made. This can
be a result of imposed unit capacity, as a vehicle can
only serve one order at the same time. The SCP(TW)
is mapped back to an Asymmetric TSP(TW) as fol-
lows: the shortest path length from each delivery lo-
cation d
o
of an order o, is connected to all pickup loca-
tions j ∈ P. As a result, the input for the ATSP-solver
is a weighted matrix of size (n + 1) × (n + 1).
This mapping allows to apply the TSP(TW) solver
directly to solve SCPs. Including capacity constraints
solving the SCP is simple as the NMCS approach is
based on rollouts, where the capacity constraints can
be incrementally checked while constructing the tour.
3.2 General Capacities
Beside time window and capacity constraints, it is ob-
vious to ensure that the pickup stop of an order has
to be visited before the delivery stop. Due to trans-
porting several goods at the moment, the constraint
that the pickup stop of an order is immediately fol-
lowed by the delivery stop is relaxed. As a result, the
size of the distance matrix for n orders increases to
(2n + 1) × (2n + 1). Thus, the complexity is increas-
ing significantly.
Algorithm 1: NRPA search function for 1PVDPTWs.
1: procedure SEARCH(level,iterations )
2: best.score = MAX VALUE
3: if level == 0 then
4: eval = ROLLOUT()
5: best.score = eval
6: best.tour = tour
7: else
8: policyGlobal[level] = polGlobal
9: for i = 0 ; i < iterations ; i + + do
10: r = SEARCH(level − 1, iterations)
11: if score < best.score then
12: best.score = r.score
13: best.tour = r.tour
14: ADAPT(best.tour, level)
15: end if
16: end for
17: polGlobal = policy[level]
18: end if
19: return best
20: end procedure
The recursive search function is shown in Algo-
rithm 1. The level-specific policy at each level l is up-
dated if a better solution in level l − 1 has been found.
As recently as all iterations have been executed, the
global policy, which is applied by the rollout func-
tion, is updated. If the algorithm reaches level 0, the
search function performs a rollout.
The rollout function is the most important proce-
dure applied in NMCS. It samples one tour from the
root until a complete tour is found at a leaf by fol-
lowing the global policy. The implementation of the
rollout function for the 1VPDPTW is shown in Algo-
rithm 2. Using flags, already visited successors are
eliminated from the set of possible successors, so that
any generated solution is a permutation. The number
of violations to the enforced constraints is included
into the cost function evaluation which is returned by
the NMCS search procedure. Each violation is scaled
with a constant (10
6
in our case). Further simplifica-
tions to the code have been applied, because in some
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
25

benchmarks there is no need to return to the depot
and the makespan ms (the accumulated time at which
the city is visited) can be optimized instead of the
costs (because the objective function is to minimize
the time and not the driven distance).
The procedure shown in Algorithm 2 extends the
rollout function for the TSPTW solver of (Cazenave
and Teytaud, 2012) and (Edelkamp et al., 2013).
Firstly, we deactivate a TSP-related refinement for the
computation of the successor set. In contrast to the
original implementation provided by (Cazenave and
Teytaud, 2012), we do not enforce a successor if a
violation is certain. In small-sized problems choos-
ing the first-fail strategy might accelerate the search
because bad moves are identified early and prevented
by the policy in further runs. However, in medium-
sized problems it is preferable to improve the policy
first, because in the exponential growing state space
the first fail strategy would consume too much effort
until all failures are included in the policy and there
is less time left to further improve the policy by good
solutions. First test-runs in larger 1VPDPs revealed
a significant improvement of the solution quality as
well as of the time performance without the first-fail
strategy. Thus, the successors are only determined by
the following remaining heuristic (lines 5-19). All not
visited successors i are checked, if it is possible to sat-
isfy all hard constraints. As hard constraints are not
fulfilled, the respective successor is no more consid-
ered. Next, for each remaining successor the proce-
dure checks if there is another not visited successor j
which cannot be visited after i. If the check is pos-
itive, also this i is removed from the set of possible
successors.
If the successor set is empty, a default tour permu-
tation is applied by considering only the precedences
between pickup and delivery stops. Thus, the check(i)
method enforces that every order’s pickup precedes
its delivery (lines 20-26).
As the set of possible successors is fixed, a ran-
dom choice based on the current global policy is ap-
plied (lines 27-36). The biased choice of a successor
refers to (roulette wheel) fitness selection in genetic
algorithms. If the successor has been determined, the
tour is extended by one city (either pickup or deliv-
ery location), all violations are counted, and the while
loop continues for finding the next city (lines 37-51).
Algorithm 3 depicts the adapt procedure. More
precisely, in a rollout for an existing policy P children
s
0
for a state s are chosen wrt. e
P(s,s
0
)
. Initially, all
policy values are set to 0. As the entire state-to-state
table surely is too big, it is projected to an essential
part to be learned, which is a measurement for going
from one city to the next.
Algorithm 2: NRPA rollout function for 1VPDPTWs.
1: procedure ROLLOUT
2: tourSize = 1
3: while tourSize < N do
4: sum = s = 0
5: for i = 1 ; i < N ; i + + do
6: if vis[i]! = 0∧ CHECK(I) then
7: succ[s + +] = i
8: for j = 1 ; j < N ; j + + do
9: if vis[ j] ∧ i! = j∧
10: CHECK(J) then
11: if l[i] > r[ j]∨
12: ms + d[city][i] > r[ j] then
13: s − −
14: break
15: end if
16: end if
17: end for
18: end if
19: end for
20: if s == 0 then
21: for i = 1 ; i < N ; i + + do
22: if !vis[ j]∧ CHECK(J) then
23: succ[s + +] = i
24: end if
25: end for
26: end if
27: for i = 0 ; i < N ; i + + do
28: value[i] = EXP( policy[city][succ[i]])
29: sum+ = value[i]
30: end for
31: random = rand[0...sum − 1]
32: i = 0
33: sum = value[0]
34: while sum < m do
35: sum+ = value[+ + i]
36: end while
37: prev = city
38: city = succ[i]
39: tour[tourSize + +] = city
40: vis[city] = true
41: cost+ = d[prev][city]
42: ms = MAX(ms + d[prev][city], l[city])
43: cap = weight[city]
44: if cap > maxCap then
45: viol++;
46: end if
47: if ms > r[city] then
48: viol++;
49: end if
50: end while
51: return 10
6
∗ viol + cost
52: end procedure
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
26

Algorithm 3: NRPA adapt function.
1: procedure ADAPT(tour, level)
2: for i = 1 ; i < N ; i + + do
3: visited[i] = false;
4: end for
5: node = 0;
6: for p = 1 ; p < N ; p + + do
7: successors = 0;
8: for i = 1 ; i < N ; i + + do
9: if !vis[i] then
10: moves[successors++] = i;
11: end if
12: end for
13: policy[level][node[tour[p]] += 1.0;
14: z = 0.0;
15: for i = 1 ; i < successors ; i + + do
16: z+= EXP(polGlobal[node][moves[i]]);
17: end for
18: for i = 1 ; i < successors ; i + + do
19: policy[level][node][moves[i]] -=
20: EXP(polGlobal[node][moves[i]])/z;
21: end for
22: node = tour[p];
23: visited[node] = true;
24: end for
25: end procedure
Given a solution sequence in form of a tour
that improves the current best one, policy adaption
now performs gradient decent as follows. The se-
quence of successor cities s
0
= (s
0
0
,...,s
0
l
) of s =
(s
0
,...,s
l
) with s
i+1
= s
0
i
has probability Prob(s, s
0
) =
∏
l
j=0
e
P(s
j
,s
0
j
)
/
∑
l
i=0
e
P(s
j
,s
0
i
)
. The gradient of the loga-
rithm at j of this term is 1 − e
P(s
j
,s
0
j
)
/
∑
l
i=0
e
P(s
j
,s
i
)
, so
that we add 1 to the selected successor city and sub-
tract e
P(s
j
,s
0
j
)
/
∑
l
i=0
e
P(s
j
,s
0
i
)
from the others. This en-
sures that policy adaptation increases the probability
of the established tour.
To further accelerate the search, we provide an ini-
tial policy which is based on the shortest-path distance
between pickup and delivery locations.
4 EVALUATION
In general, NMCS has two parameters which affect
the solution quality: the number of iterations and the
level. In Section 4.1 we investigate the effects of vary-
ing the level and the number of iterations in a small
and in two medium-sized problems, to determine ad-
equate configurations for application. For the evalu-
ation of small-sized problems, we applied the bench-
Figure 3: The solution quality for the 1VPDPTW with 20
orders measured by the average number of violated con-
straints of 10 runs for each level and iteration pair.
mark provided by (Jih and Hsu, 2004)
1
. It includes
problem instances with 10 to 100 orders (20 to 200
pickup and delivery stops) that have to be processed.
In order to evaluate medium-sized problems, we ap-
plied the benchmark given by (Hosny and Mumford,
2007)
2
which includes problems with 100 up to 200
orders (between 200 and 400 stops). The benchmark
sets include pickup and delivery stops including time
windows and customer demands as well as the initial
location and maximum capacity of the vehicle. Note
that in both benchmarks the objective function is to
minimize the total working time of the vehicle and it
is not required to return to the depot. The distances
between cities are determined by the Euclidian dis-
tance.
Section 4.2 compares the performance of our ap-
proach on small-sized problem instances to the best
solution computed with a genetic algorithm (Jih and
Hsu, 2004). Section 4.3 considers the performance
in medium-sized problem by comparing the results
to the methods provided by (Hosny and Mumford,
2010). Finally, Section 4.4 discusses an iterative
widening strategy for a parameter-fee implementation
of NMCS.
4.1 Parameter Configuration
Firstly, we investigate the effects of varying the num-
ber of iterations and the levels on a small 1VPDPTW
with only 20 orders (40 stops which have to be vis-
ited). In order to determine meaningful results, we
look at the average values of 10 runs for each con-
figuration. As the complete run requires to perform
iterations
level
rollouts, the search is terminated ear-
lier. Due to the fact, that rollouts are the most ex-
1
The benchmark set is available at http://wrjih.
wordpress.com/2006/12/09/pdptw-test-data/.
2
The benchmark set is available at http://users.
cs.cf.ac.uk/M.I.Hosny/PDP.zip.
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
27
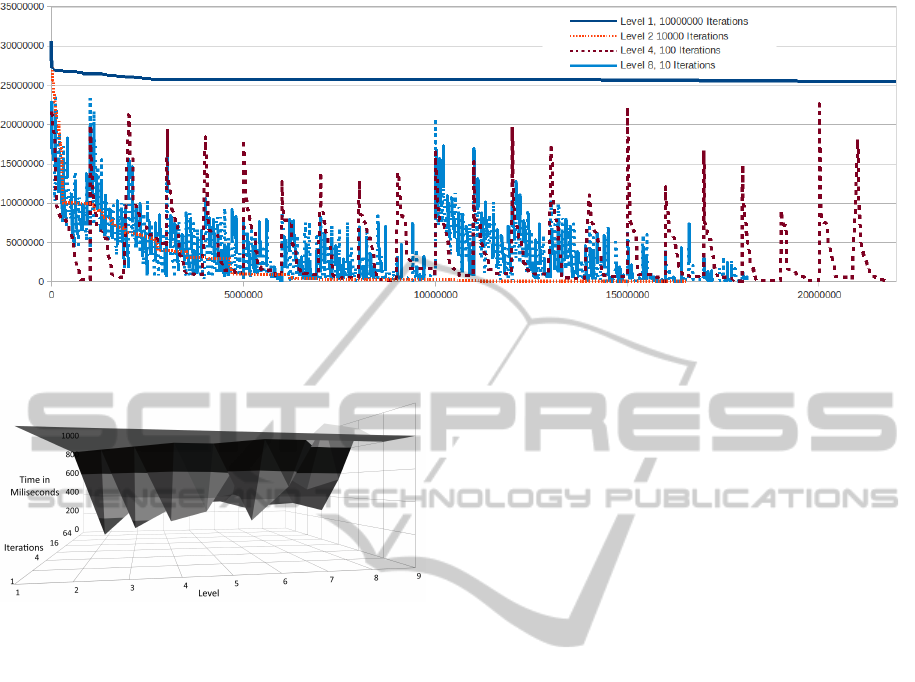
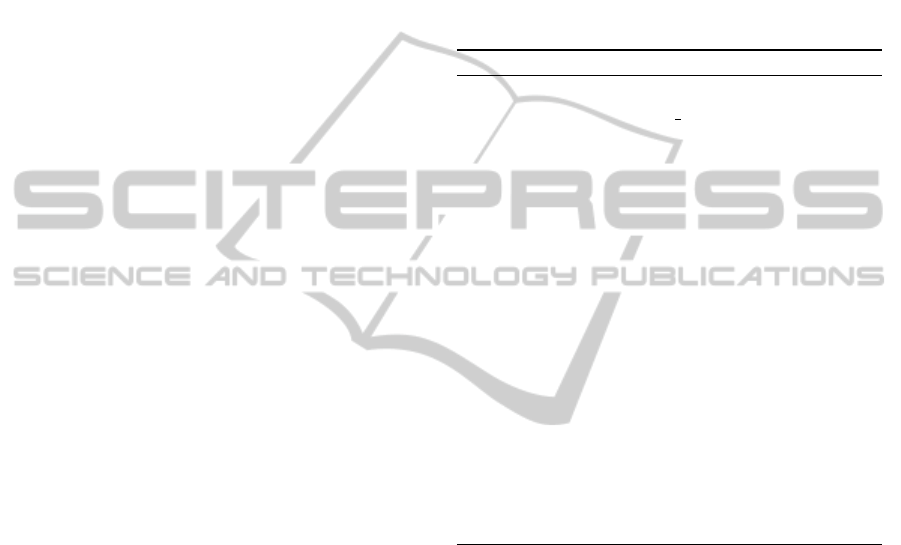
Figure 5: Learning curves for solution quality of the 1VPDPTW 100 benchmark with different NMCS parameters (the x-axis
shows the number of rollouts, while the y-axis the change solution quality for each improvement in a level).
Figure 4: The average computation time of 10 runs for each
level and iteration pair for the results (shown in Figure 3)
for a 1VPDPTW with 20 orders.
pensive operations within the algorithm, it terminates
at the latest after performing 40,000 rollouts. Note
that the algorithm has no knowledge about the best
or optimal solution. Even if it determines the opti-
mal solution quite early, it continuous the search until
all rollouts are performed or a termination is forced.
Figure 3 shows the solution quality measured by the
average number of violated constraints. The results
show that a minimum amount of rollouts have to be
performed to compute adequate results. Thus, feasi-
ble solutions are guaranteed with 4 iterations and at
least 8 levels (max 4
8
= 65, 536 rollouts) or at least
64 iterations and 2 levels (max 64
2
= 4, 096 rollouts).
Consequently, Figure 4 investigates the time for de-
termining the first found best solution, which refers
to the respective solution in Figure 3.
Figure 4 reveals that a level 2 search with 64
iterations determines feasible solutions in less than
100 milliseconds on average while increasing the
level leads to higher computation times in small-sized
1VPDPTW. In addition, the results proofs that there
is no significant difference if the number of levels is
increased and the search is terminated after a fix num-
ber of rollouts. This is obvious, because, e.g., a level
4 search is included in the level 5 search. Thus, if the
algorithm terminates in the level 4 search the level 5
search is never executed and increasing the level has
no impact.
Next, we evaluated several configurations to solve
the 100 1VPDPTW benchmark provided by (Jih and
Hsu, 2004). Figure 5 displays a cross-comparison be-
tween different parameters for NMCS plotting num-
ber of runs (x-axis) against solution quality (y-axis).
The best result for the 100 1VPDPTW could be ob-
tained with level 2 and 10,000 iterations, while no
solution was computed with level 16 and 3 itera-
tions (even after hours of waiting) and level 1 with
100,000,000 iterations.
The results reveal, that at least 600 iterations are
required to determine feasible solutions. In contrast to
small-sized problems, this is caused by the increased
complexity of the problem. While the number of it-
erations determines the exploitation rate, the level ef-
fects the exploration of the search space. In difficult
problems, more exploitation is required to determine
qualitative solutions. Only qualitative solutions lead
to a qualitative adaption of the global policy. If not
enough iterations are applied, the adaptation of the
global policy is not sufficient goal directed.
As the number of iterations is low, it is obvious
that the level 3 search outperforms the level 2 search,
because level 2 search terminates earlier while the
level 3 search continues looking for better solutions.
If the number of iterations is sufficient large to de-
termine qualitative solutions, Figure 6 indicates that
level 2 is slightly preferred to level 3. As more qual-
itative solutions are determined, a higher level allows
more exploration than a lower level. This prevents to
get stuck in local minima.
Finally, we investigate the effects of increasing
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
28

the level on medium-sized problems with 200 orders
(400 stops). Figure 6 compares several numbers of
iterations of level 2 and level 3 searches for the 200
PDPTW benchmark provided by (Jih and Hsu, 2004).
The performance figures contain the average values of
10 runs for each configuration and level respectively.
The second diagram, which describe the score con-
siders only feasible solutions, while the third diagram
depicts the computation time for determine the first
best solution. All runs are terminated at the latest af-
ter three hours.
After the investigation of a small (20 orders), a
medium (100 orders), a larger (200 orders) sized
problem, and of two further problem instances with
60 and 80 orders with similar outcome that strengthen
the presented results (not shown in this paper), we
conclude that decreasing the search level and increas-
ing the number of iterations lead to better results for
solving difficult 1VPDPTW with NMCS within short
computational time. Indeed, at both ends of the spec-
trum, i.e., with level 1 and level 16 NMCS in Figure 5,
we could not find any solution. The reason is that a
level 1 NMCS is a series of pure rollouts (that is com-
parable to a greedy search), and policy learning is too
weak to direct the search towards finding feasible so-
lutions, while a level 16 NMCS simply forgets too
much about previous trials. In this case, we observe
the classical extremes of exploration and exploita-
tion. However, in the general case it is more relevant
to determine qualitative solutions to adapt the global
policy qualitatively instead of guiding the search to-
wards new directions and adapting the global policy
by lower quality solutions. The results strengthen this
for 1VPDPTWs.
4.2 Small-sized Problems
The experiments ran on an Intel(R) Core(TM) i7-
2620M CPU at 2.7 GHz. The computer was equipped
with 16 GB RAM. The memory requirements of our
NMCS implementation are insignificant and domi-
nated by the size of the policy, which is bounded by
O(l · n
2
) for n locations and a Level l NMCS. The al-
gorithm described in Section 3.2 is implemented in
JAVA.
Table 1 shows the results of running the NMCS al-
gorithm on the benchmark provided by (Jih and Hsu,
2004). Table 2 examines the results achieved with the
best genetic algorithm (MX2(FCGA)) developed by
(Jih and Hsu, 2004) on the same benchmark. The
results pinpoint that the solution quality of both al-
gorithms is nearly identically (only for the 20 PDP a
single score point is not achieved with NMCS). How-
ever, applying NMCS is more reliable. In 37 of 40
runs the NMCS computed feasible solutions, while
the genetic algorithm has an average success rate of
82.92% to find feasible solutions (after performing
180 runs in total). Moreover, if the NMCS determines
a feasible solution, this this also the best solution. In
addition, the computation time of NMCS is signifi-
cant lower (but note that the results of the genetic al-
gorithm were computed several years before and no
hardware configuration is presented).
Next, we compared the performance to the al-
gorithm provided by (Hosny and Mumford, 2010).
While the general quality of these results is nearly the
same, in some instances the presented solutions are
better than the optimal solutions determined with dy-
namic programing (Jih and Hsu, 2004). Thus, these
results have to be wrong or at least inconsistent with
the description in the text. We tried different cost
functions to reproduce the error (e.g., by dropping
waiting times at stops) but failed alike. However, if
we compare the solution quality and success rate for
finding feasible solutions NMCS is still competitive.
In conclusion, we showed that NMCS determines
state-of-the-art solutions in small-sized problems and
has a higher success rate for finding feasible solutions.
Thus, applying NMCS on this benchmark is more re-
liable than the approaches presented by (Jih and Hsu,
2004) and (Hosny and Mumford, 2010).
4.3 Medium-sized Problems
All experiments ran on an Intel(R) Core(TM) i5-
2520M CPU at 2.5 GHz. The memory requirements
are insignificant negligible (see Section 4.2).
Table 3 shows that the algorithm solves problems
with up to 200 orders (400 stops) that have to be pro-
cessed. For a sequence of 10 runs, we provide in-
formation on the best and the median solution costs
(because in case of constraint violation the average
value is increasing rapidly). We show the fraction of
valid and best solutions found and provide the aver-
age number of runs required to obtain the best so-
lution. The maximum number of runs is implicitly
given by the limit of the search tree: for the level-
2 NMCS with 2N iterations, the experiment termi-
nates after (2N)
2
runs. The run-times given are worst-
and average-cases and enforced by either solving the
problem with the best possible solution or by hitting
the limited number of runs - first solutions are usually
established much earlier.
As we compare the results with the solutions com-
puted by the most efficient approach (a genetic al-
gorithm) provided by (Hosny and Mumford, 2010),
the NMCS computes solutions with similar quality.
Also the rate of success for finding optimal and fea-
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
29
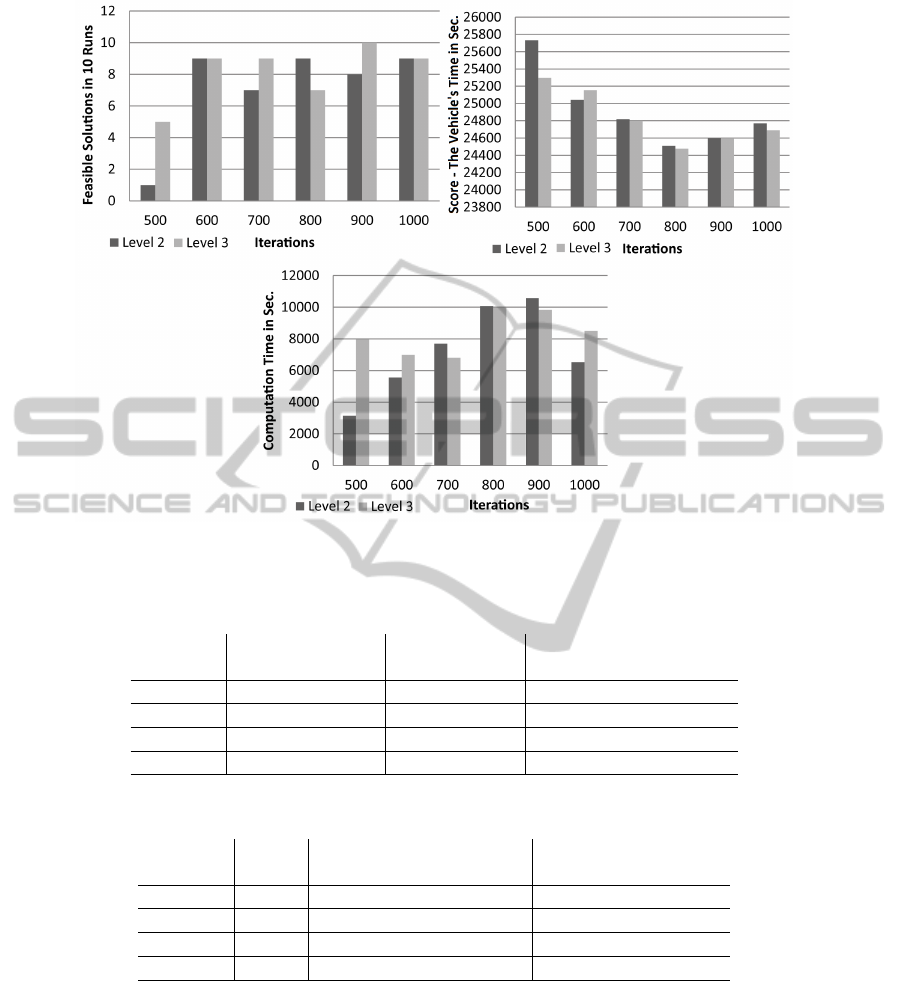
Figure 6: Feasible solutions, the respective average solution quality, and the average time for computing the first best solutions
for level 2 and level 3 searches with a varying number of iterations.
Table 1: NMCS (Level-3, 128-Iterations) performed on Jhi’s PDP Benchmark (Jih and Hsu, 2004).
Value Percentage CPU Time
Instance Best Median Valid Best Average Worst-Case
PDP 20 2031 2031 10/10 10/10 0.476s 3.028s
PDP 60 5658 5658 7/10 7/10 100.436s 349.533s
PDP 80 7849 7849 10/10 10/10 101.654s 273.658s
PDP 100 10600 10600 10/10 10/10 495.767s 790.347s
Table 2: The best results achieved with the MX2(FCGA) algorithm on Jhi’s PDP Benchmark (Jih and Hsu, 2004).
Value Percentage CPU Time
Instance Best Valid (180 runs) Best ≈ Average (180 runs)
PDP 20 2030 100 11/30 ≤ 100s
PDP 60 5658 87.22 30/30 300s
PDP 80 7849 80.56 1/30 1400s
PDP 100 10600 63.89 26/30 2300s
sible solutions is approximately equally. However,
also in this benchmark set in some instances Hos-
ney’s genetic algorithm finds solutions which are bet-
ter than the optimal solution computed with dynamic
programming approaches by (Jih and Hsu, 2004) (see
Section 4.2). Thus, we suppose that small deviations
to the solutions of the generic algorithm may caused
by this.
Finally, the results proof that NMCS computes
valid and state-of-the-art results for medium-sized
1VPDPs. The quality of the results as well as the
rate of success for finding feasible and best known
solutions reveal, that NMCS is competitive to other
heuristic and meta-heuristic approaches.
4.4 Iterative Widening
Further experiments investigated the performance of
a parameter-free implementation of NMCS that ap-
plies iterative widening. Instead of imposing a fixed
number of iterations for each instance, we gradually
increase it within the search process. The natural op-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
30

Table 3: 10 runs of NMCS (Level-2, 2N-Iterations) in Hosny’s PDP Benchmark (Hosny and Mumford, 2007).
Value Percentage Runs CPU Time
Instance N Best Median Valid Best Solution Average Maximum Worst-Case Average
PDP 100 201 9757.00 9757.00 8/10 8/10 102067 161604 6m3s 3m36s
PDP 110 221 11641.03 11641.03 10/10 10/10 144622 195364 8m32s 6m5s
PDP 120 241 12143.00 12143.00 10/10 10/10 96217 232324 7m4s 5m21s
PDP 130 261 14057.00 14057.00 10/10 10/10 146995 272484 17m39s 9m6s
PDP 140 281 15111.00 15160.12 8/10 5/10 271614 315844 25m14s 20m38s
PDP 150 301 16976.00 16976.00 10/10 7/10 190111 362404 23m48s 16m36s
PDP 160 321 18167.00 18167.00 8/10 7/10 316842 412164 45m35s 34m33s
PDP 170 341 19924.00 19924.00 10/10 10/10 246747 465124 55m11s 28m46s
PDP 180 361 22107.29 22107.29 10/10 10/10 244314 521284 42m37s 30m16s
PDP 190 381 23826.00 23826.00 10/10 10/10 270967 580644 61m55s 35m25s
PDP 200 401 24184.00 24198.86 8/10 4/10 587384 643204 128m 111m
tion we chose is to use odd numbers yielding the se-
quence of squares 1, 4, 9, 16, ..., k
2
for the number
of iterations. The objective is to aim at first solutions
propagated bottom-up quickly and to work harder on
finding better ones later on in the solution process.
Other functions such as Luby sequences (Luby et al.,
1993) (successful in SAT (Een et al., 2007) solving)
are available, but have not been tested.
The experimental results for this approach are in-
deed promising. For instance, in another 10-fold
repeated experiment of Hosny’s 100 PDP problem
(cf. Table 3 first row) the optimal solution 9757 of
was found in all cases and obtained even faster with
3m13s (vs. 6m3s) worst-case, and 2m58s (vs. 3m36s)
average-case time.
If we consider only the feasible solutions (8 of
10 computed by the configured NMCS), the average
number of applied rollouts is decreased from 45,828
to only 16,574 by applying the parameter-free imple-
mentation (in worst case the number of required roll-
outs is reduced from 108,138 to 23,278). Thus, con-
sidering this problem of Table 3, the parameter-free
method is three times faster than the NMCS config-
ured with level 2 and 401 iterations.
5 CONCLUSIONS
In this paper, we presented a novel approach for solv-
ing Single Vehicle Pickup and Delivery Problems
with time windows and capacity constraints by apply-
ing Nested Monte-Carlo Search (NMCS). In order to
evaluate the approach and determine adequate param-
eter values for the level and the number of iterations,
we solved numerous instances with varying configu-
rations. Small-sized instances are retrieved from the
benchmark set provided by (Jih and Hsu, 2004), while
the medium-sized instances are gathered from (Hosny
and Mumford, 2007).
While the number of iterations determines the ex-
ploitation rate, the level effects the exploration of the
search space. In difficult problems, more exploitation
is required to determine qualitative solutions. Only
qualitative solutions lead to a qualitative adaption of
the global policy. If not enough iterations are applied,
the adaptation of the global policy is not sufficient
goal directed. The results showed that decreasing the
search level and increasing the number of iterations
lead to better results for solving complex 1VPDPTW
with NMCS within short computational time. Thus, it
is more relevant to determine qualitative solutions to
adapt the global policy qualitatively instead of guid-
ing the search towards new directions and adapting
the global policy by lower quality solutions.
From a machine learning point of view one of the
key observations is the object to be learned in form
of a policy (that generalizes from the state-to-state es-
timates) reflects the linkage of cities, i.e., which one
is the best to visit next in a short tour. This grad-
ually improved knowledge starting with some mea-
sure of initial distances is extremely helpful in guiding
the (random) search process to find improved tours:
knowing that a particular city is a good successor of
onother one is true not only for one, but for many
other tours. Only a few adaptions to the top level
policy are needed to drive the solver towards better
solutions.
Finally, the results revealed the NMCS is com-
petitive to other heuristics and meta-heuristics such
as genetic algorithms in small- and medium-sized
1VPDPTWs with 20 and 200 orders that have to be
processed. NMCS computes state-of-the-art solutions
and has a high rate of success for finding feasible
and best known solutions. With a limited amount of
domain-specific information (only a single heuristic
is applied in the rollout function) the algorithm han-
dles problems sizes with up to 200 orders in adequate
computation time.
Despite of extensive analyses to determine per-
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
31

tinent parameter configurations, initial experiments
showed that applying a Level-2 search and an itera-
tive widening strategy is indeed promising. By the
small memory overhead and the ease of parallelizing
NMCS (either with root or with tree parallelization),
we expect an essential scaling behavior on multiple
cores. Further research will focus on parameter-free
NMCSs.
ACKNOWLEDGEMENTS
The presented research was partially funded by
the German Research Foundation (DFG) within the
project Autonomous Courier and Express Services
(HE 989/14-1) at the University of Bremen, Germany.
REFERENCES
Applegate, D. L., Bixby, R. E., Chvatal, V., and Cook, W. J.
(2011). The traveling salesman problem: a computa-
tional study. Princeton University Press.
Bent, R. and Hentenryck, P. V. (2006). A two-stage hy-
brid algorithm for pickup and delivery vehicle routing
problems with time windows. Computers & Opera-
tions Research, 33(4):875–893.
Bjarnason, R., Fern, A., and Tadepalli, P. (2009). Lower
bounding klondike solitaire with monte-carlo plan-
ning. In ICAPS.
Browne, C. B., Powley, E., Whitehouse, D., Lucas, S. M.,
Cowling, P. I., Rohlfshagen, P., Tavener, S., Perez, D.,
Samothrakis, S., and Colton, S. (2012). A survey of
monte carlo tree search methods. Computational In-
telligence and AI in Games, IEEE Transactions on,
4(1):1–43.
Cazenave, T. (2009). Nested monte-carlo search. In IJCAI,
pages 456–461.
Cazenave, T. and Teytaud, F. (2012). Application of the
nested rollout policy adaptation algorithm to the trav-
eling salesman problem with time windows. In LION,
pages 42–54.
Cordeau, J.-F. and Laporte, G. (2003a). A tabu search
heuristic for the static multi-vehicle dial-a-ride prob-
lem. Transportation Research Part B: Methodologi-
cal, 37(6):579–594.
Cordeau, J.-F. and Laporte, G. (2003b). The Dial-a-Ride
Problem (DARP): Variants, modeling issues and algo-
rithms. Quarterly Journal of the Belgian, French and
Italian Operations Research Societies, 1(2):89–101.
Edelkamp, S., Gath, M., Cazenave, T., and Teytaud, F.
(2013). Algorithm and knowledge engineering for the
TSPTW problem. In IEEE Symposium Series on Com-
putational Intelligence (SSCI).
Een, N., Mishchenko, A., and S
¨
orensson, N. (2007). Apply-
ing logic synthesis for speeding up sat. In Theory and
Applications of Satisfiability Testing–SAT 2007, pages
272–286. Springer.
Gajpal, Y. and Abad, P. (2009). An ant colony system (acs)
for vehicle routing problem with simultaneous deliv-
ery and pickup. Computers & Operations Research,
36(12):3215–3223.
Gendreau, M., Laporte, G., and Vigo, D. (1999). Heuris-
tics for the traveling salesman problem with pickup
and delivery. Computers & Operations Research,
26(7):699–714.
Hern
´
andez-P
´
erez, H. and Salazar-Gonz
´
alez, J.-J. (2004).
A branch-and-cut algorithm for a traveling salesman
problem with pickup and delivery. Discrete Applied
Mathematics, 145(1):126–139.
Hosny, M. I. and Mumford, C. L. (2007). Single vehi-
cle pickup and delivery with time windows: made to
measure genetic encoding and operators. In Proceed-
ings of the 2007 GECCO conference companion on
Genetic and evolutionary computation, pages 2489–
2496. ACM.
Hosny, M. I. and Mumford, C. L. (2010). The single vehi-
cle pickup and delivery problem with time windows:
Intelligent operators for heuristic and metaheuristic al-
gorithms. Journal of Heuristics, 16(3):417–439.
Jih, W.-r. and Hsu, Y. (2004). A family competition genetic
algorithm for the pickup and delivery problems with
time window. Bulletin of the College of Engineering,
90:121–130.
Landrieu, A., Mati, Y., and Binder, Z. (2001). A tabu search
heuristic for the single vehicle pickup and delivery
problem with time windows. Journal of Intelligent
Manufacturing, 12(5-6):497–508.
Luby, M., Sinclair, A., and Zuckerman, D. (1993). Optimal
speedup of las vegas algorithms. Information Process-
ing Letters, 47(4):173–180.
Pankratz, G. (2005). A grouping genetic algorithm for the
pickup and delivery problem with time windows. OR
spectrum, 27(1):21–41.
Parragh, S. N., Doerner, K. F., and Hartl, R. F. (2008).
A Survey on Pickup and Delivery Problems Part II:
Transportation between Pickup and Delivery Loca-
tions. Journal f
¨
ur Betriebswirtschaft, 58(2):81–117.
Psaraftis, H. N. (1983). An exact algorithm for the single
vehicle many-to-many dial-a-ride problem with time
windows. Transportation Science, 17(3):351–357.
Ropke, S., Cordeau, J.-F., and Laporte, G. (2007). Models
and branch-and-cut algorithms for pickup and delivery
problems with time windows. Networks, 49(4):258–
272.
Rosin, C. D. (2011). Nested rollout policy adaptation for
monte carlo tree search. In IJCAI, pages 649–654.
AAAI Press.
Solomon, M. M. (1987). Algorithms for the vehicle rout-
ing and scheduling problems with time window con-
straints. Operations research, 35(2):254–265.
Srour, F. J. and van de Velde, S. (2013). Are stacker crane
problems easy? A statistical study. Computers & Op-
erations Research, 40(3):674 – 690.
Toth, P. and Vigo, D. (1997). Heuristic algorithms for the
handicapped persons transportation problem. Trans-
portation Science, 31(1):60–71.
Yan, X., Diaconis, P., Rusmevichientong, P., and Roy, B. V.
(2004). Solitaire: Man versus machine. In Saul, L. K.,
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
32

Weiss, Y., and Bottou, L., editors, Advances in Neu-
ral Information Processing Systems 17, pages 1553–
1560. MIT Press, Cambridge, MA.
SolvingSingleVehiclePickupandDeliveryProblemswithTimeWindowsandCapacityConstraintsusingNested
Monte-CarloSearch
33
