
Automatic Analysis of In-the-Wild Mobile Eye-tracking Experiments
using Object, Face and Person Detection
Stijn De Beugher
1
, Geert Brˆone
2
and Toon Goedem´e
1
1
EAVISE, ESAT, KU Leuven, Leuven, Belgium
2
MIDI Research Group, KU Leuven, Leuven, Belgium
Keywords:
Mobile Eye-tracking, Object Detection, Object Recognition, Real World, Data Analysis, Person Detection.
Abstract:
In this paper we present a novel method for the automatic analysis of mobile eye-tracking data in natural envi-
ronments. Mobile eye-trackers generate large amounts of data, making manual analysis very time-consuming.
Available solutions, such as marker-based analysis minimize the manual labour but require experimental con-
trol, making real-life experiments practically unfeasible. We present a novel method for processing this mobile
eye-tracking data by applying object, face and person detection algorithms. Furthermore we present a temporal
smoothing technique to improve the detection rate and we trained a new detection model for occluded person
and face detections. This enables the analysis to be performed on the object level rather than the traditionally
used coordinate level. We present speed and accuracy results of our novel detection scheme on challenging,
large-scale real-life experiments.
1 INTRODUCTION
The development of mobile eye-tracking systems has
opened up the paradigm of eye-tracking to a wide va-
riety of research disciplines and commercial appli-
cations. Whereas traditionally, the analysis of eye
gaze patterns was largely confined to controlled lab-
based conditions due to technological restrictions (i.c.
obtrusive hardware restricting the flexibility of use
and potential research questions), mobile systems al-
low for eye-tracking in the wild, without a necessar-
ily predefined set of research conditions. Because
of this increased flexibility, research into visual be-
haviour and real-life user experience now extends to
natural environments such as public spaces (train sta-
tions, airports, museums, etc.), commercial environ-
ments (supermarkets, shopping centers, etc.) or to
interpersonal communicative settings (helpdesk inter-
actions, lectures, face-to-face communication, etc.).
A mobile eye-tracker, as illustrated in figure 1, com-
bines two types of cameras. The scene camera is
looking forward and captures the field of view, while
the eye-camera(s) on the other hand capture the eye-
movements, also known as gaze data. Output of such
an eye-tracker,as shown in the right part of this figure,
consists of the images captured by the scene camera
with the gaze-locations laid on top of them.
One of the key challenges for this new type
Figure 1: Left: illustration of a mobile eye-tracker consist-
ing of a scene camera and an eye camera. Right: output of
a mobile eye-tracker in which the data of the scene camera
and the captured gaze point (green dot) are combined.
of pervasive eye-tracking, and mobile eye-tracking in
general, is the processing of data generated by the sys-
tems. By abandoning the traditional well-controlled
lab-based conditions, the data stream generated by the
eye-trackers becomes highly complex, both in terms
of the objects and scenes that are encountered, and the
gaze data that need to be analyzed and interpreted.
How can researchers avoid the painstaking task of
manually coding large amounts of data, which is ex-
tremely time-consuming, without losing the full po-
tential of mobile eye-tracking systems?
Eye-trackingexperimentsare mostly performed in
order to measure how often and for how long the test
subjects looked at a specific object and/or at persons,
to gather information about what ’catches the eye’ in
a certain setting. Recently, several solutions to the
analysis problem have been proposed, some of which
have been integrated in commercially available sys-
625
De Beugher S., Brône G. and Goedemé T..
Automatic Analysis of In-the-Wild Mobile Eye-tracking Experiments using Object, Face and Person Detection.
DOI: 10.5220/0004741606250633
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 625-633
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tems, see (Evans et al., 2012) for an overview. The
best-known technique is the use of markers to prede-
fine potential Areas Of Interest (AOI). These systems,
which either use physical infrared markers (e.g. Tobii
Glasses) or natural markers (e.g. SMI Eye Tracking
Glasses), determine the boundaries of the Areas Of
Analysis (AOA), generating a two-dimensional plane
within which eye gaze data can be collected for longer
stretches of time and generalized across subjects. The
output of this type of analysis is often represented in
heat maps or opacity maps that highlight the zones
within the AOA that received most visual attention
(measured in terms of visual fixations and fixation
times). Despite their advantages in comparison to
manual analysis, marker based systems suffer from
a range of limitations, as discussed in (Brˆone et al.,
2011) and (Evans et al., 2012), including the need for
fixed positions of relevant objects to be tracked, and
the sensitivity to the observer’s position. These short-
comings impose limitations on the efficient use of
(mobile) eye-tracking in real-life settings with mov-
ing subjects, objects and a dynamic environment.
This paper presents an alternative to the AOI-
based methods, building on recent studies combin-
ing object recognition algorithms with eye-tracking
data (De Beugher et al., 2012), (Toyama et al., 2012)
and (Yun et al., 2013). By mapping gaze data on ob-
jects and object classes to be recognized in the scene
video data, a number of restrictions of AOI-based ap-
proaches no longer hold, including the need to work
with predefined static areas. Objects for which gaze
data statistics need to be generated can be selected in
the actual videostream, without prior training. The
schematic representation in figure 2 shows the detec-
tion methods that were used in our approach to gener-
ate both graphical and statistical output.
The next section illustrates potentional real-life
applications of our approach. In section 3 we dis-
cuss the technological background of the proposed
approach, including a comparison of different poten-
tial feature extraction methods and an overview of
face and body detection algorithms. In section 4 we
will clarifiy our technical approach and in section 5
we report on our experiments.
2 TARGETED APPLICATIONS
In order to show the potential of our object-based eye-
tracking data analysis, we detail a selection of real-
world applications that can serve as both a test case
and a show case for our technique: user experience,
market research and (psycho)linguistics.
Figure 2: High-level overview of the approach. Output is
generated in the form of both a visual summary of the eye-
tracker data and statistical information.
2.1 Market Research
Our first case study focuses on the analysis of eye-
tracker data recorded during a shopping experiment.
We have chosen this case because there has been
a substantial interest in eye-tracking for shopper re-
search for several years. Indeed, these experiments
yield an objective measurement of how well prod-
ucts catch the eye in a shop. Market researchers and
(brand) developers benefit from insights into the ef-
fect of package design, shelf placement, and store
planning on shopper experience. The specific con-
text of a supermarket presents a series of challenges,
for example a multitude of objects with different
shapes and colors, products presented in groups on
the shelves or products within the same range exhibit-
ing similar features. As explained in the introduction,
the limitations of using predefined areas of analysis
makes it virtually impossible to process large-scale
shopping experiments.
Our proposed object recognition method on the
other hand, allows for a fast analysis of multiple ob-
jects and object categories. For instance, once the sys-
tem has been trained for a specific product, it will rec-
ognize this product type each time it appears within
the visual field of a test person walking through a shop
and even picking up those products.
The main advantage of our system, compared to
the marker-based methods, is that we no longer re-
quire predefined areas of analysis, making it possi-
ble to perform eye-tracker experiments in larger, real-
world shopping environments.
2.2 Customer Journey
A prominent field of application for mobile eye-
tracking is customer journey analysis. The main pur-
pose of customer journey research of a company is
gaining insights into the experience of customers.
Mobile eye-trackers provide potentially useful infor-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
626

mation on customer experience, particularly when the
paradigm is combined with other sensors, such as
wearable EEG devices (Alves et al., 2012).
Customer experiencecan be measured through us-
ing so called touchpoints, the contact moments be-
tween the customer and the company e.g. in the case
of advertising, communication with desk members,
etc. The recordings of the mobile eye-tracker can be
used to analyse the visual behaviour towards the fysi-
cal and human touchpoints. Our approach can be used
to perform these analysis automatically.
In our case study we tackle the analysis of one
type of customer journey involving a series of touch-
points, namely a museum visit (see section 5.3).
Analysis of this data includes wayfinding analysis,
analysis of human contacts, visual behaviour towards
specific works of arts, etc.
2.3 Human-human Communication
A third example application tackles the analysis of
eye-tracker data of a human-human communication
experiment. Recent research on multimodal human-
human communication has explored the role of gaze
in turntaking and feedback in face-to-face conversa-
tion (Jokinen et al., 2009), shared gaze in dialogue
and the function of gaze as a directive instrument
in communication (Brˆone et al., 2010). Among the
questions that are addressed in this field are: Does
a speaker visually address his/her audience during a
presentation? How does the audience divide its visual
attention between a speaker and relevant artefacts?
In this case, the specific challenge for the object-
based eye-tracking system resides in the recognition
of human bodies (and body parts), and the automatic
analysis of attentional distribution between multiple
objects. This test will allow for a first insight into
the system’s reliability for the analysis of preferential
looking in communication (e.g. a speaker looking at
audience vs. notes).
3 RELATED WORK
In the introduction, we already mentioned the con-
cepts object recognition and object detection. The
task of object recognition consists of retrieving a
given object that is identical to a trained object in a
set of images. Object detection on the other hand
has extended the principle of detecting objects with a
known specific appearance towards detecting objects
based on a general object class model that contains
intra-class variability. The next subsections describe
a selection of techniques of both object recognition
and object detection that can be used in our applica-
tion.
3.1 Object Recognition Techniques
Object recognition, or finding an object that is iden-
tical to a trained one, is traditionally done with lo-
cal feature matching techniques. Recognition meth-
ods define local interest regions in an image, based on
specific features of the image content, which are de-
scribed with descriptor vectors. The characterisation
of these local regions with descriptor vectors that are
invariant to changes in illumination, scale and view-
point enables the regions to be compared across im-
ages. A survey of object recognition methods is given
in (Tuytelaars and Mikolajczyk, 2008), while (Miko-
lajczyk et al., 2005) report comparative experiments.
Renowned techniques are the Scale Invariant Fea-
ture Transform (SIFT) (Lowe, 2004) and Speeded
Up Robust Features (SURF) by (Bay et al., 2006).
Although SIFT and SURF are regarded as state-
of-the-art, we opted for a class of more recently
developed techniques due to licensing regulations.
We compared two competitive alternatives for SIFT
and SURF, namely ORB (Rublee et al., 2011) and
BRISK (Leutenegger et al., 2011).
The ORB feature descriptor is built on the well-
known FAST keypoint detector (Rosten and Drum-
mond, 2005) and the recently developed BRIEF de-
scriptor (Calonder et al., 2010). ORB is a compu-
tationally efficient replacement for SIFT and SURF,
it has similar matching performance and is even less
affected by image noise. ORB is suitable for real-
time performance since it is faster than both SURF
and SIFT. Another competitive approach to keypoint
detection and description is Binary Robust Invariant
Scalable Keypoints (BRISK) and is as performant as
the state-of-the-art algorithms, but with a significantly
lower computational cost.
An evaluation of these detectors is presented
by (Miksik and Mikolajczyk, 2012). Although these
results demonstrate that BRISK outperforms ORB,
we chose to use ORB in our algorithm based on
our own experiments. Mobile eye-trackers are often
equipped with low-resolution scene cameras, for ex-
ample 320 by 240 px on the Arrington mobile eye-
tracker. Moreover, on top of this low resolution we
are only interested in a specific region around the gaze
cursor, yielding a final ROI of approximately 120 by
120 px. We noted that applying BRISK to such small
images often results in an insufficient number of ex-
tracted keypoints as shown in figure 3, and thus does
not generate an adequate number of matches.
AutomaticAnalysisofIn-the-WildMobileEye-trackingExperimentsusingObject,FaceandPersonDetection
627
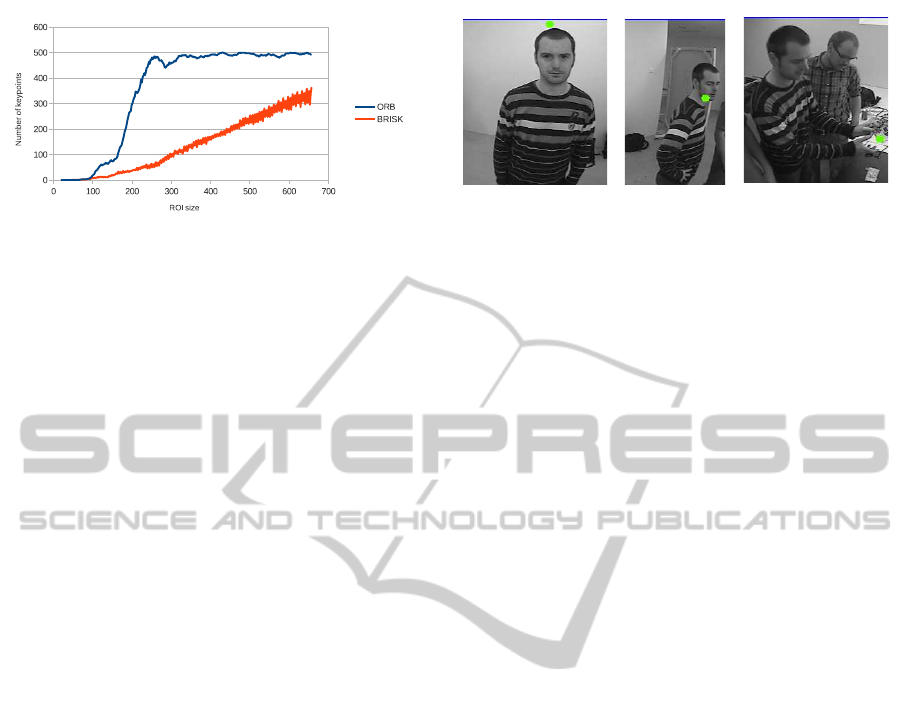
Figure 3: Comparison between ORB and Brisk. X-axis is
value of both width and height of the image.
3.2 Object Detection Techniques
Several studies in the field of visual behaviour have
shown that visual attention is particularly attracted to
other persons (Judd et al., 2009; van Gompel, 2007)
and faces (Henderson, 2003). To broaden the use of
our approach we implemented techniques to automat-
ically detect whether a person looked at another per-
son. We make a distinction between specifically look-
ing at a face, e.g. during talking, and looking at some-
one from a larger distance.
Since each body or face is unique it is impossible
to apply the previously mentioned object recognition
techniques. Object detection on the other hand can be
described as detecting instances of objects of a certain
class, in which the appearance of objects may vary,
such as humans or faces, and therefore it is suitable
for this purpose. A short overview of two robust ob-
ject detection algorithms is described below.
The technique presented by (Viola and Jones,
2001) has proven to be a very useful tool to detect
faces in natural images. This technique combines a
set of weak classifiers into a final strong classifier and
uses a sliding window approach to search for specific
patterns in the image. Haar features models can be
used to detect faces, eyes or mouths, etc. A main
drawback of this technique is the limited viewing an-
gle for which standard models can be used.
On the other hand, for full human bodies a state-
of-the-art detectors are the Deformable Parts Model
(DPM) (Felzenszwalb et al., 2010), Integral Chan-
nel Features (Doll´ar et al., 2009) or Random Hough
Forests (Gall and Lempitsky, 2009). This technique
uses a parts extension of HOG (Dalal and Triggs,
2005), and is therefore invariant to various postures
or viewing angles. Models trained on the PASCAL
and INRIA Person datasets have proven to be very
robust in cases where a full body is visible, but some-
times fail when a body is not visible from head to
foot (Doll´ar et al., 2012). Unfortunately, since the
scene camera of the eye-tracker has a restricted ver-
tical viewing angle, people not too far away appear
cropped in the image, as illustrated in figure 4. In
Figure 4: Example eye-tracker images in which a complete
human body is not visible from head to foot.
eye-tracking experiments we are often interested in
the interaction between people and thus we capture
lots of such images.
To summarize this section we conclude that we se-
lected ORB to detect if one looked at specific objects.
To find out if one looked at another person we chose
Viola and Jones and DPM based algorithms.
4 TECHNICAL APPROACH
The input of our algorithm consists of a videostream,
captured by the scene camera of an eye-tracker, and a
data file which contains the corresponding gaze loca-
tions. As explained in the previous chapter, we apply
two different techniques to analyse the eye-tracking
data. The first part of this section discusses the imple-
mentation of the ORB technique to detect how often
and for how long a particular object was viewed. The
second part handles the implementation of techniques
to count how often and for how long a face or a person
was viewed.
4.1 Recognition of Specific Objects
This part of our approach focuses on how we process
eye-tracker data to generate basic statistics for spe-
cific objects to be detected. This is done in five steps:
1. Preprocessing step: since we are only interested
in the objects that appear close to the visual fixa-
tion point, the input images of the forward looking
camera are cropped around the gaze coordinates.
Based on experiments, we chose to crop a ROI of
120 by 120 px around the gaze cursor.
2. In the next step the user selects objects of in-
terest in the datastream by simply clicking on
them while the video is playing. These ob-
jects are then stored in an object database, avoid-
ing the tedious task of manually creating such
a database with training images of the objects,
as proposed in other approaches (Toyama et al.,
2012; De Beugher et al., 2012).
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
628
3. The third step consists of searching for correspon-
dences between each cropped frame and each
frame stored in the database, using ORB features.
We apply a matching algorithm, based on the Eu-
clidean distance to find similar keypoints between
each image pair. Furthermore we also apply
several filter techniques to eliminate weak or
false matches. First the distance between the two
best matches is evaluated: if this distance is large
enough it is safe to accept the first best match,
since it is unambiguously the best choice. Sec-
ondly, a symmetrical matching scheme is used,
which imposes that for a pair of matches, both
points must be the best matching feature of the
other. The last step involves a fundamental matrix
estimation method based on RANSAC (Fischler
and Bolles, 1981) to remove the outliers. This
approach ensures that when we match feature
points between two images, we only keep those
matches that fall onto the corresponding epipolar
lines.
4. In the fourth step we assign a score S to each pair
of images:
S =
m
∑
i=1
d(k
i
, k
′
i
)
m(
m
∑
i=1
A(k
i
) +
m
∑
i=1
A(k
′
i
))
, (1)
where k
i
and k
′
i
stands for the ith keypoint of the
corresponding images, m is the total number of
matches and A(k
i
) stands for the size of the cor-
responding features. This score S is then used to
decide whether a cropped frame exhibits sufficient
agreement to one of the frames in the database by
comparing S to a tunable threshold.
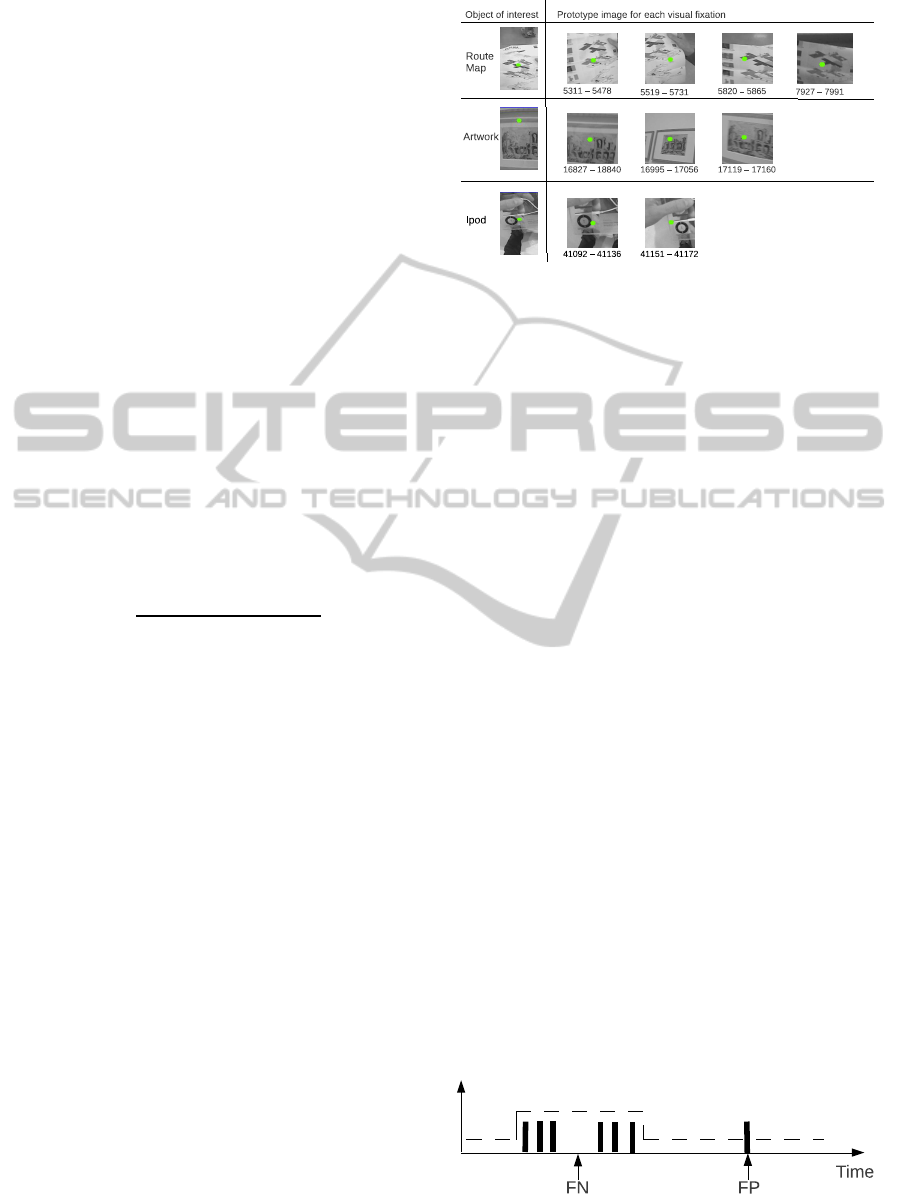
5. In the fifth and final step we cluster consecutive
similar frames into a ”visual fixation”. We define
a visual fixation as a series of images in which the
same object was viewed with a minimal duration
of 100 ms or three consecutive frames. This min-
imal length factor allows us to remove many false
detections.
An example result of this algorithm is shown in fig-
ure 5. A total of four objects were selected from an
eye-tracker experiment. In this figure we display a
single image per visual fixation for each frame of in-
terest.
4.2 Detection of Faces and Bodies
The second part of our approach focuses on the detec-
tion of faces and human bodies as it is nessecary for
Figure 5: Results of the object detection algorithm. First
and last frame number of each visual fixation is displayed.
e.g. customer journey experiments (see section 2.2).
As explained in the previous chapter, we use the
standard Viola and Jones technique for face detec-
tion in combination with the standard OpenCV frontal
face Haar-cascade model and the standard DPM tech-
nique (Felzenszwalb et al., 2010) in combination with
a new trained 60% model, as will be explained below.
We apply those techniques to the images captured by
the scene camera of the eye-tracker, but we only keep
the bounding boxes that are close to the gaze coordi-
nates of the corresponding frame.
This basic implementation performs sufficiently
well, but there is still room for improvement. We pro-
pose a temporal smoothing technique (see figure 6)
by using the gaze-data to improve the detection rate,
thus minimizing both false positives and false nega-
tives. To reduce the number of false positives, we as-
sume that a valid face/person detection should stand
for at least a certain time (tunable via a threshold, for
example 100 ms or 3 subsequent frames). This cri-
terion substantially reduces the number of false posi-
tives (since many false detections occur occasionaly).
On the other hand, if we find gaps between detection
sequences, we can assume those are missing detec-
tions. Predicting them will improve the detection rate
and thus further reduce the number of false negatives.
The Haar-cascade method works best for frontal
faces, which is ideally suited for this application
where we want to count face-to-face interactions.
However if a face is presented in profile, detection
will often fail. There are some models designed for
profile face detection, but we saw little or no advan-
Figure 6: Vertical bars: real detections. Dashed line: output
of the temporal smoothing.
AutomaticAnalysisofIn-the-WildMobileEye-trackingExperimentsusingObject,FaceandPersonDetection
629
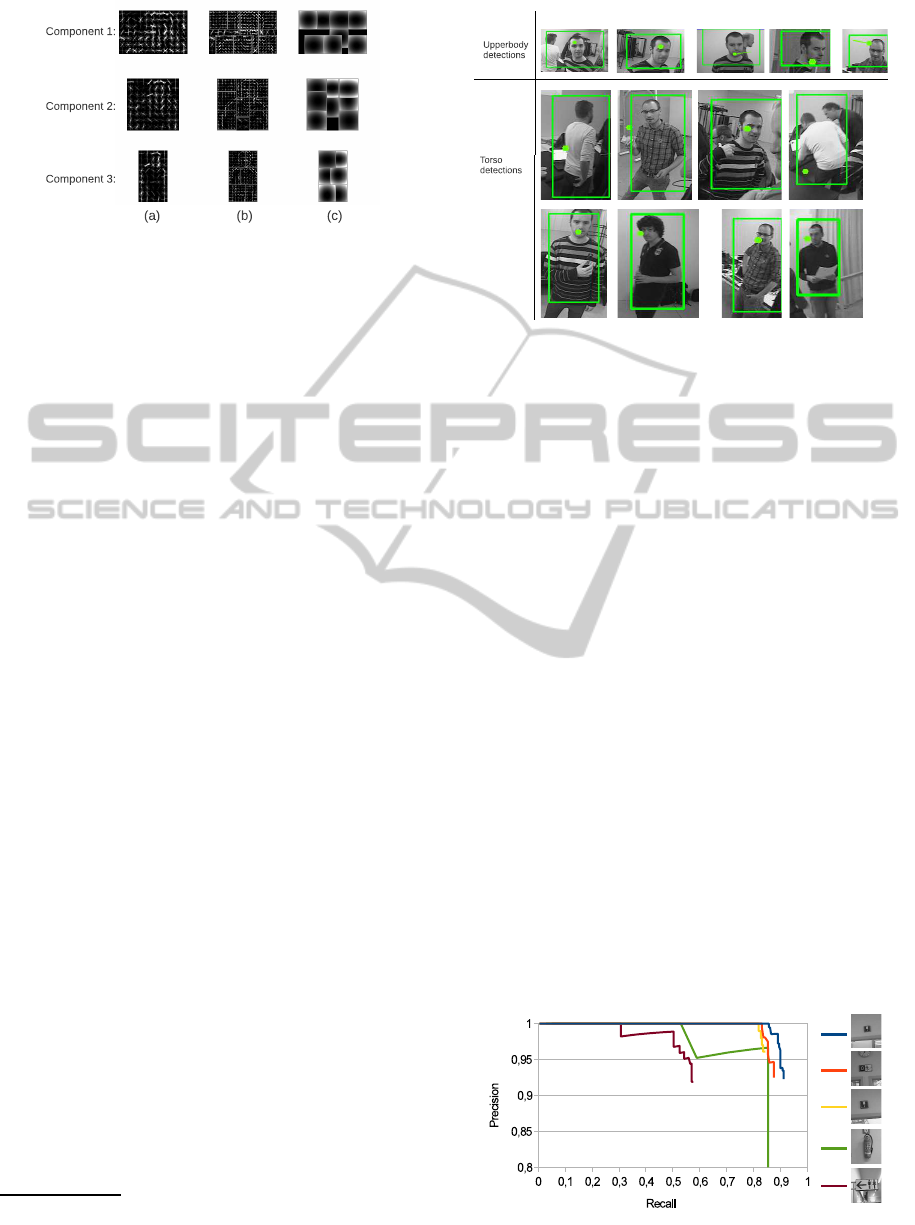
Figure 7: Components of the torso model.
tage with this as compared to the standard frontal face
model. The DPM is very robust in the detection of
full bodies, but because in our application persons are
mostly not visible from head to foot (see figure 4), we
used a self-trained torso model instead of the standard
person model.
To overcome these shortcomings, we have trained
a new model based on the standard PASCAL VOC
dataset
1
. This new model is trained using only the
upper 60% of the labeled bounding boxes of human
bodies, resulting in a human torso model as illustrated
in figure 7. Our model consists of three components,
each belonging to a specific viewpoint. Every compo-
nent is defined by a root filter (a), several part filters
(b) and a spatial model for the location of each part
relative to the root (c). This approach to cope with
image border occlusion is also followed by (Mathias
et al., 2013), but for a channel features detector. To
the best of our knowledge, we are the first to use it on
a DPM-detector. A second advantage of this cropped
model is the possibility to use the first component
as an upper body (head and shoulder)-detector. This
model is, compared to the Haar-cascade model, robust
to various poses of the head.
5 EXPERIMENTAL RESULTS
In order to test our person and object detection
scheme on real-life eye-tracker experiments, we
recorded a large set of eye-tracking experiments.
These experiments included (i) a subject walking
through a university campus building and looking for
signs, (ii) a subject walking through the streets, while
paying attention to traffic and other signs, (iii) a sub-
ject attending a presentation given by a lecturer and
(iv) a larger experiment where multiple participants
visited a museum. In this last experiment fourteen
participants (7 male - 7 female) were recorded while
1
The PASCAL Visual Object Classes Challenge
2009 (VOC2009) Dataset http://www.pascal-network.org/
challenges/VOC/voc2009/workshop/index.html
Figure 8: Example of the full body person detection.
they visited a special exhibition at Museum M in Leu-
ven (Belgium), starting from the ticket counter all the
way to the gift shop. The goal of this experiment
was to determine the ease-of-use and experience of
the self-guided tour: signage, information, view time
of specific works, etc. Recordings were made with
Tobii Glasses and Arrington Gig-E60 mobile systems
and resulted in 630 minutes of video material.
5.1 Object Recognition Results
We tested our object recognition technique on a
labeled set of images, captured during the above-
mentioned experiment (i). This set consists of 2000
images with 716 labeled objects of six different cate-
gories. A precision-recall curve indicating the perfor-
mance of our detector on this test set is shown in fig-
ure 9. The obtained detection results are satisfactory
for most of the objects. However, a large scale vari-
ance results in a lower detection rate, as illustrated by
the curve of the toilet sign, which is looked at both
from very far away and from close by. Table 1 shows
the execution time for a given number of selected ob-
jects of interest and a given number of video frames.
As illustrated in this table, data of an eye-tracker ex-
periment of 6000 frames (3m 20s of video data) can
be processed in a couple of minutes, less than the du-
Figure 9: Precision-recall curve of our object recognition
technique tested on a set of 2000 images.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
630
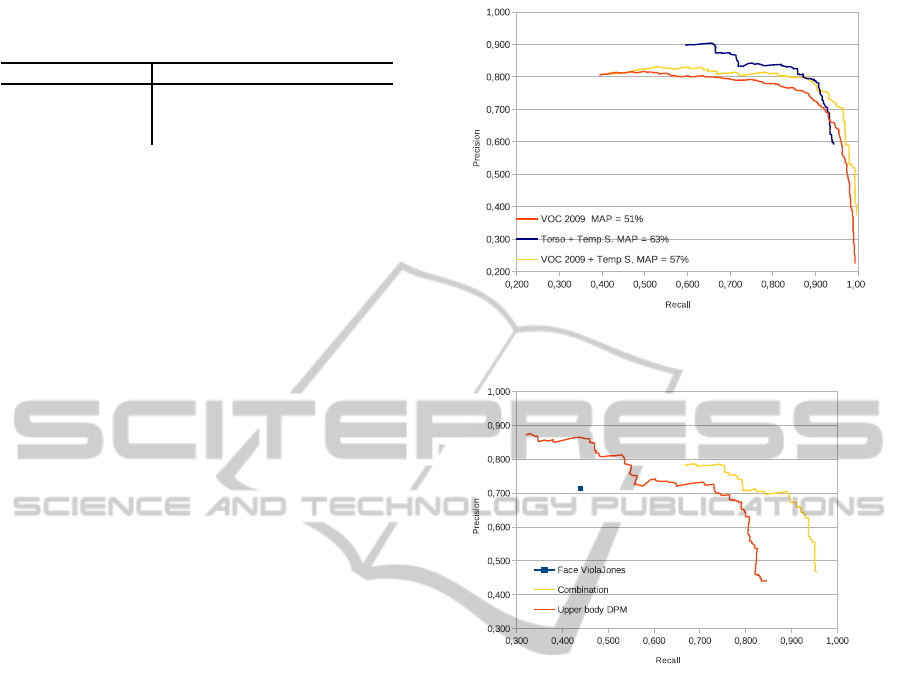
Table 1: Computational time of the object recognition im-
plementation.
# selected objects 2 3 4 5
video of 1m 6s 31 s 42 s 54 s 68 s
video of 2m 13s
61 s 80 s 104 s 133 s
video of 3m 20s
94 s 122 s 162 s 201 s
ration of the video itself. These tests were performed
on a normal recent desktop PC.
5.2 Results of Face and Body Detections
In order to present results of the face and torso de-
tections, we have labeled a set of 3000 images cap-
tured during the museum visit. In this labeling we
made a distinction between looking at an upper body
and looking at a person. This distinction is made in
order to detect when the subject is talking to some-
one, or when he/she just looks at another person. In
figure 10 we present a set of precision-recall curves
displaying the improvements we have made. A de-
tection is counted if it corresponds to either an upper
body label or a torso label. The first curve shows the
performance of the standard VOC 2009 model on our
dataset. The second curve shows the performance of
the standard VOC 2009 model in combination with
our temporal smoothing approach. The last curve
shows the new torso model in combination with our
temporal smoothing. Mainly in the recall region be-
tween 0.8 and 0.9, we reached a significant improve-
ment compared to the standard model. Indeed, with
our technique, the Mean Average Precision (MAP)
value increases by 6%.
As mentioned in the previous section, it is pos-
sible to use the first component of our model to de-
tect upper bodies, and thus use this model as an alter-
native/additional technique to the Haar-cascade face
model. An illustration of those results is presented
in figure 11. It is clear that our combined Haar-
cascade/upper body DPM model (yellow curve) is
significantly better than both the Haar-cascade detec-
tor (blue square) or our DPM upper body model (yel-
low) used separately.
5.3 Combined Results of Objects, Face
and Body Detections
An overview of the automatically generated output of
our algorithm for the museum experiment is given in
figure 12. In this figure we show a visual timeline in-
dicating how often a visitor looked at a specific object
such as a route map, a specific work of art, etc. Fur-
thermore it indicates the interaction to other persons,
Figure 10: Precision recall curves of our body detection im-
plementation compared to a standard model.
Figure 11: Precision recall curves of face detection com-
pared to upper body detections.
for example when buying a ticket or asking informa-
tion about the exhibition.
6 CONCLUSIONS AND FUTURE
WORK
In this paper we presented an approach for automatic
eye-tracker data processing based on object, face and
person detection. As opposed to (Toyama et al., 2012)
and (De Beugher et al., 2012) we presented an object
detection scheme in which a separate training is no
longer required. On top of the object detection we
presented an approach suited for counting how often
and for how long one looked at a person or a face.
In order to further improve the detection rate we pro-
posed two novelties. The first is a temporal smooth-
ing approach to avoid many false positives and false
negatives. The second is the training of a new DPM
model which is designed for torso and upper body de-
tections. We illustrated the accuracy and performance
of our approach and gave a comparison to standard
AutomaticAnalysisofIn-the-WildMobileEye-trackingExperimentsusingObject,FaceandPersonDetection
631

Figure 12: Results of our algorithm applied to the recordings of the museum visit. Each timeline represents a short summary
of viewing behaviour of a participant.
techniques and presented results of large-scale real-
life experiments. Our future work concentrates on
intelligent sampling which should avoid the process-
ing of every eye-tracker tick and thus reduce process-
ing time. We will also pay attention to a more user-
friendly visualisation of the results.
REFERENCES
Alves, R., Lim, V., Niforatos, E., Chen, M., Karapanos, E.,
and Nunes, N. J. (2012). Augmenting customer jour-
ney maps with quantitative empirical data: a case on
eeg and eye tracking.
Bay, H., Tuytelaars, T., and Van Gool, L. (2006). Surf:
Speeded up robust features. In ECCV, pages 404–417.
Brˆone, G., Oben, B., and Feyaerts, K. (2010). Insight inter-
action. a multimodal and multifocal dialogue corpus.
Brˆone, G., Oben, B., and Goedem´e, T. (2011). Towards
a more effective method for analyzing mobile eye-
tracking data: integrating gaze data with object recog-
nition algorithms. In Proc. of PETMEI, pages 53–56.
Calonder, M., Lepetit, V., Strecha, C., and Fua, P. (2010).
Brief: binary robust independent elementary features.
In ECCV, pages 778–792.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR, pages 886–
893.
De Beugher, S., Brˆone, G., and Goedem´e, T. (2012). Au-
tomatic analysis of eye-tracking data using object de-
tection algorithms. PETMEI.
Doll´ar, P., Tu, Z., Perona, P., and Belongie, S. (2009). Inte-
gral channel features. In BMVC.
Doll´ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of the
art. PAMI, 34.
Evans, K. M., Jacobs, R. A., Tarduno, J. A., and Pelz, J. B.
(2012). Collecting and analyzing eye-tracking data
in outdoor environments. Journal of Eye Movement
Research, pages 1–19.
Felzenszwalb, P. F., Girshick, R. B., and McAllester, D.
(2010). Cascade object detection with deformable part
models. In CVPR, pages 2241–2248. IEEE.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Gall, J. and Lempitsky, V. (2009). Class-specific hough
forests for object detection. In CVPR.
Henderson, J. M. (2003). Human gaze control during real-
world scene perception. Trends in Cognitive Sciences,
7(11):498 – 504.
Jokinen, K., Nishida, M., and Yamamoto, S. (2009). Eye-
gaze experiments for conversation monitoring. In
Proc. of the 3rd IUCS, pages 303–308.
Judd, T., Ehinger, K., Durand, F., and Torralba, A. (2009).
Learning to predict where humans look. In ICCV,
pages 2106–2113. IEEE.
Leutenegger, S., Chli, M., and Siegwart, R. (2011). Brisk:
Binary robust invariant scalable keypoints. In ICCV.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. In IJCV, pages 91–110.
Mathias, M., Benenson, R., Timofte, R., and Van Gool, L.
(2013). Handling occlusions with franken-classifiers.
Submitted for publication.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., and Van Gool,
L. (2005). A comparison of affine region detectors.
IJCV, 65(1-2):43–72.
Miksik, O. and Mikolajczyk, K. (2012). Evaluation of local
detectors and descriptors for fast feature matching. In
ICPR, pages 2681–2684.
Rosten, E. and Drummond, T. (2005). Fusing points and
lines for high performance tracking. In ICCV, ICCV,
pages 1508–1515.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: An efficient alternative to sift or surf.
In ICCV, pages 2564–2571.
Toyama, T., Kieninger, T., Shafait, F., and Dengel, A.
(2012). Gaze guided object recognition using a head-
mounted eye tracker. In ETRA, pages 91–98.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
632

feature detectors: a survey. Found. Trends. Comput.
Graph. Vis., 3(3):177–280.
van Gompel, R. (2007). Eye Movements: A Window on
Mind and Brain. Elsevier Science.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In CVPR, pages
511–518.
Yun, K., Peng, Y., Samaras, D., Zelinsky, G. J., and Berg,
T. L. (2013). Studying relationships between human
gaze, description, and computer vision. In CVPR.
AutomaticAnalysisofIn-the-WildMobileEye-trackingExperimentsusingObject,FaceandPersonDetection
633
