
Deformable Part Model based Multiple Pedestrian Detection for
Video Surveillance in Crowded Scenes
Lu Wang, Xiaoli Ji, Qingxu Deng and Mingxing Jia
College of Information Science and Engineering, Northeastern University, Shenyang, China
Keywords: Deformable Part-based Model, Multiple Pedestrian Detection, Crowd Detection, Video Surveillance.
Abstract: Pedestrian detection is a challenging task for video surveillance. The problem becomes more difficult when
occlusion is prevalent. In this paper, we extend a deformable part-based pedestrian detector to pedestrian de-
tection in crowded scenes by considering both body part detection responses and detections' mutual spatial
relationship. Specifically, we first decompose the full body detector into several body part detectors, whose
detection responses can be computed efficiently from the response of the full body detector. Then, given the
detection responses of the body part detectors, hypotheses are nominated by considering both detection
scores and responses’ mutual spatial relationship. Finally, a local optimization process is applied to make
the final decision, where an objective function encouraging detections with high confidence, high discrimi-
nability and low conflict with other detections is proposed to select the best candidate detections. Experi-
mental results show the effectiveness of the proposed approach.
1 INTRODUCTION
Pedestrian detection is a very important task for
video surveillance. It is difficult due to pose articula-
tions, appearance variations, low figure-ground con-
trast and etc. Recently, significant advance has been
made on detecting well separated individual pedes-
trians through training detectors using statistical
machine learning methods and running the detectors
on the detection window that slides over image posi-
tions and across scale levels (Dollar, 2012). Howev-
er, when applied to the detection of crowds, their
performance degrades significantly due to ambigu-
ous appearance caused by heavy occlusions.
The deformable part-based model (DPM) trained
using latent support vector machine (Felzenszwalb,
2010) has been proved to be one of the most power-
ful object detectors. It runs detection on individual
parts and then sum up the responses to form the final
detection score. DPM has a good potential to apply
to crowd detection because parts can be flexibly
removed from and added to the model to deal with
occlusion. There are some works that apply the
DPM models to deal with occlusion (Ouyang, 2012);
(Shu, 2012); (Yan, 2012). However, (Ouyang, 2012)
and (Shu, 2012) focus on improving the responses in
a detection window without considering detection
responses of neighboring windows; only Yan, 2012
determines the visibility of part by simultaneously
considering the appearance and mutual spatial rela-
tionship. Therefore, the aim of this work is to adapt
a DPM based full body pedestrian detector to crowd
detection in surveillance scenarios by considering
both body part detection responses and detections'
mutual spatial relationship.
In this paper, we assume the camera looks down
onto a ground plane and no camera parameter is
known. Specifically, we first propose to decompose
the original whole body detector trained on the
INRIA pedestrian dataset into several body part
detectors, whose responses are computed efficiently,
and the bias term for each part detector is estimated
from the training data so that the same threshold can
be used to select responses from different body part
detectors. Then, given the detection responses of the
body part detectors, hypotheses that may correspond
to genuine pedestrians are nominated by considering
both detection scores and responses’ mutual spatial
relationship. Finally, a local optimization process is
applied to make the final decision, where an objec-
tive function encouraging detections with high con-
fidence, high discriminability and low conflict with
other detections is proposed to select the best detec-
tions from the mutually overlapped hypotheses.
599
Wang L., Ji X., Deng Q. and Jia M..
Deformable Part Model based Multiple Pedestrian Detection for Video Surveillance in Crowded Scenes.
DOI: 10.5220/0004739105990604
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 599-604
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
For pedestrian detection in crowded scenes, there are
two categories of works. The first category deals
with occlusion from the detector's respect. For ex-
ample, in Wang, 2009, full body detector based on
HOG and LBP is first applied and the classification
score of each block is used to infer whether occlu-
sion occurs and where it occurs. Ouyang et al.,
(2012) designed overlapping body parts and verify
the visibility of a part by the scores of overlapping
parts and the correlation among parts is modeled by
a discriminative deep model. Duan et al., (2010)
proposed a structural filter consists of a set of detec-
tors which is able to infer what parts are visible in a
test window. Shu et al., (2012) designed a DPM
based detector that deals with partial occlusion by
selecting the subset of parts that maximizes the av-
erage score of parts. The disadvantage of this cate-
gory of methods is that the responses of other detec-
tion windows is not considered.
The second category approaches use body part
detectors to nominate a set of candidates and then
perform optimization over an objective function to
select the best candidate subset as the final detection
result. As the number of possible combinations of
candidates is quite large, efficient optimization
method must be developed. For example, Wu, 2005,
(Lin, 2007); (Beleznai, 2009) assumed the occlusion
order is known and used greedy methods for optimi-
zation. Global optimization methods such as Expec-
tation-Maximization (EM) (Rittscher, 2005); (Tu,
2008) and Markov Chain Monte Carlo (MCMC)
(Zhao, 2003); (Ge, 2009) have also been developed.
In Rujikietgumjorn, 2013, the best set of candidates
are determined by applying quadratic programming
to maximize the objective function composed of
unary detection scores and pairwise mutual overlap
constraints. Wang et al. proposed to compromise
greedy optimization and global optimization by
considering a small portion of mutual overlapped
candidates each time (Wang, 2012). In this work, we
apply the optimization strategy similar to Wang,
(2012).
3 THE BODY PART MODELS
The original full body person model we consider in
this work consists of one root filter (F
0
) and eight
body part filters (F
1
, ..., F
8
), as shown in Figure 1(a),
where each green box corresponds to one body part
filter F
i
, and the combination of the gray and green
areas constitute the root filter F
0
. A deformation cost
coefficients d
i
(i=1,...,8) is also defined for each
body part. The features for body part filters are ex-
tracted at twice the resolution of the root filter for
both training and detection.
(a) (b) (c) (d) (e) (f)
Figure 1: Illustration of the body part models: (a) full body
model; (b) upper body model; (c) head shoulder model;
(d) left upper body model; (e) right upper body model; (f)
lower body model.
The score of each detection window is defined
by the location p
0
of the root filter as
max
,…,
,…,
,with
(1)
,,
…,
,
,
∙
,
∑
,
,
,
∙
,
,
,
where p
i
=(x, y, l) specifies a position(x, y) in the l
th
level of the feature pyramid; l
i
= l
0
- λ for i>0 (λ is
the number of levels in an octave of the feature pyr-
amid);
is the feature vector extracted from the
feature pyramid with top-left corner at p
i
;
,
are the deformation features.
To deal with the mutual occlusion exists preva-
lently in crowded scenes, we derive five body part
detectors {D
1
, ..., D
5
} from the full body model, as
shown in Figure 1 (b)-(f), namely the upper body,
the head shoulder, the left/right upper body and the
lower body detectors. Among the five body part
detectors, upper body, head shoulder and lower body
detectors are widely used in crowd detection works
(e.g. Wu, 2005). The left/right upper body parts are
applied here to deal with more severe occlusion
where only one shoulder is visible.
In each derived body part detector D
k
, the consti-
tutional body part filters (green boxes) {F
k,1
,…,
,
} (n
k
<8) are a subset of {F
1
, ..., F
8
}. Similarly,
the deformation coefficients {d
k,1
,…,
,
} are a
subset of {d
1
, ..., d
8
} and the root filter F
k,0
(the
combination of the gray and green areas) is a subar-
ray of F
0
. Thus, similar to Eq. (1), the response
,
of a part detector D
k
at the root filter loca-
tion
,
can be computed by
,
max
,,
…,
,
,,
…,
,
, with
(2)
,,
…,
,
,
∙
,
∑
,
,
,
∙
,
,
,
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
600
which is completely part of the calculation in Eq.
(1), except that the bias b
k
needs to be estimated. To
avoid redundant calculation, an efficient way for
calculating
,
∙
,
for all D
k
's is to: 1) parti-
tion F
0
into subfilters, 2) compute filtering responses
for each resulting subfilter, and 3) sum up the re-
sponses accordingly for each D
k
. To achieve this, we
divide F
0
into a minimum number of 7 subfilters
{
, ...,
} according to the configuration of part
detectors, as shown in Figure 2, which requires the
minimum computational time and the memory space
for saving the responses.
Figure 2: Partition of the root filter F
0
into 7 subfilters for
calculating the part detectors’ root filters.
To estimate the bias term b
k
for each body part
detector D
k
so that the same threshold can be used to
measure responses from different body part detec-
tors, we learn it from the training data similar to the
way proposed in Wang, 2009 as follows.
We revisit the INRIA person data and apply the
full body detector to find the best deformation con-
figuration of parts (i.e. p
1
, ...p
8
given p
0
) on both
positive and negative examples. Then for each ex-
ample, we record the score
∙
∙
,
of each body part i (i = 1, …, 8), as
well as the score
∙
of each subfilter
(q=1, …, 7) of F
0
. Considering the linearity of the
dot product operation, the score f(x) of an example x
can be written as
x
x
,with
(3)
1,…,7
,
8,…,15
,
1,…,7
,
,
8,…,15
and
.
Then, according to Wang, 2009,
can be estimated
by
,
,
, (4)
where
,
(
,
) denotes the i
th
block of the u
th
(v
th
)
positive (negative) example; N
+
(N
-)
is the number of
positive (negative) examples; C is the negative of
the ratio between sum of the positive example scores
and sum of the negative example scores; D equals to
-1/(CN
+
+N
-
). Then the bias b
k
for body part detector
D
k
can be calculated by
∑
|
∈
,
∑
|
∈
,
(5)
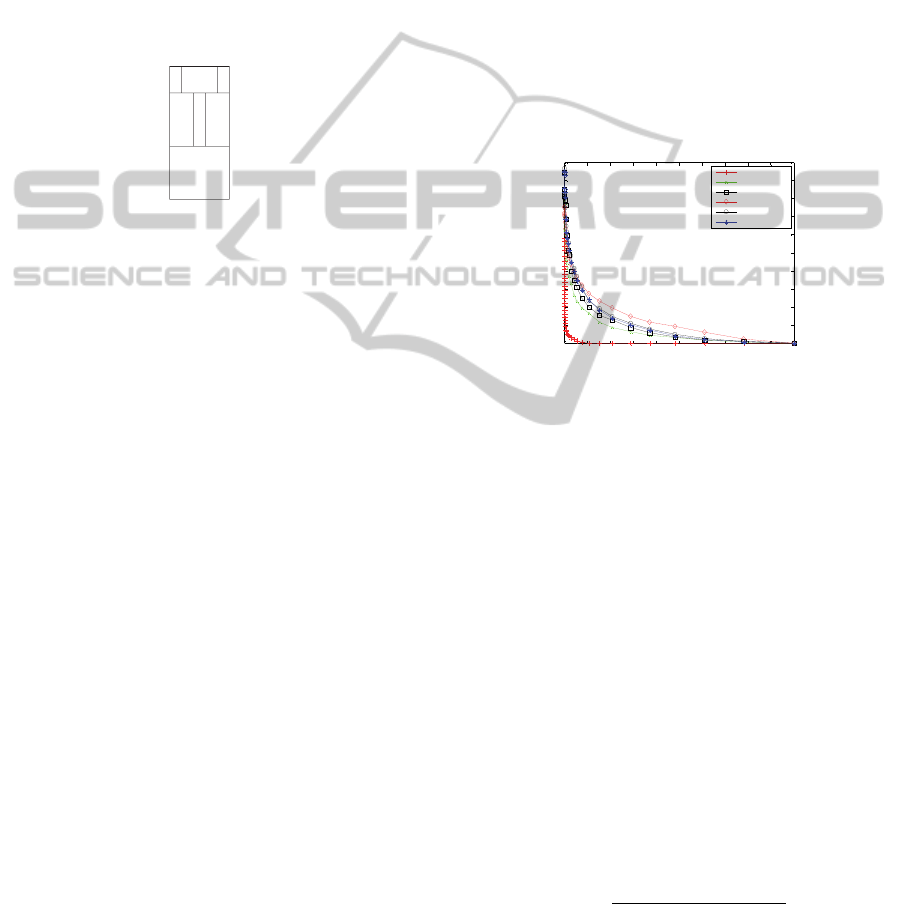
To get a concept of the discriminability of the de-
rived part detectors, the ROC curves of these detec-
tors on the INRIA training data set are shown in
Figure 3. We can see that the discriminability of
body part detectors is significantly lower than that of
the full body detector, and the less number of parts
contained, the lower the detector's discriminability
is. This result can be expected because less infor-
mation is made use of by body part detectors.
Figure 3: The ROC curves of the part detectors' perfor-
mance on the INRIA training data.
4 DETECTION
To find the optimal combination of detection re-
sponses, we first merge responses of the same type
which are likely to correspond to the same pedestri-
an. Then detection scores and responses’ spatial
relationship are considered to further exclude unlike-
ly responses. Finally, a local optimization process is
applied to make the final decision that selects detec-
tions with high confidence, high discriminability and
low conflict with other detections.
To select the likely candidate detections, two
quantities, namely the attraction force F
att
(H, H') and
the exclusion force F
exc
(H,H'), that can describe the
consistency and confliction between any two hy-
potheses H and H’ are calculated. F
att
calculates the
overlapping degree by
,
,
∩
,
,∪′,
,
(6)
where A(H, i) represents the image region occupied
by the i
th
part of H (if H does not contain part i, then
A(H, i) = 0); ∩ and ∪ denote the intersection and
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
false positive rate
false negtive rate
full body
upper body
head shoulder
lower body
left upper body
right upper body
DeformablePartModelbasedMultiplePedestrianDetectionforVideoSurveillanceinCrowdedScenes
601

union of two regions; w
i
is the weight of the i
th
part
and is set to be -
. Two hypotheses with large F
att
are likely to correspond to the same pedestrian. F
exc
is defined as
,
,
∩
,
,
∪
,
,
.
(7)
Two hypotheses with large F
exc
are unlikely to be
true simultaneously.
4.1 Hypotheses Formation
Given a global threshold θ, responses of all the body
part models with detection score greater than θ are
taken as possible hypotheses. To reduce the number
of responses to deal with, non-maximum suppres-
sion is performed for responses from the same detec-
tor by setting the bounding box overlap threshold to
be 0.7 (the threshold is set relatively higher to avoid
missing genuine detections). After that, we further
use F
att
>1.5 as a criterion to merge responses from
the same part detector with bounding box overlap-
ping ratio less than 0.7 but having significant parts
overlap. The advantage of F
att
over bounding box
overlap is that weighted body part overlap is also
taken into account.
To exclude those hypotheses unlikely to be true,
we conduct hypotheses formation as described be-
low.
(1) All the hypotheses produced by the full body
detector are added to the list of hypotheses (LoH)
as they are most reliable.
Figure 4: Definition of the parent detector. The whole
body detector is the parent detector of upper body detector
and lower body detector; the head shoulder detector is the
parent detector of head shoulder, left upper body and right
upper body detector.
(2) A hypothesis nominated by a body part model is
added to LOH if the lacking portion compared
with its parent detector (e.g. for the head shoul-
der detector, the lacking portion is the waist) is
significantly occluded by other hypotheses in
LoH or the image border. Definition of parent
detection is shown is Figure 4.
In our experiment, we found the bottom border of
the image can produce a strong shoulder effect, re-
sulting in false positives when the corresponding
head position has weak edge response. Therefore,
for the head shoulder detector, its detection thresh-
old is set to be 0.2 greater than θ.
4.2 Optimization
Given the list of hypotheses LoH, we use a local
optimization method to make the final decision. In
each iteration of the optimization process, we con-
sider the hypotheses that might be the lowest in
terms of the vertical position together with hypothe-
ses which have significant overlap with them. Then
from these hypotheses, the one that best matches the
criteria is accepted and unqualified hypotheses are
rejected. The optimization process terminates when
all the hypotheses are either accepted or rejected.
Details of this process are described as follows.
Due to occlusion and the lack of scale constraint,
it is not easy to decide which hypothesis is the low-
est. Therefore, we take the hypotheses whose bound-
ing boxes' bottom, or center, or top are the lowest as
possible lowest hypotheses. Then the hypotheses
that overlap significantly with the lowest hypothe-
ses, i.e. F
att
>a (0.2 is used in our experiment), are
also selected for consideration, ensuring that no true
detections are neglected during the optimization.
After that, we choose from them the one that is most
likely to be true according to the following equation
∗
arg max
∑
|
∈
∑
,
∈
(8)
where score(H) is the detection score of hypothesis
H, D(H) is the type of the body part detector of H,
and C
acc
represents the set of accepted hypotheses.
Eq. (8) selects the hypothesis with higher score,
more parts (meaning higher discriminability), and
less conflict with other accepted hypotheses. From
our experiment, Eq. (8) makes correct decisions in
most cases. However, sometimes a hypothesis with
good confidence may be missed by (8) due to the
smaller number of parts it contained. Therefore, we
further consider the hypotheses whose tops are lower
than H* and meanwhile with detection scores greater
than H*, and choose the best one from them accord
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
602
ing to Eq. (8) again.
The hypothesis H* chosen above is accepted and
added to C
acc
except for the following two cases:
(1) It has less than two basic parts visible or its head
is invisible. This is to ensure that the accepted
hypothesis has enough visible ratio to support its
existence.
(2) It is a body part detector D
k
's response, and
meanwhile body parts of its parent detector D
j
in
the same detection window p are all visible but
with detection score S
j
(p) <θ. This is the case
that the occlusion information is not sufficient to
explain the existence of the part detector re-
sponse.
5 EXPERIMENTAL RESULTS
We evaluate the performance of our proposed ap-
proach on two data sets, i.e. CAVIAR
(http://homepages.inf.ed.ac.uk/rbf/CAVI-RDATA1)
and PETS 2009 (http://www.cvg.rdg.ac.uk/PETS20-
09/a.html). We select the crowded sequence
OneStopMoveEnter1cor (1590 frames with resolu-
tion being 384288) from the CAVIAR data set,
and the S2L1_1 sequence (221 frames with resolu-
tion being 768576) from the PETS 2009 data set,
as the testing data. We compare the performance of
our proposed approach with two deformable part
based person detectors trained using Latent SVM
(Felzenszwalb, 2010). The first one is the full body
detector from which we derive our approach, and the
second one is a mixture of separately trained full
body and body part detectors (the part detectors are
the upper body and head shoulder detectors), and is
trained on the VOC2007 person dataset. Both detec-
tors are provided online (http://www.cs.uchicago.
edu/~pff/latent/).
All the three detectors need to perform nonmax-
imum suppression, in which the bounding box over-
lap threshold needs to be determined. We set this
parameter to be 0.7 for our approach as stated above.
For the other two detectors, we experimentally select
the optimal overlap threshold for them and the re-
sulting parameter is 0.6 for the INRIA full body
model and 0.5 for the VOC2007 body part model.
The detection performance evaluation criterion
used is the commonly applied intersection over un-
ion greater than 0.5, under the constraint that the
detection and the ground truth are in one to one cor-
respondence.
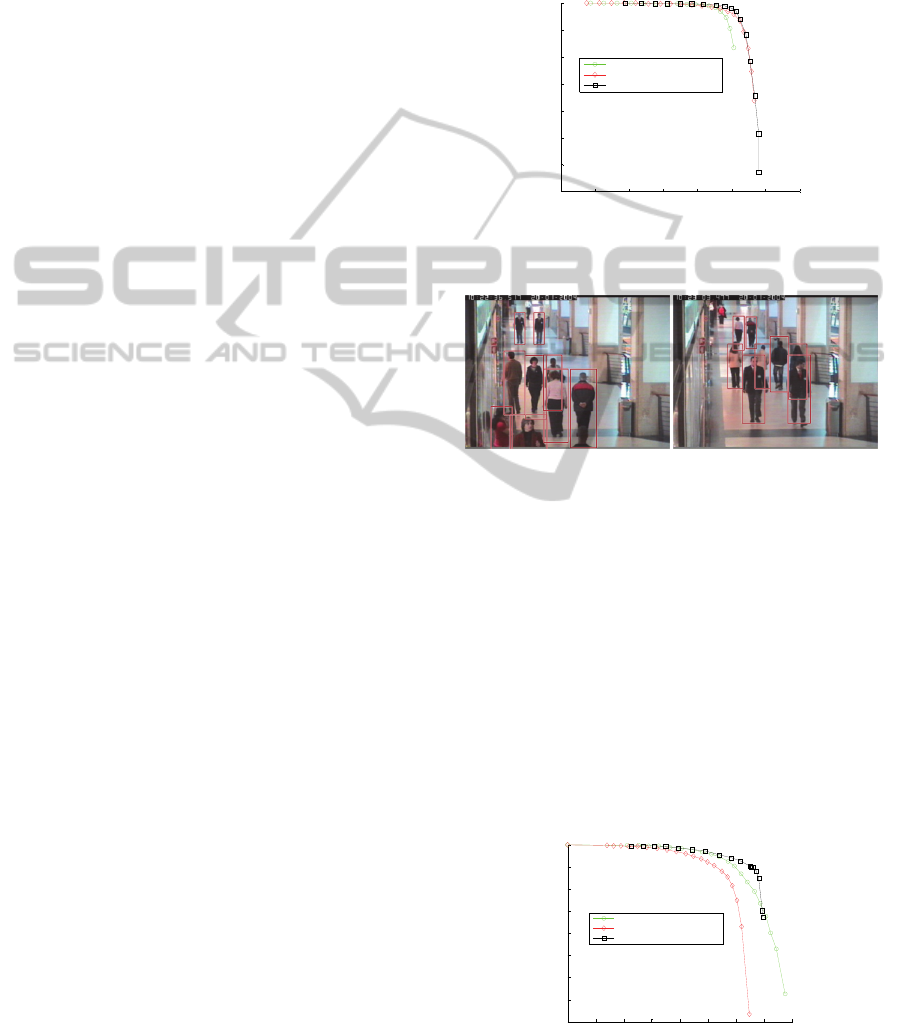
Figure 5 shows the recall-precision curves of the
three detectors on the CAVIAR data set, from which
we can see that our proposed approach consistently
outperforms both detectors because of the applica-
tion of body part detectors while performing occlu-
sion reasoning at the same time. Figure 6 illustrates
some examples of the detection results of our ap-
proach when the threshold is set to be 0.
Figure 5: The precision-recall curves of the three detectors
on the tested Caviar sequence.
..
Figure 6: Illustration of the detection results of the pro-
posed approach on the Caviar data set.
Figure 7 demonstrates the performance of the
three detectors on the PETS 2009 data set. It can be
seen that the body part model performs the worst,
whereas our proposed approach gives better result
when the recall rate is less than 0.7. The reason that
the performance of our approach at high recall rate is
not satisfactory is that if two detections share many
parts, although their bounding box do not overlap
significantly, we take the two detections as conflict-
ing, discarding more true positives when body parts
are not accurately localized whereas the non-
maximum suppression applied by the full body
model does not do this action.
Figure 7: The precision-recall curves of the three detectors
on the tested PETS 2009 sequence.
0.4 0.5 0.6 0.7 0.8 0.9 1
0.4
0.5
0.6
0.7
0.8
0.9
1
recall
precision
full body model
separately trained body part model
proposed
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
recall
precision
full body model
separately trained body part model
proposed
DeformablePartModelbasedMultiplePedestrianDetectionforVideoSurveillanceinCrowdedScenes
603

Figure 8 illustrates some examples of the detec-
tion results of our approach on the PETS 2009 data
set when the threshold is set to be 0.
Figure 8: Illustration of the detection results of the pro-
posed approach on the PETS 2009 data set.
For each frame, our proposed approach takes
about 15% more time to calculate the part detection
scores than the full body detector, whereas the com-
putational time for the hypotheses formation and
optimization is quite short and can be neglected. The
VOC 2007 body part model cost more than twice the
time cost by our approach, due to that body part
filters are not well shared among different body part
detectors.
6 CONCLUSIONS
We have developed an approach to adapting the
deformable part based pedestrian detector to crowd-
ed scenes by considering both body part detection
responses and detections' mutual spatial relationship,
without enforcing much additional computational
overhead through part response sharing, while im-
proving the detection results significantly.
Our future wok includes enriching the part detec-
tors with higher discriminability; estimating the
pedestrians' size distribution over the image online
so that size constraint can be enforced on the detec-
tion of future coming frames; designing an efficient
global optimization method that considers both con-
flicts between overlapping visible parts and detec-
tion scores so that decisions can be made more
properly.
ACKNOWLEDGEMENTS
This work is supported by National Natural Science Foun-
dation of China 61202258, Program for New Century
Excellent Talents in University of China NCET-09-0071,
and National Science and Technology Support Program of
China 2013BAK02B01-02.
REFERENCES
Beleznai, C., Bischof, H., 2009. Fast human detection in
crowded scenes by contour integration and local shape
estimation. In CVPR, pp. 2246-2253.
Duan, G., Ai, H., Lao, S., 2010. A Structural Filter Ap-
proach to Human Detection. In ECCV, pp. 238-251.
Dollar, P., Wojek, C., Schiele, B., Perona, P., 2012. Pedes-
trian detection: an evaluation of the state of the art.
TPAMI vol. 34, pp. 743-761.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., Ra-
manan, D., 2010. Object Detection with Discrimina-
tively Trained Part-Based Models. TPAMI, vol. 32, pp.
1627-1645.
Ge, W., Collins, R., 2009. Marked point processes for
crowd counting. In CVPR, pp. 2913-2920.
Lin, Z., Davis, L. S., Doermann, D., DeMenthon, D., 2007.
Hierarchical part-template matching for human detec-
tion and segmentation. In CVPR, 2007, pp. 1-8.
Ouyang, W., Wang, X., 2012. A discriminative deep mod-
el for pedestrian detection with occlusion handling. In
CVPR, pp. 3258-3265.
Rittscher, J., Tu, P. H., Krahnstoever, N., 2005. Simulta-
neous estimation of segmentation and shape. In CVPR,
pp. 486-493.
Rujikietgumjorn, S., Collins,R. T., 2013. Optimized pe-
destrian detection for multiple and occluded people. In
CVPR.
Shu, G., Dehghan, A., Oreifej, O., Hand, E., Shah, M.,
2012. Part-based multiple-person tracking with partial
occlusion handling. In CVPR, pp. 1815-1821.
Tu, P., Sebastian, T., Doretto, G., Krahnstoever, N.,
Rittscher, J., Yu, T., 2008. Unified crowd segmenta-
tion. In ECCV.
Wang, L., Yung N. H. C., 2012. Three-dimensional mod-
el-based human detection in crowded scenes. TITS,
vol. 13, pp. 691-703.
Wang, X., Han, T., Yan, S., 2009. An HOG-LBP human
detector with partial occlusion handling. In CVPR, pp.
32-39.
Wu, B., Nevatia, R., 2005. Detection of multiple, partially
occluded humans in a single image by Bayesian com-
bination of edgelet part detectors. In CVPR, pp. 90-97.
Yan, J., Lei, Z., Yi, D., Li, S. Z., 2012. Multi-pedestrian
detection in crowded scenes: a global view. In CVPR,
pp. 3124-3129.
Zhao, T., Nevatia, R., 2003. Bayesian human segmenta-
tion in crowded situations. In CVPR, pp. 459-466.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
604
