
Delineation of Rock Fragments by Classification of Image Patches using
Compressed Random Features
Geoff Bull, Junbin Gao and Michael Antolovich
School of Computing and Mathematics, Charles Sturt University, Bathurst, Australia
Keywords:
Compressed Sensing, Random Projections, Sparse Representation, Image Patches, Feature Extraction, Image
Segmentation, Classification.
Abstract:
Monitoring of rock fragmentation is a commercially important problem for the mining industry. Existing
analysis methods either resort to physically sieving rock samples, or using image analysis software. The
currently available software systems for this problem typically work with 2D images and often require a
significant amount of time by skilled human operators, particularly to accurately delineate rock fragments.
Recent research into 3D image processing promises to overcome many of the issues with analysis of 2D images
of rock fragments. However, for many mines it is not feasible to replace their existing image collection systems
and there is still a need to improve on methods used for analysing 2D images. This paper proposes a method
for delineation of rock fragments using compressed Haar-like features extracted from small image patches,
with classification by a support vector machine. The optimum size of image patches and the numbers of
compressed features have been determined empirically. Delineation results for images of rocks were superior
to those obtained using the watershed algorithm with manually assigned markers. Using compressed features
is demonstrated to improve the computational efficiently such that a machine learning solution is viable.
1 INTRODUCTION
Monitoring rock fragmention is a very important pro-
cess in the mining industry. Knowledge of fragmen-
tation can improve the economics of operating a mine
through optimizing the operation of crushing equip-
ment, and can be used to improve estimates of the
volume of ore remaining in a mine. Most importantly,
changes in fragmentation can alert the operators of a
mine to potentially fatal conditions developing in the
mine.
A standard technique to perform fragmentation
analysis has been to sieve particles through progres-
sively finer sieves and then weigh the contents of each
sieve. However, increasingly image processing and
statistical techniques are being applied to this prob-
lem to reduce costs and to make the collection of more
data in a timely manner possible.
Most algorithms for performing fragmentation
analysis on rock images rely on finding the bound-
aries that delineate individual rock fragments. Unfor-
tunately simple edge detectors perform poorly at this
task and more sophisticated approaches are necessary.
There are a number of commercial software pack-
ages that have been widely used for anlayzing frag-
mentation of rock particles on conveyor belts. One
of these is based on a combination of edge detec-
tion techniques and watershed segmentation (Gird-
ner et al., 1996). Unfortunately when used for less
constrained images, e.g. of broken rock in an under-
ground draw-point, many systems often require sig-
nificant manual editing to correct false delineation of
fragment boundaries, often taking more than 30 min-
utes per image (Demenegas, 2008). An underground
mine with 300 draw-points would require a total pro-
cessing time of less than 5 minutes per image if 1 im-
age per draw-point was to be analysed per 24 hour
period. Recent research (Noy, 2013; Thurley, 2013)
has focussed on using 3D imaging, with promising re-
sults, to overcome the limitations of 2D imaging used
in traditional analysis systems. However, upgrading
the imaging systems already deployed in existing un-
derground mines would be expensive and disrupt op-
erations, and so there remains a need to improve the
results of fragmentation analysis using 2D images.
The watershed algorithm (Beucher and Lantue-
joul, 1979) treats an image like a topographic surface,
and simulates flooding with water from local minima.
The lines where waters from different sources meet
are called watershed lines, and water is not permitted
394
Bull G., Gao J. and Antolovich M..
Delineation of Rock Fragments by Classification of Image Patches using Compressed Random Features.
DOI: 10.5220/0004743203940401
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 394-401
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

to cross these. The watershed lines form the bound-
aries between image segments. A common problem
with the watershed algorithm is that it is susceptible
to noise and tends to over-segment images. One solu-
tion to this uses markers (Meyer and Beucher, 1990),
but this solution needs the markers to be manually
specified. The mean shift algorithm (Comaniciu and
Meer, 1999) has been proposed a suitable method for
generating markers (Amankwah and Aldrich, 2011),
however that approach is computationally expensive.
Segmentation of grey scale rock images is of-
ten very challenging due to poor lighting and shad-
owing, and colour and texture variation, overlapped
rocks, fine material and determination of scale (Thur-
ley, 2009). Fragmentation analysis is difficult with
2D images (Thurley, 2009) and typically a human op-
erator often must be involved in the analysis. It has
been argued that 2D images contain insufficient infor-
mation to differentiate between overlapping and non-
overlapping rocks (Thurley, 2013). However, the fact
that a human operator is able to manually edit the re-
sults (Siddiqui et al., 2009) suggests that improved al-
gorithms may still yield better results with 2D images.
Watershed segmentation has been extended by incor-
porating 3D surface data (Thurley and Ng, 2005) and
this approach overcomes some of the issues observed
with 2D images. Despite ongoing improvements to
this technique (Thurley, 2009; Thurley, 2013), the fact
remains that it is not always practical to collect the
necessary 3D data.
A fundamental task for image processing and ma-
chine learning is the selection of appropriate features
that generalize well and have a low computational
overhead. Recent advances have seen Compressed
Sensing (CS) (Donoho, 2006; Candes and Tao, 2005)
used to learn features for image analysis and com-
puter vision. For sparse signals, CS allows the sam-
pling rate to be reduced well below the usual Nyquist
rate while still allowing almost perfect reconstruction.
Storage requirements and computational overhead are
reduced accordingly. For CS, signals are “measured”
by compressing them as they are acquired.
Classification in compressed space can achieve
accuracies close to those achieved by classification in
the original signal space (Calderbank et al., 2009). A
recent example of CS in machine learning that con-
firms this is the use of compressed sensing features
to assist in data dimensionality reduction (Gao et al.,
2012). Randomly projecting data onto lower dimen-
sion subspaces has been found (Bingham and Man-
nila, 2001) to be as effective as conventional dimen-
sionality reduction methods such as principal compo-
nents analysis (PCA). Moreover, while random pro-
jections are significantly less computationally expen-
sive than PCA, they also do not introduce signicant
distortions to the data. An issue with PCA is that if
the data contains outliers the projected subspace can
lie an arbitrarily large distance from the true subspace
(Wright et al., 2009).
CS can be used to design projections that increase
the level of compression leading to indivdual features
that are more informative than components of the
original signal. For example, random feature selec-
tion has been used to get more accurate texture clas-
sification than with features that had been specifically
designed for the task (Liu and Fieguth, 2012).
A recently demonstrated algorithm for tracking
objects in video achieves real-time performance by
using compressed features (Zhang et al., 2012). These
features have been shown to be also useful for im-
age segmentation (Bull et al., 2013). Although the
generalized Haar-like feature used has a very high
dimensionality, the computational burden is actually
very low because features are randomly projected
into a low dimensional subspace. The feature is de-
rived from the generalized Haar-like wavelet of (Dol-
lar et al., 2007)which is in turn derivedfrom the Haar-
like wavelet popularized by (Viola and Jones, 2002).
These features are very useful because they are very
sparse (Zhang et al., 2012), enabling dimensionality
reduction by random projection, and they are very ef-
ficient to compute via the method of integral images
(Viola and Jones, 2002).
In this paper, the use of machine learning to-
gether with compressed random features to solve the
problem of finding fragment boundaries is proposed.
Manually delineated images of rocks are used to train
a support vector machine (SVM)(Cortes and Vap-
nik, 1995), and the model produced is used to pre-
dict boundary regions in test images. A compressed
Haar-like feature vector is used and compared to us-
ing simple brightness patches as features. The min-
imum length of feature vector needed for good clas-
sification is empirically determined, and the optimum
size of image patches to use for feature extraction is
also found. The use of these techniques is justified
by comparing the results with those achieved with the
watershed algorithm.
The remainder of this paper is structured as fol-
lows: The proposed classification algorithm and the
compressed Haar-like feature are described in Sec-
tion 2. The experimental investigation is then pre-
sented, along with a discussion of the results, in Sec-
tion 3. The results are summarized and conclusions
drawn in Section 4.
DelineationofRockFragmentsbyClassificationofImagePatchesusingCompressedRandomFeatures
395

2 THE PROPOSED APPROACH
2.1 Compressed Features
In this section the construction of random compressed
features is described.
Compressed sensing (CS) (Donoho, 2006; Can-
des and Tao, 2005) is based on the idea that a sig-
nal can be reconstructed from a very limited num-
ber of measurements if the signal has a sparse rep-
resentation in some basis. When such a sparse rep-
resentation exists, the signal is said to be compress-
ible. The Restricted Isometry Property (RIP) and the
related Johnson–Lindenstrauss (JL) lemma (Baraniuk
et al., 2008) are two well-known theorems of CS. RIP
determines the conditions under which a compressed
signal can be efficiently reconstructed. From JL it can
be shown that if a signal is sampled using a properly
designed measurement matrix the distances between
signals after compression will be very close to the dis-
tances between the same signals before compression
(Baraniuk et al., 2008). The proposed method relies
on this observation.
The properties of compressed sensing only hold
for signals that are sparse (i.e. most values being
zero). However, many images are not sparse in their
original domain and they must be represented in some
basis where they are sparse. Consider a signal con-
sisting of a n ×n square patch surrounding a pixel
in an input image, that can be represented as an n
2
-
dimensional vector x ∈ R
n
2
. If the patch x is com-
pressible, it can be transformed to a sparse vector
f = Ψx ∈ R
D
by a sparsifying matrix Ψ. The sparse
vector will have most of the coefficients close to zero.
Usually D ≫ n
2
, in our case D = n
4
, and it would
be very inefficient to perform computations directly
on the sparsified vector. To make the calculations
tractable, a dimensionality reducing transform Φ, is
applied to reduce the signal down to a k-dimensional
vector
y = Φf = ΦΨx ∈ R
k
. (1)
y is called a Compressed Sensing Feature and f the
Sparse Coding Feature (Gao et al., 2012). Φ is known
as the measurement matrix.
For the measurement matrix to preserve projected
distances between feature vectors, the Johnson–
Lindenstrauss lemma must be satisfied and Achliop-
tas(Achlioptas, 2001) found that is the case if the en-
tries in Φ are
φ
ij
=
√
s
1 with probability
1
2s
0 with probability1 −
1
2s
−1 with probability
1
2s
, (2)
for values of s = 2 and 3. In fact, according to Li et
al. (Li et al., 2006), s ≫ 3 will still satisfy JL with a
limit of s = D/log D for approximately normal data.
A value of s = D/4 has been demonstrated to give
good results (Zhang et al., 2012).
To generate the sparsifying matrix Ψ, the same
method as Zhang et al.(Zhang et al., 2012) is used.
The n×n square around each pixel is convolved with
all possible box filters and the responses of the filters
are concatenated into a single feature vector f ∈ R
n
4
.
When this vector is multiplied by the sparse mea-
surement matrix Φ, most of the entries in f are dis-
carded, and this would be very wasteful if the calcu-
lations were performed explicitly. To avoid this, only
the non-zero entries of the matrix ΦΨ ∈ R
k×n
2
are
stored, and only the locations, sizes and weights of
the rectangles for the box filters that ultimately con-
tribute to a compressed featured are calculated and
stored. This approach for calculating a representation
of ΦΨ is shown Algorithm 1. Zhang et al.(Zhang
et al., 2012) observed that the box filter outputs ran-
domly multiplied by ±1 results in features very sim-
ilar to the Haar-like features (Viola and Jones, 2002),
and are very efficient to calculate by the method of
integral images (Viola and Jones, 2002).
For an image with N pixels, the n × n square
patch around pixel i is the signal x
i
. If all x
i
patches in the image are gathered together, a ma-
trix X = [x
1
,... ,x
N
] ∈ R
n
2
×N
is formed. Then the
compressed features for the entire image are Y =
[y
1
,... ,y
N
] ∈ R
k×N
, where y
i
is given by Equa-
tion 1. Y is calculated according the method in Al-
gorithm 2. The number of compressed features k and
the size of the patches n
2
are determined empirically,
as discussed in Section 3.
2.2 Classification
In this section, the approach for classifying features
extracted from rock images is described.
The objective is to identify boundaries between
rock fragments in a grey-scale image. A supervised
classification method is used to label small image
patches as either “boundary” or “non-boundary” ac-
cording to the following steps. Different images of
rocks were selected for training, validation of parame-
ters and final testing. The pixels in these images were
manually designated as being on a boundary between
rocks, or as not being on a boundary. An area around
each boundary was masked so it would not be used
for training and classification, as there is some uncer-
tainty about the exact location of the boundary and
what classification should be assigned to pixels close
to the boundary.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
396
There are many more non-boundary pixels than
boundary pixels in an image. Ten percent of boundary
pixels in each image were randomly selected for pro-
cessing, and a similar number of non-boundary pixels
were also selected for the training set. This equaliza-
tion is to avoid the following scenario. If the dataset is
very unbalanced, with say 90% of pixels in one class
and 10% in the other, 90% accuracy can be achieved
simply by classifying all pixels as being in the dom-
inant class. It is also possible to hanfle this situation
by weighting training samples; however sampling the
data also reduces the processing time so is the pre-
ferred method when sufficient data is available.
Algorithm 1: Calculation of ΦΨ compression matrix rep-
resentation.
Input:
patch size n
number of features k
minimum number of box filters nf
min
maximum number of box filters nf
max
Output: ΦΨ representation
for all feature j ∈ {1 ... k} do
Generate random number of box filters nf
nf ∈ {nf
min
...nf
max
}
weight = 1/
√
nf
for all box filter bf ∈ {1 .. . nf} do
filter location = random within patch
filter size = random
assign weight with random sign to filter
end for
end for
return set of box filters representing ΦΨ
Algorithm 2: Calculation of Y = ΦΨX for an image.
Input:
Image
ΦΨ representation
Output: Y compressed features for image
Calculate integral image to be used for filter response
calculations.
for all pixel patch x
i
do
for all feature j ∈ {1 ... k} do
y
ji
= weighted filter response for feature j
end for
end for
return Y compressed feature vectors
At each selected pixel location both square
patches of brighness features, and compressed Haar-
like features, were extracted. A support vector ma-
chine (SVM) was trained using a radial basis func-
tion (RBF) kernel with the extracted features on the
training set. An SVM with RBF has two parame-
ters: C and γ. A grid search was performed to find
the best combination of parameters, with the valida-
tion dataset being used to measure which was best. A
separate validation image was used rather than cross-
validation on the training data because the training
data, being spatially dependent, are not independent.
Cross-validation on the training data would give a bi-
ased model that may not generalize well to other data.
The method for training an SVM model is shown in
Figure 1, and the method for performing a test using
the trained model is shown in Figure 2.
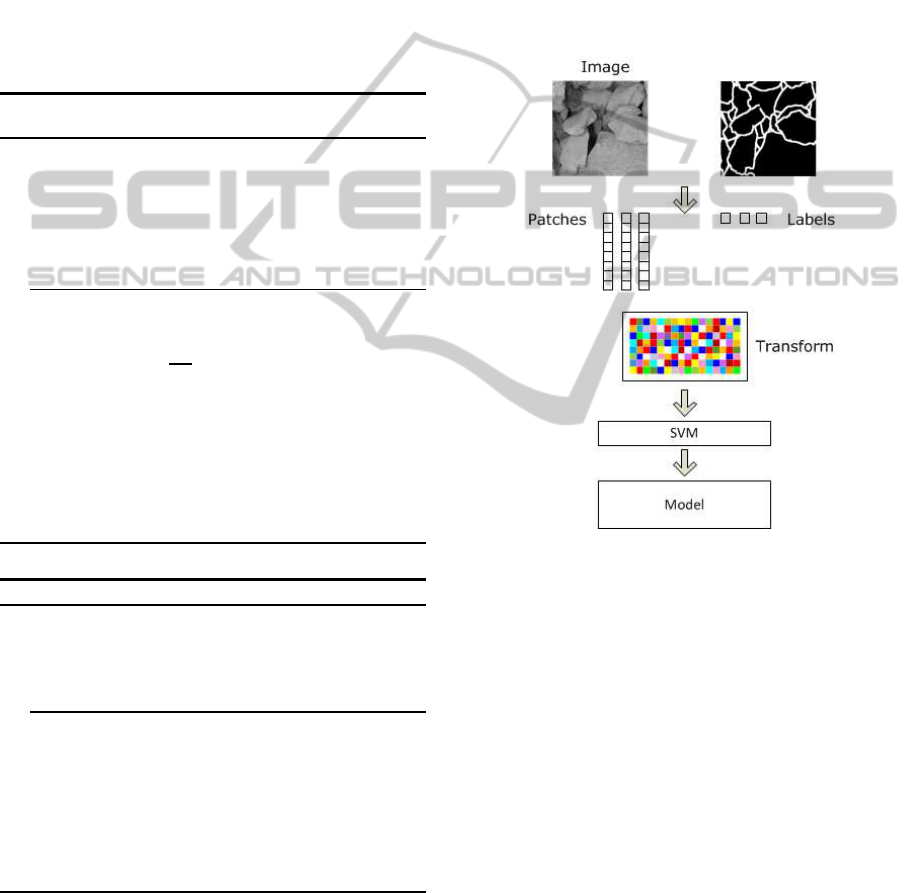
Figure 1: SVM training is consists of creating a model us-
ing a training image and associated pixel labels. Features
for training are created by taking small image patches and
applying the transforms in Equation (1). When the raw in-
tensity of the image is used as features, the transform is
omitted.
3 EXPERIMENTAL RESULTS
The aims of the experiments were to establish the
overall accuracy of identifying the boundaries of the
rock fragments; to compare the accuracy of classifica-
tion using compressed features with the accuracy us-
ing raw intensity patches; to find the optimum sized
image patch; to determine the number of compressed
features needed to get good accuracy; to understand
the variability of results due to random generation of
features; and compare the time taken for classification
using compressed features with the time taken using
raw intensity patches.
DelineationofRockFragmentsbyClassificationofImagePatchesusingCompressedRandomFeatures
397

Figure 2: SVM validation and testing involves taking a test
image and extracting features according to Equation (1).
The previously trained SVM model is used to predict la-
bels for the pixels in the test image and the these labels are
compared against a ground truth reference.
3.1 Training, Validation and Testing
Data
Unfortunately, to the best of our knowledge, there is
not a generally available dataset for this application.
For training data, a grey-scale image of some rocks
was selected as shown in Figure 3(a). To create train-
ing labels, the edges of rocks were manually delin-
eated using a four pixel wide line, as shown in Fig-
ure 3(d). An n ×n square patch was taken around
each pixel and the n
2
pixel intensities in that square
used as a feature. Pixels within 11 pixels of desig-
nated edges were excluded from the training dataset,
because of the uncertainty as to whether they should
be classified as edge or non-edge. The mask used for
this purpose was generated by a morphological dila-
tion of the edges in Figure 3(d). Pixels from edges
were labelled +1 and pixels from non-edge regions
were labelled -1. Each image in Figure 3 is 4 Mega-
pixels.
Validation and testing data were generated using
the same method as for training data, and this is also
shown in Figure 3.
(a) (b) (c)
(d) (e) (f)
Figure 3: Data used for the experiments. The image data
used for training, validation and testing is shown in (a), (b)
and (c) respectively. The pixel labels used are shown below
each image, in (d), (e), and (f).
3.2 SVM Training and Parameter
Selection
For the experiments, the LIBSVM (Chang and Lin,
2011) support vector machine was used with a radial
basis function (RBF) kernel. For this, two parame-
ters are needed: C and γ. To choose the best values
for the parameters, a grid search was performed using
the validation image. The parameters that achieved
the best accuracy for classifying the validation image
were selected for use in testing.
To balance the training set, all pixels on edges
were included, pixels not on edges were randomly
sampled so that the training set includes features for
edge and non-edge pixels in approximately equal pro-
portions. Then to reduce the size of the training set,
10% of the data were randomly selected to be actually
used for training.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
398

3.3 Results and Discussion
To establish the overall accuracy of identifying the
boundaries of the rock fragments and to compare the
accuracy of classification using compressed features
with the accuracy using raw intensity patches two
SVMs were trained and validated using the appro-
priate images from Figure 3, using 15 × 15 image
patches. The first SVM used compressed Haar-like
features of dimension 20, while the second used the
raw intensity patch (dimension 225). Pixels from the
test image in Figure 3 were sampled and classified
by both SVMs. The resulting classifications are dis-
played in Figure 4. In each classified image, correctly
classified pixels are displayed in green and incorrect
pixels are red. The pixels that were not sampled are
shown in their original colour.
The test accuracy for the compressed features in
Figure 4(a) is 86.7% and for the the raw intensity fea-
tures in Figure 4(b) is 82.5%. The result images for
compressed features and for the raw intensity patch
classifications have a different appearance partly be-
cause the two types of features having different pre-
cision/recall characteristics. With the raw intensity
patches, more rock boundaries are recalled correctly
but this is offset by poorer precision causing solid
rock to misclassified as boundaries.
The performance of the proposed method was
compared with the watershed algorithm on the test
image. A satisfactory algorithm for generating wa-
tershed markers was not available, so markers were
placed at the centre of each human identified frag-
ment. This means that the watershed results were un-
realistically good. The boundaries found by the wa-
tershed algorithm compared to human drawn bound-
aries are shown in Figure 4(c). If a watershed bound-
ary was within 11 pixels of a “true” edge, the edge
was deemed as having been recalled. Using this
method, recall was calculated as 79.9%. However
there were many watershed lines that did not corre-
spond to edges, resulting in a precision (the % of
predicted edges that are actually edges) being only
67.8%. For classification of compressed features in
Figure 4(a), the recall is 80.7% and the precision is
89.8%. As a proxy for the accuracy of watershed,
the F score is 82.5%. The F score for classification
is 85%, which is very close to the measured accuracy.
The two approaches are comparable (assuming proper
markers can be generated for watershed), except that
the watershed tends to generate more edges that are
well away from the true edges.
The accuracy of classification using compressed
features are compared with the accuracy using raw in-
tensity patches are compared in Table 1. Similar accu-
(a) (b) (c)
Figure 4: (a) Result for classifying sampled 15 ×15 patches
from the test image using compressed Haar-like features
(20D), (correctly classified samples are marked with a green
square, and incorrect samples with a red square); (b) result
for classifying raw intensity patches (225D); and (c) com-
parison of watershed boundaries (red) with human drawn
boundaries (green) in test image, yellow indicates the two
coincide, and blue dots are watershed markers.
Table 1: Validation accuracy for three sizes of image
patches using 20 compressed features per patch, compared
to using raw image intensity features. The classification ac-
curacies for the compressed and raw patches are compara-
ble, as expected.
CS (20) Raw
7 ×7 Accuracy 80.4% 83.5%
15 ×15 Accuracy 85.3% 85.3%
21 ×21 Accuracy 85.3% 83.8%
racies were achieved, indentical for a 15 ×15 patch.
This is expected as the accuracy of classification of
compressed signals should be close to that achieved
for uncompressed signals (Calderbank et al., 2009).
To determine the optimum size of the image
patches, compressed features of length 50 were gener-
ated for patch sizes from 5×5 through to 23×23. The
validation accuracy is plotted in Figure 5, together
with the test accuracy. The validation accuracy was
used to select the optimum size image patch: 15 ×15.
The choice of image patch size is confirmed using
the test accuracy. The 13 ×13 patch acually had a
slightly better test accuracy than the chosen patch size
of 15 ×15.
To determine how many features were needed in
the compressed feature vector, tests were performed
with many different patch sizes and feature vector
lengths. The testing and validation accuracies for
7 ×7, 15 ×15 and 21 ×21 are plotted against the fea-
ture vector length in Figure 6. It was found for all
patch sizes that accuracy was very poor with only a
few features, where underfitting would be occuring.
The accuracy increased rapidly with the number of
DelineationofRockFragmentsbyClassificationofImagePatchesusingCompressedRandomFeatures
399

Figure 5: Validation and test accuracy for patch sizes from
5 ×5 to 23 × 23, with the intensity patch compressed to
50 features. The optimum size patch is selected by finding
the patch size with the highest validation accuracy, which is
15 ×15.
Figure 6: Number of compressed features versys valida-
tion and test accuracy for patch sizes of 7 ×7, 15 ×15 and
21 ×21. For all patch sizes, the number of features can be
compressed to as few as 20 before accuracy drops off.
features. However, increasing feature lengths above
20 did not result in significant further increases in ac-
curacy, regardless of the patch size. The accuracy for
the 7 ×7 patch, which of course contains 49 pixels,
dropped off sharply, and rose again, when the com-
pressed feature length increased above 50. A possible
cause of this is overfitting.
Since the features are randomly generated, and the
dimensionality reduced by using random projections,
a test was performed to determine whether results var-
ied greatly due to the random variations inherent in
the method. Tests with varying random number gen-
erator seeds were run for images with compressed
features of length 20 generated from 15 ×15 patches.
The accuracy for the test images, across five tests, var-
ied between 85.6% and 86.7%. This small variation
is expected with a properly constructed measurement
matrix and sparse input signal.
A benefit of the compressed feature is that there is
a much smaller computational burden. For a 15 ×15
patch with 20 compressed features the grid search and
evaluation needed to train the SVM model (requir-
ing training 90 models and performing 270 classifi-
cations) could be completed in approximately 6.74
hours. For the same patch, using the raw image in-
tensity the grid search took in 74.5 hours. While the
SVM only needs to be trained once for a particular
mine site, the shortened training time due to the com-
pressed features allows many more design options to
be explored. The time to predict labels is a more
important issue, as it is incurred for processing ev-
ery image. The times taken to predict labels for the
test image using 15 ×15 patches are given in Table 2,
where the entry for 225 features is for the raw inten-
sity patch and the other entries are for compressed
features. The use of compressed features reduces the
processing time by over 25×, making the overall ap-
proach feasible.
Table 2: Time in seconds for classifying the test image us-
ing 15 ×15 patches for different numbers of features. The
entry with 225 is the raw patch with no compression. This
demonstrates that feature compression isimportant for good
performance, achieving more than 25× speed up for 20 fea-
tures.
No. Features 20 50 80 225 (raw)
Prediction time (s) 21 30 120 579
4 CONCLUSIONS
A method has been proposed to delineate rock frag-
ments with a possible application for the mining in-
dustry. The method overcomes some disadvantages
of existing techniques by using a machine learning
approach, combined with random compressed fea-
tures, to classify small image patches. For the data
set used, the optimum patch size was found to be
15 ×15. Just 20 compressed features were sufficient
to give as good, or better, classification accuracy than
the full 225 pixels in a raw image patch. Approxi-
mately 85% of rock fragments are classified correctly.
The method compares favourably to the watershed al-
gorithm and has the advantage of not needing mark-
ers. The small size of the compressed feature im-
proved training times by a factor of 10 and classifica-
tion times by more than 25, over using uncompressed
image patches. Future work will look at enhancing
the feature to improve accuracy, particularly for the
case of overlapped rocks, and differentiating fine par-
ticles from solid rock.
ACKNOWLEDGEMENTS
The research is sponsored by the Newcrest Mining
Project at CSU and the Compact Grant from the Fac-
ulty of Business at CSU.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
400

REFERENCES
Achlioptas, D. (2001). Database-friendly random pro-
jections. In Proceedings of the twentieth ACM
SIGMOD-SIGACT-SIGART symposium on Principles
of database systems, PODS ’01, pages 274–281, New
York, NY, USA. ACM.
Amankwah, A. and Aldrich, C. (2011). Automatic ore
image segmentation using mean shift and watershed
transform. In Radioelektronika (RADIOELEKTRON-
IKA), 2011 21st International Conference, pages 1–4.
Baraniuk, R., Davenport, M., DeVore, R., and Wakin, M.
(2008). A simple proof of the restricted isometry prop-
erty for random matrices. Constructive Approxima-
tion, 28(3):253–263.
Beucher, S. and Lantuejoul, C. (1979). Use of watersheds
in contour detection. In International Workshop on
image processing, real-time edge and motion detec-
tion/estimation.
Bingham, E. and Mannila, H. (2001). Random projection in
dimensionality reduction: applications to image and
text data. In Proceedings of the seventh ACM SIGKDD
international conference on Knowledge discovery and
data mining, KDD ’01, pages 245–250, New York,
NY, USA. ACM.
Bull, G., Gao, J., and Antolovich, M. (2013). Image seg-
mentation using random features. In The 2013 5th
International Conference on Graphic and Image Pro-
cessing (ICGIP 2013).
Calderbank, R., Jafarpour, S., and Schapire, R. (2009).
Compressed learning: Universal sparse dimensional-
ity reduction and learning in the measurement domain.
Manuscript.
Candes, E. and Tao, T. (2005). Decoding by linear pro-
gramming. Information Theory, IEEE Transactions
on, 51(12):4203–4215.
Chang, C.-C. and Lin, C.-J. (2011). LIBSVM: A li-
brary for support vector machines. ACM Transactions
on Intelligent Systems and Technology, 2:27:1–27:27.
Software available at http://www.csie.ntu.edu.tw/
∼cjlin/libsvm.
Comaniciu, D. and Meer, P. (1999). Mean shift analysis and
applications. In Computer Vision, 1999. The Proceed-
ings of the Seventh IEEE International Conference on,
volume 2, pages 1197–1203.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20:273–297.
Demenegas, V. (2008). Fragmentation analysis of opti-
mized blasting rounds in the aitik mine: effect of spe-
cific charge. Master’s thesis, Lule˚a tekniska univer-
sitet.
Dollar, P., Tu, Z., Tao, H., and Belongie, S. (2007). Fea-
ture mining for image classification. In Computer Vi-
sion and Pattern Recognition, 2007. CVPR ’07. IEEE
Conference on, pages 1–8.
Donoho, D. (2006). Compressed sensing. Information The-
ory, IEEE Transactions on, 52(4):1289–1306.
Gao, J., Shi, Q., and Caetano, T. S. (2012). Dimensionality
reduction via compressive sensing. Pattern Recogni-
tion Letters, 33(9):1163 – 1170.
Girdner, K., Kemeny, J., Srikant, A., and McGill, R. (1996).
The split system for analyzing the size distribution of
fragmented rock. In Franklin and Katsabanis, edi-
tors, Measurement of Blast Fragmentation – Proceed-
ings of the FRAGBLAST 5 Workshop., pages 101–108,
Balkema.
Li, P., Hastie, T. J., and Church, K. W. (2006). Very sparse
random projections. In Proceedings of the 12th ACM
SIGKDD international conference on Knowledge dis-
covery and data mining, KDD ’06, pages 287–296,
New York, NY, USA. ACM.
Liu, L. and Fieguth, P. (2012). Texture classification from
random features. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, 34(3):574–586.
Meyer, F. and Beucher, S. (1990). Morphological segmen-
tation. Journal of Visual Communication and Image
Representation, 1(1):21 – 46.
Noy, M. J. (2013). Automated rock fragmentation mea-
surement with close range digital photogrammetry. In
Sanchidrian Blanco, J. A.and Singh, A. K., editor,
Measurement and Analysis of Blast Fragmentation:
Workshop FRAGBLAST 10 - The 10th International
Symposium on Rock Fragmentation by Blasting.,
pages 13–21, Boca Raton, Fla. CRC Press/Balkema.
Siddiqui, F., Shah, S. A., and Behan, M. (2009). Measure-
ment of size distribution of blasted rock using digital
image processing. Engineering Sciences, 20(2):81–
93.
Thurley, M. (2009). Fragmentation size measurement us-
ing 3d surface imaging. In Blanco, J. A. S., editor,
Fragblast 9 : Rock Fragmentation By Blasting. Pro-
ceedings of the 9th International Symposium On Rock
Fragmentation By Blasting, pages 229–237, Boca Ra-
ton, Fla. CRC Press/Balkema.
Thurley, M. (2013). Automated, on-line, calibration-free,
particle size measurement using 3d profile data. In
Sanchidrian Blanco, J. A.and Singh, A. K., editor,
Measurement and Analysis of Blast Fragmentation:
FRAGBLAST 10 - The 10th International Symposium
on Rock Fragmentation by Blasting., pages 23–32,
Boca Raton, Fla. CRC Press/Balkema.
Thurley, M. J. and Ng, K. C. (2005). Identifying, visual-
izing, and comparing regions in irregularly spaced 3d
surface data. Computer Vision and Image Understand-
ing, 98(2):239–270.
Viola, P. and Jones, M. (2002). Robust real-time object
detection. International Journal of Computer Vision,
57(2):137–154.
Wright, J., Ganesh, A., Rao, S., Peng, Y., and Ma, Y. (2009).
Robust principal component analysis: Exact recov-
ery of corrupted low-rank matrices via convex opti-
mization. In Bengio, Y., Schuurmans, D., Lafferty, J.,
Williams, C. K. I., and Culotta, A., editors, Advances
in Neural Information Processing Systems 22, pages
2080–2088.
Zhang, K., Zhang, L., and Yang, M.-H. (2012). Real-time
compressive tracking. In Fitzgibbon, A., Lazebnik,
S., Perona, P., Sato, Y., and Schmid, C., editors, Com-
puter Vision - ECCV 2012, volume 7574 of Lecture
Notes in Computer Science, pages 864–877. Springer
Berlin Heidelberg.
DelineationofRockFragmentsbyClassificationofImagePatchesusingCompressedRandomFeatures
401
