
Smartphone-based Activity Recognition using Hybrid Classifier
Utilizing Cloud Infrastructure for Data Analysis
Bingchuan Yuan, John Herbert and Yalda Emamian
Department of Computer Science, University College Cork, Cork, Ireland
Keywords:
ADLs, Smartphone, Wearable Wireless Sensor, Machine Learning, Cloud Infrastructure, Unsupervised
Learning, Real-time Activity Recognition.
Abstract:
Learning and recognizing the activities of daily living (ADLs) of an individual is vital when providing an
individual with context-aware at-home healthcare. In this work, unobtrusive detection of inhabitants’ activities
in the home environment is implemented through the smartphone and wearable wireless sensor belt solution.
A hybrid classifier is developed by combining threshold-based methods and machine learning mechanisms.
Features extracted from the raw inertial sensor data are collected from a Body Area Network (BAN) (consisting
of the Zephyr BioHarness sensor and an Android smartphone), and are used to build classification models
using different machine learning algorithms. A cloud-based data analytics framework is developed to process
different classification models in parallel and to select the most suitable model for each user. The evolving
machine learning mechanism makes the model become customizable and self-adaptive by utilizing a cloud
infrastructure which also overcomes the limitation of the computing power and storage of a smartphone.
Furthermore, we investigate methods for adapting a universal model, which is trained using the data set of all
users, to an individual user through an unsupervised learning scheme. The evaluation results of the experiments
conducted on eight participants indicate that the proposed approach can robustly identify activities in real-time
across multiple individuals: the highest recognition rate achieved 98% after a few runs.
1 INTRODUCTION
As health awareness increases and technology ad-
vances, there is an increasing demand for an auto-
mated healthcare infrastructure that provides round-
the-clock assessment of a subject’s well being
(Singer, 2011). Remote healthcare monitoring in a
Smart Home is a potential solution allowing an el-
derly person to remain living safely and indepen-
dently. A Smart Home environment usually consists
of three main components: pervasive sensors, an in-
telligent reasoning system and actuators. Sensors are
low level devices that capture changes in the home
environment. Data streamed from sensors can be in-
terpreted by the reasoning system for rapid detection
of events in real-time. Certain event information can
then be sent over the Internet to a Remote Monitoring
Server and intelligent decisions can be made to allow
the actuators to adjust the environment. This kind of
infrastructure is the next generation of personal home
healthcare.
Our previous work (Yuan and Herbert, 2011b;
Yuan and Herbert, 2011a; Yuan and Herbert, 2012)
describes CARA (Context-aware Real-time Assistant)
an intelligent system especially designed for perva-
sive healthcare. The ability to accurately recognize
and continuously monitor activities of daily living
(ADLs) is one of the key features that CARA is ex-
pected to provide. ADL is associated with both phys-
ical and mental health and is a primary indicator
of quality of life (Skelton and McLaughlin, 1996).
Indeed, some age-related diseases(cognitive impair-
ments, mild dementia and Parkinson’s disease) have a
direct impact on the ADL of the elderly (White et al.,
2001). Activity recognition has been studied as part
of a healthcare solution to reduce the necessity for
carer supervision of individuals. Activity recognition
can also be used in conjunction with pattern recogni-
tion to detect changes in a subject’s routine.
In this paper, a novel and robust ADL recognition
approach is developed and evaluated. The solution in-
volves identifying a user’s activity through the com-
bined use of inertial sensors(accelerometer and gyro-
scopes) built-in to the smartphone along with a wear-
able wireless sensor attached to the chest. Raw sensor
data are collected, filtered and extracted into different
features. These features are then used to build and
update classification models using several machine
14
Yuan B., Herbert J. and Emamian Y..
Smartphone-based Activity Recognition using Hybrid Classifier - Utilizing Cloud Infrastructure for Data Analysis.
DOI: 10.5220/0004723900140023
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages 14-23
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

learning algorithms. The most remarkable part of our
approach is that it is able to refine the classification
model through a cloud-based data analytics frame-
work so that it becomes customizable and adaptive
to different individuals. As a hybrid system, a thresh-
old based method is used to distinguish static and dy-
namic activities and a rule-based reasoning mecha-
nism is applied to identify simple static activities and
a machine learning classifier is used to classify com-
plex dynamic activities which significantly improves
the cost efficiency under the limitation of computing
power of a mobile device. Furthermore, by combin-
ing the wearable wireless sensor and the smartphone,
the average recognition rate of ADL can achieve over
95% in a real usage environment.
2 STATE OF THE ART AND
RELATED WORK
Advances in ubiquitous and pervasive computing
have resulted in the development of a number of sens-
ing technologies for capturing information related to
human physical activities. Two approaches for activ-
ity recognition have been extensively studied using
different underlying sensing mechanisms. The first
method relies upon environmental sensors (e.g. RFID
tags, cameras) to track aspects such as motion, loca-
tion and object interaction (Tapia et al., 2004). It is a
promising approach for recognizing activities, but the
major hurdle in implementing these systems outside
of trials is how intrusive these sensors are. Usually a
large investment is involved in setting up and main-
taining the system, and in some cases it is only feasi-
ble for use in laboratory conditions.
The second method uses a Body Area Network
(BAN) to track the acceleration of specific limbs as
well as the body as a whole. Some of the existing
work on wearable sensor based activity recognition
uses several accelerometers placed on different parts
of the body (Tapia et al., 2007). Other research has ex-
plored the use of multiple kinds of wearable sensors
for activity recognition (e.g. accelerometers, temper-
ature sensors and microphones)(Maurer et al., 2006).
Wearable sensors are often non-invasive, unobtrusive
and require less effort to set up. Nevertheless, most
of the wearable sensors are required to be fixed onto
special locations on the subject’s body which makes
it inconvenient and impractical for continuous long
term monitoring. While the ubiquity of smartphones
and their capability to support sensor data collection,
processing and communications make them an alter-
native platform to wearable sensors. Recently, re-
searchers have been working on using smartphones
as mobile sensing and computing platforms to achieve
activity recognition (J.R. Kwapisz and Moore, 2010;
Khan et al., 2010; Stefan et al., 2012). However, the
performance of these approaches is less effective due
to the ambiguity of upper body movement tracking.
To improve it, our approach makes use of two sets of
sensors; instead of using a single smartphone an addi-
tional Zephyr BioHarness sensor was used to monitor
trunk movement. The recognition rate was dramati-
cally improved by this combination, as shown in the
evaluation results.
On the other hand, activities of daily living in the
home environment can be generalized into two cat-
egories. Simple motionless activities, such as sit-
ting, standing, lying and bending, correspond to a
static posture of the human body. These activities
may be mostly recognized by using a threshold based
method (Lyons et al., 2005). Complex dynamic activ-
ities, such as walking stairs, cooking, sweeping and
washing hands, involve multiple overlapping actions.
These activities can be recognized by identifying pat-
terns of people’s movement (Ravi et al., 2005). We
build on these approaches and extend them to test
the ability of real-time identification of daily activi-
ties through the combination of the aforementioned
methods.
Using a smartphone as a primary device for data
collection and processing increases the likelihood of
data coverage and represents a minimal maintenance
commitment and cost to the user. However, there
is a limitation of the hardware resource in a smart-
phone when processing heavy machine learning tasks.
Fortunately, the emerging of cloud computing could
solve the problem. As a delivery model for IT ser-
vices, cloud computing offers a cost-effective way to
support data analysis technologies with high flexibil-
ity, scalability and availability for accessing data, dis-
covering patterns, and deriving models. There are
lots of ongoing research on mobile cloud computing,
and a wide range of potential mobile cloud applica-
tions have been recognized in the literature (Huerta-
Canepa and Lee, 2010; Frederking and Brown, 2010;
Marinelli, 2009). These applications fall into different
areas such as image processing, natural language pro-
cessing, multimedia search and sensor data manage-
ment. In this work, we focus on introducing a cloud-
based data analytics framework especially designed
to refine classification models for activity recognition
using multiple machine learning methods. By uti-
lizing the cloud infrastructure, the smartphone, even
with limited computational resources, can perform
intelligent real-time classification and this provides
novel functionality in our solution.
Smartphone-basedActivityRecognitionusingHybridClassifier-UtilizingCloudInfrastructureforDataAnalysis
15

Collect accelerometer and gyroscope
data from sensors
Start
End
Extract features from 1-second analysis
window until data is fully processed
Distinguish static and dynamic activities
using threshold-based method
Load classification model
Convert acceleration to angles(degree)
Determine activity according to the
posture of body and legs
Sitting Standing Bending Lying
Build dataset for classification
Static Dynamic
Activity recognition using machine
learning classifier
Walking Running
Walking Stairs WashingHand
Apply threshold to the confidence of
classification output
Unknown Activity Recognized Activity
Confidence < 0.9 Confidence ≥ 0.9
Cloud-based
Model Optimization
Activity recognition output
Figure 1: Flowchart of activity recognition.
3 MATERIALS AND METHODS
3.1 Activity of Daily Living
Previously, we have developed a reasoning frame-
work for CARA pervasive healthcare that can help
extend independent living for the elderly in a smart
home environment by monitoring the person and am-
bient changes to detect anomaly situations (Yuan and
Herbert, 2012). For a smart home based monitoring
system, it is important to detect human body move-
ment which can provide the basic activity context. By
combining activity context along with other environ-
mental contexts, the context-aware monitoring system
is able to perform better reasoning for healthcare. In
this paper, we focus on introducing how the system
recognizes human activities through BAN without as-
sistance of any smart home sensors. The basic activ-
ity of daily living can be divided into two categories:
static posture and dynamic movement. Static pos-
ture indicates the position of the body which consists
of Sitting, Standing, Lying, Bending and Leaning
back, whereas dynamic movement is the compilation
of a series of multiple actions. The dynamic activi-
ties we considered in our system include: Walking,
Running, Walking Stairs, Washing Hands, Sweep-
ing, Falling. A custom-design Android application
for activity recognition has been implemented and run
on Samsung Galaxy III. The control flow is as fol-
lows:
1. The machine learning classification model is
loaded from the cloud.
2. Raw data are collected from BioHarness sensors
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
16
and smartphone build-in accelerometer and gyro-
scope sensors.
3. The signals are then low-pass filtered and a 1s
window is moved over the signal and overlapped
every 500ms.
4. The features corresponding to each window are
extracted.
5. Static and dynamic activities are distinguished us-
ing a threshold-based method where a threshold
value of the acceleration is applied.
6. Static activities are divided into sitting, stand-
ing, bending, lying and leaning back by applying
threshold angles for both trunk and thigh.
7. Dynamic activities are classified using machine
learning classifier based on the dataset of ex-
tracted features.
8. Activities are labelled as correctly classified if the
output confidence is high enough.
9. Features and activity label of each detected case
are stored in the data file.
10. Recognized activity is used to retrain the classi-
fier and update the classification model using the
cloud-based data analysis framework.
The process of activity recognition is summarised in
Fig. 1 and further details are described in the follow-
ing sections.
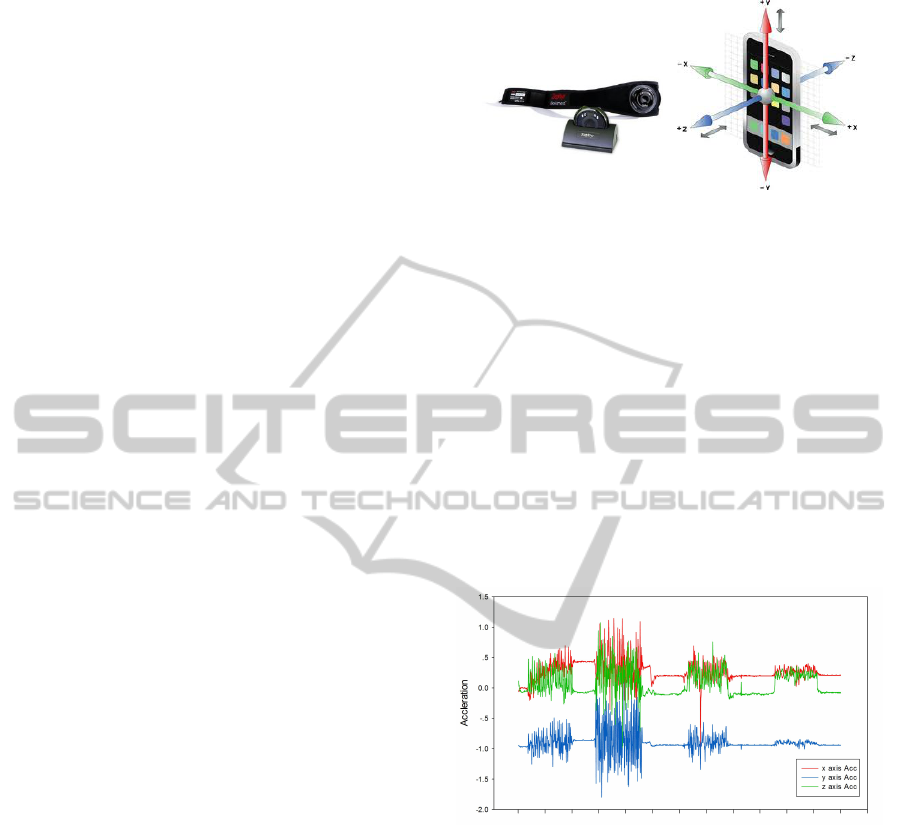
3.2 Data Collection
The data were collected by using a Samsung Galaxy
SIII mobile phone (Samsung Inc., 2012) and wear-
able Zephyr BioHarness sensor as shown in Fig. 2(a)
(Zephyr Inc., 2011). The embedded tri-axial ac-
celerometer and gyroscope sensor measure the 3D-
acceleration and orientation of the smartphone. The
three axes of acceleration are dependent upon the ori-
entation of the phone, the x-axis runs parallel to the
width of the phone, the y-axis runs the length of the
phone, and the z-axis runs perpendicular to the face
of the phone, as shown in Fig. 2(b). The sensor in-
tegrated into the mobile device is easy to use without
assistance and can be carried comfortably for long pe-
riods of time (Choudhury and Consolvo, 2008). The
data collection was done by performing experiments
on eight postgraduate students at University College
Cork, Ireland. Subjects were asked to perform a series
of activities while carrying the smartphone in the front
pocket of their trousers and the BioHarness sensor on
the chest. The BioHarness sensor data were transmit-
ted to the smartphone through a Bluetooth connection
in real-time. We created an application running on a
(a) Zephyr BioHarness (b) 3D-acceleration
Figure 2: Body area network for sensor data collection.
tablet device that communicates with the smartphone
while the subject performed the activities. The tablet
worked as a monitor and a controller that displays the
label of the ongoing activity and controls the phone to
start or stop recording activity data. 9 channels of sen-
sor readings, 3D-acceleration and orientation of the
thigh and 3D-acceleration of the trunk with associated
timestamps (ThighACCx, ThighACCy, ThighACCz,
ThighGYROx, ThighGYROy, ThighGYROz, Trunk-
ACCx, TrunkACCy, TrunkACCz) were collected and
subsequently used for the evaluation of the activity
classification algorithms. Fig. 3 illustrates the sample
of raw sensor data collected by the smartphone.
Figure 3: Plot of raw 3-axis acceleration of the smartphone.
3.3 Feature Extraction
As to the sampling frequency, the sensors in the An-
droid phone trigger an event whenever the accelerom-
eter or gyroscope values change. The rate of events
can be set to one of four thresholds: fastest, game,
normal, and UI, with fastest being the fastest sam-
pling rate and UI being the slowest. In order to bal-
ance the speed of data processing and activity feature
extraction, the sampling rate for the experiment was
set to normal which is about 15Hz and we found it is
fast enough for the daily activity classification.
Standard classifiers do not work well on the raw
sensor data. It is essential to transform the raw data
into a representation that captures the salient features
of the raw data. This is typically performed by break-
Smartphone-basedActivityRecognitionusingHybridClassifier-UtilizingCloudInfrastructureforDataAnalysis
17

Table 1: Description of features extracted from raw sensor data.
Feature Trunk Accelerometer Thigh Accelerometer Thigh Orientation
Min X, Y, Z, Peak ACC X, Y, Z, Absolute ACC Azimuth, Pitch, Roll, Absolute GYRO
Max X, Y, Z, Peak ACC X, Y, Z, Absolute ACC Azimuth, Pitch, Roll, Absolute GYRO
Mean X, Y, Z, Peak ACC X, Y, Z, Absolute ACC Azimuth, Pitch, Roll, Absolute GYR
Standard Deviation X, Y, Z, Peak ACC X, Y, Z, Absolute ACC Azimuth, Pitch, Roll, Absolute GYRO
Zero Cross X, Y, Z X, Y, Z Azimuth, Pitch, Roll
Mean Cross Peak ACC Absolute ACC Absolute GYRO
Angular Degree X, Y, Z X, Y, Z
ing the continuous data into windows of certain du-
ration. In this work, we experimented with one sec-
ond time window which is overlapped by one half of
the window length. Hence, each window is a sin-
gle instance, but any given data point contributes to
two instances. This method has been shown to be ef-
fective in earlier work using accelerometer data (Bao
and Intille, 2004). Table 1 summarized a number of
features extracted from each window. Each window
was represented as a feature vector of length 66. The
processed data were saved in the smartphone in an
arff(Attribute-Relation File Format) file for data anal-
ysis.
3.4 Threshold-based Mechanism
Among all the features, the standard deviation of ac-
celeration indicates the variability of the accelerome-
ter signal for each 1-s window of recorded data. High
variability would be expected during dynamic activi-
ties whereas static activities result in low variability.
Thresholds are then applied to the standard deviation
of both the smartphone and BioHarness accelerome-
ter signals. If either signal is above the threshold for
that second the activity is considered dynamic and if
both of them are below the threshold, the activity is
deemed static. Thresholds were determined empiri-
cally from the collected data. The threshold for trunk
acceleration was set at 0.25 m/s
2
and threshold for
thigh acceleration was set to 0.2 m/s
2
to ensure that
all motionless activities are detected. Fig. 4 shows an
example of the standard deviation threshold for Bio-
Harness accelerometer readings.
θ
degrees
=
180
π
arccos(
a
g
) (1)
When the activity is deemed static, the mean ac-
celerations over the one second window are converted
to a corresponding inclination angle using the arc co-
sine transformation of Eq. 1, where a is the mean
acceleration, g is the gravity of earth, θ in degrees
corresponds to the angles of the trunk and thigh. Spe-
cific trunk and thigh inclination ranges are set based
Figure 4: Standard deviation threshold for trunk accelerom-
eter signals.
on the finding of Lyons et al. (Lyons et al., 2005).
They proposed the best estimate threshold which ac-
curately reflect real-life trunk and thigh ranges. How-
ever, they only considered three static activities, sit-
ting, standing and lying. In our work, we added two
more static activities, bending and leaning back, for
classification. The ranges of thigh and trunk angles
Table 2: Threshold in degrees for thigh and trunk posture
detection.
Thigh Posture Upper Thres. Lower Thres.
Vertical 0 45
Horizontal 45 90
Trunk Posture Upper Thres. Lower Thres.
Vertical -30 30
Bending 30 60
Horizontal | ± 90| |±60|
Leaning Back -60 -30
for each posture are listed in Table 2. Static activity is
classified according to the posture of trunk and thigh
using rule-based methods. In the trial, detection accu-
racies of 98% and greater were achieved for each of
the static activities.
3.5 Machine Learning Classifier
To recognize dynamic activities such as walking,
walking stairs and running, the machine learning clas-
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
18

sifier was trained to produce the classification model.
The Weka machine learning package (Witten et al.,
2011) was used in this study for the purposes of de-
veloping the machine learning mechanism for the ac-
tivity detection. This package provides a collection
of machine learning algorithms for data mining tasks
which can be used in the android application. Four
different machine learning algorithms were investi-
gated and evaluated in this work:
• Bayesian Network. A probabilistic graphical
model using estimator classes and quality mea-
sures.
• Decision Tree. Generates a decision tree and nav-
igates from the root of the tree down to a leaf for
classification.
• K-Nearest Neighbours. An instance-based clas-
sifier, classification is based on some similarity
function.
• Neural Network. A multiple layer of perceptron
that uses back propagation to classify instances
We used the default parameters associated with each
of the classifiers. The classifier obtains a model dur-
ing the training stage. After training, it can predict
the class membership for new instances using the
classification model. Based on our experiments we
have found that the performance of different classifier
varies from person to person which mostly depends
on the training dataset collected from each individual.
But overall, the Decision Tree algorithm has provided
more comprehensive results in terms of accuracy and
efficiency in comparison with the other algorithms.
The details of the experiment results are discussed in
Section 4.
3.6 Cloud-based Model Optimization
Data collected from all the subjects were pooled to-
gether to build a universal classification model, re-
ferred to as the Default Model in the rest of the pa-
per. It works as the default for each user only if there
is no existing personal model available for that user.
However, it is not the suitable model for a specific in-
dividual since the model is trained and evaluated us-
ing the data gathered from all users; the body and be-
haviour pattern of each user is different. In order to
improve the classification performance efficiently, we
introduced the idea of model adaptation for the opti-
mization of the machine learning classifier by utiliz-
ing the cloud infrastructure.
As shown in Fig. 5, the principle of model opti-
mization is to keep updating the classification model
for an individual user while the activity recognition
Build/Update
Models
Real-time
Classification
New Training
Dataset
Best Model
Upload
Datasetl
Model Evaluation
Download
Model
Unsupervised Learning
Client Cloud
Misclassified
Filtering
Figure 5: The process of model optimization.
task is carrying on. All the new users start with a de-
fault classification model, which in turn gets refined
and adapted to each individual user for better perfor-
mance when more activity data are available as users
carry the phone.
On the client side, real-time activity recognition
is carried out in the smartphone using the classifica-
tion model. An unsupervised learning scheme was ap-
plied to generate new training data which is based on
self-training using unlabelled data without any user
input. It reuses the predicted label and confidence
statistics generated by the machine learning classi-
fier during the inference process to select new training
samples. The adaptation method determines whether
a data sample is suitable for adaptation according to
the confidence level of the inference result and uses
high confidence samples. The new training data are
recorded in a data file in the smartphone and are up-
loaded to the cloud storage periodically.
On the cloud side, multiple worker roles are de-
ployed for analysing user’s activity data.
• Controller Node. Control and manage the flow
of incoming data and add the new messages in to
the Task Queue for further processing.
• Machine Learning Nodes. Each of the worker
roles reads a message from its own Task Queue
and starts producing a model based on a different
machine learning classifiers.
• Universal Node. A special machine learning
worker role that is designed to deal with data from
all the users to update the Default Model using a
dedicated classifier (e.g. Neural Network).
• Evaluation Node. Select the most suitable model
for a specific user by comparing the evaluation re-
sults of each classification model. Moreover, a
misclassified filter is also applied to the user’s data
after the best model is found.
Smartphone-basedActivityRecognitionusingHybridClassifier-UtilizingCloudInfrastructureforDataAnalysis
19

Cloud Environment
Blob
D4D3D2D1
Data Queue
U4U3U2U1
User Register Queue
M
Result Queue
M
U1
U4
Clients
Controller
D
Task Queue
D
D
D
DALL
Universal Model
Neural Networkl
Decision Tree
Bayesian Network
MnM3M2M1
Model Queue
Evaluation & Filter
(Get Best Model)
Worker Roles
Figure 6: Structure of cloud-based data analysis framework.
The process of classification model optimization is il-
lustrated in Fig. 6. The URL of the training data are
collected by the Controller node and assigned as dif-
ferent tasks to machine learning worker roles. The
data are then used to either build new classification
models in the case of a new user or refine the exist-
ing models. Moreover, the data is also fused with
the available data from all users to update the De-
fault Model for new user. In the experiment, four
worker roles worked in parallel to process machine
learning tasks. Each of the worker roles is designed
to handle one machine learning algorithm. The num-
ber of worker roles is able to be adjusted on demand
which makes use of the flexibility and scalability of
the cloud infrastructure. The models are generated
and evaluated for each machine learning classifier in
worker roles. After gathering the evaluation results of
all the models in the Evaluation node, the most suit-
able model is selected according to the performance
of each model. The data (combining new training data
and any previously existing data) of that user are then
filtered by a misclassified filter using the best model
and stored in the cloud storage as previous data. Once
the process is finished, the best model is sent back
to the user automatically. Thus, the new or updated
model can be used in the client for real-time classifi-
cation.
4 EXPERIMENTS AND RESULTS
Eight volunteers (five male, three female) were in-
volved in our experiments to help us evaluate the fea-
sibility of the proposed approach. The activity data
were collected in a home setting and recorded in data
files for training and testing machine learning clas-
sifiers. For supervised learning, subjects were asked
to perform static and dynamic activities sequentially
while carrying the smatphone and wearing the body
sensor. A controller application running on an An-
droid Tablet remotely controlled the smartphone to
start or stop recording activity data and to label the
recorded data on the fly. Firstly, we built the Person-
alized Model which is a completely user dependent
approach. It requires training machine learning clas-
sifier on each individual user’s activity data and gen-
erates a user dependent model for each user. Clearly,
this scheme is superior to other models in terms of
performance for a specific user, but its lack of us-
ability and scalability greatly limits its application.
In addition, the supervised learning scheme requires
a great effort of manually labelling the activity data
which is a tedious and heavy task for the user. To im-
prove it, we decided to move on to a semi-supervised
approach where a universal classifier is trained with
manually labelled data from all users (called the De-
fault Model). As we discussed in the last section, an
unsupervised learning scheme was applied to gather
new training data to update the model so that it gets
adapted to each individual user in a progressive man-
ner.
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
20
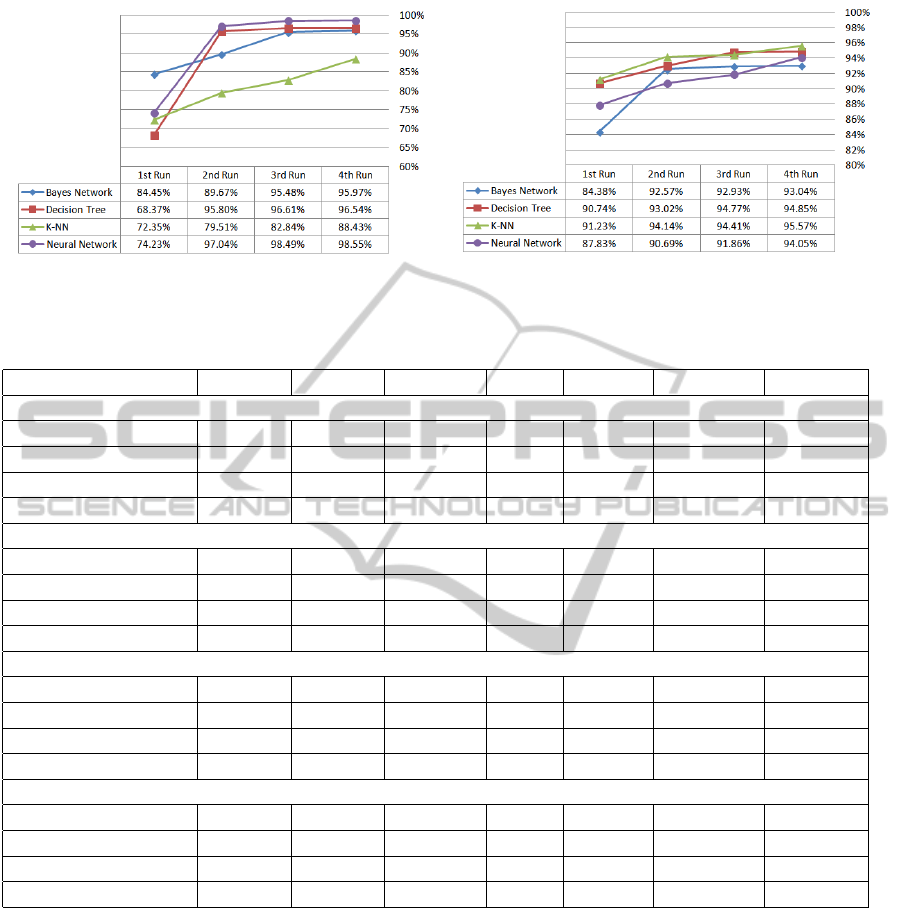
(a) Overall model accuracy for the female user A (b) Overall model accuracy for the male user B
Figure 7: Average accuracy of each machine learning classifier in four runs.
Table 3: Detail of performance of different classification models.
Classifier TP Rate FP Rate Precision Recall F-Score Time (ms) Accuracy
First Run (1980 instances −→ 1874 instances)
Decision Tree 0.684 0.034 0.839 0.684 0.657 1838 68.37%
Bayesian Network 0.845 0.011 0.931 0.845 0.860 2725 84.45%
K-Nearest Neighbour 0.724 0.044 0.811 0.724 0.684 4849 72.35%
Neural Network 0.742 0.040 0.811 0.742 0.720 84682 74.23%
Second Run (3493 instances −→ 3392 instances)
Decision Tree 0.958 0.006 0.960 0.958 0.957 1248 95.80%
Bayesian Network 0.897 0.010 0.943 0.897 0.899 1482 89.67%
K-Nearest Neighbour 0.795 0.036 0.860 0.795 0.763 5504 79.51%
Neural Network 0.970 0.004 0.972 0.970 0.970 145111 97.04%
Third Run (5482 instances −→ 5403 instances)
Decision Tree 0.966 0.006 0.967 0.966 0.966 1358 96.61%
Bayesian Network 0.955 0.005 0.967 0.955 0.958 1727 95.48%
K-Nearest Neighbour 0.828 0.031 0.873 0.828 0.810 7019 82.84%
Neural Network 0.985 0.002 0.985 0.985 0.985 227774 98.49%
Fourth Run (6790 instances −→ 6714 instances)
Decision Tree 0.955 0.007 0.958 0.965 0.965 1692 96.54%
Bayesian Network 0.960 0.005 0.966 0.960 0.962 1357 95.97%
K-Nearest Neighbour 0.884 0.020 0.899 0.884 0.881 9041 88.43%
Neural Network 0.985 0.002 0.986 0.985 0.985 281971 98.55%
The proposed cloud-based approach was tested on
two users(one female user A and one male user B).
The manually labelled data gathered from these two
users were used as the testing set to evaluate four clas-
sification models. Each user started with the Default
Model and was able to obtain his/her Adapted Model
after the first run. The model was refined and up-
dated while the experiment was carried on. After four
runs of each user, the overall accuracy of the classi-
fication model was boosted and the best performance
achieved was over 95% (see Fig. 7). The detailed re-
sults for each classification model obtained from each
run of User A are summarized in Table 3. It can
be observed that the performance of each model in
the first run is quite poor, because the Default Model
dose not suit the user very well. However, after up-
dating the Adapted Model and filtering the misclas-
sified instances in the next few runs, the accuracy of
most models remains consistently above 90% except
for K-NN. The best accuracy was obtained with the
Neural Network method while the most cost efficient
model was the Decision Tree. Note that the execution
time for building and evaluating the model using the
Decision Tree algorithm was around 1.5s on average
while the processing time of the Neural Network lin-
early decreased with the growth of the instances. In
this case, the Decision Tree was considered as the best
Adapted Model for this user. The Adapted Model rep-
Smartphone-basedActivityRecognitionusingHybridClassifier-UtilizingCloudInfrastructureforDataAnalysis
21

Table 4: Confusion matrix by using K-NN classifier in the Default Model.
Activity a b c d e f g h i j k l
WALKING (a) 1852 0 10 0 0 0 6 0 0 0 0 0
RUNNING (b) 1 1105 32 1 0 0 0 0 0 0 0 0
WALK STAIRS (c) 47 0 1937 4 0 0 1 4 0 0 2 0
SWEEPING (d) 6 0 1 1378 14 0 4 0 0 0 0 0
WASHING HANDS (e) 0 0 0 0 873 0 7 0 0 2 1 0
FALLING (f) 0 0 2 1 5 32 6 1 2 3 0 0
STANDING (g) 0 0 0 0 0 0 822 0 0 0 0 0
SITTING (h) 0 0 0 0 0 0 0 972 0 0 0 0
LYING (i) 0 0 0 0 0 0 0 1 649 0 0 0
BENDING (j) 0 0 0 0 0 0 0 0 0 718 0 0
LEANING BACK (k) 0 0 0 0 0 0 0 0 0 0 557 0
ROLLING (l) 0 0 4 10 1 1 1 5 8 0 1 187
resents a middle ground between the Default Model
and the Personalized Model; it got refined and even-
tually yielded 98% accuracy after four runs through
model optimization, and it is the model that is actu-
ally used in real-time activity recognition.
As for the Default Model, it was initially built
using the data collected from eight people using a
supervised learning scheme and then kept being up-
dated in the cloud once new data uploaded by any user
was available. Table 4 presents the confusion matrix
for the considered daily activities. The results were
obtained using a 10-fold cross-validation method to
evaluate the Default Model that was built by the K-
NN classifier. The matrix shows that most errors oc-
curred between Falling, Standing and lying. Never-
theless, the average accuracy is still over 95% since
the original Default Model was built through a super-
vised learning manner. The reason for misclassifying
Falling is that it is a quick action which usually in-
volves a series of static pre-actions and post-actions,
e.g. Standing and lying. So it is difficult to clas-
sify it through a machine learning model using a fixed
sliding window method. However, a threshold based
method would solve this problem because the change
of activity readings are dramatic at the moment peo-
ple fall. We evaluated this method and the recognition
rate of Falling was boosted from 62% to 91%.
Instead of using a fixed length of sliding window,
we also investigated our system using dynamic slid-
ing window which automatically determines the start
and end of an activity according to the dynamic ac-
tivity threshold. The performance of using dynamic
window is even better, however this method has the
limitation that it requires an activity to be completed
before it can be recognized. The delay of activity
recognition makes it less practical for real-time mon-
itoring, but it shows the potential for improving our
recognition system.
5 CONCLUSIONS
In this paper, we proposed a robust system of daily ac-
tivity monitoring using hierarchical classification by
combining rule-based reasoning and multi-class ma-
chine learning algorithms. Human daily activities can
be naturally represented through hierarchies, such as
motion and motionlessness. Firstly, rule-base reason-
ing was used to separate the sensing data into two
groups: static and dynamic. Static activities are iden-
tified based on the posture of the body which is cal-
culated from 3D-acceleration, and dynamic activities
are classified respectively by using adapted classifica-
tion models. By utilizing the cloud infrastructure, the
system provides high scalability and availability for
data analysis and model management. The data pro-
cessing and classification algorithms are implemented
in the smartphone for real-time activity monitoring
while the cloud-based data analysis and model evalu-
ation are conducted off-line. The experimental results
compare favourably with other work using body sen-
sors (Stefan et al., 2012). Moreover, the performance
of our approach shows a significant improvement in
comparison to the approach using a single smartphone
(Zhang et al., 2010) and the approach built on fixed
machine learning algorithms (Andreu and Angelov,
2013). This shows a lot of promise for using smart-
phones as an alternative to dedicated sensors and us-
ing the cloud-based data analytics framework to pro-
cess machine learning tasks.
A limitation of this study is that the rule-base
reasoning depends on two thresholds to separate the
static and dynamic activities. Although, the chosen
threshold values work well in this study, they may not
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
22

be generally suitable for other cases and for different
sensors. Future work will evaluate new algorithms,
which can separate motion and motionless activities
automatically, without the need for static thresholds.
REFERENCES
Andreu, J. and Angelov, P. (2013). An evolving machine
learning method for human activity recognition sys-
tems. Journal of Ambient Intelligence and Humanized
Computing.
Bao, L. and Intille, S. (2004). Activity recognition from
user-annotated acceleration data. Pervasive Comput-
ing.
Choudhury, T. and Consolvo, S. (2008). The mobile sensing
platform: An embedded activity recognition system.
IEEE2008 Pervasive Computing.
Frederking, R. and Brown, R. (2010). The pangloss-lite ma-
chine translation system. In Proceedings of the Second
Conference of the Association for Machine Transla-
tion in the Americas.
Huerta-Canepa, G. and Lee, D. (2010). A virtual cloud
computing provider for mobile devices. In Proceeding
of the 1st ACM Workshop on Mobile Cloud Computing
& Services: Social Networks and Beyond.
J.R. Kwapisz, G. W. and Moore, S. (2010). Activity recog-
nition using cell phone accelerometers. In Proceed-
ings of the Fourth International Workshop on Knowl-
edge Discovery from Sensor Data.
Khan, A., Lee, Y., Lee, S., and Kim, T. (2010). Human
activity recognition via an accelerometer-enabled-
smartphone using kernel discriminant analysis. In 5th
International Conference on Future Information Tech-
nology.
Lyons, G., Culhane, K., Hilton, D., Grace, P., and Lyons,
D. (2005). A description of an accelerometer-based
mobility monitoring technique. Medical Engineering
& Physics.
Marinelli, E. (2009). Hyrax: cloud computing on mobile
devices using mapreduce. Master’s thesis, Carnegie
Mellon University.
Maurer, U., Samilagic, A., Siewiorek, D., and Deisher, M.
(2006). Activity recognition and monitoring using
multiple sensors on different body positions. In IEEE
Proceedings on the International Workshop on Wear-
able and Implantable Sensor Networks.
Ravi, N., Dandekar, N., Mysore, P., and Littman, M. L.
(2005). Activity recognition from accelerometer data.
In Proceeding of the National Conference on Artificial
Intelligence.
Samsung Inc. (2012). Android smartphone: Sam-
sung galaxy siii. Description Available online at
http://en.wikipedia.org/wiki/Samsung
Galaxy S III.
Singer, E. (2011). The measured life. In Technology Review,
volume 114.
Skelton, D. and McLaughlin, A. (1996). Train functional
ability in old age. Physiotherapy.
Stefan, D., Das, B., Krishnan, N., Thomas, B., and Cook,
D. (2012). Simple and complex activity recognition
through smart phones. In 8th International Confer-
ence on Intelligent Environments.
Tapia, E., Intille, S., Haskell, W., Larson, K., and Friedman,
R. (2007). Real-time recognition of physical activities
and their intensities using wireless accelerometers and
a heart rate monitor. In Proceedings of the 11th IEEE
International Symposium on Wearable Computers &
Physics.
Tapia, E., Intille, S., and Larson, K. (2004). Activity recog-
nition in the home setting using simple and ubiquitous
sensors. In Proceedings of PERVASIVE.
White, D., Wagenaar, R., and Ellis, T. (2001). Monitoring
activity in individuals with parkinson’s disease: A va-
lidity study. Jurnal of Neurological Physical Therapy,
30.
Witten, H., Frank, E., and Hall, A. (2011). Data Min-
ing: Practical machine learning tools and techniques.
Morgan Kaufmann, San Francisco, 3rd edition edi-
tion.
Yuan, B. and Herbert, J. (2011a). Non-intrusive movement
detection in cara pervasive healthcare application. In
The 2011 International Conference on Wireless Net-
works.
Yuan, B. and Herbert, J. (2011b). Web-based real-time re-
mote monitoring for pervasive healthcare. In IEEE In-
ternational Conference on Pervasive Computing and
Communications Workshops (PERCOM Workshops).
Yuan, B. and Herbert, J. (2012). Fuzzy cara - a fuzzy-based
context reasoning system for pervasive healthcare. In
Procedia Computer Science, volume 10.
Zephyr Inc. (2011). Wireless professional heart rate
monitor & physiological monitor with bluetooth.
Description Available online at http://www.zephyr-
technology.com/products/bioharness-3/.
Zhang, S., McCullagh, P., Nugent, C., and Zheng, H.
(2010). Activity monitoring using a smart phone’s ac-
celerometer with hierarchical classification. In 6th In-
ternational Conference on Intelligent Environments.
Smartphone-basedActivityRecognitionusingHybridClassifier-UtilizingCloudInfrastructureforDataAnalysis
23
