
Online Detection of P300 related Target Recognition Processes During a
Demanding Teleoperation Task
Classifier Transfer for the Detection of Missed Targets
Hendrik Woehrle
1
and Elsa Andrea Kirchner
1,2
1
Robotics Innovation Center, German Research Center for Artificial Intelligence (DFKI GmbH)
Robert-Hooke-Str 5, Bremen, Germany
2
Robotics Lab, University of Bremen, Robert Hooke Str. 5, Bremen, Germany
Keywords:
Brain Computer Interfaces, Embedded Brain Reading, P300, Single Trial Detection, Exoskeleton.
Abstract:
The detection of event related potentials and their usage for innovative tasks became a mature research topic
in the last couple of years for brain computer interfaces. However, the typical experimental setups are usually
highly controlled and designed to actively evoke specific brain activity like the P300 event related potential. In
this paper, we show that the detection and passive usage of the P300 related brain activity is possible in highly
uncontrolled and noisy application scenarios where the subjects are performing demanding senso-motor task,
i.e., telemanipulation of a real robotic arm. In the application scenario, the subject wears an exoskeleton to
control a robotic arm, which is presented to him in a virtual scenario. While performing the telemanipulation
task he has to respond to important messages. By online analysis of the subject’s electroencephalogram we
detect P300 related target recognition processes to infer on upcoming response behavior or missing of response
behavior in case a target was not recognized. We show that a classifier that is trained to distinguish between
brain activity evoked by recognized task relevant stimuli and ignored frequent task irrelevant stimuli can be
applied to classify between brain activity evoked by recognized task relevant stimuli and brain activity that is
evoked in case that task relevant stimuli are not recognized.
1 INTRODUCTION
Online-analysis and detection of specific patterns in
electroencephalographic (EEG) data has been used
for various applications, e.g., brain computer inter-
faces (BCIs). Current EEG-based BCIs are using
classification and data dependent signal processing
methods to detect the patterns in the EEG. Therefore,
they highly depend on training data that has to be
used for the calibration of the system before they can
be used to detect the patterns in the application data.
Usually, the training data has to be subject-specific,
i.e., it has to be acquired from the subject in train-
ing sessions directly before the usage of the system.
Further, the recorded data should be clean, i.e., free of
artifacts that might affect the training or detection pro-
cess, as well as task specific, i.e., must consist of data
that is directly related to the patterns that are supposed
to be detected. Therefore, most results are conducted
in highly controlled artificial scenarios, where most of
the possible disturbance sources have been excluded
by experimental design and the subject may even be
fixed in a specific position.
For many applications this is no draw back, espe-
cially if BCIs are applied as active interfaces, i.e., to
control a machine or computer (Farwell and Donchin,
1988; Guger et al., 1999; Wolpaw et al., 2002; Reud-
erink, 2008; Nijholt et al., 2008). If, however, the pat-
terns that should be detected in the brain activity are
no longer actively produced, as it is the case for pas-
sive BCIs (Zander et al., 2010; George and L
´
ecuyer,
2010), then background EEG that is evoked by the
active task may overlay with the relevant brain. Since
the subject is possibly performing different tasks, the
background EEG may differ strongly depending on
the situation and performed active task or action of
the user and thus affects the training data.
For future practical applications of passive ap-
proaches (Zander et al., 2010; George and L
´
ecuyer,
2010; Kirchner et al., 2010; Haufe et al., 2011; Kirch-
ner and Drechsler, 2013), it is required to expose
the systems and subjects to concrete, realistic use-
cases, that are more uncontrolled and performed in
perturbed environments. These conditions likely in-
13
Woehrle H. and Kirchner E..
Online Detection of P300 related Target Recognition Processes During a Demanding Teleoperation Task - Classifier Transfer for the Detection of Missed
Targets.
DOI: 10.5220/0004724600130019
In Proceedings of the International Conference on Physiological Computing Systems (PhyCS-2014), pages 13-19
ISBN: 978-989-758-006-2
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

crease the amount of noise in the training as well as
application data and may therefore impair the detec-
tion accuracy.
A further problem exists, if the amount of training
data is small. It might not be possible to acquire a
large amount of training examples in complex appli-
cation scenarios. This is a general problem, since the
detection accuracy of data-dependent signal process-
ing and classification methods depends on the amount
of available training data. Hence, approaches that can
handle a reduced amount of training examples must
be developed and applied.
One approach is to transfer a classifier between
classes, i.e., to perform a classifier transfer (Pan and
Yang, 2010). It could be shown that classifier transfer
for the detection of patterns in the EEG performs well
for a transfer of classifier between tasks in which the
same event related activity has to be detected (Itur-
rate et al., 2013) or between similar types of event
related potentials (ERPs) like different types of error
potentials (Kim and Kirchner, 2013). In a recent work
we showed that the transfer of classifier is also pos-
sible between classes that ”miss” a pronounced pat-
tern, i.e., the P300 (Kirchner et al., 2013). Hence,
the data processing methods (classifiers and spatial
filters) need not to be trained and tested on examples
that are evoked by the same brain processes, like same
or similar error detection processes, but by brain pro-
cesses that evoke brain pattern, which are similar in
shape and characteristics, i.e., miss a prominent ERP
or pattern of ERPs.
By now, our investigations have been conducted
in controlled experimental setups in an offline fash-
ion. In this paper, we investigate the ability to detect
the P300 ERP in a demanding dual task application
scenario that combines an oddball paradigm with a
second task. We show that the detection of P300 re-
lated target recognition processes and even more im-
portant the missing of target recognition processes can
be performed online while a subject is performing a
demanding and realistic interaction task that occupies
the operators attention. This task consists of the tele-
operation of a real robotic arm through a labyrinth via
a virtual immersion scenario.
The paper makes the following contributions: 1)
we demonstrate that the online, single trial detection
of the P300 potential is possible in an application
scenario that is affected by a high number of noise
sources and artifacts and requires dual task perfor-
mance from the subject (Kirchner and Kim, 2012),
i.e., distracts the subject from the perception of task
relevant stimuli; 2) we show that the few number of
examples of training data of a specific class can be
compensated to a certain degree by classifier transfer.
2 APPLICATION SCENARIO
In the proposed application scenario, we investigate
whether it is possible to reliably detect target recogni-
tion processes as well as the missing of target recog-
nition processes while a subject is performing a de-
manding teleoperation task.
Precisely, the experimental setup was as follows
(see Fig. 1): The subjects were wearing an exoskele-
ton that covered their back and right arm (Folgheraiter
et al., 2012), and a smart glove on their hand that were
used as input devices for the teleoperation task.
In addition, participants were equipped with a
head mounted display (HMD) on which the teleopera-
tion site (including surroundings, labyrinth and robot)
could be seen in 3D. Additionally to the 3D environ-
ment, information from the control system, a camera
picture of the real scene and tools like a gyroscope de-
picting the orientation of the end-effector were at any
time in the operators field of view. Head and hand
movements of the operator were tracked (InterSense,
Billerica, USA) and used to update the HMD.
The subjects had two main tasks that had to be
performed at the same time: a) to control a robotic
arm (teleoperation task) using the exoskeleton, and
b) to respond to specific messages (oddball task).
2.1 The Teleoperation Task
In the teleoperation task, the end-effector of a robotic
arm had to be steered through a labyrinth (see
Fig. 1 C). This task is similar to a wire loop game,
i.e., a certain path has to be followed and touching
the labyrinth had to be avoided. The movements of
the robotic arm were controlled via the exoskeleton
by mapping the state and relative position of the ex-
oskeleton components to a Mitubishi PA-10 robotic
arm (see Fig. 1 A in the lower right corner) via a vir-
tual model (see Fig. 1 A in the upper right corner)
thereof (depending on the concrete type of investiga-
tion, see Sec. 3).
The teleoperation task is difficult and demanding
for the subject, and therefore forces the subject to con-
centrate on it. Further, the subject was requested to
rest from time to time. In each run 24± 8 rest periods
had to be performed (Seeland et al., 2013). During
rest the active exoskeleton kept the operators arm in
position. While this was the case the operator was not
allowed to respond to any warning (infrequent task
relevant stimuli, see below) that were presented to
him in an oddball fashion throughout the run.
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
14
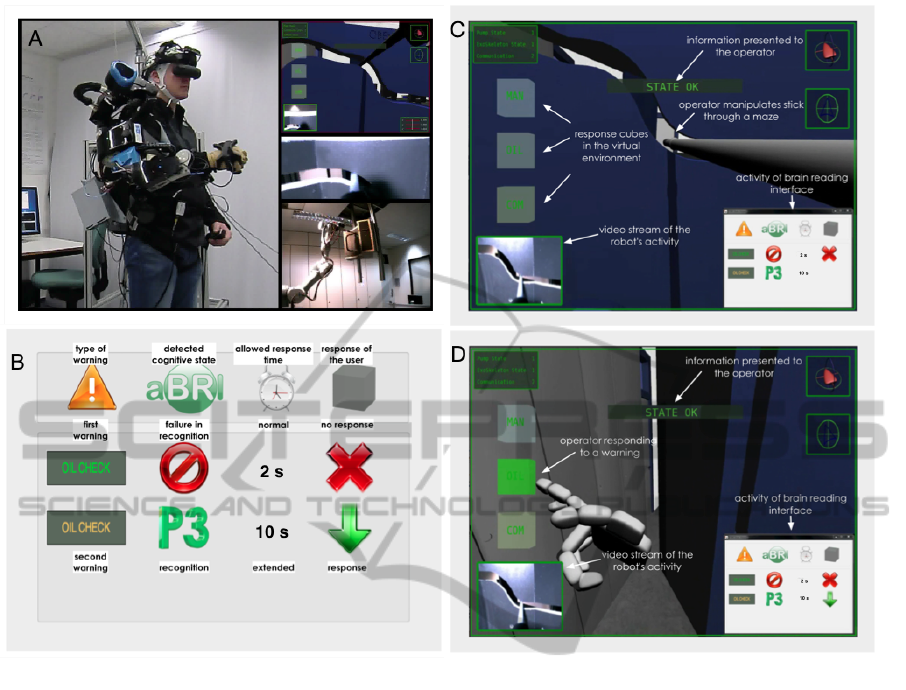
Figure 1: Teleoperation scenario: (A) An operator controls a robot via an exoskeleton and a virtual environment; (B) The
operator monitoring system (OMS) integrates all important informations, it supervises brain states detected by brain reading,
monitors the events in the scenario and responses of the operator on target events; the allowed response time is adapted with
respect to brain state, i.e., whether a warning was recognized or not; (C) The operator is controlling the robot in the virtual
environment through an labyrinth; (D) The operator is interacting with the virtual environment to respond to warnings by
touching one of the response cubes.
2.2 The Oddball Task
In the oddball-task, the subject had to respond to in-
frequent task relevant stimuli (”targets”, see Fig. 2 B)
by touching one of three virtual cubes that were inte-
grated into the virtual scenario as response targets for
answering specific messages in a certain time frame
(see Fig. 1 D). Besides the task relevant messages
also frequent task irrelevant messages (”standards”,
see Fig. 2 A) were presented to the operator but re-
quired no response. Due to the oddball design (Polich,
2007), i.e., the presentation of infrequent task relevant
stimuli mixed with frequent task irrelevant stimuli, it
was expected that P300 related brain processes (Ku-
tas et al., 1977; Salisbury et al., 2001; Kirchner et al.,
2009; Polich, 2007; Kirchner and Kim, 2012) will
be evoked in case of recognized infrequent task rel-
evant messages but not in case of frequent task irrele-
vant messages or task relevant but not recognized, i.e.,
missed, task relevant messages (”missed targets”).
In recorded training data it was determined whether
a target was recognized or not by the occurrence or
missing of a response 10 sec after a target stimulus
was presented.
2.3 The Operator Monitoring System
To support the operator in the scenario, an operator
monitoring system (OMS) (Kirchner and Drechsler,
2013) was included into the setup. The purpose of
the OMS was to monitor the operators cognitive state
and the current state of scenario in order to adjust the
course of events that were shown to the operator to
minimize distraction of the operator and optimize her
or his support by appropriate scheduling of messages.
The allowed response time was 2 sec in case that
OnlineDetectionofP300relatedTargetRecognitionProcessesDuringaDemandingTeleoperationTask-Classifier
TransferfortheDetectionofMissedTargets
15
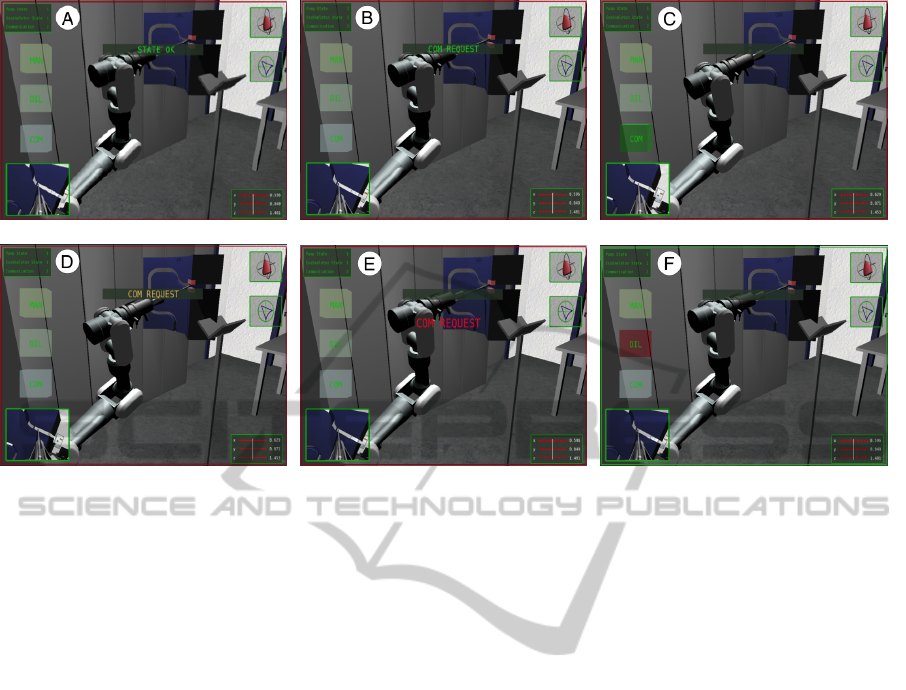
Figure 2: The warnings and responses shown in the virtual immersion teleoperation operator monitoring scenario: (A)
The frequently shown standard marker has the text STATE OK. (B) One of the three possible targets. The possibilities are
MAN ENTERED, OIL TEMPERATURE or COM REQUEST. (C) The operators response must be related to the warning. In
this case, it is the cube with the label COM. In case of a correct response, it is highlighted in green. (D) If the operator did not
respond in time, a repeated and highlighted second target is shown. (E) If the operator did not respond to the second target in
time, a third obtrusive error message is shown. (F) In any case it might happen that the operator touches a cube with a label
that does not correspond to the shown target. In this case, the cube is highlighted in red.
target recognition processes could not be detected af-
ter a target was presented (in case of missed target, see
Fig. 1 B, first warning for ”oil check” was missed) or
to extend the allowed response time to 10 sec in case
target recognition process were detected after a target
was presented and recognized (in case of target, see
Fig. 1 B, second warning for ”oil check” was recog-
nized).
By adapting the allowed response time in this
manner allows to give the operator a longer time for
responses in case he recognized the warning, which
was especially relevant in case that the operator was
in a rest position and was not able to respond. On the
other hand a task relevant message could be repeated
rather quick in case that target recognition processes
could not be detected after a target message was pre-
sented.
To enable this adjustment of the virtual scenario
by the OMS, we used machine learning techniques to
detect the P300 ERP in the subjects EEG. Therefore, a
classifier had to be trained to distinguish examples of
the class target from examples of the class missed tar-
gets online. Since the operators were highly trained in
the scenario they usually miss only a few target mes-
sages, hence the amount of missed target examples
that could be recorded was very low. Thus, we used
EEG activity evoked by irrelevant standard messages
instead of EEG activity evoked by missed target mes-
sages during the training phase of the data processing
to later distinguish between targets and missed tar-
gets.
3 METHODS AND
EXPERIMENTAL
PROCEDURES
The experiments were performed with three male sub-
jects (age 27.33 ± 2.52), with a total of ten recording
sessions.
3.1 Setup and Data Acquisition
The data was acquired with a 64-channel actiCap sys-
tem and two amplifiers (both from Brainproducts,
Munich, Germany) at 5 kHz sampling rate. Four
electrodes (FC5, FC6, FT7, FT8) of the extended
10 − 20 system were omitted to allow the HMD to be
mounted. Thus, 60 channels were used for the record-
ing.
The actual prediction system was active in four of
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
16

ten sessions (online runs) and inactive in six out of ten
sessions. Thus, the overall data consisted of 4 online
and 6 pseudo-online sessions. Pseudo-online sessions
consisted of three, and online sessions of four runs,
with the forth run being the actual online run. Other-
wise they were treated in the same way. A single run
lasted in average about 13.64 ± 3.85 min.
The data acquired in the last run of each session
was used for evaluation of our system, and the other
sessions for training of the system. The pseudo-online
sessions were analyzed offline after the experiments
and are used here to provide a more comprehensive
data basis.
The runs contained between 466 and 1553 (in av-
erage ≈ 865) standards, between 16 and 51 (in aver-
age ≈ 35) targets, and between 1 and 54 (in average
≈ 8) missed targets.
All processing was performed on equally-shaped
windows of data with 1 s of duration, which were cut-
out and labeled according to the occurrence of a stan-
dard, target or missed target.
Between two runs there was a short break of
2 − 3 min, except before the last run in the online ses-
sions where the movement prediction system had to
be trained and thus the break lasted around 10 min.
3.2 Processing Methods
We used our software pySPACE (Signal Processing
And Classification Environment) (Krell et al., 2013a;
Krell et al., 2013b)
1
for online and pseudo-online
data analysis.
All windows were processed independently from
each other. The data was preprocessed in several steps
in order to extract the relevant features for the clas-
sifier. First, the data was standardized channel-wise
by subtracting the mean signal value of the channel
and divided by the standard deviation of the channel
in the corresponding signal window. Next, a decima-
tion with an anti-alias finite impulse response filter
was performed to reduce the sampling rate of the data
from 5 kHz to 25 Hz. This was followed by another
band pass filter with pass band from 0.1 to 4.0 Hz.
Afterwards, the dimension of the data was reduced
further in several steps. First, the xDAWN spatial fil-
ter (Rivet et al., 2009) was applied to reduce the 60
channels data to eight channels. The xDAWN spatial
filter splits the data in noise and signal-plus-noise sub-
spaces to, at the same time, extract meaningful sig-
nal information and reduce the dimension of the data.
The number of eight channels was chosen based on
previous experience with other experimental setups.
1
available at http://pyspace.github.com/pyspace
We used straight lines, a special form of local
polynomial features, as features for the classifier. The
straight lines were fit channel-wise to segments of the
data. Each segment lasted for about 400
´
ms and adja-
cent segments overlapped by about 400
´
ms. The slope
of the lines were used as features. These were stan-
dardized again in the next processing step.
We used a soft-margin support vector ma-
chine (SVM) with a linear kernel for classification,
where the complexity regularization hyperparameter
was optimized using a grid search (tested values:
10
−6
, 10
−5
, . . . , 10
0
) and an internal 5-fold cross val-
idation. The data acquired in the training runs (see
Sec. 3.1) were used for the training and hyperparam-
eter optimization.
3.3 Evaluation
The data was evaluated with respect to the ability of
a classifier to distinguish online and in single trial be-
tween EEG examples that contain patterns related to
target recognition processes (that evoke a P300) and
EEG examples that miss these patterns.
We expect that both, missed targets and standards
would not evoke such patterns while targets do. Since
enough training data was available we first analyzed
how well a classifier trained on standard and tar-
get examples performs to distinguish between both
classes (TS case).
Afterwards, we used a classifier that was trained
on standard and target examples to distinguish be-
tween target and missed target examples (TM case)
which was the relevant application case (see Sec. 2).
To compare both results allows us to estimate how
well classifier transfer performs in a demanding ap-
plication teleoperation scenario.
4 RESULTS AND DISCUSSION
For the evaluation of the classification performance
we use the Balanced Accuracy (BA), which is given
by
1
2
T PR +
1
2
T NR, where T PR and T NR are the true
positive and true negative rate, respectively. Accord-
ingly, a BA score of 0.5 corresponds to random guess-
ing, while a BA score of 1.0 would correspond to a
perfect classifier. The BA is not affected by an unbal-
anced number of examples in each class, as it is the
case here.
The obtained classification performance (as BA)
for the different runs and sessions is shown in Table
1. The results correspond to the single trial detection
of the P300 ERP.
OnlineDetectionofP300relatedTargetRecognitionProcessesDuringaDemandingTeleoperationTask-Classifier
TransferfortheDetectionofMissedTargets
17

Table 1: Classification performance for target vs. standard (TS case) and target vs. missed targets (TM case). The first 6
columns on the left contain the results for the pseudo-online sessions, the 4 columns on the right contain the results for the
online sessions.
Evaluation S1 R1 S1 R2 S2 R1 S2 R2 S3 R1 S3 R2 S1 R
ol
1 S1 R
ol
2 S1 R
ol
3 S2 R
ol
1
TS 0.84 0.97 0.96 0.95 0.88 0.86 0.91 0.88 0.85 0.93
TM 0.64 0.98 0.86 0.72 0.83 0.78 0.81 0.9 0.80 0.94
The average classification performance (as BA)
in the TM case is 0.827 ± 0.103, which is slightly
smaller as in the TS case (0.902 ± 0.048). It can be
observed that in 8 of 10 sessions the difference of the
BA is 0.1 or less, and in 5 of 10 sessions it is even
0.05 or less.
This shows that the achieved classification perfor-
mance of our system works well for the P300 single
trial detection for both the TM and TS cases despite
the disturbance-prone setup. In addition, there is no
remarkable difference between the TM and TS cases.
Furthermore, the difference between the BA score
in the pseudo-online and online sessions is negligible
(average classification performance TS case pseudo-
online: ≈ 0.9089 ± 0.057, online: ≈ 0.893 ± 0.037;
TM case pseudo-online: ≈ 0.803 ± 0.110, online ≈
0.864 ± 0.070).
5 CONCLUSIONS AND FUTURE
WORK
The presented results show that it is possible to de-
tect the P300 in a complex and noisy application sce-
nario where the operator of a robot has to perform a
dual task, i.e., to teleoperate a robot and to respond to
warnings. Furthermore, our results show that a clas-
sifier can be transferred between classes in case that
both classes, here standard and missed targets, that
miss a prominent pattern in the EEG signal, here the
P300 ERP. This transfer works for most cases very
well without a decrease of classification performance.
However, in some cases the performance does de-
crease by a larger amount. Causes for this have to
be investigated.
In future, we plan to improve the signal process-
ing and pattern recognition methodology further to re-
duce the amount of required training data and to com-
pensate for changes of the user itself, like fatigue, by
applying online adaptation methods. In addition, we
plan to use and evaluate our system in even more ad-
vanced and complex application scenarios, e.g., the
supervision of operators that control several robots si-
multaneously.
ACKNOWLEDGEMENTS
This work was funded by the Federal Ministry of Eco-
nomics and Technology (BMWi, grant no. 50 RA
1012 and 50 RA 1011).
REFERENCES
Farwell, L. A. and Donchin, E. (1988). Talking off the
top of your head: toward a mental prosthesis utiliz-
ing event-related brain potentials. Electroencephalogr.
Clin. Neurophysiol., 70(6):510–23.
Folgheraiter, M., Jordan, M., Straube, S., Seeland, A., Kim,
S.-K., and Kirchner, E. A. (2012). Measuring the im-
provement of the interaction comfort of a wearable ex-
oskeleton. International Journal of Social Robotics,
4(3):285–302.
George, L. and L
´
ecuyer, A. (2010). An overview of research
on ”passive” brain-computer interfaces for implicit
human-computer interaction. In International Con-
ference on Applied Bionics and Biomechanics ICABB
2010 - Workshop W1 ”Brain-Computer Interfacing
and Virtual Reality”, Venice, Italy.
Guger, C., Harkam, W., Hertnaes, C., and Pfurtscheller, G.
(1999). Prosthetic control by an EEG-based brain-
computer interface (BCI). 5th European AAATE Con-
ference.
Haufe, S., Treder, M. S., Gugler, M. F., Sagebaum, M., Cu-
rio, G., and Blankertz, B. (2011). EEG potentials pre-
dict upcoming emergency brakings during simulated
driving. Journal of Neural Engineering, 8(5):056001.
Iturrate, I., Montesano, L., and Minguez, J. (2013). Task-
dependent signal variations in EEG error-related po-
tentials for brain-computer interfaces. Journal of Neu-
ral Engineering, 10:026024.
Kim, S. K. and Kirchner, E. A. (2013). Classifier transfer-
ability in the detection of error related potentials from
observation to interaction. In Proceedings of the IEEE
International Conference on Systems, Man, and Cy-
bernetics, SMC 2013, Manchester, UK, October 13-
16, 2013.
Kirchner, E. A. and Drechsler, R. (2013). A Formal Model
for Embedded Brain Reading. volume 40, pages 530–
540. Emerald Group Publishing Limited.
Kirchner, E. A. and Kim, S. K. (2012). EEG in Dual-Task
Human-Machine Interaction: Target Recognition and
Prospective Memory. In Proceedings of the 18th An-
nual Meeting of the Organization for Human Brain
Mapping.
PhyCS2014-InternationalConferenceonPhysiologicalComputingSystems
18

Kirchner, E. A., Kim, S. K., Straube, S., Seeland, A.,
W
¨
ohrle, H., Krell, M. M., Tabie, M., and Fahle, M.
(accepted 2013). On the applicability of brain read-
ing for self-controlled, predictive human-machine in-
terfaces in robotics. PLoS ONE.
Kirchner, E. A., Metzen, J. H., Duchrow, T., Kim, S. K.,
and Kirchner, F. (2009). Assisting Telemanipulation
Operators via Real-Time Brain Reading. In Lohweg,
V. and Niggemann, O., editors, Proc. Mach. Learn-
ing in Real-time Applicat. Workshop 2009, Lemgoer
Schriftenreihe zur industriellen Informationstechnik,
Paderborn, Germany.
Kirchner, E. A., W
¨
ohrle, H., Bergatt, C., Kim, S.-K., Met-
zen, J. H., Feess, D., and Kirchner, F. (2010). Towards
operator monitoring via brain reading – an EEG-based
approach for space applications. In Proc. 10th Int.
Symp. Artificial Intelligence, Robotics and Automa-
tion in Space, pages 448–455, Sapporo.
Krell, M. M., Straube, S., Seeland, A., W
¨
ohrle, H., Teiwes,
J., Metzen, J. H., Kirchner, E. A., and Kirchner, F.
(2013a). pySPACE. https://github.com/pyspace.
Krell, M. M., Straube, S., Seeland, A., W
¨
ohrle, H., Tei-
wes, J., Metzen, J. H., Kirchner, E. A., and Kirchner,
F. (submitted 2013b). pySPACE a signal processing
and classification environment in Python. Frontiers in
Neuroinformatics.
Kutas, M., McCarthy, G., and Donchin, E. (1977). Aug-
menting mental chronometry: the P300 as a measure
of stimulus evaluation time. Science, 197(4305):792–
5.
Nijholt, A., Tan, D., Allison, B. Z., Del R Milan, J., and
Graimann, B. (2008). Brain-computer interfaces for
HCI and games, pages 3925–3928. ACM.
Pan, S. J. and Yang, Q. (2010). A Survey on Transfer Learn-
ing. IEEE Transactions on Knowledge and Data En-
gineering, 22(10):1345–1359.
Polich, J. (2007). Updating P300: an integrative theory of
P3a and P3b. Clin Neurophysiol, 118(10):2128–48.
Reuderink, B. (2008). Games and Brain-Computer Inter-
faces: The State of the Art. WP2 BrainGain Deliver-
able HMI University of Twente September 2008, pages
1–11.
Rivet, B., Souloumiac, A., Attina, V., and Gibert, G. (2009).
xDAWN algorithm to enhance evoked potentials: ap-
plication to brain-computer interface. IEEE Transac-
tions on Biomedical Engineering, 56(8):2035–2043.
Salisbury, D., Rutherford, B., Shenton, M., and McCar-
ley, R. (2001). Button-pressing Affects P300 Am-
plitude and Scalp Topography. Clin Neurophysiol,
112(9):1676–1684.
Seeland, A., W
¨
ohrle, H., Straube, S., and Kirchner, E. A.
(2013). Online movement prediction in a robotic
application scenario. In Neural Engineering (NER),
2013 6th International IEEE/EMBS Conference on.
Wolpaw, J. R., Birbaumer, N., McFarland, D. J.,
Pfurtscheller, G., and Vaughan, T. M. (2002). Brain-
computer interfaces for communication and control.
Clin. Neurophysiol., 113(6):767–91.
Zander, T. O., Kothe, C., Jatzev, S., and Gaertner, M.
(2010). Enhancing human-computer interaction with
input from active and passive brain-computer inter-
faces. Brain-Computer Interfaces, pages 181–199.
OnlineDetectionofP300relatedTargetRecognitionProcessesDuringaDemandingTeleoperationTask-Classifier
TransferfortheDetectionofMissedTargets
19
