
Non-rigid Surface Registration using Cover Tree based Clustering
and Nearest Neighbor Search
Manal H. Alassaf
1, 2
, Yeny Yim
3
and James K. Hahn
1
1
Department of Computer Science, George Washington University, Washington DC, U.S.A.
2
Department of computer science, Taif University, Taif, Saudi Arabia
3
Samsung Electronics, Suwon, Geonggi-Do, Republic of Korea
Keywords: Non-rigid Registration, Iterative Closest Point Algorithm, ICP, Cover Tree, Clustering, Nearest Neighbor
Search.
Abstract: We propose a novel non-rigid registration method that computes the correspondences of two deformable
surfaces using the cover tree. The aim is to find the correct correspondences without landmark selection and
to reduce the computational complexity. The source surface S is initially aligned to the target surface T to
generate a cover tree from the densely distributed surface points. The cover tree is constructed by taking
into account the positions and normal vectors of the points and used for hierarchical clustering and nearest
neighbor search. The cover tree based clustering divides the two surfaces into several clusters based on the
geometric features, and each cluster on the source surface is transformed to its corresponding cluster on the
target. The nearest neighbor search from the cover tree reduces the search space for correspondence
computation, and the source surface is deformed to the target by optimizing the point pairs. The correct
correspondence of a given source point is determined by choosing one target point with the best
correspondence measure from the k nearest neighbors. The proposed energy function with Jacobian penalty
allows deforming the surface accurately and with less deformation folding.
1 INTRODUCTION
Iterative closest point algorithm (ICP) has been
widely used for registration of the surfaces (Besl and
McKay 1992; Zhang 1992). The ICP efficiently
calculates the transformation between two surfaces
by minimizing the Euclidean distance of the
correspondent point pairs. However, this distance
based measure can lead the optimization to the local
minima when the two surfaces are not close enough.
Another limitation of ICP algorithm is that it
requires searching all the points of a surface to
determine the best correspondence for a point of
another surface. Therefore, its time complexity is
O(n
2
).
The correspondence computation can be
accelerated using efficient nearest neighbor (NN)
search algorithms (Greenspan and Godin 2001). The
k-d tree has been widely used to limit the search
space to one set which is the nearest (Bentley 1975).
The k-d tree is a binary tree that is built by
repeatedly dividing the space into subspaces using
hyper planes. The k-d tree construction is simple and
it is quite efficient especially for low dimensional
data. However, its axis-aligned point division
regardless of point distribution can result in poor
search performance (Kumar et al. 2008). Greenspan
and Godins proposed a variant of k-d tree with
spherical triangular constraint that specifies the
neighborhood which lie within a sphere of radius
(Greenspan and Godin 2001). Kumar et al. used the
vantage point tree (vp-tree) that divides the space by
using hyper shells with increasing radius instead of
using hyper planes (Kumar et al. 2008).
It is important to find the correct correspondence
as well as to accelerate the computation. To
determine the robust correspondences, Anguelov et
al. proposed a joint probabilistic model that enforces
the correlation between all correspondences in terms
of geodesic distance and penalizes the stretching and
twisting of the links between points (Anguelov et al.
2005). Huang et al. also constrained the geodesic
distances between points to be preserved by the
correspondences (Huang et al. 2008). They
initialized the candidate correspondences of all
points by finding the closest in Euclidean space and
579
H. Alassaf M., Yim Y. and K. Hahn J..
Non-rigid Surface Registration using Cover Tree based Clustering and Nearest Neighbor Search.
DOI: 10.5220/0004738405790587
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 579-587
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

feature space and pruned inconsistent mappings
based on the geodesic distance constraint.
In this paper, we propose an accurate non-rigid
ICP registration method that finds the correct
correspondences and reduces the computation
complexity with an efficient tree search. We address
the two challenges of the naïve ICP algorithm: the
optimization to the local minima and high time
complexity for correspondence computation. The
main idea of our method is to reduce the number of
possible correspondences from two surfaces by
using a hierarchical cover tree structure and find the
point pairs with the best correspondence measures.
A cover tree is constructed from the points of the
two surfaces which are target T and initially
matched source S. Given a point p on S, the
candidate corresponding points on T are determined
by traversing the cover tree and finding the nearest
neighbors from the tree instead of searching all the
points on T. This correspondence search is applied
for rigid ICP as well as non-rigid ICP. For rigid
registration, the nearest neighbors are determined by
dividing the tree nodes into several clusters. The
search space is limited to the leaf nodes of the
cluster which p belongs to. For non-rigid ICP, k-NN
search is performed on the tree to find the k-nearest
leaf nodes from T. We propose a correspondence
measure which takes into account local geometric
similarity.
For registration of the two surfaces, energy
minimization frameworks that minimize the distance
function between the surfaces have been proposed.
The distance energy function has been used to fit
one surface to another in conjunction with marker
error term between manually selected feature
correspondences. Allen et al. proposed a non-rigid
ICP algorithm that determines local affine
transformation per point by optimizing the distance
function (Allen et al. 2003). They added stiffness
term to force neighboring points to have similar
transformations and marker error term to avoid the
optimization to the local minima. Amberg et al.
optimized a similar energy function for fixed
stiffness and correspondences (Amberg et al. 2007).
They demonstrated accurate registration results for
the surface with a large missing region. Pauly et al.
optimized a distance function that calculated the sum
of the distances between a surface point and local
neighborhood of a point on another surface (Pauly et
al. 2005). Li et al. optimized the correspondence as
well as the deformation parameters (Li et al. 2008).
They also optimized a confidence weight of each
node in order to determine the correspondences
reliably and deal with the partial overlap problem of
the surfaces. In these related works, the stiffness
term has been effectively used to regularize the
deformation by minimizing the difference between
the deformation vectors of the adjacent points on the
surface. However, it does not deal with the problem
of the deformation folding which has the negative
Jacobian determinant of the deformation and results
in crossing of the adjacent deformation vectors.
To register the two surfaces with less
deformation folding while minimizing the distance
and stiffness, we propose a new energy function that
consists of the terms: fitting, stiffness, and Jacobian
penalty. The fitting term finds the deformation
vectors that minimize the error distances between
two corresponding point sets and the stiffness term
regularizes the deformation by minimizing the
difference between the deformation vectors of the
adjacent points on the surface. The Jacobian penalty
term penalizes negative Jacobian determinant of the
deformation (Rueckert et al. 2006). The Jacobian
matrix of the transformation has been applied to
guarantee the invertibility of the transformation
mainly for image registration (Vercauteren et al.
2009; Rohlfing et al. 2001). We adapt this penalty to
prevent the deformation folding on the surface.
The non-linear optimization of the two point sets
in the non-rigid registration of the surfaces is
computationally expensive since the number of
points on a surface is usually several thousands. For
efficient optimization, previous works proposed
reduced deformable models which divided the
surface into many small patches and transformed
them rigidly. (Huang et al. 2008; Li et al. 2008;
Chang and Zwicker 2009; Liu et al. 2009).
To closely match the two surfaces and thus
accelerate the optimization of the non-rigid ICP, we
propose a cluster-based locally rigid registration that
splits the two surfaces into clusters and transforms
each cluster on S to the corresponding cluster on T
by applying rigid ICP. All the points on T that
belong to the same cluster with the given source
point p considered in the corresponding cluster on T.
We refer to this registration method as a cluster-
based ICP. The previous reduced deformable models
have used regularly sampled points (Li et al. 2008;
Sumner et al. 2007), voxel grid structure (Chang and
Zwicker 2009), or clusters (Huang et al. 2008; Liu et
al. 2009). In the aspects of using the hierarchical
clustering for registration, our cluster-based ICP is
similar to that of (Huang et al. 2008; Liu et al. 2009).
However, our hierarchical clustering is based on
cover tree and our cluster-based ICP is applied to
initially match two input surfaces not for deformable
registration.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
580

2 METHOD
The non-rigid registration of the surfaces aims to
find the correct correspondences between S and T
and align S to T accurately by using the
correspondences. We propose a new non-rigid
registration method of the surface to achieve these
two goals. The proposed method consists of four
steps which are initial alignment, construction of the
cover tree, cluster-based ICP, and non-rigid ICP
registration. The two input surfaces are initially
matched by aligning the points with minimum z
depth, which are the positions of the nose tip in our
tested dataset, and scaling the surface S according to
the maximum ranges of the points on S and T. After
initial alignment, we construct a cover tree from the
points of both surfaces and use it for hierarchical
clustering and k-NN in the correspondence
computation of the cluster-based ICP and non-rigid
ICP, respectively. For the cluster-based ICP, we first
find the correspondence of each point on S among
the points in the same cluster which comes from T
and has the best correspondence measure. Once the
corresponding point sets on the two surfaces have
been determined, each cluster on S is locally
transformed to T by minimizing the error between
the two point sets. In the non-rigid ICP registration,
the candidate correspondences of a given point on S
are computed by looking for its k-NN in the cover
tree, which originate from T. A correct
correspondence is chosen by finding the best
correspondence measure among the k nearest points.
With the two correspondent point sets, the proposed
method deforms S to T by optimizing the energy
function that includes a fitting term, a stiffness term,
and a Jacobian penalty term.
2.1 Use of Cover Tree
The cover tree is a leveled tree where levels are
decreased as the tree is descended (Beygelzimer et
al. 2006). Each node in the tree corresponds to a
point in dataset P. Let P
i
denote the points of P at
level i. The cover tree has three properties of
nesting, covering, and separation. The nesting
property indicates that a point at a level i should
appear at all the levels beneath it. The covering
property satisfies the condition that the distance
between a point q in P
i-1
and its parent in P
i
is at
most 2
i
. The separation property meets the condition
that the distance between two distinct points at the
same level is at least 2
i
(Fig. 2).
The construction of the cover tree takes O(n)
space and O(c
6
n log n) time complexity. The time
complexity does not only depend on the number of
points of the dataset n, but also on the expansion
constant c. Expansion constant is defined as the ratio
of the points in a sphere with the maximum radius r
over the points in a sphere with the radius of r/2
(Beygelzimer et al. 2006).
In this paper, we adopt the cover tree data
structure for hierarchical clustering and k-NN
search. By using the cover tree with its nesting,
covering, and separation properties, the problem of
finding the correct correspondence in the ICP
registration is reduced from searching all the points
on T to searching a subset of the points. This subset
of the points is represented as a cluster of the points
within -radius for cluster-based ICP and as k
nearest points for non-rigid ICP.
2.1.1 Cover Tree Construction
using Distance and Surface Normal
Originally, the cover tree is constructed by taking
into account the distance between the points. Even
though the distance based cover tree can be used for
clustering points, it is difficult to obtain meaningful
clusters from surfaces that are not flat and have
complex geometric shapes. In order to subdivide the
surface into meaningful clusters such that the points
in each cluster have similar geometric features, we
extend the tree construction method by considering
the angular difference between the surface normal
vectors of the points as well as the Euclidean
distance between the points. We define our new
distance metric as a function f of two terms; one for
the Euclidian distance between two points x and y, d,
and the other for the angle θ between the normal
vectors, as described in f(x,y)=d(x,y)+λ(1-cosθ (x,y)).
As the angle θ increases, the value of the second
term increases which makes the value of f increase.
As a result, the two points are located far away from
each other in the cover tree. If the two points have
the same surface normal, only d affects the value of f
and the two points will be located in the cover tree
according to the distance. The parameter λ is a
weighting factor that controls the effect of the angle
θ. The value λ is determined according to the
features of the surface. As λ increases, the effect of
the second term becomes larger and the surface will
be clustered into points with similar geometric
features. However, setting λ to max can partition the
points that belong to one anatomical feature into
many clusters with respect to the normal variations
in that feature as shown in Fig. 3. We set λ to 0.05
experimentally to divide the surface into meaningful
clusters which correspond to anatomical features. By
Non-rigidSurfaceRegistrationusingCoverTreebasedClusteringandNearestNeighborSearch
581

using the function f in the tree construction, a parent
q for a new point p should satisfy the following
condition f(p,q) ≤ 2
i
. Here, i is the level of the cover
tree where q is located. The span of the cover tree,
including the number of levels, is affected by f. This
proposed function f satisfies the properties of a
distance function in a metric space.
2.1.2 The Use of the Cover Tree
for Hierarchical Clustering
After the cover tree is built from the points of the
two surfaces, the points are divided into k disjoint
clusters by cutting the tree at the level i with k nodes
such that each of the k nodes is a root of a sub-tree
and each sub-tree is considered a cluster as shown in
Fig. 2. As a result, each cluster denoted by C
j
is
rooted at its center, and the neighbor points within a
radius
2
i
from the center correspond to the leaf
nodes of the sub-tree.
2.1.3 The Use of the Cover Tree for NN
Search
The correspondence computation can be formulated
as a NN search problem in naïve ICP due to the fact
that it is based on the distance between the points.
In
the NN search problem, the dataset P of n points is
pre-processed such that one can find the nearest
neighbor point p of a given query point q with the
minimum distance d(q, p). The constructed cover
tree is used to find the k-NN points. Given a point
p ∊ P, the nearest points are determined by searching
the children list Q of p and finding a point with the
minimum error d(p,Q) =
min
q
∈
Q
d(p,q). The error is
calculated with respect to the distance and angular
difference of the normal vectors. The exact k-NN
points are determined by sorting the errors between
p and q and finding the k points with the smallest
error. The NN search takes O(c
12
log n) time
(Beygelzimer et al. 2006).
2.2 Cluster-based ICP Registration
Rigid registration has been applied to compensate
the translational and rotational mismatch between
two surfaces. Recently, local rigid or affine
registration was used for reduced deformable model
(Chang and Zwicker 2009; Huang et al. 2008; Li et
al. 2008). By reducing the degrees of freedom for
optimization while considering the rigidity, S can be
deformed to T quickly and accurately. The proposed
cluster-based ICP method calculates the local rigid
transformations from several clusters which are
partial patches of the surfaces. It is used to provide a
good initial match for non-rigid registration.
2.2.1 Correspondence Computation
To find the correspondence of a point p on S among
the points on T, two surfaces are divided into
multiple clusters by cover tree based hierarchical
clustering described in Section 2.1.2. Only the points
in the same cluster with the p are considered as
candidates. For all candidate points q which come
from T, the correspondence measure is calculated
using E
Corr
as in Eq. 1 and the point with the
minimum measure E
Corr
is determined as the
correspondence of p:
IsometricNormalDistCorr
EEEqpE
),(
(1)
The first term E
Dist
is used to find the closest point
by calculating the Euclidean distance between two
points. The correspondence computation only using
Euclidean distance is not sufficient even though
rough correspondence is established by cover tree
based hierarchical clustering. To find more reliable
correspondence, we calculate two local geometric
measures. E
Normal
which is the angle between the
normal vectors is used to penalize the points in the
opposite surface direction. E
Isometric
is defined to
enforce the two corresponding points that have
similar connectivity with the adjacent points. This
measures the absolute difference between the length
of the connecting edges of p and that of the
connecting edges of q. The parameters, α and β,
control the effect of E
Normal
and E
Isometric
against E
Dist
.
As these parameters for local geometric features are
larger, the effect of E
Dist
decreases and the
determined corresponding point sets can slow down
the optimization. We set α and β to 0.05
experimentally in order to find the correspondence
that has similar geometric features while obtaining
the reasonable optimization performance.
2.2.2 Optimization
The transformation of each cluster is calculated by
minimizing the rigid registration error using Eq. 2,
where R and Tr are the rotation matrix and
translation vector, and p
i
and q
i
are the points on S
and T:
n
i
iiR
TrRqpE
1
2
)(
(2)
To reduce the discontinuity of the transformations
between clusters, the transformation of each point is
calculated by weighted averaging the rigid
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
582

transformations of the k nearest clusters. The weight
for each cluster is calculated in proportion to the
distance between the point and the center of each
cluster.
2.3 Non-rigid Registration
The proposed non-rigid ICP registration consists of
two steps. First, the correspondence of a given
source point is computed by searching k-NN in the
cover tree and finding a point with the minimum
correspondence measure. Second, once the two
corresponding point sets are determined, S is
deformed to T by minimizing the proposed energy
term so that the deformation is both accurate and
smooth, and has less deformation folding.
2.3.1 Correspondence Computation
For non-rigid registration of S to T, it is very
important to determine the correspondences reliably
and efficiently. To address this challenge, we
propose a method for correspondence computation
of non-rigid ICP registration. To find the
correspondence of a given point p on S, the search
space is limited to k-nearest points on T by using the
cover tree based k-NN search as described in
Section 2.1.3. Only k points which are the nearest
from p are considered as candidates. As k is larger,
more points are included as candidates and the
computation time of E
Corr
will increase. When k is
too small, possible candidates that might have the
best correspondence measure could be missed even
though the computation will be faster. We set k to 10
experimentally to find the best correspondence
among the sufficient number of candidates while
reducing the computation time. For all candidate
points, the correspondence measure is calculated
using Eq. (1) as described in Section 2.2.1, and the
point with the minimum measure E
Corr
is determined
as a correspondence.
2.3.2 Optimization
After determining two correspondent point sets from
S and T as P and P’, respectively, the points in P are
deformed to the points in P’. The deformation D is
calculated by minimizing the registration error E
N
described in Eq. 3:
N
i
JacobianSmoothFitiN
EEEE
0
(3)
The first term E
Fit
measures the accuracy of
alignment by calculating the distance between P’
and D(P). The second error term E
Smooth
regularizes
the deformation by minimizing the sum of
differences of the deformation between adjacent
points as shown in Eq. 4:
)(
)()())((
ij
pNp
ijiSmooth
pDpDpDE
(4)
The third term E
Jacobian
regularizes the deformation
by assigning penalty to the points with the negative
Jacobian determinant. To impose penalty to the
points with negative Jacobian and avoid the folding
of the deformation, E
Jacobian
is defined by Eq. 5:
)))((1log())(( DJDetcpDE
iJacobian
(5)
where Det(J) is the determinant of the Jacobian
matrix J, and c is the constant that adjusts the effect
of the negative Jacobian term. The constant c is
proportional to the distance between p
i
and its
farthest neighbor. This Jacobian penalty term is
applied only for the points with the negative
Jacobian. To minimize E
N
between two
corresponding point sets, the Levenberg Marquardt
optimization algorithm is applied (Marquardt 1963).
γ and δ are the parameters that adjust the effect of
stiffness term and Jacobian term, respectively. If the
stiffness parameter γ is small, the optimization
converges quickly to the closest point based on the
fitting term. However, the surface mesh becomes
very irregular and bumpy. As γ is larger, the
deformation is smoother but the optimization
becomes slower and the surface may shrink. We set
γ to 1. The parameter δ for Jacobian term is set to 1
if the point has a negative Jacobian. Otherwise the
value is set to 0. The optimization ends when the
termination condition is met. If the reduced error
measure after each iteration i, E
N
i
- E
N
i-1
, is less than
5% of the error measure E
N
i
, it is considered that the
optimization converges to the optimum. By
penalizing the deformation with stiffness term and
Jacobian term, the proposed optimization regularizes
the deformation so that the deformed surface has
smooth deformation with less folding.
3 EVALUATION METHODS
To evaluate the proposed method, we tested three
different datasets; CT-simulated CT dataset, CT-
Kinect dataset, CT-CT dataset. For simulated
dataset, we extracted 3D surface from CT
(Computed Tomography) scans using Marching
Cube Algorithm (Lorensen and Cline 1987) and
Non-rigidSurfaceRegistrationusingCoverTreebasedClusteringandNearestNeighborSearch
583

used it as the source surface S. We simulated the
target surface T by warping the jaw and nose of S
using thin-plate spline warping (Bookstein 1989).
For CT-Kinect dataset, S was generated from the 2D
color image and depth map obtained from Microsoft
Kinect camera. A 3D surface with color was
generated from depth map by back-projecting the 2D
pixel positions. The surface T was extracted from
the CT scans. For CT-CT dataset, we extracted S
and T from two CT datasets which were acquired
from two different subjects. We also tested the
registration accuracy of noisy CT datasets in order to
demonstrate the robustness of the proposed method
to noisy dataset. Table 1 shows the number of points
in each tested dataset.
To demonstrate the effect of the proposed cover
tree-based clustering method, we compared our
clustering method with two k-means clustering
algorithms that initialize the cluster centers in
different ways. The first uses manually selected
initial centers (k-means manual) (Lloyd 1982) and
the second detects the centers automatically using k-
means++ algorithm (k-means++) (Arthur and
Vassilvitskii 2007).
To evaluate the effect of the proposed
correspondence computation using cover tree, we
compared the proposed method with the naïve ICP
algorithm, ICP algorithm with k-means manual, ICP
algorithm with k-means++ in aspects of the
registration accuracy. To compare the three
clustering methods in the same condition, we used
the same number of the clusters obtained from the
proposed clustering method for k-means manual and
k-means++ seeds number. The proposed method cut
the cover tree at depth equals to 3. We implemented
the naïve ICP algorithm that finds the
correspondence of a point p on S by searching the
point with the minimum distance from p among all
the points on T. For cluster-based registration, the k-
means manual and k-means++ clusters are used in
comparison with proposed method. For non-rigid
ICP correspondence, a cover tree based NN search
was applied to the results of the cluster-based ICP of
three different clustering algorithms along with
naïve ICP.
We visualized the color-coded error surfaces in
which the color of each surface point indicates its
own error measure. The point was colored red if the
depth of a point on T is closer than the depth of the
corresponding point on the deformed S. The point
was colored green in the opposite case.
4 RESULTS
Fig. 1 shows the result of the proposed registration
method for three different datasets. The first row
shows that the overall shape of S near jaw and nose
was deformed to the simulated surface T accurately.
The details of the surface such as lips and eyes were
not preserved due to the lower resolution of original
surface and the effect of stiffness term during
optimization. The second row shows the noisy
surface S acquired from Microsoft Kinect camera
was deformed to T closely. Even though the two
surfaces obtained from different subjects by
different devices have distinctively different nose
and mouth shapes, the color-coded error map shows
that entire face of S was deformed to T correctly.
There was a subtle difference between T and
deformed S near teeth and nose of the subject. The
third row shows that the two face surfaces acquired
from two different subjects were registered
accurately after applying the proposed method. The
surface S with open mouth and low nose tip was
deformed to the surface with closed mouth and high
nose tip that has little difference with T.
The registration errors of three methods with
clustering were lower than that of Naïve ICP. The
proposed method with cover tree led to the lowest
reduction rate against Naïve ICP. Especially in
Kinect-CT dataset with irregular point distribution,
the reduction rate of the proposed method was 28%
while those of k-means manual and k-means++ were
26% and 22%, respectively. There was no
significant difference in simulated CT and CT-CT
datasets which have relatively regular point
distributions. Fig. 4 shows the registration accuracy
of the noisy datasets compared to original dataset.
The registration errors of the k-means manual and k-
means++ increased in two noisy datasets, as opposed
to the cover tree method. The registration error
decreased in simulated dataset with the cover tree
method. Also, the increase of the error was the
smallest with cover tree in CT-CT dataset.
The proposed method which optimizes
Jacobian penalty term led to the smallest percentage
of the negative Jacobian in simulated dataset and
CT-CT datasets as shown in Table 2.
Table 3 shows the processing time for
clustering the points and finding correspondences by
using three different methods. The time for cover
tree based clustering was shorter than those for two
k-means clustering methods. Once the cover tree is
constructed in a pre-processing step, the proposed
clustering method only takes time for cutting the tree
at a specific level and labelling the points. While, k-
means manual and k-means++ require iterative
calculation of the distances until stabilization.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
584

5 CONCLUSIONS
In this study, we proposed a non-rigid surface
registration method which computes the
correspondence between two surfaces accurately and
efficiently. The cover tree based hierarchical
clustering and NN search were utilized to reduce the
search space for correspondence points in ICP. This
reduced the computational complexity of the
correspondence computation. In addition,
registration accuracy of the proposed method is
better than the methods using conventional
clustering, especially in the noisy dataset. The
proposed negative Jacobian term of energy function
led to registration with less deformation folding.
Extending cover tree construction to consider
orientation of the surface points introduced a hybrid
similarity measure for ICP that allows capturing
more reliable correspondence points.
A cover tree-based hierarchical clustering
reduced the search space of the correspondence
candidates of each point on S from all points on T to
only (1-c
4d
)/(1-c
4
) of the points, where d is the depth
of the sub-tree that corresponds to a cluster.
Therefore, the complexity was reduced from O(n
2
)
to O(n(1-c
4d
)/(1-c
4
)). Proof of this reduction can be
found in appendix 1. In addition, a cover tree-based
NN search found the k correspondence candidates of
every point on S from the points on T. The search
space of the correspondence computation for a point
was limited to k and the complexity was reduced to
O(c
12
n log n). The proposed cover tree based NN
search was not compared with the other NN search
algorithms such as k-d tree or v-p tree. In the future,
we consider doing this comparison.
We proposed an optimization function for non-
rigid ICP algorithm, including fitting term, stiffness
term, and Jacobian term. The proposed optimization
function with Jacobian penalty term regularized the
deformation so that the resulted surface has smooth
deformation with less folding. The results showed
that the proposed method led to the smallest ratio of
the negative Jacobian compared to the other non-
rigid ICP methods. The results also showed that the
ratio of the negative Jacobian was reduced by
incorporating proposed negative Jacobian term.
One interesting result was that the proposed
method showed the best results in CT-Kinect
datasets in aspects of registration accuracy and
percentage of the negative Jacobian. The Microsoft
Kinect camera has relatively poor perception
accuracy for the depth and thus the reconstructed
surface from the depth map was very noisy and
bumpy. This result demonstrated that the cover tree
based hierarchical clustering was suitable for the
noisy datasets. We improved the registration
accuracy by taking into account the distribution and
orientation of the point for tree construction.
REFERENCES
Allen, B., Curless, B., & Popović, Z., 2003. The space of
human body shapes: reconstruction and
parameterization from range scans. In ACM.
Amberg, B., Romdhani, S., & Vetter, T., 2007. Optimal
step nonrigid icp algorithms for surface registration. In
IEEE.
Anguelov, D., Srinivasan, P., Pang, H. C., Koller, D.,
Thrun, S., & Davis, J., 2005. The correlated
correspondence algorithm for unsupervised
registration of nonrigid surfaces. In Advances in
neural information processing systems.
Arthur, D., & Vassilvitskii, S., 2007. k-means++: The
advantages of careful seeding. In Society for Industrial
and Applied Mathematics.
Bentley, J. L., 1975. Multidimensional binary search trees
used for associative searching. In Communications of
the ACM.
Besl, P. J., & McKay, N. D., 1992. A method for
registration of 3-D shapes. In IEEE Transactions on
pattern analysis and machine intelligence.
Beygelzimer, A., Kakade, S., & Langford, J., 2006. Cover
trees for nearest neighbor. In ACM.
Bookstein, F. L. 1989. Principal warps: Thin-plate splines
and the decomposition of deformations. In IEEE
Transactions on Pattern Analysis and Machine
Intelligence.
Chang, W., & Zwicker, M., 2009. Range scan registration
using reduced deformable models. In Wiley Online
Library.
Greenspan, M., & Godin, G., 2001. A nearest neighbor
method for efficient ICP. In IEEE.
Huang, Q. X., Adams, B., Wicke, M., & Guibas, L. J.,
2008. NonRigid Registration Under Isometric
Deformations. In Wiley Online Library.
Kumar, N., Zhang, L., & Nayar, S., 2008. What is a good
nearest neighbors algorithm for finding similar patches
in images? In Computer Vision–ECCV.
Li, H., Sumner, R. W., & Pauly, M., 2008. Global
Correspondence Optimization for NonRigid
Registration of Depth Scans. In Wiley Online Library.
Liu, Y., Li, L., Xie, X., & Wei, B., 2009. Range image
registration using hierarchical segmentation and
clustering. In IEEE.
Lloyd, S., 1982. Least squares quantization in PCM. In
IEEE Transactions on Information Theory.
Lorensen, W. E., Cline, H. E. 1987. Marching cubes: A
high resolution 3D surface construction algorithm. In
ACM.
Marquardt, D. W., 1963. An algorithm for least-squares
estimation of nonlinear parameters. In Journal of the
society for Industrial and Applied Mathematics.
Non-rigidSurfaceRegistrationusingCoverTreebasedClusteringandNearestNeighborSearch
585

Microsoft Kinect. http://www.microsoft.com/presspass/
presskits/xbox/.
Pauly, M., Mitra, N. J., Giesen, J., Gross, M., & Guibas, L.
J., 2005. Example-based 3D scan completion. In
Eurographics Association.
Rohlfing, T., & Maurer Jr, C. R., 2001. Intensity-based
non-rigid registration using adaptive multilevel free-
form deformation with an incompressibility constraint.
In Medical Image Computing and Computer-Assisted
Intervention–MICCAI.
Rueckert, D., Aljabar, P., Heckemann, R. A., Hajnal, J. V.,
& Hammers, A., 2006. Diffeomorphic registration
using B-splines. In Medical Image Computing and
Computer-Assisted Intervention–MICCAI.
Sumner, R. W., Schmid, J., & Pauly, M., 2007. Embedded
deformation for shape manipulation. In ACM.
Vercauteren, T., Pennec, X., Perchant, A., & Ayache, N.,
2009. Diffeomorphic demons: Efficient non-
parametric image registration. In NeuroImage.
Zhang, Z., 1992. Iterative point matching for registration
of free-form curves and surfaces. In International
journal of computer vision.
APPENDIX
Claim 1: The correspondence computation using cover
tree-based hierarchical clustering reduces the time
complexity of Cluster-based ICP from O(n
2
) to O(n(1-
c
4d
)/(1-c
4
)) where c is the expansion constant of the cover
tree and d is the depth of the sub-tree that corresponds to a
cluster.
Proof:
We know that each node in the cover tree has at most
c
4
children (Beygelzimer et al. 2006). Assume l is the
number of points in the largest cluster. Let’s assume the
worst case, when the constructed cover tree is balanced
and each node has exactly c
4
children. Cutting the cover
tree at level i with k nodes, each cluster contains one root
node of the sub-tree and all its decedent nodes in all the
lower levels from the level i down to the leaves level j. Let
d denote the depth of the sub-tree, i.e. d = j-i. The number
of the nodes in each cluster is calculated as follows: At
level i, d is 0 and each cluster has one root node. The total
number of nodes at level i is (c
4
)
0
=1. At the next level i-1,
d is 1 and each cluster has at most c
4
nodes which are the
children of the root node. The total number of nodes at
level i-1 is (c
4
)
1
= c
4
. As the level decreases by 1, d
increases by 1 and each cluster at each level has at most
(c
4
)
d
nodes. Therefore, the total number of the nodes in a
cluster is calculated using Eq. (1).
Thus, the number of the nodes l in the largest cluster is
upper bounded by (1-c
4d
)/(1-c
4
) and the time complexity
of ICP is upper bounded by O(n(1-c
4d
)/(1-c
4
)) ■.
Figure 1: The registration results of the proposed method for simulated dataset (first row), Kinect-CT dataset (second row),
and CT-CT dataset. The initial source surfaces S (leftmost) were registered to the target surfaces T (3
rd
column) by cluster-
based ICP and non-rigid ICP. The differences between the deformed surface (2
nd
column) and the target were represented to
color-coded error map (4
th
column).
4404142 4
0
4d 4
() () () ...()
(1-c )/(1-c )
d
id
i
cc c c c
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
586
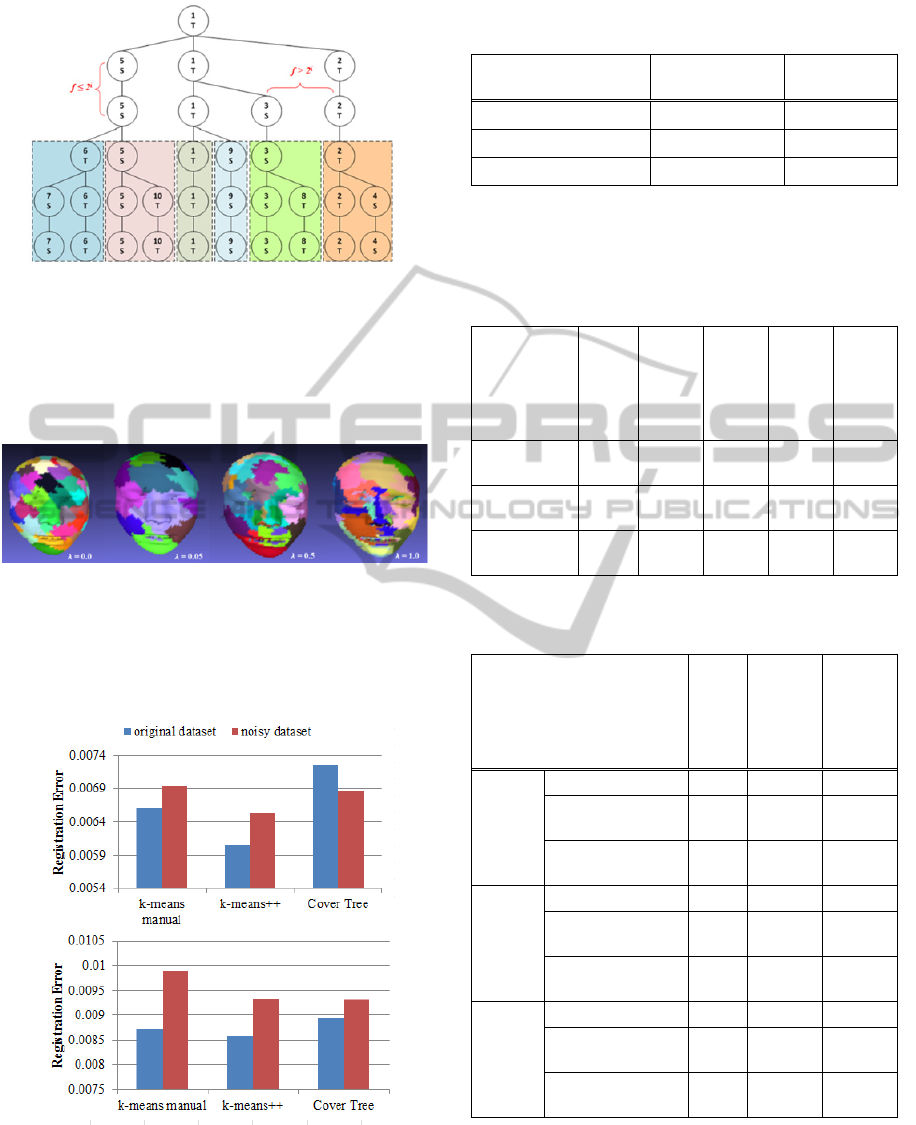
Figure 2: Example of clustering ten points using cover tree.
When we cut the tree at depth equals to 3, the ten points
are clustered into six clusters as indicated by shaded
squares. The points of each cluster correspond to the leaf
nodes of each sub-tree. The number and the character
written in each node indicate the order of insertion and the
original surface that this point belongs to, either T or S.
Figure 3: The effect of the λ weight of the angular term in
the cover tree construction can be shown by clustering at
depth equals to 3 in a face dataset. Left image: Traditional
cover tree constructed with distance only. Three images in
the right: Proposed cover tree construction with distance
and angular term with different λ weights.
Figure 4: The comparison of the registration accuracy
between original and noisy datasets: simulated dataset
(top) and CT-CT dataset (bottom).
Table 1: The number of surface points of the three tested
datasets.
Number of
points in S
Number of
points in T
Simulated CT Dataset 3067 2906
CT-Kinect Dataset 4591 3145
CT-CT Dataset 3145 4076
Table 2: The percentage of the points with negative
Jacobian when applying 4 different non-rigid ICP methods
to three datasets. The proposed method was tested with
and without applying Jacobian term by adjusting the
weighting factor δ.
(unit: %)
Naïve ICP
ICP with k-
means
manual
ICP with k-
means++
ICP with
cover tree
(
δ=0
)
ICP with
cover tree
(
δ=1
)
Simulated
CT Dataset
13.8 10.23 9.83 9.22 8.21
CT-Kinect
Dataset
19.98 15.09 16.67 10.97 11.16
CT-CT
Dataset
6.68 6.75 6.05 5.07 4.61
Table 3: Processing Time of Clustering and
Correspondence Computation.
(unit: sec)
k-means
manual
k-means++
Proposed
clustering
Simulated CT
Dataset
Clustering 2.153 1.857 0.936
Correspondence
(cluster-based ICP)
0.501 0.516 0.577
Correspondence
(non-rigid ICP)
69.68
5
212.645 81.370
CT-Kinect
Dataset
Clustering 1.185 0.921 0.671
Correspondence
(cluster-based ICP)
0.967 0.531 0.530
Correspondence
(non-rigid ICP)
309.5
69
150.104 107.547
CT-CT
Dataset
Clustering 1.560 2.714 0.686
Correspondence
(cluster-based ICP)
0.451 0.313 0.280
Correspondence
(non-rigid ICP)
122.0
40
75.926 78.405
Non-rigidSurfaceRegistrationusingCoverTreebasedClusteringandNearestNeighborSearch
587
