
Experiments Assessing Learning of Agent Behavior using Genetic
Programming with Multiple Trees
Takashi Ito, Kenichi Takahashi and Michimasa Inaba
Graduate School of Information Sciences, Hiroshima City University, Hiroshima, Japan
Keywords: Genetic Programming, Autonomous Agent, Conditional Probability, Island Model.
Abstract: In this paper, experiments to assess agent behavior learning are conducted to demonstrate the performance
of genetic programming (GP) with multiple trees. Using the methods, each has a chromosome representing
agent behavior as several trees. We have proposed two variants using the conditional probability and the
island model to improve the methods’ performance. In GP using the conditional probability, individuals
with high fitness values are used to produce conditional probability tables to generate individuals in the next
generation. In GP using the island model, the population is divided into two islands of individuals: one
island maintains diversity of individuals. The other emphasizes the accuracy of the solution. Moreover, this
paper improves methods to seek the optimal number of executions of each tree in an individual. Those
methods are applied to a garbage collection problem and a Santa Fe Trail problem. They are compared with
traditional GP, GP with control nodes, and genetic network programming (GNP) with control nodes.
Experimental results show that our methods are effective for improving the fitness.
1 INTRODUCTION
In the field of artificial intelligence, which aims at
modeling human intelligence, many researchers
have studied search algorithms to obtain agent
decisions and action rules to reach a goal.
Reinforcement learning and evolutionary learning
are representative means to learn agent behavior.
Evolutionary methods are known to be able to obtain
optimum rules for agent action in a broad search
space. Among evolutionary methods, genetic
programming (GP) and genetic network
programming (GNP) have been investigated eagerly
and widely (Koza, 1992; Hirasawa et al., 2001; Iba,
2002; Mesot et al., 2002; Tanji and Iba, 2010).
Genetic network programming (GNP) is also known
to able to find better solutions than genetic
programming (GP) can (Hirasawa et al., 2001; Iba,
2002). As an extensional method of GNP, GNP with
multi-start nodes and GNP with control nodes
(GNP
CN
) have been proposed (Murata and
Nakamura, 2006; Eto et al., 2007). Although GNP
CN
can search for better solutions than GNP can, GNP
CN
has some shortcomings. For example, the readability
of GNP
CN
is low because obtained rules are
expressed as a network. Moreover, the network
structure of GNP
CN
corresponding to agent rules
tends not to be fully used. As a method to improve
readability, GP with control nodes (GP
CN
) has been
proposed. In GP
CN
, an individual consists of several
trees that express action rules (Minesaki, Ueda, and
Takahashi, 2009). Each tree is constructed with a
part of a network where the tree root node
corresponds to a control node of GNP
CN
. The
GNP
CN
network structure is divided into several
trees. Therefore, the GP
CN
readability becomes
higher than that of GNP
CN
. However, the GNP
CN
ability is higher than that of GP
CN
.
To improve the GP
CN
ability, we have proposed
GP
CN
using conditional probabilities (GP
CN_CP
)
(Morioka, Ueda, and Takahashi, 2011) and the
island model (GP
CN_IL
) (Ito, Takahashi, and Inaba,
2013). We introduced conditional probabilities
between nodes to use their relations in individuals
with high fitness values. As a similar and more
general idea, frequent trees, i.e., subtrees that
frequently appear in the population, have been
proposed. Chunks of strongly related nodes are
regarded as frequent subtrees (Ono et al., 2012; Ono
et al., 2013). In GP
CN_CP
, individuals in the next
generation are generated using either genetic
operations or conditional probability tables, where
the conditional probability tables are updated using
264
Ito T., Takahashi K. and Inaba M..
Experiments Assessing Learning of Agent Behavior using Genetic Programming with Multiple Trees.
DOI: 10.5220/0004751402640271
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 264-271
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

individuals with high fitness values. Thereby,
GP
CN_CP
can maintain the diversity of individuals
and can inherit the structures of excellent individuals
to the next generation with a high probability, where
the excellent individuals are the individuals that
have obtained appropriate rules for agent behavior in
the environment.
Additionally, we have used the island model to
promote diversity for overcoming local optima and
for improving the fitness because GP
CN
has a
shortcoming: it tends to be trapped by local optima
(Iwashita and Iba, 2002). We designate GP
CN
using
the island model GP
CN_IL
. In GP
CN_IL
, the population
is divided into two islands of individuals: One island
emphasizes maintenance of the diversity of
individuals. The other emphasizes improving fitness.
We designate the former as the diversity-oriented
island. The latter is the performance-oriented island.
The island model can be expected to prevent the
solution by GP
CN_IL
from reaching a local optimum
because GP
CN_IL
can emphasize two points such as
maintaining diversity and improving the fitness.
In this paper, we improve the method to seek the
optimal number of processing nodes activated per
tree (P) by gradually updating the value of P as
evolution proceeds. We designate GP
CN_CP
and
GP
CN_IL
with the improved search method for P
GP
CN_CP
(e) and GP
CN_IL
(e). We apply traditional
GNP
CN
and GP
CN
and our methods, GP
CN_CP
,
GP
CN_IL
, GP
CN_CP
(e), and GP
CN_IL
(e) to a garbage
collection problem and Santa Fe Trail problem to
compare the performance. We use these problems
because the garbage collection problem and the
Santa Fe Trail are used to show the ability of GNP
and GP (Koza, 1992; Mesot et al., 2002; Eto et al.,
2007; Ono et al., 2013; Iwashita and Iba, 2002).
Although the symbolic regression problem exists as
another type of benchmark problem for GP and GNP,
we chose the garbage collection problem and the
Santa Fe Trail problem because the objective of this
paper is to obtain rules for agent actions. The former
is relatively easy, but the latter is difficult.
Experimentally obtained results are presented to
confirm the effectiveness of those methods.
2 GNP WITH CONTROL NODES
(GNP
CN
)
GNP with control nodes (GNP
CN
) has been proposed
as an extensional method of GNP; GNP
CN
can
search for better solutions than GNP. Each
individual of GNP
CN
has a network structure in
which nodes of three kinds are connected: control
nodes, branch nodes, and action nodes. Nodes of the
latter two kinds are also used in GNP. An example
of an individual of GNP
CN
is presented in Figure 1.
The control node in GNP
CN
controls the transition of
nodes that an agent refers to. Each control node has
a number representing the order of its execution. An
agent starts to refer to the node indicated by the
control node 1 and continues referring to nodes
according to the network connection until the
designated number of action nodes is executed.
Subsequently the agent refers to the control node
with the next number and carries out the node
designated by the control node. The agent refers to
the control node with the smallest number after the
control node with the largest number is processed.
Genetic operations of GNP
CN
are only crossover and
change of node connection. The connection of
control nodes is not changed by genetic operations.
3 GENETIC PROGRAMMING
WITH CONTROL NODES
(GP
CN
)
3.1 Genetic Programming with Control
Nodes (GP
CN
)
To improve the readability of GNP
CN
and to
maintain its efficiency, GP
CN
has been proposed. An
example of an individual of GP
CN
is depicted in
Figure 2. Individuals of GP
CN
comprise several trees
which correspond to rules. The trees have numbers
corresponding to numbers of control nodes. The
number indicates the order in which an agent refers
to a tree. The trees correspond to networks starting
from control nodes of GNP
CN
. The number of trees
in one individual, M (i.e. the number of control
nodes), is determined in advance. In the action phase
of autonomous agents, agents receive perceptual
information from the environment and determine
actions by referring to trees according to the tree
numbers.
A tree comprises terminal nodes and non-
terminal nodes. A terminal node denotes an action
that an agent can execute. A non-terminal node
denotes branch information by the perceptual
information. An agent refers to a tree with the
smallest number and carries out an action according
to the tree. When the number of actions that an agent
carries out using the tree exceeds a designated
number P, the agent refers to a tree with the next
number. The number P represents the number of
ExperimentsAssessingLearningofAgentBehaviorusingGeneticProgrammingwithMultipleTrees
265

Figure 1: Example of an individual of GNP
CN
.
Figure 2: Example of an individual of GP
CN
where the
number of trees is 4.
executions. After the tree with the largest number is
processed, the agent refers to the tree with the
smallest number.
The algorithm of GP
CN
is the same as that of the
traditional GP. First, GP
CN
performs the initial
generation of the population of individuals. Then, it
evaluates the fitness of each that has been generated.
If the condition to terminate processing is not met,
then it performs reproduction of the population of
individuals and genetic operations. It then generates
a population of individuals in the next generation.
Here, the condition to terminate processing is that
the number of generation becomes the designated
number of generations. Although the GP
CN
individuals have several trees, the fitness is
evaluated for each individual, not for each tree.
Details of the genetic operations for GP
CN
are
described in the next subsection.
3.2 Genetic Operations
Because one individual has several trees unlike
normal GP in GP with control nodes (GP
CN
), for
each genetic operation an individual is selected at
random. then one tree is selected at random from the
selected individual. Each genetic operation is
applied to the selected tree.
3.2.1 Crossover
Crossover is the operation that exchanges subtrees in
trees of two parent individuals. First, two trees are
selected from two parent individuals respectively,
and nodes are selected at random for crossover from
all nodes of each tree. Second, subtrees whose root
nodes are the selected nodes are exchanged.
However, no crossover is executed when a tree
consists only of a root node.
3.2.2 Mutation
We use mutation of two kinds: a mutation-tree and a
mutation-node. A mutation-tree is an operation that
randomly selects one node from all nodes in a tree of
a parent individual and then replaces the subtree
subsequent to the selected node with a randomly
generated subtree. The mutation-node is the
operation that changes the content of the selected
node after selecting a node in a tree of a parent
individual. In mutation-node, if the selected node is
a non-terminal (terminal) node, then the node
content is replaced with another content of a non-
terminal (terminal) node. When any content of a
non-terminal node is changed, the edge number
might change. If the number of edges of a new
content becomes smaller, then the extra edges and
the succeeding subtrees are removed. However, if
the number of edges becomes larger, then randomly
generated subtrees are connected to the increased
edges.
3.2.3 Inversion
The inversion operation selects only a non-terminal
node at random from all nodes of a tree in a selected
individual, selects at random two child nodes. Then
it exchanges the subtrees that have the two child
nodes as the root nodes.
3.3 GP
CN
using Conditional
Probabilities (GP
CN_CP
)
In GP
CN
, a problem that the search ability is
insufficient exists. In order to utilize connections
among nodes of trees in individuals with high fitness
values, GP
CN
using conditional probabilities
(GP
CN_CP
) has been proposed. The GP
CN_CP
algorithm is the following.
Individual
(
M=4
)
C1 C2 C3 C4
Identifier
Non-terminal node Terminal node
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
266

1: BEGIN
2: Generate initial population;
3: WHILE(i < N
g
) DO
4: Evaluate fitness;
5: WHILE(j < N
i
) DO
6: IF(Fit[j] >= T
f
) THEN
7: Add node counts to frequency
tables;
8: END IF
9: j++;
10: END DO
11: Build conditional probability
tables;
12: j=0;
13: WHILE(j < N
i
) DO
14: IF(j < N
cp
) THEN
15: Generate an individual using
conditional probability tables;
16: ELSE
17: Generate an individual with
genetic operations;
18: END IF
19: j++;
20: END DO
21: i++;
22: END DO
23: END.
In the GP
CN_CP
algorithm, i and j respectively
denote the generation number and the individual
number. N
g
and N
i
respectively represent the
maximum generation number and the maximum
individual number. Moreover, Fit[j] is the fitness
value of individual j. T
f
stands for the fitness
threshold to build conditional probability tables, and
N
cp
signifies the maximum number of individuals
generated using conditional probability tables.
GP
CN_CP
differs from GP
CN
in the way of
generating individuals for the next generation. In
GP
CN_CP
, trees of individuals in the next generation
are generated using conditional probabilities in
addition to genetic operations. The conditional
probabilities are calculated from individuals with
high fitness values and are stored into conditional
probability tables for nodes.
Conditional probability tables are produced per
tree number using frequency tables that are produced
using individuals with high fitness values. We
expect to obtain action rules corresponding to roles.
First, frequency tables are made by counting the
frequency of child nodes attached to branching
edges for perceptual information of each
nonterminal node in trees of which the numbers are
the same over individuals. Additionally, we maintain
the diversity of individuals by inheriting frequency
tables of the previous generation at a constant rate to
the next generation. We update the values in the
frequency tables as follows.
1α
α
(1)
Therein, F
t
(i) is the next frequency table for tree i,
F
tp
(i) is the frequency table used in the previous
generation, and F
tc
(i) is the frequency table
evaluated using only individuals of the current
generation. We designate
1α
as the inheritance
probability, where α∈
0,1
. The frequency table for
tree i in the current generation is calculated from
trees whose number is i in the individuals with high
fitness values in the current generation. We
designate the individuals with high fitness values as
elite individuals. We produce conditional probability
tables from the frequency tables.
We generate individuals using conditional
probabilities. In generating individuals using
conditional probabilities, the root node of a tree is
determined with the occurrence probability of each
node. Then, we determine child nodes of the root
node using the conditional probability table for the
root node. The decisions of child nodes using
conditional probabilities are repeated until a terminal
node is selected for the child node or until the depth
of the child node reaches the maximum depth
determined in advance. When the child node depth is
the maximum depth, a terminal node is selected for
the child node.
3.4 GP
CN
using the Island Model
(GP
CN_IL
)
A shortcoming of traditional GP
CN
is that it tends to
end the search with local optima when evolution
proceeds. We propose GP
CN
using the island model
(GP
CN_IL
) as a method to improve the performance.
The objective of GP
CN_IL
is to increase the fitness
while maintaining the diversity. The island model is
a parallel distributed processing method which has
been proposed as an extension of the genetic
algorithm. In GP
CN_IL
in this study, individuals are
divided into two islands of individuals: the diversity-
oriented island and the performance-oriented island.
A flowchart of GP
CN_IL
is presented in Figure 3,
where N
g
represents the maximum generation
number. First, we generate an initial population.
Second, we evaluate the population of individuals
and perform migration, which is one feature of the
island model. Subsequently if the termination
condition is not satisfied, then we perform selection
and generate individuals of the next generation. The
termination condition is the same as GP
CN
: when
the number of generations reaches the designated
number, the algorithm stops.
We preserve elite individuals and generate
individuals of the next generation by crossover in
ExperimentsAssessingLearningofAgentBehaviorusingGeneticProgrammingwithMultipleTrees
267
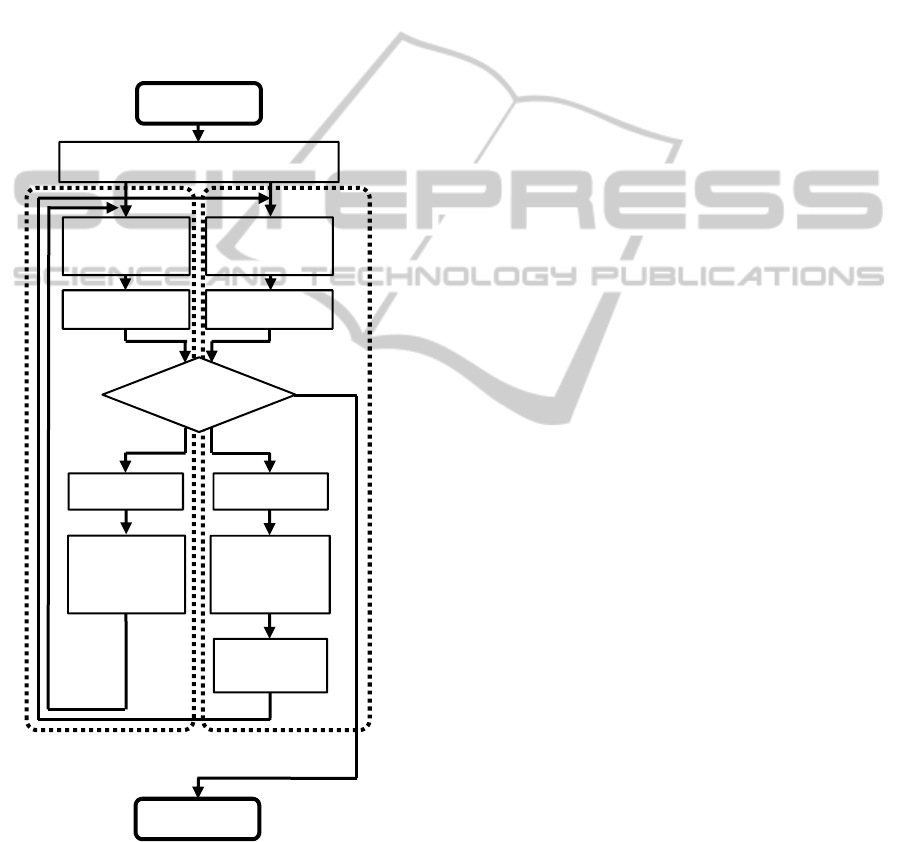
the performance-oriented island. However, in the
diversity-oriented island, we generate individuals of
the next generation by replacing some individuals
with randomly generated individuals and using
genetic operations. Crossover used in the
performance-oriented island is the depth-dependent
crossover (Ono et al., 2012). Unlike the normal
crossover, the depth-dependent crossover determines
a depth in the selected tree at random and then
selects a node for the crossover from nodes at that
depth. Consequently, a destructive crossover is
unlikely to occur. Individuals with high fitness
values are preserved (Iwashita and Iba, 2002).
Figure 3: Flowchart of GP
CN_IL
.
3.5 Search for the Optimal Value of P
We think that optimal values of the number of
control nodes (C) and the number of executions (P),
which is the number of action nodes repeatedly
processed in a tree differ according to the problem to
be solved and the size of action rules. Therefore, we
propose GP
CN
(e), GP
CN_CP
(e), and GP
CN_IL
(e), which
are extensions of GP
CN
, GP
CN_CP
, and GP
CN_IL
respectively, to obtain optimal values of P by
evolution. Let P
i
denote the value of P at generation
i. Then P is updated as follows.
(2)
In (2), is the range for updating the value of P, and
P
0
=TotalSteps/C, where TotalSteps and C
respectively represent the maximum simulation steps
and the number of trees. For example, when
TotalSteps is 250, and an individual has two trees,
i.e. C=2, then the value of P
0
is selected as 125. The
value of is chosen randomly between [-,+]. The
initial value of is 12 for a garbage collection
problem and 16 for the Santa Fe Trail problem. The
values of are decreased respectively to 1 at every
100 and 1,000 generations for the garbage collection
problem and the Santa Fe Trail problem. The value
is selected independently for each tree.
4 EXPERIMENTS
4.1 Garbage Collection Problem
The objective of a garbage collection problem is that
an agent picks up all pieces of trash scattered in the
field and carries them to a garbage dump site. An
example of the field of the garbage collection
problem is depicted in Figure 4. Field comprises a
two-dimensional lattice plane of the size 11×11 cells,
and the outermost cells are walls. The garbage
collection problem has one agent, ten pieces of trash,
and one dump site on the field. The agent can move
forward, turn left or right, or stay at each step. The
agent can also pick up a piece of trash by reaching
the cell where it exists and then can carry it to the
dump site. The maximum number of pieces of trash
that the agent can carry is assumed as two. We
prepare 10 environments generated by placing the
agent, trash, and the dump site at randomly selected
cells in advance. We define the fitness as the number
of total pieces of trash carried to the dump sites in
the 10 environments in 250 steps per environment.
Let N
i
denote the number of collected pieces of trash
in environment i. Then, the fitness value is
calculated as shown below.
Generate initial population
Selection
Genetic
o
p
erations
Start
Yes
No
Evaluation
of fitness
Evaluation
of fitness
Migration Migration
Selection
Depth-
dependent
crossover
Exchange with
random
individual
Performance-
oriented island
Diversity-
oriented island
Stop
Generation numbe
r
< N
g
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
268

Figure 4: Example of the field of a garbage collection
problem.
(3)
The maximum value of Fitness is 100. In
experiments, we measure the highest fitness value
obtained in a simulation run at each generation and
calculate the average of those fitness values obtained
through 30 simulation runs.
Table 1 presents the functions of non-terminal
nodes and terminal nodes in the garbage collection
problem. We have nodes of two kinds: 0 denotes
non-terminal nodes (branch nodes), and 1 denotes
terminal nodes (action nodes). Table 2, Table 3, and
Table 4 respectively show parameters of GNP
CN
,
GP
CN
, GP
CN_CP
, and GP
CN_IL
used for experiments.
Figure 5 shows the change of the average fitness of
the garbage collection problem obtained for 1,000
generations. Therein, the vertical axis expresses the
fitness values; the horizontal axis expresses the
generation number. Figure 5 shows that GP
CN_CP
(e)
and GP
CN_IL
(e) show good performance in both the
maximum fitness and the evolution rate. GP
CN_CP
(e)
and GP
CN_IL
(e) are methods in which the optimal
value of P is sought. Consequently, the method to
obtain the optimal value of P is effective for
improving the performance.
Comparison of GP with GNP
CN
shows that
GNP
CN
has better capability than GP
CN
. Comparison
of GP
CN
with GP
CN_CP
shows the effectiveness of the
conditional probabilities. Moreover, comparison of
GP
CN
with GP
CN_IL
shows that the island model is
effective for improving the fitness, and that the
island model gives higher improvement than the
conditional probability tables do.
The experiments of the garbage collection
problem confirmed that using conditional
Table 1: Function of non-terminal nodes and terminal
nodes.
kind function (number of edges)
0
check the distance from the agent to the dump
site (3)
0 how many pieces of trash the agent has (3)
0
check the direction of the agent to the dump
site (8)
0
check the direction of the agent to the nearest
trash (9)
0
check the direction of the agent to the second
nearest trash (9)
1 move forward (1)
1 turn right (1)
1 turn left (1)
1 stay (1)
Table 2: Parameters of GNP
CN
.
Maximum number of
generations
1,000
Population size 300
Number of nodes 18
Crossover probability of
nodes, P
c
0.1
Probability of changing
connection of nodes, P
m
0.01
Number of control nodes 10
Table 3: Parameters of GP
CN
and GP
CN_CP
.
Maximum number of
generations
1,000
Population size 300
Tournament size 2
Elite number 1
Probability of mutation-
node, P
mn
0.05
Probability of mutation-
tree, P
mt
0.1
Crossover probability, P
c
0.8
Inversion probability, P
i
0.2
Number of population
generated by conditional
probability
75
Maximum depth of trees 6
Probability of changing
value of P, P
P
0.05
probabilities and the island models is effective. We
also ascertained that the readability of GP
CN
is
higher than GNP
CN
by examining the obtained trees
and the network.
4.2 Santa Fe Trail Problem
In the Santa Fe Trail problem, an agent must obtain
action rules to pick up all pieces of food in the field
agent
collection
place
trash
ExperimentsAssessingLearningofAgentBehaviorusingGeneticProgrammingwithMultipleTrees
269

Table 4: Parameters of GP
CN_IL
.
Performance-
oriented island
Diversity-
oriented island
Maximum
number of
generations
1,000
Population size 150 150
Tournament
size
4 2
Number of
elites
1 0
Probability of
mutation-node,
P
mn
0 0.2
Probability of
mutation-tree,
P
mt
0 0.1
Crossover
probability, P
c
1.0 0.8
Inversion
probability, P
i
0 0.1
Migration size 100
Maximum
depth of trees
6
Probability of
changing value
of P, P
P
0.05
Figure 5: Change of fitness of the garbage collection
problem obtained for 1,000 generations.
efficiently. The Santa Fe Trail problem field is
depicted in Figure 6. A two-dimensional lattice
plane comprises 32×32 cells. The Santa Fe Trail
problem has one agent and 89 pieces of food in the
field. The agent and the food are placed in
determined cells. The agent can move forward, turn
left or right, and stay in each step. Additionally, the
agent can pick up a piece of food by reaching the
Figure 6: Field of Santa Fe Trail problem.
Table 5: Function of non-terminal nodes and terminal
nodes.
kind function (number of edges)
0 if there is food ahead (2)
0 act X; then Y (2)
0 act X, then Y; then Z (3)
1 move forward (1)
1 turn right (1)
1 turn left (1)
cell in which it exists. We define the fitness as the
total number of pieces of food picked up in 400
steps. The maximum number of fitness is 89. The
population size is 500, and the maximum generation
number is 10,000. In experiments, we measure the
highest fitness value obtained in a simulation run at
each generation and calculate the average of those
fitness values obtained through 30 simulation runs.
Table 5 presents the functions of non-terminal
nodes and terminal nodes in the Santa Fe Trail
problem. We have nodes of two kinds: 0 denotes
non-terminal nodes (branch nodes), and 1 denotes
terminal nodes (action nodes).
Figure 7 shows the change of the average fitness
of the Santa Fe Trail problem obtained for 10,000
generations. Therein, the vertical axis expresses the
fitness values; the horizontal axis expresses the
generation number. Figure 7 shows that GP
CN_CP
and
GP
CN_IL
show better performance than GP
CN
in terms
of the maximum fitness and the evolution rate,
which indicates that the conditional probability
tables and the island model are effective to improve
the fitness. However, the fitness values of
GP
CN_CP
(e) and GP
CN_IL
(e) are lower than those of
GP
CN_CP
and GP
CN_IL
. The search method for the
optimum number of execution P does not work well
in this problem. We must examine the cause further.
In the experiment, the GNP
CN
performance is
low because the PROG function is not implemented.
For the Santa Fe Trail problem, introducing the
conditional probability for generation of individuals
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
100,0
0 200 400 600 800 1000
GNP_CN
GP_CN
GP_CN(e)
GP_CNCP
GP_CNCP(e)
GP_CNIL
GP_CNIL(e)
Fitness
Generation
s
GNP
CN
GP
CN
GP
CN
(e)
GP
CN_CP
GP
CN_CP
(e)
GP
CN_IL
GP
CN_IL
(e)
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
270

Figure 7: Change of fitness of Santa Fe Trail obtained for
10,000 generations.
and the island model also shows their effectiveness
to improve the fitness.
5 CONCLUSIONS
We applied our methods, GP
CN_CP
, GP
CN_IL
,
GP
CN_CP
(e), and GP
CN_IL
(e) to a garbage collection
problem and the Santa Fe Trail problem, to assess
their performance. In those problems, our methods
show good performance in both the maximum
fitness and the evolution rate. The authors consider
that using conditional probabilities and the island
model prevented the solution from reaching a local
optimum. Additionally, results show that the method
to obtain the optimal value of P improves the fitness.
To improve the fitness of the sub-population of
GP
CN_IL
, our future work will integrate the
conditional probability shown to be effective into
GP
CN_IL
.
This research was in part supported by a
Hiroshima City University Grant for Special
Academic Research (General).
REFERENCES
Koza, J. R., 1992. Genetic Programming: On the
Programming of Computers by Natural Selection,
Cambridge, MA: MIT Press.
Hirasawa, K., Okubo, M., Katagiri, H., Hu, J., and Murata,
J., 2001. Comparison between Genetic Network
Programming and Genetic Programming Using
Evolution of Ant’s Behaviors, IEEJ Transactions on
Electronics, Information and System, Vol.121, No.6,
pp.1001-1009.
Iba, H., 2002. Genetic Algorithm, Igaku Shuppan. Japan.
Mesot, B., Sanchez, E., Pena, C.-A., and Perez-Uribe, A.,
2002. SOS++: Finding Smart Behaviors Using
Learning and Evolution, Eighth International
Conference on the Simulation and Synthesis of Living
Systems (Alife 8), Artificial Life 8, pp.264-273.
Tanji, M., and Iba, H., 2010. A New GP Recombination
Method Using Random Tree Sampling, IEEJ
Transactions on Electronics, Information and Systems,
Vol.130, No.5, pp.775-781.
Iba, H., 2002. Genetic Programming, University of Tokyo
Press.
Murata, T., and Nakamura, T., 2006. Multi-Start Node
Genetic Network Programming for Controlling
Multiple Agents, 2006 IEEE International Conference
on Systems, Man, and Cybernetics, Vol.3, pp.1927-
1932.
Eto, S., Mabu, S., Hirasawa, K., Huruzuki, T., 2007.
Genetic Network Programming with Control Nodes,
2007 IEEE Congress on Evolutionary Computation
(CEC2007), pp.1023-1028.
Minesaki, T., Ueda, H., and Takahashi, K., 2009.
Comparison experiment using Genetic Network
Programming, The Conference Program of the 2009
(60th) Chugoku-branch Joint Convention of Institutes
of Electrical and Information Engineers, p.546.
Morioka, T., Ueda, H., and Takahashi, K., 2011. Efficient
Evolutionary Learning of Agent Behavior by Genetic
Programming Using the Conditional Probabilities,
Proc. of 12
th
International Symposium on Advanced
Intelligent System 2011 (ISIS2011), pp.342-345.
Ito, T., Takahashi, K., Inaba, M., 2013. Improvement of
Genetic Programming with multiple trees, 2013 IEEE
SMC Hiroshima Chapter Young Researchers'
Workshop Proceedings, pp.9-12.
Ono, K., Hanada, Y., Shirakawa, K., Kumano, M., Kimura,
M., 2012. Depth-dependent crossover in genetic
programming with frequent trees, 2012 IEEE
International Conference on Systems, Man, and
Cybernetics, pp.359-363.
Ono, K., Hanada, Y., Kumano, M., Kimura, M., 2013.
Island model genetic programming based on frequent
trees, 2013 IEEE Conference on Evolutionary
Computation (CEC2013), pp.2988-2995.
Iwashita, M., and Iba, H., 2002. Parallel Distributed GP
with Immigrants Aging and Depth-dependent
Crossover, Transactions of Information Processing
Society of Japan, Vol.43, No.SIG10, pp.146-156.
0
10
20
30
40
50
60
70
80
0 2000 4000 6000 8000 10000
GNP_CN GP_CN
GP_Cne GP_CNCP
GP_CNCPe GP_CNIL
GP_CNILe
Fitness
Generation
GNP
CN
GP
CN
(e)
GP
CN_CP
(e)
GP
CN_IL
(e)
GP
CN
GP
CN_CP
GP
CN_IL
ExperimentsAssessingLearningofAgentBehaviorusingGeneticProgrammingwithMultipleTrees
271
