
Improving Visual Tracking Robustness in Cluttered and Occluded
Environments using Particle Filter with Hybrid Resampling
Flavio de Barros Vidal, Diego A. L. Cordoba, Alexandre Zaghetto and Carla M. C. C. Koike
Department of Computer Science, University of Brasilia, Brasilia, Distrito Federal, 70.910-900, Brazil
Keywords:
Visual Tracking, Particle Filter, Hybrid Resampling.
Abstract:
Occlusions and cluttered environments represent real challenges for visual tracking methods. In order to in-
crease robustness for such situations, we present, in this article, a method for visual tracking using a Particle
Filter with Hybrid Resampling. Our approach consists of using a particle filter to estimate the state of the
tracked object, and both particles’ inertia and update information are used in the resampling stage. The pro-
posed method is tested using a public benchmark and the results are compared with other tracking algorithms.
The results show that our approach performs better in cluttered environments, as well as in situations with
total or partial occlusions.
1 INTRODUCTION
Visual tracking is an important technique used
in many applications (for example mobile, aerial
and manipulator robots) working in structured
and unstructured environments(Siradjuddin et al.,
2013)(Bakhshande and Taghirad, 2013). The process
of combining visual tracking and others techniques is
widely known and used. The design of systems based
on a visual tracking technique presents challenging
problems such as in situations with total or partial oc-
clusions and cluttered environments.
The aim of visual tracking is to detect a target and
to determine its position and trajectory in a video se-
quence. Applications in this field are becoming very
common (Gao et al., 2012) (Ge et al., 2012) (Leibe
et al., 2008), along with the evolution and lower costs
of camera and computer technologies.
Visual tracking can be seen as a correspondence
subproblem in vision-based motion analysis. The
correspondence problem deals with determining the
matching between elements of two frames in a se-
quence. It can, then, be applied for tracking purposes
by determining the movement of an entire target re-
gion over a long sequence of images. Due to the
small spatial and temporal differences between con-
secutive frames, the correspondence problem can also
be stated as the problem of estimating the apparent
motion of the image brightness pattern.
The solution of the correspondence problem can
roughly follow two strategies: differential methods
and window-matching methods. Differential tech-
niques are based on the spatial and temporal varia-
tions of the whole image brightness, generating then
the optical flow. Methodologies for motion detec-
tion based on differential techniques can be modi-
fied to perform object tracking in a sequence of im-
ages (Vidal and Alcalde, 2005). However, these tech-
niques demand numerical calculation of derivatives
that could be impracticable in circumstances where
there is a high level of noise, reduced number of
frames or the effect of aliasing in the image acqui-
sition process. Window-matching techniques (Anan-
dan, 1989) are based on the assessment of the degree
of similarity among regions in sequential images, so
that an object may be recognized and its position in-
ferred in subsequent frames. Window-matching tech-
niques can be applied to image tracking and to other
issues in computing vision.
Occlusions and cluttered environments represent
real challenges for visual tracking methods, because
in these conditions the target can no longer be ob-
served. Since obstacles may be treated as non-
linearities, non-linear algorithms such as particle fil-
ter are proposed to overcome occlusions and clut-
tered environments in tracking. A Particle filter is one
of many techniques that perform Recursive Bayesian
Estimation, and it estimates recursively the posterior
density function over a certain state space. Many re-
cent approaches using Particle Filters for visual track-
ing can be found in those papers of (Romo-Morales
et al., 2013), (Limprasert et al., 2013), (Mohan and
605
de Barros Vidal F., A. L. Cordoba D., Zaghetto A. and M. C. C. Koike C..
Improving Visual Tracking Robustness in Cluttered and Occluded Environments using Particle Filter with Hybrid Resampling.
DOI: 10.5220/0004731006050612
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 605-612
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Wilscy, 2013), (Zhou et al., 2014), (Maier-Hein et al.,
2013), (Rui et al., 2013) and many others in a exten-
sive available literature.
In the case of visual tracking, the density function
is a representation of the probability of the target po-
sition in a frame of an image sequence. The main idea
of Particle Filters is to represent the a posteriori den-
sity function by a set of random samples with associ-
ated weights. These associated weights are obtained
by a function that reaches its maximum in those sam-
ples near the object distinguished features. A major
concern regarding Particle Filters is related to the sit-
uation where many of its samples drift to low poste-
rior probability regions. The Resampling stage aims
to move the set of particles towards regions in state
space with higher posterior probability.
In this paper, we propose the use of a particle filter
in association with an Hybrid Resampling strategy as
a method for robust and accurate response on differ-
ent tracking scenarios. In Section 2 the Particle Filter
methods are introduced and discussed and Section 3
presents the hybrid resampling strategy. In Section 4
the proposed algorithm is applied to two types of vi-
sual tracking situations and the results are commented
and discussed.
2 THE PARTICLE FILTER
Particle filter is a powerful and flexible estimation
technique for nonlinear applications. It is based
on simulation and it is usually applied to estimate
Bayesian Models where all variables are connected in
a Markov Chain (Doucet et al., 2001). The main idea
is to obtain an approximate representation of the pos-
terior probability density function using a subsequent
set of random samples with associated weights.
Let
X
i
0:k
,w
i
k
N
s
i=1
be a measure that describes a
random posterior probability density function (PDF)
p(X
0:k
|Y
1:k
), where (X
i
0:k
,i = 0,...,N
s
) is a set of sup-
port points with associated weights (w
i
k
,i = 0, ..., N
s
).
The state vector X
0:k
= (X
j
, j = 0, ..., k) is the set of
all states at time k. The measure vector Y
1:k
= (Y
j
, j =
1,...,k) is the set of all measures at time k. The
weights are normalized by
∑
N
s
i=1
w
i
= 1 and obtained
by Eq. 1,
p(X
0:k
|Y
1:k
) ≈
N
s
∑
i=1
w
i
k
δ(X
0:k
−X
i
0:k
). (1)
The theory of Importance Sampling (Doucet et al.,
2000) ensures that we can build an estimator if each
X
i
j
and sample weights are calculated according to
Eqs. 2 and 3,
X
i
j
∝ q(X
i
k
|X
i
k−1
,Y
i
k
), (2)
w
i
k
∝ w
i
k−1
p(Y
k
|X
i
k
)p(X
k
|X
i
k−1
)
q(X
i
k
|X
i
k−1
,Y
i
k
)
. (3)
The distribution q(X
i
k
|X
i
k−1
,Y
i
k
) is called impor-
tance density and a good choice for this distribution
can be defined as q(X
i
k
|X
i
k−1
,Y
i
k
) = p(X
k
|X
i
k−1
). Also,
Equation 3 can be reduced to:
w
i
k
∝ w
i
k−1
p(Y
k
|X
i
k
). (4)
A common problem in this algorithm is the degen-
eration effect, as explained in (Arulampalam et al.,
2002), and in order to solve it, we can use an effective
sample size (
ˆ
N
e f f
) defined by,
ˆ
N
e f f
=
1
∑
N
s
i=1
w
i
k
. (5)
2.1 Resampling
The resampling process eliminates particles with
small weights. These weak particles are replaced by
others with higher weights, which defines another set
of samples as a better representation for discretized
p(X
k
|Y
k
), described in Eq. 6,
p(X
k
|Y
1:k
) ≈
Ns
∑
i=1
w
i
k
δ(X
k
−X
i
k
). (6)
The result of the resampling process is a new set
of particles with uniform weight 1/N
s
.
2.2 Color Distribution Model
For visual tracking, a color-based model is used to
achieve robustness in situations with non-rigidity, ro-
tation and partial occlusion in image domain. In our
approach, we have choosen the HSV color space,
due to its better stability under lighting changes com-
pared to RGB. A descriptor based on color histogram
(with 10 bins for Hue (H) and Saturation(S) channels)
was used as input for the proposed particle filtering
scheme.
2.3 Weights Setup
For each generated sample of the input image, the his-
togram of the tracked region of interest H
i
is evalu-
ated. Then, the Bhattacharyya Distance (Straka and
ˇ
Simandl, 2005), d
H
O
−H
i
, between H
i
and the his-
togram of the tracked object, H
O
, is calculated as de-
scribed in the Eqs. 7 and 8, is calculated.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
606

MB =
∑
i
√
H
i
p
S
i
(7)
d
H
O
−H
i
=
√
1 −MB (8)
This value is used to calculate the weight of each par-
ticle according to Eq. 9,
w
i
= exp(−λd
2
H
O
−H
i
), (9)
where λ is equal to 20 (more detailed in (Prez et al.,
2002)) and d
H
O
−H
i
is the value of Bhattacharyya dis-
tance for the sample i. The above equation can assure
that if the samples have a high similarity with the tar-
get’s histogram, the weights are adjusted to large val-
ues. If the similarity is small, the weights are reduced
to small values.
2.4 Updating Model
To update the target model, we use the average weight
of the particles that are close to the tracked object. If
this value is above a fixed threshold, w
min
, then the
histogram of the tracked object is updated. Equation
10 shows how our approach prevents wrong update of
the histogram values (H
O:k
) with undesired color val-
ues of the tracked region surroundings (as proposed
(Li and Chua, 2003)).
H
O:k
= (1 −α −β −γ)H
O:k−1
+
+(α)H
Σw
i
.X
+ (β)H
MP
+ (γ)H
O:k=0
(10)
The values of α, β and γ are chosen according to
changes in the target estimation: α is the normalized
weight of the particles estimation, β is proportional
to the normalized weight of the highest particle value
and γ is defined as 0.1.
3 THE PARTICLE FILTER WITH
HYBRID RESAMPLING
In order to overcome the problems related to occlu-
sions, we used the basic structure of a particle fil-
ter based on Sequential Importance Resampling(SIR)
(Gordon et al., 1993), which is described in the fol-
lowing sections.
3.1 Resampling Stage
Here we use a modified version of the approach pro-
posed by (Kitagawa, 1996) and detailed in Algorithm
1. The modified version of SIR Particle Filter algo-
rithm is shown in Algorithm 2. The tracking process
initiates with the assumption that there is no target
occlusion and the proposed particle filter uses the dis-
crete dynamic state model described in Eq. 11,
X
0
k
= X
k−1
+ r
k
X
00
k
= X
0
k−1
+ I
k−1
Y
k
= h(X
k
,s
k
).
(11)
Algorithm 1: Resampling Algorithm.
Data: [{X
j∗
k
,w
j
k
,i
j
}
N
s
j=1
]
Result: [{X
i
k
,w
i
k
}
N
s
i=1
]
Initialization PDF c
1
= 0;
for i = 2 : N
s
do
Build PDF: c
i
= c
i−1
+ w
i
k
end for
Random initialization: u
1
∼U [0,N
−1
s
] for
j = 1 : N
s
do
Move along the PDF: u
j
= u
1
+ N
−1
s
( j −1);
while u
j
> c
i
do
i = i + 1
end while
Assign sample X
j∗
k
= X
i
k
;
Assign weight w
j
k
= N
−1
s
;
Assign parent i
j
= i;
end for
Algorithm 2: Particle Filter with Hybrid Resampling.
Data: [{X
i:k−1
,w
i:k−1
}
N
s
j=1
,Y
k
]
Result: [{X
i:k
,w
i:k
}
N
s
i=1
]
initialization;
for i = 1 : N
s
do
X
i:k
∼ p(X
k
|X
i:k−1
);
Calculate w
∗
i:k
= p(Y
k
|X
i:k
) (Eq. 9);
end for
for i = 1 : N
s
do
if 1 <
wi∗
wi
then
X = X
∗
(Eq.11);
w
i
= w
∗
i
;
else
X = X
k−1
(Eq.11);
w
i
= w
i:k−1
;
end if
end for
Calculate ¯v (Eq.12);
for j = 1 : N
s
do
Normalization w
i:k
=
w
i:k
∑
i=1
Ns
w
i:k
;
end for
Calculate
ˆ
N
e f f
(Eq.5);
if
ˆ
N
e f f
< N
lim
then
Resampling Algorithm 1;
end if
Update Histogram target (Eq. 10);
Estimate
ˆ
X (Eq.18);
The state vector X
k
estimates the position (verti-
cal and horizontal) of the target in the image domain,
ImprovingVisualTrackingRobustnessinClutteredandOccludedEnvironmentsusingParticleFilterwithHybrid
Resampling
607

obtained from a rectangle that encloses the tracked
object. The state vector X
0
k
and X
00
k
are derivatives
(first and second order respectively) of the target po-
sition.The random variables r
k
and s
k
are mutually in-
dependent, modeled by Gaussian functions, and they
describe the process and measuring noises respec-
tively. h(.) is a measure state function. I
k−1
is the
inertial factor, responsible for providing the inertial
movement of the samples and obtained from a Gaus-
sian distribution weighted by the velocity of the par-
ticles.
Assuming that the tracked object velocity v be-
tween frames is uniform, it may be evaluated as,
v
i
= (X
0
i:k
−X
0
i:k−1
). (12)
The expressions of transition probabilities are de-
fined by Eqs. 13, 14 and 15 respectively.
ˆp(X
k
|Y
k:1
) = argmax{π(X
i:k
)}, (13)
p(X
k
|X
k−1
) = p(X
k−1
|r
k
,I)and (14)
p(Y
k
|X
k
) = N(Y
k
|h(X
k
),s
k
). (15)
p(Y
k
|X
k
) is a Normal distribution (N(.)), π(X
i:k
)
is the a posteriori distribution from state samples X,
defined by Eq. 16 and restricted by Eq. 17.
π(X) = p(Y
k
|X
i:k
)[Ω(.)], (16)
Ω(.) =
λ
∑
i=1
p(X
0
k
|X
0
i:k−1
)+
N
s
∑
i=λ
p(X
00
k
|X
00
i:k−1
), (17)
where λ is a part of overall particles set and N
s
is the
maximum number of particles in the filter.
When the target can not be observed in a frame
(for example because of an occlusion), the state tran-
sition for each set of particles is modified. The first
group (first sum of Eq.17) changes from a normal dis-
tribution to an uniform distribution around the last es-
timation before the occlusion, as described in Eq. 18,
X
0
i
=
ˆ
X
i:k−1
+ r
k
, (18)
where the state vector
ˆ
X
k−1
describes the time before
occlusion and r
n
shows the value evaluated from a
uniform distribution U(u|l
k
,u
k
). The lower and up-
per limits changes during the remaining frames. The
other state vector X
00
behaves according to the latest
update of the estimated velocity state vector X
0
, be-
fore occlusion. Following these constraints an esti-
mation of the object position is possible, even though
total occlusion or high cluttered environments occurs.
When the missing target reappears, or the occlusion is
over, the particles are updated by the state transition
shown in Equation 11.
4 EXPERIMENTAL RESULTS
In order to evaluate the proposal method, we used the
Bonn Benchmark on Tracking - Bobot
1
. The Bobot
dataset includes several sequences with many types
of tracking objects such as people, mugs, etc. and
a complete ground-truth (GT) with spatial positions
(horizontal and vertical) and size (height and weight)
of each tracked object. All available sequences have
an spatial resolution 320 ×250 pixels and frame rate
of 25 fps. The proposed Particle Filter with Hybrid
Resampling (PFHR), described in Section 3, uses up
to 200 particles. We compared the proposed method
with two other algorithms: (a) a deterministic algo-
rithm based on template matching (WM); and (b) a
basic implementation of the SIR Particle Filter (also
setup up to 200 particles).
Our method was run in more than six image se-
quences scenarios from the above mentioned bench-
mark. Here we show illustrative results for two se-
quences from the Bobot Database (additional results
in Table 1). The first sequence presents many charac-
teristics of cluttered environments (Subsection 4.1).
The second sequence shows an outdoor sequence
where several objects present high similarity with the
tracked object and total occlusion happens in more the
one occasion (Subsection 4.2).
4.1 Cluttered Environments Sequence
This sequence presents many abrupt background
changes, camera motion and scale transformation.
Figure 1 shows some frames from the sequence with
cluttered environments.
Many errors occur in WM algorithm during the
tracking of the blue mug (See Figs. 1 and 2), espe-
cially when similar objects appear at the bottom of the
image. The basic SIR Particle Filter algorithm has an
adequate response with respect to the spatial position
of tracked object, but the object size is incorrectly es-
timated. On the other hand, PFHR does a much better
job estimating both features, the position and the size
of the tracked objects.
4.2 Outdoors with Total Occlusion
Sequence
This sequence shows a person (tracked object) walk-
ing outdoors while several others people cross the
way, generating occlusions (Fig. 3). Besides occlu-
sions, the tracked person performs scale, rotation and
translation changes during the movement.
1
Available in http://www.iai.uni-bonn.de/∼kleind/
tracking/
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
608

Figure 1: Tracking in cluttered environments. Legend: WM, SIR Particle Filter, PFHR.
(a) (b)
Figure 2: Cluttered environment Sequence - Positions normalized Horizontal (a) and Vertical (b). Ground-truth (GT), WM,
SIR Particle Filter, PFHR.
The WM algorithm missed the tracked person af-
ter occlusion and in the presence of objects that are
similar to the target
2
. The SIR Particle Filter also
2
For Bobot Benchmark when an occlusion occurs the
value assigned by the ground-truth to the horizontal and ver-
tical positions is zero, respectively.
missed the target after occlusions and it was not able
to properly estimate the size of the target. The PFHR
algorithm was capable of estimating both the correct
position and size of tracked person. While a persistent
occlusion occurs, the PFHR strategy performs a pos-
teriori distribution of the state vector X from Equa-
ImprovingVisualTrackingRobustnessinClutteredandOccludedEnvironmentsusingParticleFilterwithHybrid
Resampling
609
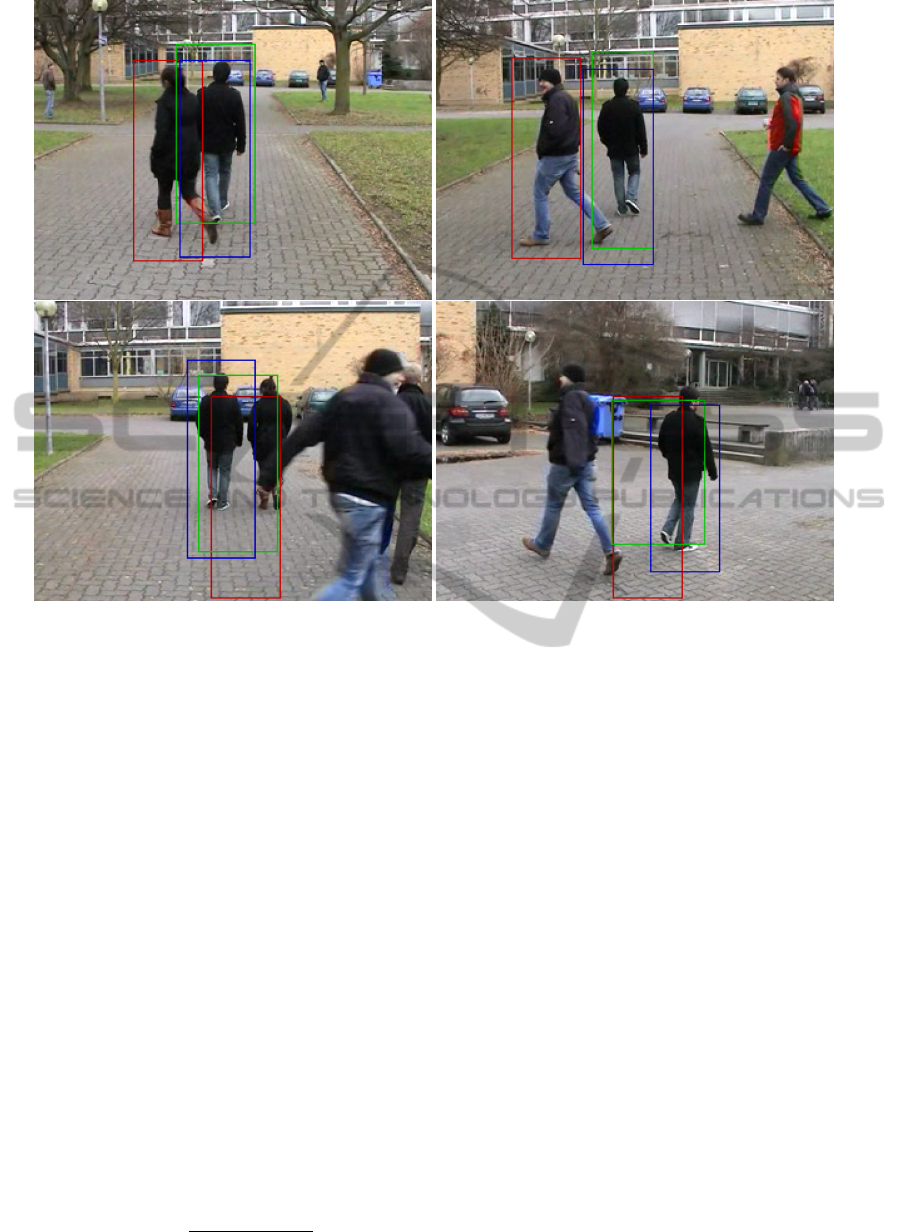
Figure 3: Sequence of the total occlusion of a person walking in outdoor environment. Legend: WM, SIR Particle Filter,
PFHR.
tion 17, including values from the dynamic movement
model in image domain (Equation 11). Specifically
for this occlusion situation we setup half of the num-
ber of particles to the first order model and second
order model respectively. These values were chosen
empirically to obtain the best result for the tracking
performed.
As can be seen in the sequence shown in Fig. 3,
WM is not able to track the person. The SIR Particle
Filter algorithm can track correctly, but with large dis-
placements positions (horizontal and vertical) varia-
tions along the frames, as shown in Fig. 4. The PFHR
track the person with small errors and after occlusion
occurs, even with small oscillations, the algorithm can
recover the target after few frames.
4.3 Tracking Performance Evaluation
To adequately evaluate the tracking algorithm, we
must also take the estimation of target size into ac-
count, as proposed by (Yin et al., 2007). It consists
on measuring the overlap between ground truth and
estimated areas, as defined by Eq. 19,
A(GT, ST ) =
Area(GT ∩ST )
Area(GT ∪ST )
, (19)
where GT represents the ground truth area and ST
represents the area estimated obtained the tracking
algorithm. In according to (Yin et al., 2007), if
A(GT, ST ) is greater than threshold, T
lim
, chosen to
be at least 20%, then we have a true positive. Table
1 shows the results (in percentage) of true positives
along of the total number of frames where the target
is detected, for all method tests. If can be seen that
PFHR shows a higher percentage than WM and SIR,
for all tested sequences.
4.4 Computational Complexity Analysis
The evaluation of the computational complexity in
(Cormen et al., 2001) assigns for each line in the al-
gorithm a variable that represents the running time,
regardless the type of the variable (float, integer, ...).
If the statement is inside a repetition structure (while,
for, ...), the complexity increases proportionally to the
nested loops. Considering n to be the standard num-
ber of input particles of the analyzed Particle Filter,
its computational complexity is O(n), with no relation
to the number of samples.
Comparing the computational complexity ob-
tained from the standard Particle Filter SIR and the al-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
610

(a) (b)
Figure 4: Outdoor occlusion sequence - Positions normalized Horizontal (a) and Vertical (b). Ground truth (GT), WM, SIR
Particle Filter, PFHR.
Table 1: Percentage of true positive data.
PFHR SIR WM
Cluttered Environments 97.60 95.21 82.93
Outdoor w/ Total Occlusion 93.79 90.18 70.07
Background changes 97.60 95,21 82,93
Scale variations 92,30 94.96 33.90
Trajectory changes 95.67 76.87 87.18
Indoor w/ Total Occlusion 88.93 86.06 30.08
Overall Average 94.75 89.74 64.51
gorithm proposed here (PFHR), we achieve the same
computational complexity, even when the resampling
methodology described in Algorithm 1 is applied.
5 CONCLUSIONS
In this paper we presented a new approach for visual
tracking, that uses a Particle Filter with Hybrid Re-
sampling strategy in order to improve robustness. All
tests show that the proposed algorithm (PFHR) active
better results than a deterministic algorithm based on
template matching, and a basic implementation of the
SIR Particle Filter, especially in occlusions and clut-
tered environments. The algorithm proposed (PFHR)
achieve better results, compared to the classical tech-
niques of visual tracking (WM and SIR), especially in
occlusions and cluttered environments.
The presented approach would provide improve-
ments for visual tracking due to the fact that the track-
ing is independent of the motion type (for example
random trajectories) and of the object shape. The
algorithm also offers flexibility in situations where
there is no previous informations about the object to
be tracked. Further works may include the implemen-
tation of the proposed algorithm on a high level pro-
gramming language in order to enable its operation
in real time scenarios (including timing analysis) and
also perform more comparisons with the latest tech-
niques available in visual tracking literature.
REFERENCES
Anandan, P. (1989). A computational framework and an
algorithm for the measurement of visual motion. In
International Journal of Computer Vision, volume 2,
pages 283–310.
Arulampalam, M. S., Maskell, S., Gordon, N., and Clapp,
T. (2002). A tutorial on particle filters for on-
line nonlinear/non-gaussian bayesian tracking. IEEE
Transactions on signal procesing, 50.
Bakhshande, F. and Taghirad, H. (2013). Visual track-
ing in four degrees of freedom using kernel pro-
jected measurement. In Robotics and Mechatronics
(ICRoM), 2013 First RSI/ISM International Confer-
ence on, pages 425–430.
Cormen, T. H., Stein, C., Rivest, R. L., and Leiserson, C. E.
(2001). Introduction to Algorithms. McGraw-Hill
Higher Education, 2nd edition.
ImprovingVisualTrackingRobustnessinClutteredandOccludedEnvironmentsusingParticleFilterwithHybrid
Resampling
611

Doucet, A., De Freitas, N., and Gordon, N., editors (2001).
Sequential Monte Carlo methods in practice.
Doucet, A., Godsill, S., and Andrieu, C. (2000). On se-
quential monte carlo methods for bayesian filtering.
Statistics and Computing, 10:197–208.
Gao, X., You, D., and Katayama, S. (2012). Seam tracking
monitoring based on adaptive kalman filter embedded
elman neural network during high-power fiber laser
welding. Industrial Electronics, IEEE Transactions
on, 59(11):4315–4325.
Ge, W., Collins, R., and Ruback, R. (2012). Vision-based
analysis of small groups in pedestrian crowds. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 34(5):1003–1016.
Gordon, N., Salmond, D., and Smith, A. F. M. (1993).
Novel approach to nonlinear/non-gaussian bayesian
state estimation. Radar and Signal Processing, IEE
Proceedings F, 140(2):107–113.
Kitagawa, G. (1996). Monte carlo filter and smoother for
non-gaussian nonlinear state space models. Journal
of Computational and Graphical Statistics, 5:1–25.
Leibe, B., Schindler, K., Cornelis, N., and Van Gool, L.
(2008). Coupled object detection and tracking from
static cameras and moving vehicles. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
30(10):1683–1698.
Li, J. and Chua, C.-S. (2003). Transductive inference
for color-based particle filter tracking. 3:III–949–52
vol.2.
Limprasert, W., Wallace, A., and Michaelson, G. (2013).
Real-time people tracking in a camera network.
Emerging and Selected Topics in Circuits and Sys-
tems, IEEE Journal on, 3(2):263–271.
Maier-Hein, L., Mountney, P., Bartoli, A., Elhawary, H., El-
son, D., Groch, A., Kolb, A., Rodrigues, M., Sorger,
J., Speidel, S., and Stoyanov, D. (2013). Optical
techniques for 3d surface reconstruction in computer-
assisted laparoscopic surgery. Medical Image Analy-
sis, 17(8):974 – 996.
Mohan, K. and Wilscy, M. (2013). Object ranging and
tracking for aircraft landing system. In Signal Pro-
cessing Image Processing Pattern Recognition (IC-
SIPR), 2013 International Conference on, pages 278–
282.
Prez, P., Hue, C., Vermaak, J., and Gangnet, M. (2002).
Color-based probabilistic tracking. pages 661–675.
Romo-Morales, L., Sanchez, A., Parra-Vega, V., Garcia, O.,
and Ruiz-Sanchez, F. (2013). Visual control for trajec-
tory tracking of quadrotors and real-time analysis on
an emulated environment. In American Control Con-
ference (ACC), 2013, pages 6315–6321.
Rui, T., Zhang, Q., Zhou, Y., and Xing, J. (2013). Ob-
ject tracking using particle filter in the wavelet
subspace. Neurocomputing, 119(0):125 – 130.
¡ce:title¿Intelligent Processing Techniques for
Semantic-based Image and Video Retrieval¡/ce:title¿.
Siradjuddin, I., Behera, L., McGinnity, T., and Coleman,
S. (2013). Image-based visual servoing of a 7-dof
robot manipulator using an adaptive distributed fuzzy
pd controller.
Straka, O. and
ˇ
Simandl, M. (2005). Using the Bhat-
tacharyya distance in functional sampling density of
particle filter, pages 1–6. IFAC, Prague.
Vidal, F. B. and Alcalde, V. H. C. (2005). Motion segmen-
tation in sequential images based on the differential
optical flow. 2nd International Conference on Infor-
matics in Control, Automation and Robotics -ICINCO,
pages 94–100.
Yin, F., Makris, D., and Velastin, S. (2007). Performance
evaluation of object tracking algorithms. Proceeding
Tenth IEEE International Workshop on Performance
Evaluation of Tracking and Surveillance.
Zhou, X., Li, Y., and He, B. (2014). Entropy distribution
and coverage rate-based birth intensity estimation in
gm-phd filter for multi-target visual tracking. Signal
Processing, 94(0):650 – 660.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
612
