
Accurate Synchronization of Gesture and Speech
for Conversational Agents using Motion Graphs
Jianfeng Xu, Yuki Nagai, Shinya Takayama and Shigeyuki Sakazawa
Media and HTML5 Application Laboratory, KDDI R&D Laboratories, Inc., Fujimino-shi, Japan
Keywords:
Conversational Agents, Multimodal Synchronization, Gesture, Motion Graphs, Dynamic Programming.
Abstract:
Multimodal representation of conversational agents requires accurate synchronization of gesture and speech.
For this purpose, we investigate the important issues in synchronization as a practical guideline for our algo-
rithm design through a precedent case study and propose a two-step synchronization approach. Our case study
reveals that two issues (i.e. duration and timing) play an important role in the manual synchronizing of gesture
with speech. Considering the synchronization problem as a motion synthesis problem instead of a behav-
ior scheduling problem used in the conventional methods, we use a motion graph technique with constraints
on gesture structure for coarse synchronization in a first step and refine this further by shifting and scaling
the motion in a second step. This approach can successfully synchronize gesture and speech with respect to
both duration and timing. We have confirmed that our system makes the creation of attractive content easier
than manual creation of equal quality. In addition, subjective evaluation has demonstrated that the proposed
approach achieves more accurate synchronization and higher motion quality than the state-of-the-art method.
1 INTRODUCTION
Synchronization of gesture and speech is essential in
conversational agents (Cassell et al., 2001; Nishida,
2007), and animators spend an enormous amount
of effort using either intuition or motion capture
to achieve it. Although synchronization description
schemes (e.g. the Behavior Markup Language, BML
(Kopp et al., 2006)) have been proposed and widely
used in the academic field (Marsella et al., 2013), it
remains a challenge to produce such synchronization
automatically. In this paper, we propose an effec-
tive synchronization solution using a different philos-
ophy than the conventionalmethods. The basic idea is
to consider the synchronization problem as a motion
synthesis problem instead of a behavior scheduling
problem where the gesture motions are re-scheduled
in the timeline according to the speech (Cassell et al.,
2001; Neff et al., 2008; Marsella et al., 2013). The
greatest benefit is that we can significantly improve
both the synchronization accuracy and motion quality
simultaneously.
Psychological research has shown that gesture and
speech have a very complex relationship (McNeill,
1985). Although they are believed to share a com-
mon thought source, the hypothesized growth point
(McNeill, 2005), the relationship between gesture and
speech is many-to-many. For example, to emphasize
a word in an utterance, one may use a beat gesture,
a nod, or an eyebrow. On the other hand, a nod
may mean confirmation rather than emphasis. Fur-
thermore, many other factors affect the relationship
between gesture and speech such as personality, gen-
der, culture, conversational context, etc. (Neff et al.,
2008; Marsella et al., 2013). For example, Japanese
talk to each other with nodding, but a nod means at-
tentiveness rather than agreement. In addition, hu-
man perception is highly sensitive to the synchroniza-
tion of speech and gesture. Although the temporal
tolerance is basically dependent on the content and
human subject, it is believed that high accuracy (e.g.
150ms) is required by most of human subjects (Miller
and D’Esposito, 2005). For example, a level of the
phoneme is perceptible for most of people to watch a
speaker’s mouth movements (McGurk and MacDon-
ald, 1976).
In the field of conversational agents (Cassell et al.,
2001) and human-robot interaction (Ng-Thow-Hing
et al., 2010), the synchronization of gesture and
speech is based on a common practice that synchro-
nizes the gesture stroke (see the definition in Section
3) with the accented syllable of the accompanying
speech (Neff et al., 2008). Based on this, the latest
system (Marsella et al., 2013) uses an offset/scaling
5
Xu J., Nagai Y., Takayama S. and Sakazawa S..
Accurate Synchronization of Gesture and Speech for Conversational Agents using Motion Graphs.
DOI: 10.5220/0004748400050014
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 5-14
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

technique for synchronization of gesture and speech.
Due to the absence of practical guidelines on au-
tomating synchronization, in this paper, we investi-
gate the important issues in the manual synchroniza-
tion of gesture with speech. Two similar but not iden-
tical scripts are prepared. We examine the differences
among manually created animations of the two scripts
and discover practical guidelines for our algorithm.
As a result, the above case study reveals that two is-
sues (i.e. duration and timing) play an important role
in the manual synchronizing of gesture with speech.
To automatically produce accurate synchroniza-
tion of gesture and speech, in essence, we consider
the synchronization problem to be a motion synthe-
sis problem with certain constraints. At the same
time, we observe that many gestures are cyclic or use
similar poses, which results in the adoption of the
motion graph technique (Kovar et al., 2002; Arikan
and Forsyth, 2002; Lee et al., 2002). The motion
graph technique is reported to be a powerful tool for
synthesizing natural motion from an original motion
with constraints such as motion duration (Kovar et al.,
2002; Arikan and Forsyth, 2002; Lee et al., 2002). In
addition, it is well known that gestural motion has a
special temporal structure, which is important in the
synchronization of gesture and speech (Neff et al.,
2008). Our experimental results show that the pro-
posed algorithm works well in our scenarios.
In this paper, our technical contributions are sum-
marized as follows.
1. With a case study, we have discovered that two
issues (i.e. duration and timing) play an important
role in the manual synchronizing of gesture with
speech, which becomes a practical guideline for
our algorithm.
2. We propose a two-step approach based on the mo-
tion graph technique (Kovar et al., 2002; Arikan
and Forsyth, 2002; Lee et al., 2002) with a tem-
poral structure of gestures that deals with the is-
sues of duration and timing. In the first step, we
synthesize a new motion that is coarsely synchro-
nized with the speech. In the second step, we
further refine the synchronization by shifting and
scaling the synthesized motion.
In addition, we implement our system as an au-
thoring tool, which outputs a synthesized animation
with facial expressions and gestures synchronized
with the audio signal. To use the authoring tool, we
input an audio file that records a speaker’s voice and
its script with timing tags, and then assign the desired
gesture and emotion for each sentence in the script.
As a basic unit of generating animation, the authoring
tool synthesizes a new motion with facial expressions
that is synchronizedwith the input speech sentence by
sentence. As one of the target applications, we create
some animations for education by our authoring tool,
where we get rather positive feedback from university
students in an evaluation experiment.
This paper is organized as follows. Section 2 sur-
veys some techniques related to our approach. As the
core of this paper, Section 3 describes the precedent
case study and the algorithm for synchronizing ges-
ture and speech in detail. In Section 4, we briefly
introduce our authoring tool that can output a rich an-
imation with facial expressions and gestures synchro-
nized with speech. In Section 5, we report our exper-
imental results, including a subjective evaluation that
compares our approach to the conventional method
(Marsella et al., 2013). In Section 6, we briefly intro-
duce the applications to education using the authoring
tool. Finally, we present our conclusions and future
work in Section 7.
2 RELATED WORK
In the last two decades, many embodied conversa-
tional agents (ECAs) have been developed whose
multimodal representation has been shown to be ap-
pealing to users. Most ECA systems are composed
of three sequentially executed blocks: audio/text un-
derstanding, behavior selection, and behavior editing
(Cassell et al., 2001). Many techniques are available
for audio/text understanding (Marsella et al., 2013;
Stone et al., 2004), which provides the needed acous-
tic and semantic information for behavior selection.
Especially, by performing deep analysis of syntactic,
semantic and rhetorical structures of the utterance,
(Marsella et al., 2013) achieves semantically appro-
priate behavior, which is their central contribution.
For behavior selection, the de-facto method is a rule-
based approach (Cassell et al., 2001; Ng-Thow-Hing
et al., 2010; Marsella et al., 2013) that maps keywords
to behaviors or behavior categories by a large set of
predefined rules. For behavior editing, existing sys-
tems focus mainly on hand trajectory modification by
physical simulation (Neff et al., 2008) or cubic spline
interpolation (Ng-Thow-Hing et al., 2010). Unfortu-
nately, there are as yet few techniques for multimodal
synchronization, although this is believed to be essen-
tial to properly convey the emotional component of
communication. Lip synchronization is widely used
in ECA systems thanks to TTS (text to speech) tech-
niques (Dutoit, 2001). For synchronization of ges-
ture and speech, the early work (Cassell et al., 2001)
aligns the timing of gesture motions with text words,
and the latest paper (Marsella et al., 2013) improves
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
6

the synchronization level to gesture phases using the
offset and scaling approach, in which the timing of
the stroke phase in gesture motion is aligned with the
speech. However, such an approach will change the
quality of motions and even the emotional state of
gestures if the scaling factor is too large.
On the other hand, psychological research on
multimodal synchronization continues and has pro-
vided many valuable insights for ECA systems. The
hypothesized growth point, proposed by (McNeill,
2005), is a well-known theory to explain the phe-
nomenon of synchronization of gesture and speech.
Moreover, based on the fact that the structure of ges-
ture is different from other human motions like danc-
ing, (Neff et al., 2008) pointed out that the stroke
phase should be synchronizedwith the accented sylla-
ble of the accompanying speech. However, these dis-
coveries only specify a result without providing the
processing needed to produce it automatically (Kopp
et al., 2006).
In addition, usage of ECAs has been demonstrated
to be potential in many fields besides the original in-
terface agents in human computer interaction such as
Rea (Cassell et al., 1999), Greta (Niewiadomski et al.,
2009; Huang and Pelachaud, 2012), and RealActor
(
ˇ
Cerekoviˇc and Pandˇziˇc, 2011). For instance, a virtual
human presenter is designed for weather forecasting,
and slide presentation in the work of (Noma et al.,
2000). It is reported that a navigation agent such as
a guide in a theater building (van Luin et al., 2001)
or a university campus (Oura et al., 2013) is help-
ful to visitors. Especially, digital education is attract-
ing much attention from both academic and industrial
fields with the rapid development of tablet and mobile
devices. Although some systems such as (Beskow
et al., 2004) are reported, this paper will further give
the evaluation of agent’s effectiveness in education.
3 SYNCHRONIZING GESTURE
WITH SPEECH
In state-of-the-art systems (Neff et al., 2008; Marsella
et al., 2013), the number of gestures in the database is
not very large, amounting to just dozens of available
gestures, which is comparable to the number used by
a TV talk show host (Neff et al., 2008). However, a
human being performs each gesture variably accord-
ing to the context, e.g. synchronizing the gesture with
speech. Therefore, gesture variation is rather large in
human communication. This indicates that the task of
gesture synchronization is in essence to synthesize a
new motion from a generic one for a particular portion
of speech, which is a motion synthesis problem (Ko-
var et al., 2002; Arikan and Forsyth, 2002; Lee et al.,
2002). As far as we know, this viewpoint is different
from the behavior scheduling concept used in conven-
tional methods (Cassell et al., 2001; Neff et al., 2008;
Marsella et al., 2013).
As described before, most gestures have a tem-
poral structure with multiple consecutive movement
phases including a preparation (P) phase, a stroke (S)
phase, and a retraction (R) phase (Neff et al., 2008).
Only the S phase is essential, as it is the most ener-
getic and meaningful phase of the gesture. In this pa-
per, the parts before and after the S phase are denoted
as the P and R phases, respectively. Please see Fig. 1
as a reference.
3.1 Investigation by Case Study
In this section, we look for the guidelines for our syn-
chronization algorithm through a case study. Con-
sider a scenario in which a virtual agent talks with you
about your diet when you eat ice cream on two days,
which may exceed your preferred calorie consump-
tion. We prepare the following two scripts, with simi-
lar content but different lengths and emotional states.
Note that both scripts are translated from Japanese.
Only Japanese versions are used in the case study.
1. (for Day One) Good morning. Ah–, you must
have eaten ice cream last night! You solemnly
promised to go on a diet! Well, you gotta do some
walking today. Since the weather is fine, let’s go
now.
2. (for Day Two) Good morning. Ah—, you must
have eaten ice-cream again last night. That’s
two days in a row!! Were you serious when you
promised to go on a diet? Well, now you gotta
walk that much farther. The forecast says rain this
afternoon, so let’s go now.
The speech is recorded by a narrator. A staff mem-
ber creates the animations manually using the author-
ing tool MikuMikuDance (no relation to our author-
ing tool), in which the facial expression and body pose
are independently edited in each key-frame after load-
ing a suitable gesture from a motion capture database.
First, the staff member manually creates the anima-
tion for Script #1 sentence by sentence and uses it di-
rectly in Script #2 for the same block of sentences.
Then, the staff member manually improves the ani-
mation for Script #2. With this processing, we ana-
lyze the important issues in manual operation by not-
ing the differences among the animations. Firstly, we
observe that our staff member needs to modify the du-
ration of gestures to fit with the speech. For example,
the punching gesture is used for the italic parts in both
AccurateSynchronizationofGestureandSpeechforConversationalAgentsusingMotionGraphs
7

Figure 1: A graph structure with node, edge, weight, and
length is constructed in the S phase.
scripts. The cycle number for Script #1 is four while
it is changed to six for Script #2. Secondly, we ob-
serve that our staff member changes the timing of the
gesture to fit with the speech. For example, the peak
of the hand-lifting motion is arranged to match with
the word “let’s go”. Note that it takes a lot of time for
our staff member to synchronize the gestures with the
speech.
3.2 Synchronization Algorithm
Discovering the algorithm-friendly guideline in Sec-
tion 3.1 let us view the synchronization problem as
a motion synthesis problem, with both duration and
timing issues satisfied automatically as the constraints
of our algorithm. Based on the fact that many ges-
tures are cyclic or have similar poses, we adopt the
motion graph technique (Kovar et al., 2002; Arikan
and Forsyth, 2002; Lee et al., 2002) in this paper
upon considering the gesture’s structure. Further-
more, we extend the original definition of motion
graph by adding the meta data like edge weights and
edge lengths, which is specially designed for our task.
By using the motion graphs, a new motion can be gen-
erated efficiently using dynamic programming (Kovar
et al., 2002; Xu et al., 2011), which is applicable to
our synchronization task. Then, we refine the ani-
mation in an additional step, resulting in a two-step
synchronization algorithm.
3.2.1 Coarse Synchronization with Motion
Graphs
Motion Graph Construction. Considering the struc-
ture of a gesture, we construct a graph structure in
and only in the stroke (S) phase for each gesture in
the database, as shown in Fig. 1. As many conver-
sational agent systems do (Neff et al., 2008; Marsella
et al., 2013), the labeling data for gesture structures
are created manually, which is acceptable because
the number of gestures is not excessive. Similar to
(Kovar et al., 2002; Arikan and Forsyth, 2002; Lee
et al., 2002), the motion graphs consist of nodes and
edges. In addition, edge weights and edge lengths
as defined in this paper are designed to measure the
smoothness and duration of motion. All the key-
frames V = {t
1
,t
2
, · ·· , t
N
} in the S phase are selected
as nodes. Two neighboring key-frames t
i
and t
i+1
are
connected by a uni-directional edge e
i,i+1
, whose di-
rection is the temporal direction. The edge weight
w
i,i+1
of a uni-directional edge is zero and its edge
length L
i,i+1
is the number of frames between the two
nodes t
i
and t
i+1
. Two similar key-frames t
i
and t
j
are connected by a bi-directional edge e
i, j
, where the
similarity or frame distance d(t
i
,t
j
) is calculated as
the weighted difference of joint orientations (Wang
and Bodenheimer, 2003) as shown in Eq. (1).
d(t
i
,t
j
) =
M
∑
m=1
w(m) k log(q
−1
j,m
q
i,m
) k
2
(1)
where M is the joint number, w(m) denotes the joint
weight, and q
i,m
is the orientation of joint m in the i-
th key-frame. The edge weight w
i, j
of a bi-directional
edge is the above frame distance and its edge length
L
i, j
is zero. For smooth transitions, motion blend-
ing is performed by the SLERP technique (Shoemake,
1985) for each bi-directional edge. Note that the
above construction process can be performed off-line.
Search the Best Path. Given a sentence of script with
timing tags and its speech, our system will show a list
of gesture candidates that match the category of the
text when the creator clicks it in the timeline. For
example, “good morning” is a word in the greeting
category, where gestures like bowing, hand waving,
and light nodding are listed. This rule-based tech-
nique is popular for behavior selection in conversa-
tional agent systems (Cassell et al., 2001; Marsella
et al., 2013). Then the creator will select the best
choice interactively. However, the original gesture
motion in the database cannot always be a good match
for the speech. In this section, our task is to generate
a new motion for the given speech.
As (Kovar et al., 2002) pointed out, any path in
the motion graph is a new motion, and we search for
the best one that best satisfies all the following con-
ditions: (1) as smooth as possible, (2) the one with
a length nearest to the desired duration L
tg
, (3) good
connections with the P and R phases. Dynamic pro-
gramming provides an efficient algorithm for motion
graphs to search for the best path (Xu et al., 2011).
Basically, edge weight is used in the cost function for
Condition (1), i.e. cost(e
i, j
) = w
i, j
where w
i, j
denotes
the edge weight from the i-th key-frame to the j-th
key-frame, which may be a uni-directional edge or a
bi-directional edge. For Condition (2), we check the
cumulative length for the desired duration L
tg
as Eq.
(4) shows. For Condition (3), we set the initial node as
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
8
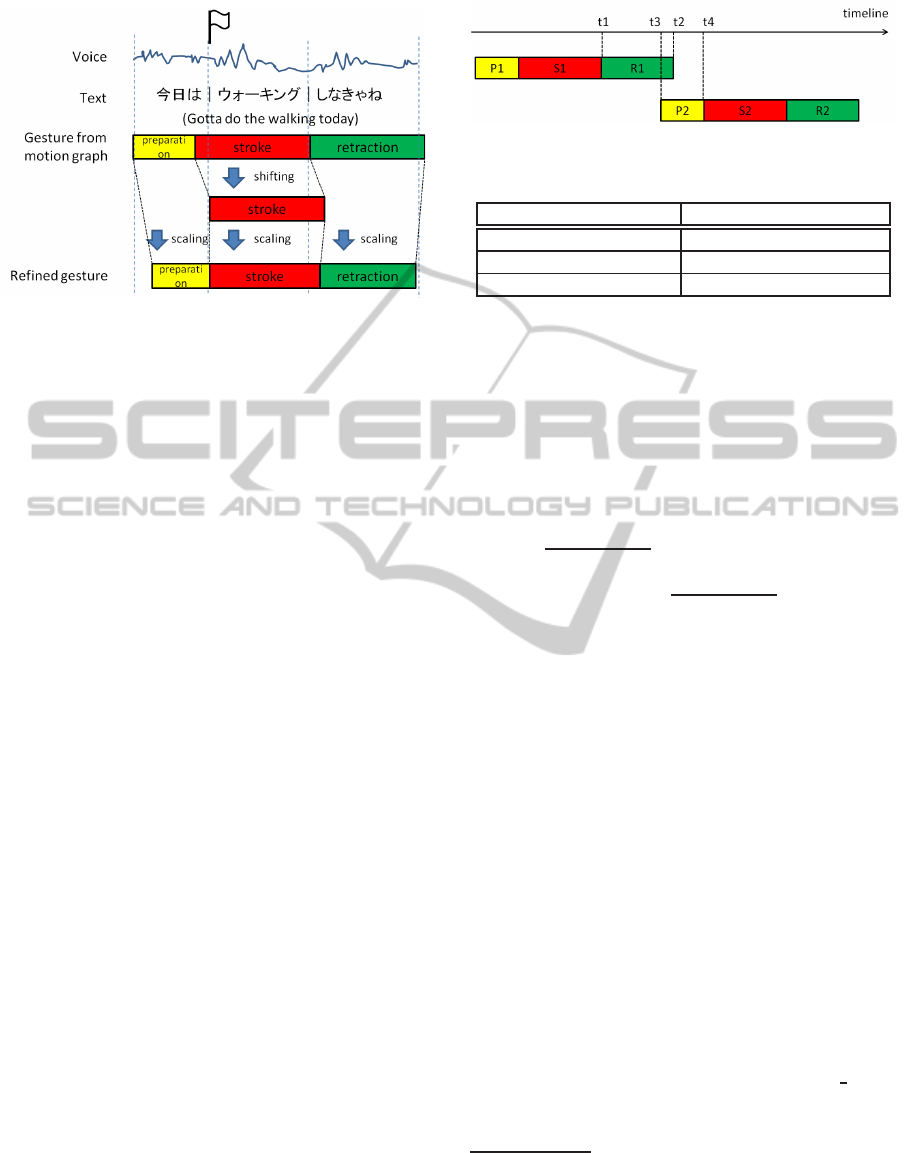
Figure 2: Refine the synchronization by shifting and scaling
the gesture motion, where the black flag shows the desired
timing in the speech.
the first key-frame t
1
in the S phase as Eq. (2) shows,
which makes a natural connection to the P phase. In
addition, we require the last node in the path is the
last key-frame t
N
in the S phase for good connection
to the R phase. Finally, we select the best path with
minimal cost that can satisfy all the three conditions.
This makes the best path a new stroke phase with high
quality and the desired duration.
P(t
v
,1) =
0 if t
v
= t
1
∞ others
(2)
P(t
v
,k) = min
t
i
∈V
{P(t
i
,k−1)+cost(e
i,v
))} (3)
P
∗
= min
L(P(t
N
,k))≥L
tg
{P(t
N
, k)} (4)
where P(t
v
, k) denotes the cost of the best path with
k nodes and the last node of t
v
, P
∗
denotes the best
path for the speech, L(P(t
N
, k)) denotes the cumula-
tive length of the best path P(t
N
, k).
3.2.2 Fine Synchronization with Shifting and
Scaling
In this section, we further improve the accuracy of
synchronization with a shifting and scaling operation.
As shown in Fig. 2, first the stroke (S) phase is shifted
to the desired timing in the speech. Then, the S phase
is scaled to match the desired duration as nearly as
possible. In order to keep the motion natural and
evocative of the desired emotional state, the scaling
factor is limited to the range from 0.9 to 1.1. The
same scaling factor will be used in the preparation (P)
and retraction (R) phases to keep the motion consis-
tency.
Figure 3: Total scheduling of gestures in the timeline.
Table 1: Total scheduling to avoid conflicts.
Conditions Operations
(1) No conflict No change
(2) With slight conflict Scale P2 & R1 phases
(2) With serious conflict Remove P2 & R1 phases
3.2.3 Total Scheduling
In most cases, our two-step algorithm will handle the
duration and timing issues well. However, due to the
preparation and retraction phases, neighboring ges-
tures may conflict with each other as shown in Fig. 3.
We define a rule to avoid such conflicts as shown in
Table 1, where the conditions are (1) t2 ≤ t3 (which
means there is no conflict between R1 and P2), (2)
t2 > t3&
(t2−t1)+(t4−t3)
t4−t1
≤ TH (which means there is a
conflict between R1 and P2 but the conflict is not se-
rious), and (3) t2 > t3&
(t2−t1)+(t4−t3)
t4−t1
> TH (which
means there is a conflict between R1 and P2 and the
conflict is too serious to use the scaling operation), re-
spectively. Note that t1, t2, t3, and t4 are marked in
Fig. 3. TH is a threshold.
4 OVERVIEW OF AUTHORING
TOOL
In this section, we will briefly introduce our sys-
tem, an authoring tool whose interface is shown in
Fig. 4. The purpose of the authoring tool is to
provide a good balance between the creator’s flex-
ibility and his/her efficiency. For example, with
our authoring tool, a staff member can create attrac-
tive animation for lectures even if he/she has little
knowledge of animation creation. To re-use a large
amount of CGM resources in characters and mo-
tions on the Internet, we use the MikuMikuDance for-
mat (http://www.geocities.jp/higuchuu4/index
e.htm)
in our system, which is very successful in Japan and
East Asia
1
. Using some free software, the data in
1
In this paper, the so called MikuMikuDance has three
meanings. First, it may mean the authoring tool used in
Sect. 3.1. Second, it may mean the specifications for mesh
model, motion, and other data in animation. Third, it may
mean a player to show the animation.
AccurateSynchronizationofGestureandSpeechforConversationalAgentsusingMotionGraphs
9
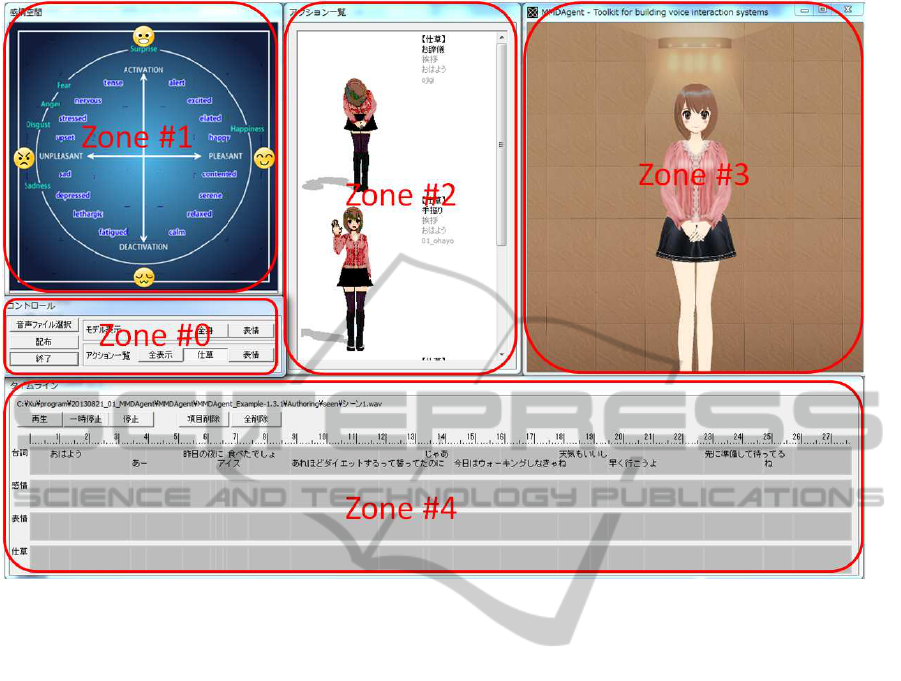
Figure 4: User interface of our authoring tool.
MikuMikuDance format can be transferred from/to
other formats like Maya and Blender.
There are five zones in our authoring tool. The top
left window (Zone #1) in Fig. 4 is an affective space
panel based on the circumplex model (Russell, 1980),
where the creator can select a point and see the result-
ing facial expression in the top right window (preview
window, Zone #3) in real time. The middle left win-
dow (Zone #0) is the control panel, where the creator
can input the audio file and switch the display modes
for the preview windowand the candidate list window
(Zone #2, top middle window in Fig. 4). The bottom
window (Zone #4) shows the timeline for text, affect,
facial expression, and gesture, respectively,which can
be saved as a project file or loaded from a project file.
The creation procedure of a new project is as fol-
lows. First, an audio file and its text file with timing
tags are loaded. The text will be displayed in the time-
line. When a creator clicks a sentence in the timeline,
its audio will be played and some candidate gestures
will be listed in Zone #2. The creator can select the
affect in Zone #1 and the best gesture in Zone #2 to
fit the audio and text. The system will automatically
synthesize a facial expression and gesture motion syn-
chronized with the speech in real time, which will be
displayed in Zone #3. After repeating this step for all
desired sentences, the creator can watch the entire an-
imation by clicking the “play” button in Zone #4. For
those parts without any arrangement from the creator,
the system will automatically deal with it. In addi-
tion, blinking and lip synchronization are automati-
cally embedded in the animation. Finally, the creator
can edit the animation at any time and release it. Note
that facial expression is generated based on the Fa-
cial Action Coding System (FACS) technique (Ekman
et al., 2002), where totally 18 action units are defined
in the case of our system.
5 EXPERIMENTAL RESULTS
AND DISCUSSIONS
In our experience, it takes much less time to create an-
imations with our authoring tool than by manual cre-
ation. Although the creation time is dependent on the
experience of creator (which infers that the detailed
time data have little meaning), it only takes about 10%
of time for our staff member to create the content used
in our experiments by our authoring tool. Moreover,
in our opinion, their quality is almost the same. How-
ever, evaluation of the proposed method is challeng-
ing. Objective evaluation of synchronization is diffi-
cult if not impossible because it is difficult to define
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
10
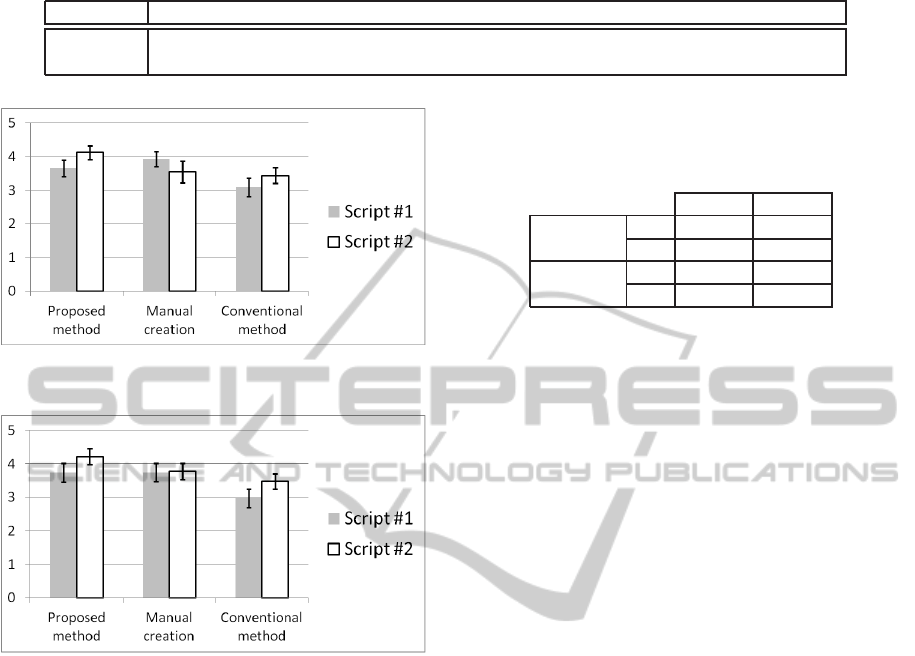
Table 2: Scripts of Twitter comments on a news item about a company’s new software, which are used in subjective evaluation.
Comment Script (Translated from Japanese)
#1 No plan to release it, although they have a Japanese version!
#2 No plan to release a Japanese version! (The company) cannot seem to get motivated.
Figure 5: Mean opinion scores for Q1 in diet scenario. The
standard errors are shown in black lines (±1 SE).
Figure 6: Mean opinion scores for Q2 in diet scenario. The
standard errors are shown in black lines (±1 SE).
the ground truth of synchronization. Currently, sub-
jective evaluation is the only option.
Because our target user is the general consumer,
the participants are non-expert volunteers. In our ex-
periments, eleven participants are asked to evaluate
two kinds of content including the diet scenario (see
details in Section 3.1) and a news comment scenario
(see details in Table 2). The animation of the diet
scenario lasts about 30 seconds, the news comment
scenario about 5 seconds. The 11 participants, 5 male
and 6 female, range in age from their 30s to their 50s,
most with little experience or knowledge of animation
creation.
For the diet scenario, three animations are shown
that come (in random order) from manual creation,
the proposed method, and the conventional method
where the only difference from the proposed method
is that the synchronization algorithm comes from
(Marsella et al., 2013). Two questions (Q1: How
good is the animation quality? Q2: How good is the
synchronization of gesture and speech?) are evalu-
ated using the following rating scheme. 5: Excellent;
Table 3: p values in T-test for diet scenario. PM: Proposed
method vs. Manual creation. PC: Proposed method vs.
Conventional method. Red fonts: p < 0.05. Blue fonts:
p < 0.1.
PM PC
Script #1
Q1 0.4131 0.1443
Q2 0.9817 0.0690
Script #2
Q1 0.1469 0.0422
Q2 0.2050 0.0356
4: Good; 3: Fair; 2: Poor; 1: Bad. The mean opin-
ion scores (MOS) for Q1 and Q2 are listed in Fig. 5
and Fig. 6 respectively, where our method performs
better in all cases than the conventional method, and
in most cases is better than manual creation. Espe-
cially in Script #2, our method performs much better
than manual creation, receiving a MOS of more than
4 (Good) in both Q1 and Q2. This is because manual
creation simply repeats the motion cycles while the
best path in the proposed method provides more vari-
ation. In the animation from the conventional method,
we observe that the gesture’s speed is changed so
much that it becomes unnatural, and synchronization
is not clear due to an unsharp phase boundary, which
explains why the conventionalmethod performs worst
for both Q1 and Q2. T-test results in Table 3 consis-
tently confirm that a significant difference exists in
both Q1 and Q2 for Script #2 between the proposed
method and the conventional method at the 5% sig-
nificance level and p values for Script #1 between
the proposed method and the conventionalmethod are
rather low.
Because the scores are rather different from dif-
ferent participants, we analyze the rank rating of three
methods for the same content. The tally of assigned
No. 1 ranks for Q1 and Q2 are shown in Fig. 7 and
Fig. 8. As you can see, 9 of 11 participants rank our
method No. 1 for Script #2 for Q1 and Q2, which is a
much better evaluation than other methods. Note that
because more than one method may get No. 1 rank
rating, the total number of No. 1 ranking is a little
more than 11 as shown in Fig. 7 and Fig. 8.
For the news comment scenario, we ask the par-
ticipants to choose the better animation: the one pro-
duced by our proposed method or one by the conven-
tional method (presented in random order) in terms of
the two criteria above. For Comments #1 and #2, 8
of 11 participants select the animation produced us-
ing our proposed method. Five participants select our
AccurateSynchronizationofGestureandSpeechforConversationalAgentsusingMotionGraphs
11
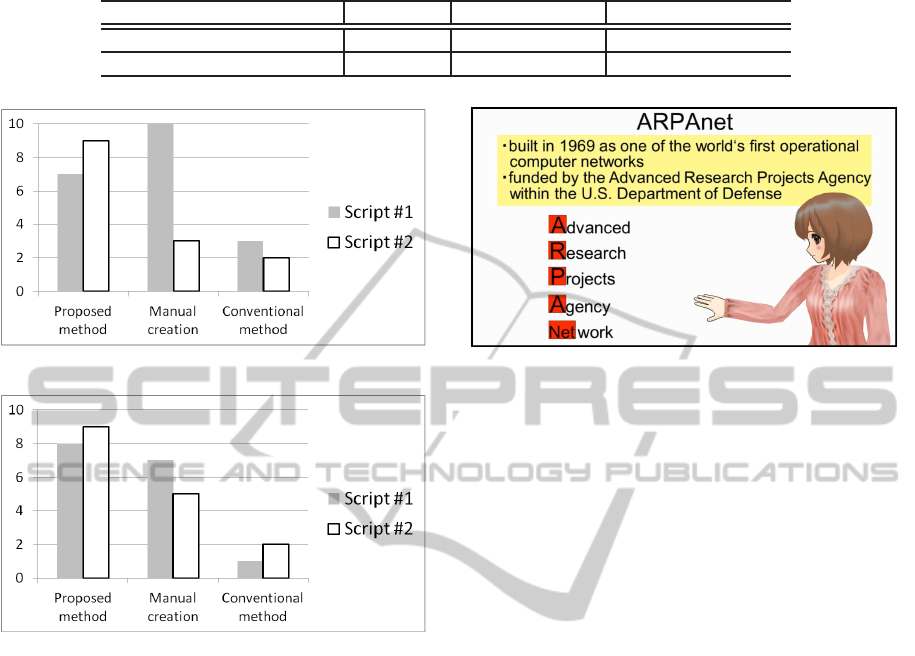
Table 4: Statistics for different gesture styles.
gesture style no gesture regular gestures highlighted gestures
average number of gestures 0.0 9.7 15.3
gesture example - point a finger up beat on the slide
Figure 7: Rank No.1 ratings for Q1 in diet scenario.
Figure 8: Rank No.1 ratings for Q2 in diet scenario.
proposed method in both comments, while none se-
lects the conventionalmethod in both comments. This
suggests that the proposed method is very promising.
6 APPLICATIONS TO
EDUCATION
Using our authoring tool, our staff creates several an-
imations for digital education, where the ECA acts as
a lecturer as shown in Fig. 9. To avoid the possi-
ble bias from different levels of students’ knowledge,
short animations in four different categories are cre-
ated and evaluated by each student including informa-
tion technology, history, chemistry, and geography. In
each content, there is a short slide show with an ECA
that lasts about one minute and a test with three ques-
tions including a question about figures. By selecting
different facial expressions and gestures, three differ-
ent styles of animations are evaluated, which include
no expression, moderate expression, and intensive ex-
pression or no gesture, regular gestures, and high-
lighted gestures. As Table 4 shows, more gestures and
Figure 9: Screen capture of an education animation. Note
that the text in the slide is translated from Japanese. Only
Japanese versions are used in the evaluation.
stronger gestures are used in the style of highlighted
gestures to emphasize the key points in the education
content.
Basically, we want to see the effectiveness of
agent by the scores (percentage of correct answers)
in the test after watching the animations. Totally 34
participants from a university conduct the evaluation
on the animations in four categories, whose styles of
gesture and expression are randomly selected. The
scores for facial expressions and gestures are shown
in Table 5 and Table 6 respectively. The results show
that both the highlighted gestures and intensive ex-
pressions are effective to obtain better scores. Espe-
cially, a high score of 72.7% is obtained in the ques-
tions about figures for the highlighted gestures. A T-
test is performed between no gesture and highlighted
gestures, which gives a significant level of 6.96%. A
similar T-test between no expression and intensive ex-
pressions gives a significant level of 7.74%. Both
are rather near to 5%, which is commonly used as a
significant difference. In addition, many participants
report that the intensive expressions and highlighted
gestures are impressive in the questionnaire.
7 CONCLUSIONS AND FUTURE
WORK
In this paper, we have described an authoring tool we
have implemented to facilitate the creation of high
quality animation for conversational agents, with fa-
cial expressions and gestures that are accurately syn-
chronized with speech. In a precedent case study, we
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
12
Table 5: Average scores (percentage of correct answers) for different gesture styles.
gesture style no gesture regular gestures highlighted gestures
average scores for all questions 56.7 % 60.7 % 66.7 %
average scores for questions about figures 57.4 % 60.0 % 72.7 %
Table 6: Average scores (percentage of correct answers) for different expression styles.
expression style no expression moderate expressions intensive expressions
average scores for all questions 56.3 % 60.0 % 67.4 %
average scores for questions about figures 55.6 % 66.7 % 67.4 %
have investigated the important issues (i.e. duration
and timing) in the manual synchronizing of gesture
with speech, which has led us to consider the synchro-
nization problem to be a motion synthesis problem.
We have proposed a novel two-step solution using the
motion graph technique within the constraints of ges-
ture structure. Subjective evaluation of two scenarios
involving talking and news commentary has demon-
strated that our method is more effective than the con-
ventional method.
In the future, we plan to improve the generation
of facial expressions, where realistic facial dynamics
can further improve animation quality. At the same
time, we are extending the target applications to new
categories such as remote chat and human-robot in-
teraction.
REFERENCES
Arikan, O. and Forsyth, D. (2002). Interactive motion gen-
eration from examples. ACM Transactions on Graph-
ics, 21(3):483–490.
Beskow, J., Engwall, O., Granstrom, B., and Wik, P. (2004).
Design strategies for a virtual language tutor. In
INTERSPEECH-2004, pages 1693–1696.
Cassell, J., Bickmore, T., Billinghurst, M., Campbell, L.,
Chang, K., Vilhj´almsson, H., and Yan, H. (1999). Em-
bodiment in conversational interfaces: Rea. In Pro-
ceedings of the SIGCHI conference on Human Factors
in Computing Systems, CHI ’99, pages 520–527.
Cassell, J., Vilhj´almsson, H. H., and Bickmore, T. (2001).
Beat: the behavior expression animation toolkit.
In Proceedings of the 28th annual conference on
Computer graphics and interactive techniques, SIG-
GRAPH ’01, pages 477–486.
Dutoit, T. (2001). An Introduction to Text-to-Speech Syn-
thesis. Springer.
Ekman, P., Friesen, W. V., and Hager, J. C. (2002). Facial
Action Coding System: The Manual on CD ROM. A
Human Face, Salt Lake City.
Huang, J. and Pelachaud, C. (2012). Expressive body ani-
mation pipeline for virtual agent. In Intelligent Virtual
Agents, volume 7502 of Lecture Notes in Computer
Science, pages 355–362.
Kopp, S., Krenn, B., Marsella, S., Marshall, A., Pelachaud,
C., Pirker, H., Th´orisson, K., and Vilhjlmsson, H.
(2006). Towards a common framework for multi-
modal generation: The behavior markup language.
In Intelligent Virtual Agents, volume 4133 of Lecture
Notes in Computer Science, pages 205–217. Springer
Berlin Heidelberg.
Kovar, L., Gleicher, M., and Pighin, F. (2002). Motion
graphs. ACM Transactions on Graphics, 21(3):473–
482.
Lee, J., Chai, J., Reitsma, P., Hodgins, J., and Pollard, N.
(2002). Interactive control of avatars animated with
human motion data. ACM Transactions on Graphics,
21(3):491–500.
Marsella, S., Xu, Y., Lhommet, M., Feng, A., Scherer, S.,
and Shapiro, A. (2013). Virtual character performance
from speech. In Proceedings of the 12th ACM SIG-
GRAPH/Eurographics Symposium on Computer Ani-
mation, SCA ’13, pages 25–35.
McGurk, H. and MacDonald, J. (1976). Hearing lips and
seeing voices. Nature, 264:746 – 748.
McNeill, D. (1985). So you think gestures are nonverbal?
Psychological Review, 92(3):350–371.
McNeill, D. (2005). Gesture and Thought. University of
Chicago Press.
Miller, L. M. and D’Esposito, M. (2005). Perceptual fu-
sion and stimulus coincidence in the cross-modal in-
tegration of speech. The Journal of Neuroscience,
25(25):5884–5893.
Neff, M., Kipp, M., Albrecht, I., and Seidel, H.-P. (2008).
Gesture modeling and animation based on a proba-
bilistic re-creation of speaker style. ACM Transactions
on Graphics, 27(1):5:1–5:24.
Ng-Thow-Hing, V., Luo, P., and Okita, S. (2010). Synchro-
nized gesture and speech production for humanoid
robots. In Intelligent Robots and Systems (IROS),
2010 IEEE/RSJ International Conference on, pages
4617–4624.
Niewiadomski, R., Bevacqua, E., Mancini, M., and
Pelachaud, C. (2009). Greta: an interactive expres-
sive eca system. In Proceedings of The 8th Interna-
tional Conference on Autonomous Agents and Multi-
agent Systems - Volume 2, AAMAS ’09, pages 1399–
1400.
Nishida, T. (2007). Conversational Informatics: An Engi-
neering Approach. John Wiley & Sons, Ltd.
Noma, T., Zhao, L., and Badler, N. (2000). Design of a
AccurateSynchronizationofGestureandSpeechforConversationalAgentsusingMotionGraphs
13

virtual human presenter. Computer Graphics and Ap-
plications, IEEE, 20(4):79–85.
Oura, K., Yamamoto, D., Takumi, I., Lee, A., and Tokuda,
K. (2013). On-campus, user-participatable, and voice-
interactive digital signage. Journal of The Japanese
Society for Artificial Intelligence, 28(1):60–67.
Russell, J. A. (1980). A circumplex model of affect. Journal
of Personality and Social Psychology, 39(6):1161–
1178.
Shoemake, K. (1985). Animating rotation with quater-
nion curves. In Proceedings of the 12th annual con-
ference on Computer graphics and interactive tech-
niques, SIGGRAPH ’85, pages 245–254.
Stone, M., DeCarlo, D., Oh, I., Rodriguez, C., Stere, A.,
Lees, A., and Bregler, C. (2004). Speaking with
hands: creating animated conversational characters
from recordings of human performance. ACM Trans-
actions on Graphics, 23(3):506–513.
van Luin, J., op den Akker, R., and Nijholt, A. (2001). A
dialogue agent for navigation support in virtual real-
ity. In CHI ’01 Extended Abstracts on Human Factors
in Computing Systems, CHI EA ’01, pages 117–118,
New York, NY, USA. ACM.
ˇ
Cerekoviˇc, A. and Pandˇziˇc, I. (2011). Multimodal behavior
realization for embodied conversational agents. Mul-
timedia Tools and Applications, 54(1):143–164.
Wang, J. and Bodenheimer, B. (2003). An evaluation of
a cost metric for selecting transitions between mo-
tion segments. In Proceedings of the 2003 ACM
SIGGRAPH/Eurographics symposium on Computer
animation, SCA ’03, pages 232–238, Aire-la-Ville,
Switzerland, Switzerland. Eurographics Association.
Xu, J., Takagi, K., and Sakazawa, S. (2011). Motion
synthesis for synchronizing with streaming music by
segment-based search on metadata motion graphs. In
Multimedia and Expo (ICME), 2011 IEEE Interna-
tional Conference on, pages 1–6.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
14
