
Performance Evaluation of Feature Point Descriptors
in the Infrared Domain
Pablo Ricaurte
1
, Carmen Chil´an
1
, Cristhian A. Aguilera-Carrasco
2
, Boris X. Vintimilla
1
and Angel D. Sappa
1,2
1
CIDIS-FIEC, Escuela Superior Polit´ecnica del Litoral (ESPOL),
Campus Gustavo Galindo, Km 30.5 v´ıa Perimetral, P.O. Box 09-01-5863, Guayaquil, Ecuador
2
Computer Vision Center, Universitat Aut`onoma de Barcelona, 08193 Bellaterra, Barcelona, Spain
Keywords:
Infrared Imaging, Feature Point Descriptors.
Abstract:
This paper presents a comparative evaluation of classical feature point descriptors when they are used in the
long-wave infrared spectral band. Robustness to changes in rotation, scaling, blur, and additive noise are
evaluated using a state of the art framework. Statistical results using an outdoor image data set are presented
together with a discussion about the differences with respect to the results obtained when images from the
visible spectrum are considered.
1 INTRODUCTION
In general, computer vision applications are based on
the use of cameras that work in the visible spectrum.
Recent advances in infrared imaging, as well as the
reduction on the prices of these cameras, have opened
new opportunities to develop novel solutions working
in infrared spectral band or in the cross-spectral do-
main between infrared and visible images (e.g., (Bar-
rera et al., 2013), (Aguilera et al., 2012), (Barrera
et al., 2012) and (Felic´ısimo and Cuartero, 2006)).
The spectral band of infrared imaging goes from
0.75µm to 15 µm, which is split up into the following
categories: Near-Infrared (NIR: 0.751.4 µm), Short-
Wave Infrared (SWIR: 1.43 µm), Mid-Wave Infrared
(MWIR: 38 µm) or Long-Wave Infrared (LWIR: 815
µm). Images from each one of these categories have
a particular advantage for a given application; for in-
stance NIR images are generally used in gaze detec-
tion and eye tracking applications (Coyleet al., 2004);
SWIR spectral band has shown its usage in heavy fog
environments (Hansen and Malchow, 2008); MWIR
is generally used to detect temperatures somehow
above body temperature in military applications; fi-
nally, LWIR images have been used in video surveil-
lance and driver assistance (Krotosky and Trivedi,
2007). The current work is focussed on the LWIR do-
main, which corresponds to the farthest infrared spec-
tral band from the visible spectrum.
Following the evolution of visible spectrum based
computer vision, in the infrared imaging domain top-
ics such as image registration, pattern recognition or
stereo vision, are being addressed. As a first attempt,
classical tools from the visible spectrum are just used
or little adapted to the new domain. One of these
tools is the feature point description, which has been a
very active research topic during the last decade in the
computer vision community. Due to the large amount
of contributions on this topic there were several works
on the literature evaluating and comparing their per-
formance in the visible spectrum case (e.g., (Miksik
and Mikolajczyk, 2012), (Mikolajczyk and Schmid,
2005), (Bauer et al., 2007) and (Schmid et al., 2000)).
Similarly to in the visible spectrum case, the cur-
rent work proposes to study the performance of fea-
ture point descriptors when they are considered in
the infrared domain. Since there is a large amount
of algorithms in the literature, we decided to select
the most representative and recent ones. Our study
includes: SIFT (Lowe, 1999), SURF (Bay et al.,
2006), ORB (Rublee et al., 2011), BRISK (Leuteneg-
ger et al., 2011), BRIEF (Calonder et al., 2012) and
FREAK (Alahi et al., 2012). The study is motivated
by the fact that although the appearance of LWIR im-
ages is similar to the ones from the visible spectrum
their nature is different, hence we consider that con-
clusions from visible spectrum cannot be directly ex-
tended to the infrared domain.
545
Ricaurte P., Chilán C., Aguilera-Carrasco C., Vintimilla B. and Sappa A..
Performance Evaluation of Feature Point Descriptors in the Infrared Domain.
DOI: 10.5220/0004725305450550
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 545-550
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
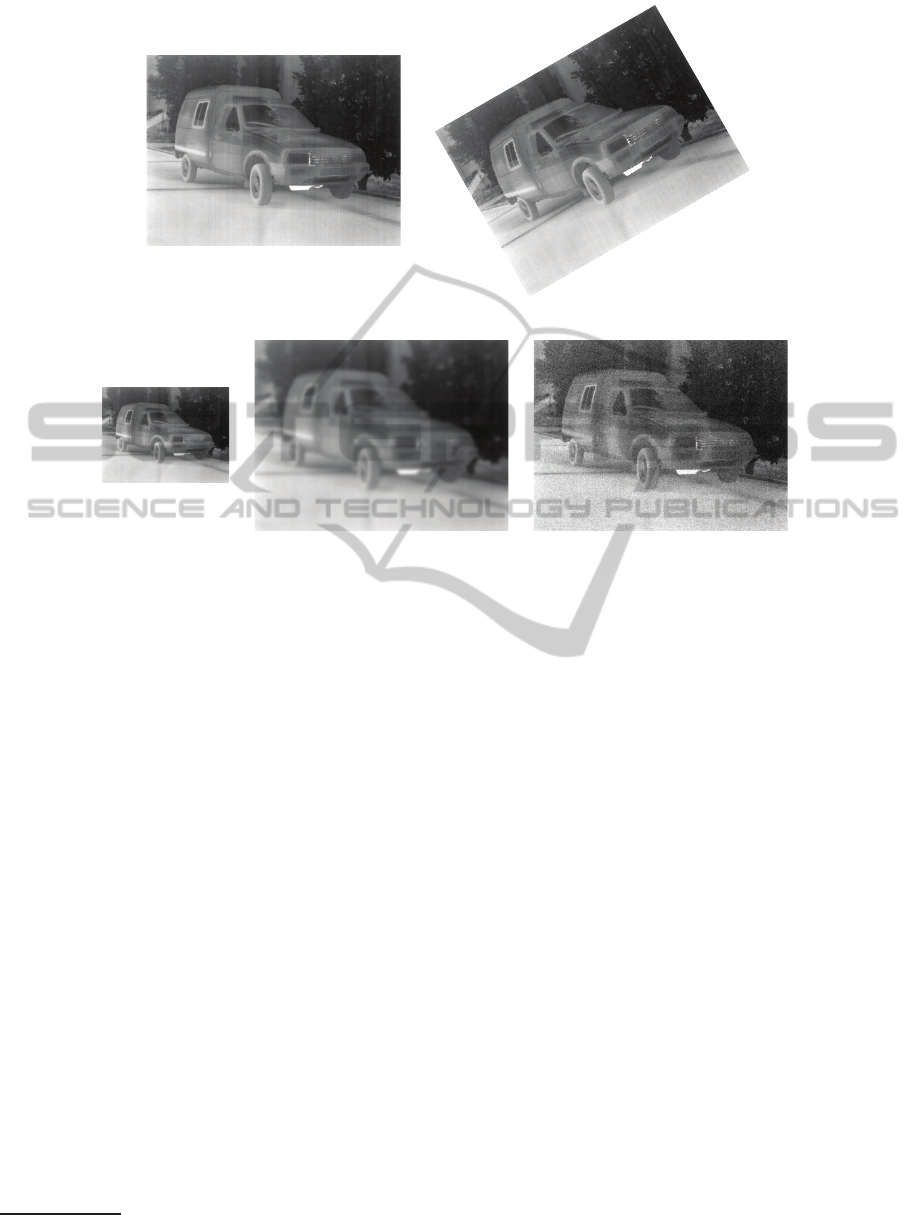
(c) (d) (e)
(a) (b)
Figure 1: A LWIR image from the evaluation dataset together with some illustrations of the applied transformations: (a)
original image; (b) rotation; (c) scale; (d) blur; (e) noise.
The manuscript is organized as follow. The eval-
uation methodology used for the comparison is pre-
sented in Section 2. Then, the data set and experi-
mental results are detailed in Section 3. Finally, con-
clusions and discussions are given in Section 4.
2 EVALUATION FRAMEWORK
This section summarizes the framework used to eval-
uate the performance of the different approaches. It
aims at finding the best descriptor for feature point
correspondence when common image transforma-
tions are considered: rotation in the image plane,
changes in the image size, blur and presence of noise
in the images. In order to take into account all these
possible changes, the given images are modified, then
different descriptors are applied. The used framework
has been proposed by Khvedchenia
1
for evaluating
the performance of feature descriptors in the visible
spectrum case. The algorithms are evaluated consid-
ering as a ground truth those points in the given im-
age. A brute force strategy is used for finding the
matchings, together with a L2 norm or Hamming dis-
1
http://computer-vision-talks.com/2011/08/
feature-descriptor-comparison-report/
tance, as detailed in Table 1. The percentage of cor-
rect matches between the ground truth image and the
modified one is used as a criterion for the evaluation.
The transformations applied to the given images are
detailed below. Figure 1 shows an illustration of a
given LWIR image together with some of the images
resulting after applying the different transformations.
• Rotation: the study consists in evaluating the sen-
sibility to rotations of the image. The rotations
are in the image plane spanning the 360 degrees,
a new image is obtained every 10 degrees.
• Scale: the size of the given image is changed and
the repeatability of a given descriptor is evaluated.
The original image is scaled in between 0.2 to 2
times its size with a step of 0.1 per test. Pixels of
scaled images are obtained through a linear inter-
polation.
• Blur: the robustness with respect to blur is eval-
uated. It consists of a Gaussian filter iteratively
applied over the given image. At each iteration
the size of the kernel filter (K × K) used to blur
the image is update as follows: K = 2t + 1, where
t = {1, 2, ..., 9}.
• Noise: this final study consists in adding noise to
the original image. This process is implemented
by adding to the original image a personalized
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
546
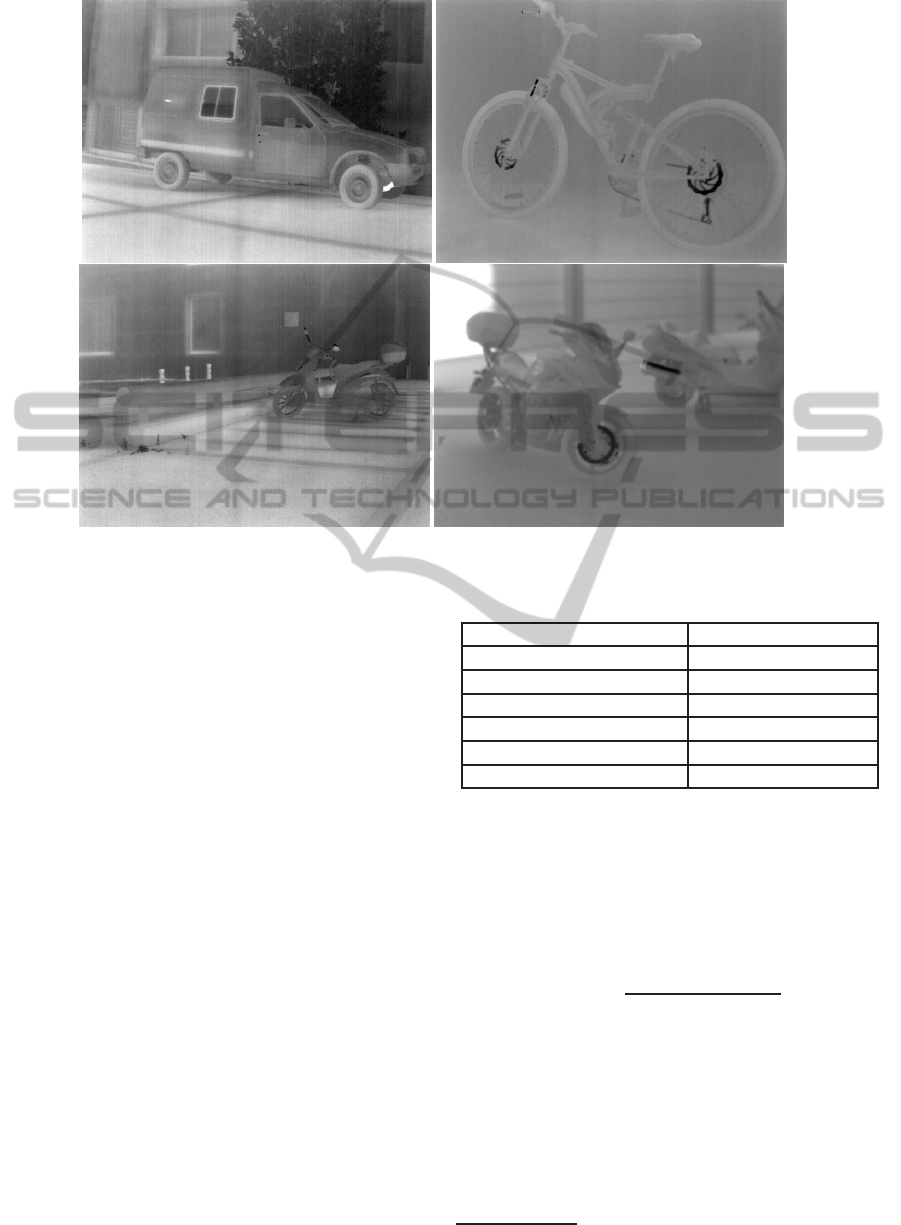
Figure 2: Illustration of infrared images considered in the evaluation framework.
image. The value of the pixels of the person-
alized image are randomly obtained following a
uniform distribution with µ = 0 and σ = t, where
t = {0, 10, 20, ..., 100}.
In the original framework proposed by Khvedche-
nia, lighting changes were also considered, since that
study was intended for images in the visible spec-
trum. In the current work, since it aims at studying
the LWIR spectrum, changes in the image intensity
values won’t follow the same behavior all through the
image (like lighting changes in the visible spectrum).
Intensity values in LWIR images are related with the
material of the objects in the scene. In summary, a
study similar to the lighting changes is not considered
in the current work.
3 EXPERIMENTAL RESULTS
A set of 20 LWIR images has been considered with
the evaluation framework presented above. For each
one of the LWIR images the corresponding image
from the visible spectrum is also provided. These
visible spectrum images are used to compare the re-
sults obtained in the LWIR domain. Figure 2 presents
some of the LWIR images contained in our dataset; it
is publicly available for further research through our
Table 1: Algorithms evaluated in the study.
Descriptor Alg. Matcher norm type
SIFT L2 Norm
SURF L2 Norm
ORB Hamming Distance
BRISK Hamming Distance
BRIEF (SURF detector) Hamming Distance
FREAK (SURF detector) Hamming Distance
Web site
2
. For each algorithm and transformation the
number of correct matches out of the total number
of feature points described in the original image (the
number of correspondences used as ground truth) is
considered for the evaluation, similar to (Mikolajczyk
and Schmid, 2005):
recall =
#correct matches
#correspondences
. (1)
The algorithms evaluated in the current work are
presented in Table 1. In the cases of BRIEF and
FREAK the SURF algorithm is used as a detector. In
ORB, BRISK, BRIEF and FREAK the Hamming dis-
tance is used, instead of L2 norm, for speeding up the
matching. For each transformation (Section 2) a set of
images is obtained; for instance, in the rotation case
36 images are evaluated.
2
http://www.cvc.uab.es/adas/projects/simeve/
PerformanceEvaluationofFeaturePointDescriptorsintheInfraredDomain
547

0 50 100 150 200 250 300 350 400
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Angle (in degrees)
recall
Rotation
BRISK
ORB
SIFT
BRIEF
FREAK
SURF
Figure 3: Rotation case study: average results from the evaluation data set.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Scale Factor
recall
Scale
BRISK
ORB
SIFT
BRIEF
FREAK
SURF
Figure 4: Scale case study: average results from the evaluation data set.
Figure 3 depicts results obtained when the given
image is rotated 360 degrees. It can be observed
that the most robust algorithm is SIFT, which is the
same conclusion obtained when images from the vis-
ible spectrum are considered. On the other hand, the
BRIEF algorithm (using SURF as a detector) is the
most sensible to rotations; actually, its performance
drop to zero just after applying ±25 degrees to the
given image. This behavior was also observed in the
visible spectrum. Regarding the algorithms in be-
tween, a slightly better performance was appreciated
in the LWIR case. In summary, the ranking from the
best to the worst is as follow: SIFT, ORB, FREAK,
SURF, BRISK, BRIEF (the same ranking was ob-
served in both spectrums).
In the scale study, although similar results were
obtained in both spectrums, the algorithms’ perfor-
mance was better in the infrared case, in particular
in the case of BRISK, which being the worst algo-
rithm in both cases it has a better performance in
the LWIR case. The ranking of algorithms’ perfor-
mance is as follow (from the best to the worst): SIFT,
FREAK, SURF, ORB, BRIEF and BRISK. Figure 4
shows these results.
Figure 5 presents the study of robustness of the
different algorithms when the given images are de-
graded using a Gaussian filter of increasing size. Sim-
ilarly to in the previous case all the algorithms have a
better performance in the LWIR case than in the vis-
ible spectrum. In this case the BRIEF algorithm is
the most robust one, the other algorithms are sorted
as follow: FREAK, SURF, ORB, SIFT and BRISK;
being BRISK the algorithm less robust to noise.
Finally, Fig 6 shows the curves obtained when ad-
ditive noise is considered. In this case, differently
than in the previous studies, the algorithm has a bet-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
548

3 5 7 9 11 13 15 17 19
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Gaussian Blur Kernel Size
recall
Blur
BRISK
ORB
SIFT
BRIEF
FREAK
SURF
Figure 5: Blur case study: average results from the evaluation data set.
0 10 20 30 40 50 60 70 80 90 100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Standard Deviation
recall
Aditive Noise
BRISK
ORB
SIFT
BRIEF
FREAK
SURF
Figure 6: Noise case study: average results from the evaluation data set.
ter performance in the visible spectrum. Additionally,
the performance of SIFT in the LWIR spectrum is not
as bad as in the visible spectrum. The ranking of al-
gorithms’ performance is as follow (from the best to
the worst): BRIEF, FREAK, ORB, SIFT, SURF and
BRISK.
4 CONCLUSIONS
This work presents an empirical evaluation of the per-
formance of the state of the art descriptors when they
are used in the LWIR domain. The main objective
was to study whether conclusions obtained in the vis-
ible spectrum are also valid for the LWIR spectrum.
Although results are similar to those obtained in the
visible spectrum it can be appreciated that the per-
formance of the algorithm BRIEF (using SURF as a
detector) is better in LWIR spectrum when compared
with its performance in the visible spectrum. The rel-
ative ranking in between algorithms keep the same in
both spectral bands.
ACKNOWLEDGEMENTS
This work has been partially supported by the Spanish
Government under Research Project TIN2011-25606
and PROMETEO Project of the ”Secretar´ıa Nacional
de Educaci´on Superior, Ciencia, Tecnolog´ıa e Inno-
vaci´on de la Rep´ublica del Ecuador”. Cristhian A.
Aguilera-Carrasco was supported by a grant from
”Universitat Aut`onoma de Barcelona”. The authors
would like to thanks to Mr. Khvedchenia Ievgen for
providing them with the evaluation framework.
PerformanceEvaluationofFeaturePointDescriptorsintheInfraredDomain
549

REFERENCES
Aguilera, C., Barrera, F., Lumbreras, F., Sappa, A., and
Toledo, R. (2012). Multispectral image feature points.
Sensors, 12(9):12661–12672.
Alahi, A., Ortiz, R., and Vandergheynst, P. (2012). FREAK:
Fast retina keypoint. In IEEE Conference on Com-
puter Vision and Pattern Recognition, Providence, RI,
USA, June 16-21, pages 510–517.
Barrera, F., Lumbreras, F., and Sappa, A. (2012). Multi-
modal stereo vision system: 3d data extraction and al-
gorithm evaluation. IEEE Journal of Selected Topics
in Signal Processing, 6(5):437–446.
Barrera, F., Lumbreras, F., and Sappa, A. (2013). Mul-
tispectral piecewise planar stereo using manhattan-
world assumption. Pattern Recognition Letters,
34(1):52–61.
Bauer, J., Snderhauf, N., and Protzel, P. (2007). Compar-
ing several implementations of two recently published
feature detectors. In Proceedings of the International
Conference on Intelligent and Autonomous Systems,
Toulouse, France.
Bay, H., Tuytelaars, T., and Gool, L. J. V. (2006). SURF:
Speeded Up Robust Features. In Proceedings of the
9th European Conference on Computer Vision, Graz,
Austria, May 7-13, pages 404–417.
Calonder, M., Lepetit, V.,
¨
Ozuysal, M., Trzcinski, T.,
Strecha, C., and Fua, P. (2012). BRIEF: Computing
a local binary descriptor very fast. IEEE Trans. Pat-
tern Anal. Mach. Intell., 34(7):1281–1298.
Coyle, S., Ward, T., Markham, C., and McDarby, G. (2004).
On the suitability of near-infrared (NIR) systems for
next-generation braincomputer interfaces. Physiolog-
ical Measurement, 25(4).
Felic´ısimo, A. and Cuartero, A. (2006). Method-
ological proposal for multispectral stereo matching.
IEEE Trans. on Geoscience and Remote Sensing,
44(9):2534–2538.
Hansen, M. P. and Malchow, D. S. (2008). Overview of swir
detectors, cameras, and applications. In Proceedings
of the SPIE 6939, Thermosense, Orlando, FL, USA,
March 16.
Krotosky, S. and Trivedi, M. (2007). On color-, infrared-
, and multimodal-stereo approaches to pedestrian de-
tection. IEEE Transactions on Intelligent Transporta-
tion Systems, 8:619–629.
Leutenegger, S., Chli, M., and Siegwart, R. (2011). BRISK:
Binary Robust Invariant Scalable Keypoints. pages
2548–2555.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the IEEE In-
ternational Conference on Computer Vision, Kerkyra,
Greece, September 20-27, pages 1150–1157.
Mikolajczyk, K. and Schmid, C. (2005). A performance
evaluation of local descriptors. IEEE Trans. Pattern
Anal. Mach. Intell., 27(10):1615–1630.
Miksik, O. and Mikolajczyk, K. (2012). Evaluation of lo-
cal detectors and descriptors for fast feature matching.
In Proceedings of the 21st International Conference
on Pattern Recognition, ICPR 2012, Tsukuba, Japan,
November 11-15, pages 2681–2684.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G. R.
(2011). ORB: An efficient alternative to SIFT or
SURF. In IEEE International Conference on Com-
puter Vision, Barcelona, Spain, November 6-13, pages
2564–2571.
Schmid, C., Mohr, R., and Bauckhage, C. (2000). Evalua-
tion of interest point detectors. International Journal
of Computer Vision, 37(2):151–172.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
550
