
Hierarchical Bayesian Modelling of Visual Attention
Jinhua Xu
Department of Computer Science and Technology, East China Normal University,
500 Dongchuan Road, Shanghai 200241, China
Keywords:
Visual Attention, Visual Saliency, Bayesian Modeling, Object Localization.
Abstract:
The brain employs interacting bottom-up and top-down processes to speed up searching and recognizing visual
targets relevant to specific behavioral tasks. In this paper, we proposed a Bayesian model of visual attention
that optimally integrates top-down, goal-driven attention and bottom-up, stimulus-driven visual saliency. In
this approach, we formulated a multi-scale hierarchical model of objects in natural contexts, where the com-
puting nodes at the higher levels have lower resolutions and larger sizes than the nodes at the lower levels, and
provide local contexts for the nodes at the lower levels. The conditional probability of a visual variable given
its context is calculated in an efficient way. The model entails several existing models of visual attention as
its special cases. We tested this model as a predictor of human fixations in free-viewing and object searching
tasks in natural scenes and found that the model performed very well.
1 INTRODUCTION
Human and many other animals have a remarkable
ability to interpret complex scenes in real time, de-
spite the limited information-processing speed of the
neuronal hardware available for this task. Intermedi-
ate and higher visual processes appear to select a sub-
set of the incoming sensory information for further
processing. The most important function of selective
visual attention is to direct our gaze rapidly towards
objects of interests in our visual environment. There
are two major categories of factors that drive atten-
tion: bottom-up (BU) factors and top-down (TD) fac-
tors. Bottom-up factors are derived solely from the in-
coming visual stimuli. Regions of interest that attract
our attention in a bottom-up way are deemed salient
and the visual features for this selection must be suf-
ficiently discriminative with respect to the surround-
ing features. On the other hand, top-down attention is
driven by cognitive factors such as knowledge, expec-
tations, and current goals (Borji and Itti, 2013).
Computational models of visual attention have
been extensively researched (see (Frintrop et al.,
2010; Toet, 2011) for reviews). Over the past
decade, many different algorithms have been pro-
posed to model bottom-up visual saliency. They can
be broadly classified as biologically-based (Itti et al.,
1998), purely computational, or a combination of
both(Bruce and Tsotsos, 2009). In Itti et al’s model
(Itti et al., 1998), a measure of saliency is computed
based on the relative difference between a target and
its surround along a set of feature dimensions (i.e.,
color, intensity, orientation, and motion). Several sta-
tistical models of visual saliency have also been de-
veloped (Bruce and Tsotsos, 2009; Zhang et al., 2008;
Gao and Vasconcelos, 2009; Itti and Baldi, 2009). In
these models, a set of statistics or probability distri-
butions (PDs) of visual variables are computed from
either the scene the subject is viewing or a set of
natural scenes, and a variety of measures of visual
saliency are defined on these statistics or PDs, includ-
ing self-information (Bruce and Tsotsos, 2009; Zhang
et al., 2008), discriminant power (Gao and Vasconce-
los, 2009), Bayesian surprise (Itti and Baldi, 2009).
For top-downvisual attention, three major sources
of top-down influences have been explored, such as
global scene context (Torralba et al., 2006; Peters
and Itti, 2007), object features (appearance) (Kanan
et al., 2009; Gao et al., 2009; Ehinger et al., 2009;
Elazary and Itti, 2010; Rao et al., 2002; Lee et al.,
2002), and task demands (Triesch et al., 2003; Naval-
pakkam and Itti, 2005). In the contextual guidance
model (Torralba et al., 2006), local features, global
features (scene gist), and object locations were inte-
grated, and visual saliency was defined by the prob-
ability of the local features in the scene based on
the scene gist. The gist was used to select relevant
image regions for exploration. In classical search
347
Xu J..
Hierarchical Bayesian Modelling of Visual Attention.
DOI: 10.5220/0004731303470358
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 347-358
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tasks, target features are a ubiquitous source of atten-
tion guidance (Einhauser et al., 2008). For complex
target objects in natural scenes, there are other fea-
tures that can drive visual attention. In (Kanan et al.,
2009), an appearance-based saliency model was de-
rived in a Bayesian framework. Responses of filters
derived from natural images using independent com-
ponent analysis (ICA) were used as the features. In
(Rao et al., 2002), targets and scenes were represented
as responses from oriented spatio-chromatic filters at
multiple scales, and saliency maps were computed
based on the similarity between a top-downiconic tar-
get representation and the bottom-up scene represen-
tation.
A prevailing view is that bottom-up and top-down
attention is combined to direct our attentional behav-
ior. An integration method should be able to ex-
plain when and how to attend to a top-down visual
item or skip it for the sake of a bottom-up salient
cue (Borji and Itti, 2013). In (Ehinger et al., 2009),
computational models of search guidance from three
sources, including bottom-up saliency, visual features
of target appearance, and scene context, were investi-
gated and combined by simple multiplication of three
components. In (Zelinsky et al., 2006), the pro-
portions of BU and TD components in a saliency-
based model were manipulated to investigate top-
down and bottom-up information in the guidance of
human search behavior. In (Navalpakkam and Itti,
2007), the top-down component, derived from accu-
mulated statistical knowledge of the visual features
of the desired target and background clutter, was used
to optimally tune the bottom-up maps such that the
speed of target detection is maximized.
A hierarchical Bayesian inference model for early
visual processing was proposed in (Lee and Mum-
ford, 2003). In this framework, the recurrent feed-
forward/feedback loops in the cortex serve to inte-
grate top-down contextual priors and bottom-up ob-
servations, effectively implementing concurrent prob-
abilistic inference along the visual hierarchy. It is well
known that the sizes of the receptive fields of neurons
increase dramatically as visual information traverses
successive visual areas along the two visual streams
(Serre et al., 2007; Tanaka, 1996)). For example, the
receptive fields in V4 or the MT area are at least four
times larger than those in V1 at the corresponding ec-
centricities (Gattass et al., 1988), and the receptive
fields in the IT area tend to cover a large portion of
the visual field. This dramatic increase in receptive-
field sizes leads to a successive convergence of visual
information necessary for extracting invariance and
abstraction (e.g., translation and scaling), but it also
results in the loss of spatial resolution and fine details
in the higher visual areas (Lee and Mumford, 2003).
Inspired by the works of (Lee and Mumford,
2003) and the center-surround organization of recep-
tive fields in the early visual cortex, we propose a hy-
pothesis that neurons of the hierarchically organized
visual cortex encode the conditionalprobability of ob-
serving visual variables in specific contexts.
To test this hypothesis, we developed a hierarchi-
cal Bayesian model of vision attention. We used a set
of PDs based on the independent components (ICs) of
natural scenes in a hierarchical center-surround con-
figuration. The neurons at higher levels have larger re-
ceptive fields and lower resolutions, and provide local
contexts to the neurons at lower levels. We estimated
these PDs from natural scenes and derived measures
of BU visual saliency and TD attention, which can
be combined optimally. Finally, we conducted an ex-
tensive evaluation of this model and found that it is
a good predictor of human fixations in free-viewing
and object-searching tasks.
2 HIERARCHICAL BAYESIAN
MODELING OF VISUAL
ATTENTION
An input image is subsampled into a Gaussian pyra-
mid. The original image at scale 0 has the finest reso-
lution, and the subsampled image at the top scale has
the coarsest resolution. At any location in an image,
we sample a set of image patches of size N*N pixels
at all levels of the pyramid. The local feature at scale
s is denoted as F
s
. In this pyramid representation, the
feature at the scale s + 1 is the context of the feature
at scale s (C
s
), as shown in Fig.1. Thus, the nodes
in the higher levels have lower resolutions and larger
receptive fields than the nodes in the lower levels, and
provide the context for the features of the nodes in
the lower levels. It should be pointed out that the con-
textual patch and object context are different; C
s
is the
contextual patch of F
s
, which may or may not include
the object context. Generally, the contextual patches
at higher levels are more probable to cover some ob-
ject context, and a contextual patch at a lower level
just has object features, as shown in Fig.1. By using
the hierarchical center-context structure, both object
and its context features are supposed to be included.
The knowledge of a target object O and its context
includes appearance features at all scales F
i
and loca-
tion X . Assume that the distribution of object features
does not change with spatial locations, then
P(F
0
,F
1
,...,F
n
,X) = P(F
0
,F
1
,...,F
n
)P(X). (1)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
348

Figure 1: Image pyramid (left) and center-context config-
uration (right). The node at a higher level provides local
context for the node at a lower level.
Given the features at location X the probability of the
target object can be calculated as follows:
P(O|F
0
,F
1
,...,F
n
,X) =
P(O,F
0
,F
1
,...,F
n
,X)
P(F
0
,F
1
,...,F
n
,X)
=
1
P(F
0
,F
1
,...,F
n
)
P(F
0
,F
1
,...,F
n
|O)P(O|X) (2)
This entails the assumption that the distribution of a
target feature is independent of spatial locations, i.e.,
P(F
0
,F
1
,...,F
n
|O,X) = P(F
0
,F
1
,...,F
n
|O). (3)
The first term on the right side of equation
(2),1/P(F
0
,F
1
,...,F
n
) , depends only on the visual
features of all scales observed at the location, which is
independent of the object, and therefore it is a bottom
up factor and provides a measure of how unlikely it is
to find a set of local measurements in natural scenes.
This term fits the definition of saliency, and is the
bottom-up saliency measure we use in this paper. The
second term,P(F
0
,F
1
,...,F
n
|O) , represents the top-
down knowledge of the target appearance. Regions
of the input image with features unlikely to belong
to the target object are vetoed and regions with at-
tended features are enhanced. The third term,P(O|X)
, is independent of visual features and reflects the
prior knowledge of where the target is likely to ap-
pear. Next, we will describe each term in detail.
2.1 Bottom-up Attention
The bottom-up attention (saliency) is defined by the
probability of observing visual variables in natural
scenes. Saliency should be high for a rare visual vari-
able, but low for a frequently occurring visual vari-
able.
1
P(F
0
,F
1
,...,F
n
)
=
1
P(F
0
|F
1
)
...
1
P(F
n−1
|F
n
)
1
P(F
n
)
(4)
Here we assume that the multi-scale features are a
Markov chain, that is, given the features at the (i+1)-
scale, the features at the i-th scale are independent on
the features above the (i + 1)-scale. The bottom-up
saliency is given as
S
BU
MS
= log
1
P(F
0
,F
1
,...,F
n
)
= −logP(F
0
|F
1
) − · · · − logP(F
n
) (5)
It is based on the features at all scales, therefore we
use the notation S
BU
MS
, where the low subscript means
Multi-Scale, and the upper subscript means Bottom-
Up. The multi-scale bottom-up saliency can be de-
composed into saliency at each scale, and the bottom-
up saliency at a single scale is defined as:
S
BU
SC
= log
1
P(F,C)
= −logP(F|C) − logP(C) (6)
Here the feature at the (i + 1)-th scale, F
i+1
, serves
as the context of the i-th scale, C
i
. The first term is
the saliency measured by the center feature in a given
context, and the second term measured by the con-
text. Note that similar saliency measures were used in
previous works. In (Bruce and Tsotsos, 2009; Zhang
et al., 2008; Torralba et al., 2006), the saliency mea-
sure was defined as −logP(F) , which is equivalent to
the second term in (6) and the PD was computed from
a single image the subject is seeing (Bruce and Tsot-
sos, 2009; Torralba et al., 2006) or from a set of nat-
ural scenes (Zhang et al., 2008). In (Xu et al., 2010),
the saliency measure was defined as −logP(F|C) ,
where the context was the annular patch around the
circular center. This measure is equivalent to the
first term in (6). In this paper, a multi-scale bottom
up saliency (5) is proposed, which can be regarded
as the combination of visual saliency at all scales of
the pyramid representation of an input scene. It can
be seen that some saliency measures in the previous
works are included in this model.
2.2 Top-down Attention
Top-down attention is based on the knowledge of the
target and its context.
P(F
0
,F
1
,...,F
n
|O)
= P(F
0
|F
1
,O). . . P(F
n−1
|F
n
,O)P(F
n
|O) (7)
Here we assume the target features at the i-th scale
are only dependent on the features at the (i+1)-scale.
The multi-scale top-down attention is then defined as:
S
TD
MS
= logP(F
0
,F
1
,...,F
n
|O)
= logP(F
0
|F
1
,O) + · · · + logP(F
n
|O) (8)
Similarly, the multi-scale TD attention can be decom-
posed into single scale attentions, and the TD atten-
tion at a single scale is defined as:
S
TD
SC
= logP(F,C|O) = logP(F|C,O) + logP(C|O)
(9)
HierarchicalBayesianModellingofVisualAttention
349

The first term in (9) is the top-down attention mea-
sured by the center feature in a given context of the
target. For regions in the image with features likely to
belong to the target, it will have a higher value. The
second term in (9) is the top-down attention measured
by the context of the target.
In some previous top-down attention models,
knowledge of target appearance was used. In (Elazary
and Itti, 2010), P(F|O) was defined as the top-down
saliency, and all features from different channels and
scales were assumed to be statistically independent
from each other to simplify the computation. This is
equivalent to replacing (7) by
P(F
0
,F
1
,··· ,F
n
|O)
= P(F
0
|O)· · · P(F
n−1
|O)P(F
n
|O) (10)
The PD was modeled by a Gaussian distribution in-
dependently. As discussed in (Elazary and Itti, 2010),
features from different scales are unlikely to be statis-
tically independent. In this paper, we will model the
conditionally probability P(F
i
|O) and P(F
i
|F
i+1
,O)
explicitly.
2.3 Model of Object Location
In this paper, an object is represented by a set of local
features, and the local features can be assumed to be
independent of the object locations in input scenes.
The object location attention is
S
LOC
= logP(O|X) (11)
Under the assumption that P(X) is uniformly dis-
tributed and P(O) is constant for any specific object-
search task, we have
P(O|X) =
P(O,X)
P(X)
∝ P(X|O) (12)
The distribution of object locations is modeled by a
Gaussian PD.
P(X|O) = N(X;µ,σ) (13)
The mean and variance of the object locations are es-
timated from the objects in training images. In (Tor-
ralba et al., 2006), a holistic representation of the
scene (the gist) was used to guide attention to loca-
tions likely to contain the target, and then the top-
down knowledge of an object location in a particular
scene was combined with basic bottom-up saliency.
By integration of the scene gist into our model, the lo-
cation attention in (Torralba et al., 2006) can be easily
embedded into our model.
S
LOC
= logP(O|X, G) (14)
Where G is the scene gist. In the experiments in Sec-
tion 4, we did not integrate the scene gist, and still use
the location attention based on (11), since the goal
of this paper is to propose a multi-scale framework
which can combine the BU saliency and TD attention
of object appearance and location.
2.4 Integration of Bottom-up and
Top-down Attention
From Eq.(2), the full hierarchical Bayesian model of
visual attention is given as:
S
FULL
MS
= log
P(F
0
,F
1
,...,F
n
|O)
P(F
0
,F
1
,...,F
n
)
P(O|X)
= S
BU
MS
+ S
TD
MS
+ S
LOC
(15)
The first two terms are based on the multi-scale fea-
tures (appearance), and can be decomposed as:
S
BUTD
MS
= S
BU
MS
+ S
TD
MS
= log
P(F
0
,F
1
,...,F
n
|O)
P(F
0
,F
1
,...,F
n
)
(16)
= log
P(F
0
|F
1
,O)
P(F
0
|F
1
)
+ ··· + log
P(F
n
|O)
P(F
n
)
The single-scale appearance saliency can be defined
as:
S
BUTD
SC
= log
P(F|C,O)
P(F|C)
+ log
P(C|O)
P(C)
(17)
The first term is the saliency measured by the center
feature in a given context, and the second term mea-
sured by the context.
There have been some attempts to integrate both
top-down and bottom-up attention in the literature. In
(Kanan et al., 2009), the top-down saliency was de-
fined as, P(O|F), and a probabilistic classifier was
used to model this PD. This is equivalent to the sec-
ond term in (17). In (Zelinsky et al., 2006), the pro-
portions of BU and TD components in a saliency-
based model were manipulated to investigate top-
down and bottom-up information in the guidance of
human search behavior. The weights of BU and TD
components were tuned manually and there were no
cues on how to tune the parameters. In this paper,
the full attentional measure is the summation of BU
and TD attentions, and there are no parameters to be
tuned.
3 OBJECT REPRESENTATION
AND IMPLEMENTATION
In this section, we will introduce the features used in
this paper and the implementation of the proposed hi-
erarchical Bayesian model.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
350
3.1 Natural Scene Statistics and Object
Representation
The features used here are the ICs of natural scenes.
When ICA is applied to natural images, it yields filters
qualitatively resembling those found in visual cor-
tex (Olshausen and Field, 1996; Bell and Sejnowski,
1997). To obtain object features, we performed ICA
on image patches drawn from the McGill calibrated
color image database using the FastICA algorithm
(Hyvarinen, 1999). We sampled a large number of
scene patches ( 220,000)using the center-contextcon-
figuration. Each sample is a set of patches at all the
selected scales at the same position. The patch size
at all scales was 21x21 pixels. We whitened the in-
put data before running ICA and then reduced the di-
mensionality of the patches from 21*21*3= 1323 to
100 by selecting the most significant principal com-
ponents. The ICs of the context was obtained using
the FastICA algorithm:
C = A
C
U
C
(18)
Here A
C
is the mixing matrix and U
C
is the ICA coef-
ficient vector. The PDs of the context is
P(C) ∝ P(U
C
) =
∏
k
u
k
C
(19)
To calculate the conditional PD P(F|C), we used a
modified FastICA algorithm to perform the ICA in
Eq.(20) to achieve statistical independence within and
between the components of U
C
and U
F
.
C
F
=
A
C
0
A
CF
A
F
U
C
U
F
(20)
Each column of A
C
is a basis of the context C. Each
column of A
CF
is a basis of the center F, paired with
a basis of the context. Each column of A
F
is an un-
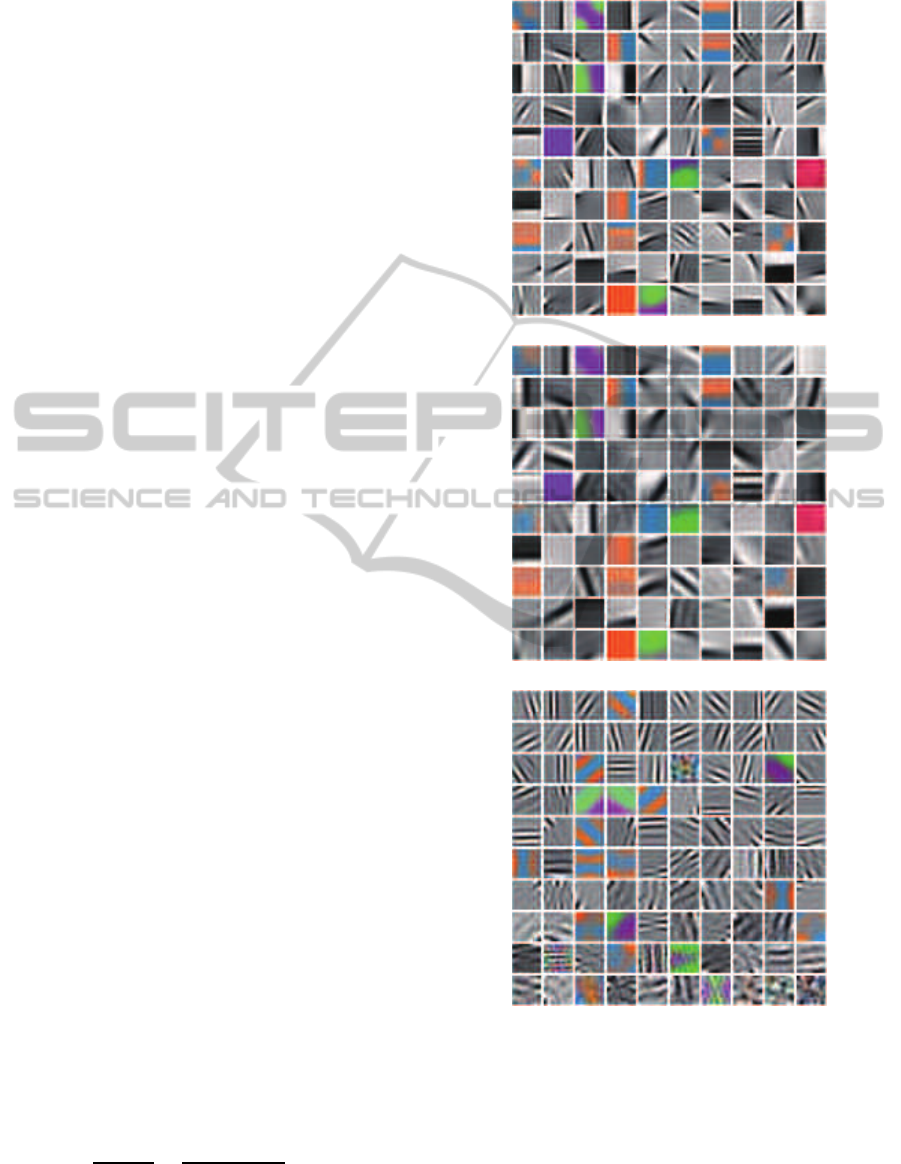
paired basis of the center F. As shown in Figure.2,
each paired basis of the center matches the center of
the corresponding basis of the context, and each of
these three sets has chromatic and achromatic basis.
The joint PDs of a center and its context is
P(C,F) ∝ P(U
C
)P(U
F
) =
∏
k
u
k
C
∏
k
u
k
F
(21)
Here u
k
C
, u
k
F
are the k-th elements of U
C
and U
F
re-
spectively. The conditional PDs, P(F|C), can be de-
rived using the Bayesian formula as follows:
P(F|C) =
P(F,C)
P(C)
=
P(U
F
)P(U
C
)
P(U
C
)
∝
∏
k
u
k
F
(22)
For notational simplicity, we use c
k
to denote the k-th
context feature u
k
C
and f
k
for the center feature u
k
F
.
Figure 2: ICA basis of the context C and center F. Top: ICs
of the context (columns of A
C
in (20) ). Middle: Paired ICs
of the center (columns of A
CF
in (20) ). Each IC matches
the center of the corresponding IC in (A). Bottom: Unpaired
ICs of the center (columns of A
F
in (20)). Each of these
three sets has chromatic and achromatic ICs.
Due to the statistical independence, we only need to
model each element (feature) for contextC and for the
center F from now on. Thus, the terms logP(C) and
logP(F|C) can be calculated as follows:
HierarchicalBayesianModellingofVisualAttention
351

logP(C) =
∑
k
logP(c
k
) (23)
logP(F|C) =
∑
k
logP( f
k
) (24)
Similarly, P(C|O) and P(F|C,O) can be calculated
from the patches extracted on the target. The single-
scale saliency measure in (17) is derived as follows:
S
BUTD
SC
= logP(F|C,O) − logP(F|C)
+ logP(C|O) − logP(C)
=
∑
k
(logP( f
k
|O) − logP( f
k
))
+
∑
k
(logP(c
k
|O) − logP(c
k
)) (25)
We modeled the probability distribution P( f|O), P(f)
, P(c|O) and P(c) in (25) as generalized Gaussian dis-
tributions (GGD).
4 RESULTS
In this section, we test the models performance of hu-
man gaze prediction in free-viewingand object search
tasks.
4.1 Free Viewing
We used the gaze data in free-viewingstatic color nat-
ural scenes collected by Bruce and Tsotsos (Bruce
and Tsotsos, 2009) to evaluate our model of visual
saliency. This dataset contains human gaze collected
from 20 participants in free-viewing120 color images
of indoor and outdoor natural scenes.
To quantitatively access how well our model
of visual saliency predicts human performance, we
used the receiver operating characteristic (ROC) and
the KullbackCLeibler (KL) divergence measure. To
avoid a central tendency in human gaze (Zhang et al.,
2008), we used the measure described in (Tatler et al.,
2005). Rather than comparing the saliency mea-
sures at attended locations in the current scene to the
saliency measures at unattended locations in the same
scene, we compared the saliency measures at the at-
tended locations to the saliency measures in that scene
at the locations that are attended in different scenes in
the dataset, called shuffled fixations.
Our model of visual saliency is a good predictor of
human gaze during the free-viewing of static natural
scenes, outperforming all other models that we tested.
As shown in Table 1, our model has an average KL
divergence of 0.3495 and its average ROC measure is
0.6863. The average KL divergence and ROC mea-
sure for the AIM model in (Bruce and Tsotsos, 2009)
Table 1: ROC metric and KL-divergence for BU saliency of
static natural scenes.
Model KL ROC
(Itti et al., 1998) 0.1130 0.6146
(Gao and Vasconcelos, 2007) 0.1535 0.6395
(Zhang et al., 2008) 0.1723 0.6570
(Bruce and Tsotsos, 2009) 0.2879 0.6799
(Xu et al., 2010) 0.3016 0.6803
S
BU
MS
0.3495 0.6863
are 0.2879 and 0.6799 respectively, which were cal-
culated using the code provided by the authors.
4.2 Visual Search Tasks
We used the human data described in (Torralba et al.,
2006) for visual search tasks. For completeness, we
give a brief description of their experiment. Twenty-
four Michigan State University undergraduates were
assigned to one of three tasks: counting people,
counting paintings, or counting cups and mugs. In
the cup and painting counting groups, subjects were
shown 36 indoor images (the same for both tasks), and
in the people-counting groups, subjects were shown
36 outdoor images. In each of the tasks, targets were
either present or absent, with up to six instances of
the target appearing in the present condition. Images
were shown until the subject responded with an ob-
ject count or for 10s, whichever came first. Images,
subtending 15.8
o
× 11.9
o
, were displayed on an NEC
Multisync P750 monitor with a refresh rate of 143
Hz. Eyetracking was performed using a Generation
5.5 SRI Dual Purkinje Image Eyetracker with a sam-
pling rate of 1000 Hz, tracking the right eye.
The training of top-down components of our
model was performed on a subset of the LabelMe
dataset (Russell et al., 2008). We used 198 images
with cups/mugs, 426 images with paintings, and 389
images of street scenes for training. For testing, we
used the stimuli sets shown to human subjects in Tor-
ralba et al’s experiment.
We obtained 447 cups/mugs, 818 paintings, and
1357 people in the labeled training images. For each
target object, we sampled a set of 21x21 patches from
the images. Each set of patches includes patches at
the same location at all the selected scales. For 21x21
patch size, we used only 3 scales. We sampled at
most 3*3 sets of patches for a cup, 5*5 sets for a
painting, and 2*5 sets for a person. We also sampled
the same number of sets of negative patches from the
background in the training images. We obtained the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
352

PDs, P(C) and P(F|C) , from the negative patches,
and P(C|O) and P(F|C,O) from the object patches.
We obtained the object locations from the cen-
ter of masks in the annotation data, and estimated
P(X|O) for each object category. As discussed in
(Torralba et al., 2006), the horizontal locations of
objects can be modeled by a uniformly distribution.
Therefore, we only used the Gaussian distribution to
model the vertical locations for each object category.
The PDs of the object locations in the training im-
ages are shown in Fig.3. It was observed that cups are
more likely to be in the middle of the images, paint-
ings appear more frequently on the upper part of the
images, and people on the lower part of the images. It
should be pointed out that we focused on appearance
of targets and contexts and used a simple model for
the object location. In (Torralba et al., 2006), scene
gist was used to model the distribution of object loca-
tions in specific input image. As discussed in Section
2.3, the location attention in (Torralba et al., 2006)
can also be integrated into our model.
Fig.4 shows several saliency maps and the top
30% most salient regions for the test images used
in the people search task. The saliency maps
were smoothed using a Gaussian kernel with a half-
amplitude spatial width of 1
o
of visual angle, the same
procedure used in (Kanan et al., 2009; Torralba et al.,
2006) to make comparison with the density maps of
human fixations. The first 5 fixations for all 8 sub-
jects were superimposed on the original images (left
column) and the selected regions (right column). As
shown in Fig.4, most of human fixations fell into the
top 10% most salient regions.
In Fig.5, we compared the saliency maps of the
same images for different tasks. The bottom-up
saliency map is same for both tasks. The top-down
effects of the targets on the saliency maps were shown
in the full saliency map and the selected top 30% most
salient regions. As predicted by our model, the paint-
ings became more salient in the painting search task
and the mugs became more salient in the mug search
task.
To examine how well the hierarchical model pro-
posed here predicts human fixations quantitatively,
we adopted the performance measure used in (Tor-
ralba et al., 2006) and (Kanan et al., 2009). The mea-
sure evaluatesthe percentage of each subjects first five
fixations being made to the top 20% most salient re-
gions of the saliency map. The fixation prediction
rates for the three object search tasks were shown in
Table 2. Forcomparison, the results in (Torralba et al.,
2006) were also shown in Table 2, these data were
read from the figures in their paper. It can be seen
that the BU saliency measure of our model is sim-
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.5
1
1.5
2
2.5
Vertical location, y
p(y) of cups
(a) Cups
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.5
1
1.5
2
2.5
3
3.5
Vertical location, y
p(y) of paintings
(b) Paintings
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.5
1
1.5
2
2.5
3
3.5
Vertical location, y
p(y) of people
(c) People
Figure 3: Distribution of the normalized vertical locations
of objects.(0 means top; 1 means bottom.)
ilar or better than that in (Torralba et al., 2006) for
all three tasks. For the full model, our result is bet-
ter in painting tasks, but not as good as the results
in (Torralba et al., 2006) for mug and people search
tasks. This is because the low-level object features
are used at all scales, the contexts at higher scales are
too coarse and abstract to be discriminative, therefore
for complex objects like pedestrians, the appearance
model is not powerful enough. For small objects like
cups and mugs, the contexts at higher scales are most
from backgrounds, not from objects.
To investigate the effects of patch sizes and scales
on the performance, we re-ran the model using im-
age patches of 11 × 11 pixels at 4 scales. The re-
sults for different patch sizes were similar, with about
HierarchicalBayesianModellingofVisualAttention
353
Table 2: Performance comparison in object search tasks. PR
(PresentRate) is for images with target present, AR (Absen-
tRate) for images with target absent. Average is the average
of PR and AR. CGM is the context-guidance model in (Tor-
ralba et al., 2006)
Tasks Models PR AR Average
BU(CGM) 0.42 0.44 0.43
Painting S
BU
MS
0.47 0.43 0.45
CGM 0.57 0.48 0.53
S
FULL
MS
0.63 0.51 0.57
BU(CGM) 0.71 0.62 0.66
Mug S
BU
MS
0.70 0.61 0.65
CGM 0.82 0.65 0.74
S
FULL
MS
0.74 0.64 0.69
BU(CGM) 0.63 0.49 0.56
People S
BU
MS
0.67 0.51 0.59
CGM 0.78 0.65 0.72
S
FULL
MS
0.71 0.58 0.64
2% improvement on the average rate for patch size of
11× 11 at 4 scales.
We also tested the performance of various saliency
measures proposed in Section 2. Due to page limita-
tions, we show the results of 6 selected measures in
Table 3 to Table 5 for the visual search tasks. These
results show several important aspects of the model
proposed here. 1), all saliency measures make bet-
ter predictions than the location measure only. 2), the
bottom-up saliency measures make good predictions
since the targets (e.g., cups, paintings, and people) are
usually salient. 3), the multi-scale saliency measures
are better than single-scale measures. 4), the measure
with TD and BU integrated are better than the bottom-
up only measure.
The results in Table 2 and Table 3 to Table 5 also
show several weaknesses of the current implementa-
tion of our model. First, the Gaussian PD model of
object locations is weak in some cases. For the mug
search task, the location saliency is slightly higher
than the chance level, 20%. Therefore the integration
of the location saliency into the full model does not
make any improvement. This may be because there
were only 447 mugs/cups in the training images. For
the people search task, there were 1357 people in the
training images, and the location measure performs
better (45% average rate). If the object location distri-
bution is estimated by the scene gist, as implemented
in (Torralba et al., 2006), the full model should have
Table 3: Performance of saliency models in predicting hu-
man gaze for the painting search task.
Measure PR AR Average
S
LOC
0.3644 0.3208 0.3426
S
BU
SC0
0.4648 0.4267 0.4458
S
BU
SC1
0.4605 0.4023 0.4314
S
BU
SC2
0.4032 0.4137 0.4084
S
BU
MS
0.4663 0.4332 0.4498
S
BUTD
SC0
0.4577 0.4593 0.4548
S
BUTD
SC1
0.4548 0.3811 0.4180
S
BUTD
SC2
0.4075 0.2997 0.3536
S
BUTD
MS
0.5681 0.4137 0.4909
S
FULL
MS
0.6298 0.5147 0.5723
Table 4: Performance of saliency models in predicting hu-
man gaze for the mug search task.
Measure PR AR Average
S
LOC
0.2463 0.2138 0.2300
S
BU
SC0
0.6634 0.5948 0.6291
S
BU
SC1
0.6894 0.6138 0.6516
S
BU
SC2
0.6584 0.5724 0.6154
S
BU
MS
0.6955 0.6138 0.6547
S
BUTD
SC0
0.6869 0.5810 0.6340
S
BUTD
SC1
0.7042 0.6345 0.6693
S
BUTD
SC2
0.6844 0.5897 0.6370
S
BUTD
MS
0.7438 0.6448 0.6943
S
FULL
MS
0.7438 0.6397 0.6917
better performance. Second, the low-level object fea-
tures are not sufficiently discriminative with respect
to the backgrounds. As a result, the contribution of
the top-down attention was less than the bottom-up
saliency. In future works, we will include intermedi-
ate and high-level object features and develop more
powerful models of object locations in natural con-
texts.
5 CONCLUSIONS
We made three contributions in this paper. First,
we proposed a biologically inspired, hierarchical
Bayesian model of visual attention. We used multi-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
354

Table 5: Performance of saliency models in predicting hu-
man gaze for the people search task.
Measure PR AR Average
S
LOC
0.5512 0.3498 0.4505
S
BU
SC0
0.6042 0.4778 0.5410
S
BU
SC1
0.6609 0.4915 0.5762
S
BU
SC2
0.6732 0.4898 0.5815
S
BU
MS
0.6708 0.5102 0.5905
S
BUTD
SC0
0.5536 0.4283 0.4910
S
BUTD
SC1
0.6449 0.5171 0.5810
S
BUTD
SC2
0.6967 0.5171 0.6069
S
BUTD
MS
0.6905 0.5512 0.6209
S
FULL
MS
0.7127 0.5751 0.6439
scale features and modeled conditional PDs of these
features to measure TD and BU visual saliency. We
optimally combined top-down attention and bottom-
up visual saliency in a Bayesian framework. Second,
we showed that the model can predict human fixations
very well in free viewing and object searching tasks.
Finally, we obtained a range of useful observations on
top-downattention, bottom-up saliency,visual search,
object detection, and the effects of visual context.
These results support the hypothesis that neurons
in the visual cortex may act as estimators of the con-
ditional PDs of visual features in specific contexts
in natural scenes and the visual features are encoded
progressively downward the hierarchical visual cor-
tex. An ongoing debate in current studies on visual
saliency is whether or not there should be a saliency
map in the brain. In our model, computational units
of the hierarchically organized visual system encode
the conditional PDs of visual variables in natural con-
texts and thus convey saliency information explic-
itly. Therefore, no further complicated operations
are needed to calculate visual saliency and the visual
saliency may distribute at all levels of the visual cor-
tex.
In the pioneering bottom up saliency model (Itti
et al., 1998), multi-scale features were also used, as
in our model. Although both models are biologi-
cally inspired, our model is different from theirs in
the following ways. First, in (Itti et al., 1998), center-
surround differences between a center at a finer scale
and a surround at a coarser scale yield the feature
maps. In our model, the saliency measure was de-
fined based on the conditional probability distribu-
tion of a center in a surround (context). Second, we
used independent components learned from natural
scenes, whereas in (Itti et al., 1998), orientation, color
and intensity features were used. The SUN model
in (Kanan et al., 2009) is most related to our work.
In SUN model, the PD P(O|F) was modeled using
SVM, therefore it is a discriminative approach, dif-
ferent from our generative model, in which P(F|O)
is modeled using GGD. Meanwhile, our model has
multi-scale hierarchical architecture, different from
the single scale in SUN.
ACKNOWLEDGEMENTS
This work is supported by the National Natural Sci-
ence Foundation of China under Project 61175116,
and Shanghai Knowledge Service Platform for Trust-
worthy Internet of Things (No. ZF1213).
REFERENCES
Bell, A. J. and Sejnowski, T. J. (1997). The ”independent
components” of natural scenes are edge filters. Vision
Res, 37:3327–38.
Borji, A. and Itti, L. (2013). State-of-the-art in visual atten-
tion modeling. IEEE Trans Pattern Anal Mach Intell,
35:185–207.
Bruce, N. D. and Tsotsos, J. K. (2009). Saliency, attention,
and visual search: an information theoretic approach.
J Vision, 9:1–24.
Ehinger, K. A., Hidalgo-Sotelo, B., Torralba, A., and Oliva,
A. (2009). Modeling search for people in 900 scenes:
A combined source model of eye guidance. Visual
Cognition, 17:945–978.
Einhauser, W., Spain, M., and Perona, P. (2008). Objects
predict fixations better than early saliency. J Vis, 8:1–
26.
Elazary, L. and Itti, L. (2010). A bayesian model for
efficient visual search and recognition. Vision Res,
50:1338–52.
Frintrop, S., Rome, E., and Christensen, H. I. (2010). Com-
putational visual attention systems and their cognitive
foundations: A survey. ACM Transactions on Applied
Perception, 7:1–46.
Gao, D., Han, S., and Vasconcelos, N. (2009). Discriminant
saliency, the detection of suspicious coincidences, and
applications to visual recognition. IEEE Trans Pattern
Anal Mach Intell, 31:989–1005.
Gao, D. and Vasconcelos, N. (2007). Bottom-up saliency is
a discriminant process. In ICCV. IEEE.
Gao, D. and Vasconcelos, N. (2009). Decision-theoretic
saliency: computational principles, biological plausi-
bility, and implications for neurophysiology and psy-
chophysics. Neural Comput, 21:239–71.
Gattass, R., Sousa, A. P., and Gross, C. G. (1988). Vi-
suotopic organization and extent of v3 and v4 of the
macaque. Journal of neuroscience, 8:1831–45.
HierarchicalBayesianModellingofVisualAttention
355

Hyvarinen, A. (1999). Fast and robust fixed-point algo-
rithms for independent component analysis. IEEE
Trans Neural Netw, 10:626–34.
Itti, L. and Baldi, P. (2009). Bayesian surprise attracts hu-
man attention. Vision Res, 49:1295–306.
Itti, L., Koch, C., and Niebur, E. (1998). A model of
saliency-based visual attention for rapid scene anal-
ysis. IEEE Trans Pattern Anal Mach Intell, 20:1254–
1259.
Kanan, C., Tong, M. H., Zhang, L., and Cottrell, G. W.
(2009). Sun: Top-down saliency using natural statis-
tics. Visual Cognition, 17:979–1003.
Lee, T. S. and Mumford, D. (2003). Hierarchical bayesian
inference in the visual cortex. Journal of the Optical
Society of America A, Optics, image science, and vi-
sion, 20:1434–48.
Lee, T. S., Yang, C. F., Romero, R. D., and Mumford,
D. (2002). Neural activity in early visual cortex re-
flects behavioral experience and higher-order percep-
tual saliency. Nature neuroscience, 5:589–97.
Navalpakkam, V. and Itti, L. (2005). Modeling the influence
of task on attention. Vision Res, 45:205–31.
Navalpakkam, V. and Itti, L. (2007). Search goal tunes vi-
sual features optimally. Neuron, 53:605–17.
Olshausen, B. A. and Field, D. J. (1996). Emergence of
simple-cell receptive field properties by learning a
sparse code for natural images. Nature, 381:607–9.
Peters, R. J. and Itti, L. (2007). Beyond bottom-up: In-
corporating task-dependent influences into a compu-
tational model of spatial attention. In CVPR’06. IEEE.
Rao, R. P., Zelinsky, G. J., Hayhoe, M. M., and Ballard,
D. H. (2002). Eye movements in iconic visual search.
Vision Res, 42:1447–63.
Russell, B. C., Torralba, A., Murphy, K. P., and Freeman,
W. T. (2008). Labelme: A database and web-based
tool for image annotation. International Journal of
Computer Vision, 77:157–173.
Serre, T., Oliva, A., and Poggio, T. (2007). A feedforward
architecture accounts for rapid categorization. Proc
Natl Acad Sci U S A, 104:6424–9.
Tanaka, K. (1996). Inferotemporal cortex and object vision.
Annual review of neuroscience, 19:109–39.
Tatler, B. W., Baddeley, R. J., and Gilchrist, I. D. (2005).
Visual correlates of fixation selection: effects of scale
and time. Vision Res, 45:643–59.
Toet, A. (2011). Computational versus psychophysical
bottom-up image saliency: a comparative evaluation
study. IEEE Trans Pattern Anal Mach Intell, 33:2131–
46.
Torralba, A., Oliva, A., Castelhano, M. S., and Henderson,
J. M. (2006). Contextual guidance of eye movements
and attention in real-world scenes: the role of global
features in object search. Psychol Rev, 113:766–86.
Triesch, J., Ballard, D. H., Hayhoe, M. M., and Sullivan,
B. T. (2003). What you see is what you need. J Vis,
3:86–94.
Xu, J., Yang, Z., and Tsien, J. Z. (2010). Emergence
of visual saliency from natural scenes via context-
mediated probability distributions coding. PLoS ONE,
5.
Zelinsky, G. J., Zhang, W., Yu, B., Chen, X., and Samaras,
D. (2006). The role of top-down and bottom-up pro-
cesses in guiding eye movements during visual search.
In NIPS’06. Cambridge, MA: MIT Press.
Zhang, L., Tong, H., Marks, T., Shan, H., and Cottrell,
G. W. (2008). Sun: A bayesian framework for saliency
using natural statistics. J Vis, 8:1–20.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
356

APPENDIX
Figure 4: Saliency maps and selected regions for the people search task. Each panel shows the original images with the first
5 fixations for all 8 participants superimposed (left), the full saliency maps (middle), the top 30% most salient regions of the
saliency maps with the subject fixations (right), where yellow, green, and blue correspond to the top 10, 20, and 30% most
salient regions respectively.
HierarchicalBayesianModellingofVisualAttention
357
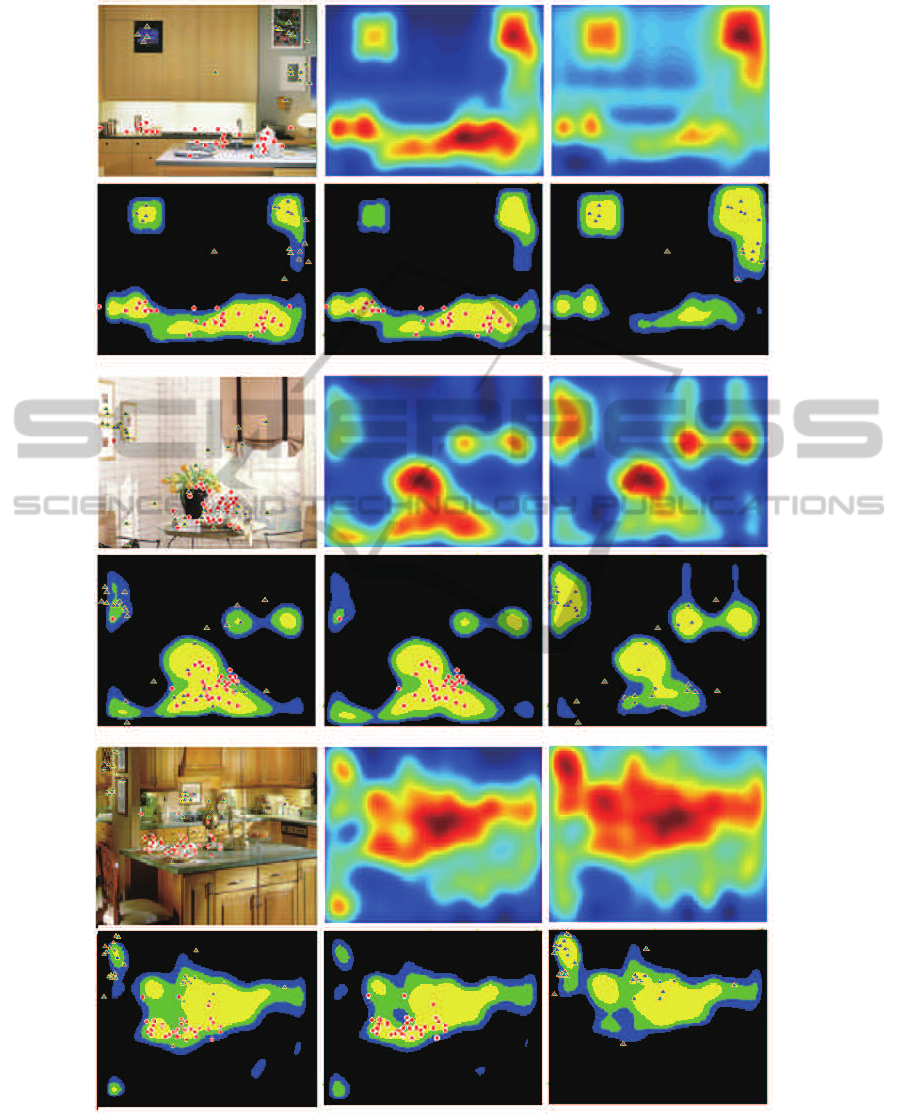
Figure 5: Saliency maps and selected regions for the mug and painting search tasks. The left column of each panel is the
original image (top) and top 30% most salient regions from bottom-up saliency map (bottom) with the first 5 fixations for all
subjects superimposed for both search tasks (red circles for mug search and blue triangles for painting search). The middle
column is the full saliency map (top) and its top 30% most salient regions (bottom) for cup search task. The right column is
the full saliency map (top) and its top 30% most salient regions (bottom) for painting search task.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
358
