
Using Robot Skills for Flexible Reprogramming of Pick Operations in
Industrial Scenarios
Rasmus S. Andersen
1
, Lazaros Nalpantidis
1
, Volker Kr¨uger
1
, Ole Madsen
1
and Thomas B. Moeslund
2
1
Department of Mechanical and Manufacturing Systems, Aalborg University, Aalborg, Denmark
2
Department of Architecture, Design and Media Technology, Aalborg University, Aalborg, Denmark
Keywords:
Robot Vision, Robotic Skills, Industrial Robots, Tabletop Object Detector.
Abstract:
Traditional robots used in manufacturing are very efficient for solving specific tasks that are repeated many
times. The robots are, however, difficult to (re-)configure and (re-)program. This can often only be done by
expert robotic programmers, computer vision experts, etc., and it requires additionally lots of time. In this
paper we present and use a skill based framework for robotic programming. In this framework, we develop a
flexible pick skill, that can easily be reprogrammed to solve new specific tasks, even by non-experts. Using
the pick skill, a robot can detect rotational symmetric objects on tabletops and pick them up in a user-specified
manner. The programming itself is primarily done through kinesthetic teaching. We show that the skill
has robustness towards the location and shape of the object to pick, and that objects from a real industrial
production line can be handled. Also, preliminary tests indicate that non-expert users can learn to use the skill
after only a short introduction.
1 INTRODUCTION
In modern manufacturing industries automation us-
ing robots is very widespread, and automation has for
several decades proven its potential to increase pro-
ductivity many times. Still, areas exist where automa-
tion has not gained the same foothold. This is for
instance the case in small to medium sized compa-
nies, where investment in automated production lines
can be too big a risk. Also in large companies, au-
tomated production lines are typically required to run
for several years to justify the investment. This can
be a problem in shifting markets where consumer de-
mand cannot always be predicted accurately, even for
few years into the future. Especially for newproducts,
there is a need for gradually increasing production, in-
stead of constructing fully automated production lines
all at once.
To make industrial robots better suited for these
scenarios, it has been identified that improved con-
figuration options and human-robot interaction are
core requirements (EUROP, 2009). In short, making
robots more flexible and easier to reconfigure and re-
program is a necessity for future manufacturing. In
this paper we address the issue of making robot pro-
gramming fast and flexible by taking advantage of a
skill-based framework, which is described in Section
2.1.
The contribution of this paper is to show how such
a skill-based framework can be used to develop a flex-
ible vision-based pick skill, which fast and easily can
be reprogrammed by non-experts. The developedpick
skill uses a depth sensor to locate rotational symmet-
ric objects, and then picks them up using a small num-
ber of taught parameters.
The paper is organized as follows: In Section 2.1
the concept of robotic skills is introduced. Both re-
lated research and the interpretation used here is pre-
sented. In Section 2.2 basic methods for performing
object detection is described, and on this basis the ap-
proach taken here is presented.
In Section 3 the complete proposed system is de-
scribed, consisting of a robot system (Section 3.1), a
tabletop object detector (Section 3.2), and an integra-
tion of this into a pick skill (Section 3.3). Experimen-
tal results are presented in Section 4; first in Sections
4.1 and 4.2 with regards to robustness against varia-
tions in position and shape of the object to pick. In
Section 4.3 the skill is tested on parts from an indus-
trial production line from the Danish pump manufac-
turer Grundfos A/S, and in Section 4.3 reprogram-
ming (teaching) of the pick skill is tested on non-
expert users. Conclusions are finally drawn in Section
5.
678
S. Andersen R., Nalpantidis L., Krüger V., Madsen O. and Moeslund T..
Using Robot Skills for Flexible Reprogramming of Pick Operations in Industrial Scenarios.
DOI: 10.5220/0004752306780685
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 678-685
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 BASIC CONCEPTS AND
RELATED WORK
The central concepts for the pick skill presented in
this paper are robotic skills and object detection.
These are covered here.
2.1 Robotic Skills
The concept of robotic skills it not new, and a sig-
nificant amount of literature has attempted to define
the concept in the most generic, useful way. The pur-
pose of a robotic skill is to encapsulate complicated
knowledge and present itself to a non-expert user in a
way that allows the user to exploit this skill to make
the robot perform new, repeatable operations on ob-
jects. One of the first to draw attention to this idea are
(Fikes and Nilsson, 1972) with their STRIPS planner.
Their focus is to make it possible to perform auto-
matic planning of how to get from an initial state to
a goal state by combining a set of simple actions or
skills. In (Archibald and Petriu, 1993), the idea of
skills is further generalized in a framework known as
SKORP. Here, the focus is both on what a skill should
consist of, and also on developing a (at the time) mod-
ern and user friendly interface to enable workers to
program robots faster.
A broader view is taken in (Gat, 1998), where
the complete planning and control structure of robots
is treated. It is argued that a traditional sense-plan-
act (SPA) architecture is insufficient for robots solv-
ing problems in a complex scenario, and he suggests
instead a three-layered architecture, where all layers
hold their own SPA structure. In the lowest layer, real-
time control is placed. In the highest layer, time inde-
pendent processes are run, that are related to the over-
all task of the robot. The middle layer, the Sequencer,
continuously changes the behavior of the lowest level,
in order to complete a goal. The functionality in this
level can be interpreted as a type of skills, which en-
capsulates the functionality of the lower levels, and
works towards a goal by sequencing hardware-near
actions.
More recently, in (Mae et al., 2011) the three lay-
ered structure is augmented by yet another layer on
top, which contains a high level scenario description
presented in a user friendly interface. This is aimed at
solving manipulation tasks for service robots. The fo-
cus here is also on the architecture, where skills con-
stitute the third layer; just above the hardware control
layer. Another approach to skills are taken at Lund
University, where skills are seen as a means to reuse
functionality across multiple platforms (Bjorkelund
et al., 2011).
We interpret a skill as an object-centered ability,
which can easily be parameterized by a non-expert.
Rather than attempting to develop a large architec-
ture, able to handle general problems in real world,
we focus on making skills very easy and fast to re-
configure by non-expert humans. The focus is there-
fore especially on the human-robotinteraction, and on
the reusability of skills within the domain of tasks that
are frequently required by the manufacturingindustry.
In its essence, a skill in our framework consists of a
teaching part and an execution phase, as illustrated in
Figure 1 (slightly modified from (Bøgh et al., 2012)).
Figure 1: General structure of a skill. A skill consists of
a teaching phase (top) and an execution phase (bottom).
Both during teaching and execution, the skill transforms the
world state in a way, which allows other skills to proceed.
The execution block in the figure captures the
ability of the robot to perform a task. The remain-
ing blocks is what makes this ability into a skill.
The teaching phase is what makes the skill repro-
grammable. Here, the user specifies all parameters,
that transform the skill from a generic template into
something, which performs a useful operation. The
phase is divided into an offline specification part and
an online teaching part. The specification is typically
done while selecting to use this skill to solve (part of)
a task. This can be done using e.g. a computer or a
tablet. In the online teaching most of the parameters
are specified, and this can be carried out using a robot
controller, kinesthetic teaching, human demonstration
etc.
The execution phase consists of the execution
block combined with pre- and postcondition checks
as well as prediction and continuous evaluation. The
precondition check determines if the world state lives
up to the requirements of the skill. For a pick oper-
ation this can for instance include checking whether
the gripper is empty, whether the robot is properly cal-
ibrated, etc. If this check is passed execution can be-
gin. During ongoing execution continuous evaluation
ensures that the skill is executed as expected. When
the execution has finished, a postcondition check de-
termines if the current world state is as predicted. To-
UsingRobotSkillsforFlexibleReprogrammingofPickOperationsinIndustrialScenarios
679

gether, the pre- and postcondition checks of a skill
makes it fit with other skills, and thus allows it to be a
piece in solving larger tasks.
We believe that a framework based on skills has
the potential to increase the speed and ease of the
way humans interact with industrial robots. In this
paper, one such skill based on a tabletop object detec-
tor is proposed, and in Section 3.3 in particular it is
described how it is realized as a skill.
2.2 Object Detection
Object detection, recognition and pose estimation
making it possible to pick certain objects are some of
the most fundamental problems to solve in robot vi-
sion, and many different approaches have been taken.
(Klank et al., 2009) describe some of the most com-
mon methods. A depth sensor is used to detect a plane
surface, and segment point clusters supported by this.
An RGB camera then captures an image, and CAD
models are fitted to the potential objects inside the re-
gions given by the depth sensor. This provides poses
of the objects. Good gripping points have been spec-
ified in advance in accordance with the CAD model,
and one of these is used to pick the object.
Specifically for detecting objects on a surface, the
field has matured enough to methods are available,
e.g. through ROS. In general, these systems how-
ever rely on either predefined CAD models or require
models to be learned before being used. This is a
complicated and often time consuming step, which
is necessary for some objects, but not for all. It is
not always necessary to have a detailed model to be
able to pick, place and handle simple objects. Specifi-
cally for rotational symmetric objects, which are very
common in the industry, a cylindrical model is usu-
ally sufficient for determining their position precisely.
Therefore, it is here chosen to use a containing cylin-
der model to estimate the position of all objects. The
cylinder model is containing in the sense, that the en-
tire object is inside the model. Therefore, the object
can be grasped by opening the gripper more than the
diameter of the cylinder, moving the gripper to the
center point of the cylinder, and closing the gripper
until the force sensors detect contact with the object.
For complicated objects this approach can obviously
cause problems, but for many objects encountered
in industrial manufacturing, it will work satisfactory
without the need for object-specific CAD models. At
the same time, not using models simplifies the process
significantly to human users. A more complicated ob-
ject detector can then be used in situations where the
object is very unsymmetrical.
3 PROPOSED SYSTEM
The proposed system consists of a robot system, a
tabletop object detector, and the integration of this de-
tector into a skill-based structure. These are described
in the following subsections.
3.1 Robot System
The robot system used here is called “Little Helper”
(Hvilshøj and Bøgh, 2011; Hvilshøj et al., 2009), and
it is shown in Figure 2. It consists of a robot arm, a
gripper, and has here a depth sensor mounted on its
end effector.
Figure 2: The robot system consists of a robot arm, gripper,
depth sensor, tabletop, and an object to pick.
In the figure, the robot is about to grasp an object
placed on a tabletop. The tabletop considered in this
work is part of the robotic platform, although any sur-
face within reach of the robot could be used.
The robot arm is a KUKA LWR, which has 7 de-
grees of freedom and supports force control. The
gripper is a traditional parallel gripper. The depth sen-
sor is a PrimeSense Carmine 1.09. This is similar to
the Microsoft Kinect; only smaller and it functions at
distances down to 35 cm. Is has both a RGB camera
and a depth sensor, but here only the depth sensor is
used. This captures the point clouds used for the table
top object detector.
3.2 Tabletop Object Detector
The tabletop object detector described here has been
developed specifically for this system. However, the
type of object detector used is not essential for the
skill-based approach. Thus, any available object de-
tector could in principle be used.
The tabletop object detector takes as input a point
cloud, and outputs the objects which are positioned
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
680

on a supporting plane. The object models used as
containing cylinders, in the sense that they enclose all
points belonging to each object. The center position
and diameter of these cylinders can be used directly
for a pick operation. Figure 3 shows an example of a
segmented point cloud.
Figure 3: The segmented point cloud from the tabletop ob-
ject detector seen from above. Points belonging to the de-
tected plane are red, points belonging to the detected object
are pink, and a green containing cylinder is fitted around the
detected object.
The main steps in the object detector are shown in
Figure 4. The first step is to actually find the dominant
plane in the scene, i.e. the tabletop. This is done using
RANSAC (Fischler and Bolles, 1981), followed by
a least squares fitting to all inliers. The inliers are
colored red in Figure 3.
Figure 4: The main steps in the object detector.
The plane model is often supported by both the
actual tabletop as well as other objects. Therefore, all
inliers are clustered, and the largest cluster is chosen
as the tabletop. Then, a convex hull is fitted around
the tabletop, and it is extended along the norm of the
plane to give a 3D volume. This volume is illustrated
in Figure 3 as gray borders, and all objects supported
by the plane must be within this. The points inside
the volume are clustered, and very small objects as
well as objects “hovering” over the plane are ignored.
Cylinder models orthogonal to the detected plane are
fitted around the rest. In Figure 3 one cylinder model
has been fitted. The cylinders are containing in the
sense that all points are inside or exactly on the bor-
ders of the model.
Finally, each cylinder model is checked for valid-
ity. Cylinders with a center very close to the border
of the table are removed along with cylinders whose
border is partly outside of the plane. This serves both
to remove false objects, and also to remove objects
that are too close to the border to be safely grasped.
3.3 Skill Realization
The purpose of the object detector is to be the core of a
pick skill, which can easily be reprogrammed to solve
new specific pick operations. This requires a number
of other functions, as indicated in Figure 1. The most
essential is which parameters it will be advantageous
for the user to be able to specify and how to do this
most efficiently. For this pick skill the most essential
parameters considered are:
• The camera pose used for detecting objects.
• The orientation of the gripper used for grasping
the object.
• The vectors used for approaching and leaving the
grasping position.
Additionally, it is chosen to include the following pa-
rameters related to safety and robustness:
• The velocity of the robot.
• A via position for the robot, to help the robot
avoid obstacles in the scene when approaching the
object.
• The height of the gripper when grasping the ob-
ject.
• The approximate diameter of the object to pick.
This can be used to verify that the robot has
grabbed the correct object.
The velocity of the robot can be provided most
precisely by the user in the offline specification. The
remaining parameters are provided through kines-
thetic teaching; that is, by the human user manually
moving the robot around. The sequence is illustrated
in Figure 5.
UsingRobotSkillsforFlexibleReprogrammingofPickOperationsinIndustrialScenarios
681
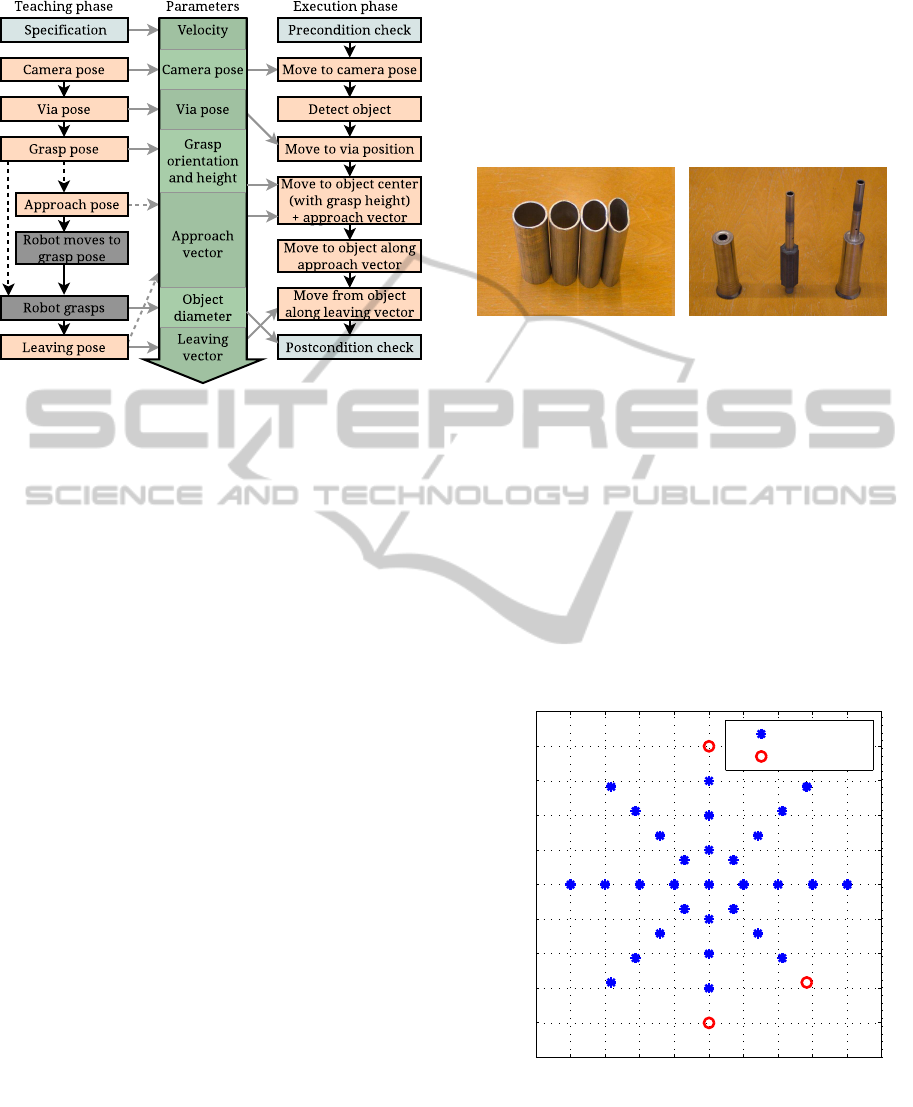
Figure 5: Teaching and execution phase of the pick skill.
In the offline specification, the velocity of the robot is spec-
ified. It is also specified whether the same approach and
leaving vector will be used. If that is the case, the “ap-
proach pose” is skipped during online teaching. All orange
blocks in the teaching phase is input by the user through
kinesthetic teaching.
During teaching of the camera pose the depth im-
age from the camera is shown to the user. This al-
lows him/her to precisely position the camera, so that
the entire desired tabletop is in view. The pre- and
postcondition checks verify that the gripper is initially
empty and ends up holding an object of the approxi-
mate correct size (diameter). The continuous evalua-
tion (see Figure 1) makes sure that the skill execution
proceeds as planned, including that valid object(s) are
detected.
One important feature to note for any skill is that
the ending state must be the same for the teaching and
execution phases. The same applies for the require-
ments for the starting state. This makes it possible
to perform continuous teaching of several specified
skills in a row. Since a successful execution of this
pick skill will result in the gripper holding an object,
the teaching phase of the pick skill is ordered to en-
sure, that the gripper also here ends up holding an ob-
ject. This allows the user to continue teaching a skill
that expects the gripper to hold an object - such as a
place skill.
4 EXPERIMENTAL RESULTS
The pick skill was tested in a number of ways which is
described in the following. First the robustness of the
skill was tested with regards to variations in position
and shape compared to the shape used for teaching.
Then the skill is tested on industrial parts from a pump
production line. Finally, the teaching part of the skill
was tested on non-expert users. The objects used for
the tests are shown in Figure 6. Where nothing else is
specified, the perfect cylinder in Figure 6(a) was used.
(a) Cylindrical and deform objects. (b) Pump parts from an industrial
production line.
Figure 6: Objects used for pick tests.
4.1 Variation in Position
During the teaching phase the object was placed in
the middle of the tabletop shown in Figure 2, and the
camera position was taught so that the object was in
the center of the image. In a realistic scenario, the
position of the object cannot be expected to always
be the same during execution. To test the ability of
the skill to handle this, the execution was executed 33
times. Each time, the object was placed between 0
and 20 cm from the teaching position. The results are
shown in Figure 7.
−20 −10 0 10 20
−25
−20
−15
−10
−5
0
5
10
15
20
25
Relative distance from camera [cm]
Relative transverse distance [cm]
Successes
Failures
Figure 7: Results for pick with variation in position rela-
tive to position used during teaching. The figure shows the
tabletop from above, and the camera position was to the left.
The pick operation succeeded for all positions with varia-
tions up to 15 cm. For errors of 20 cm, the pick operation
failed in 3 of 8 cases.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
682

Of the 33 executions, the robot succeeded in pick-
ing up the object 30 times and failed 3 times. This
corresponds to a success rate of 91%. Notably, all ex-
ecutions with a position deviation of 15 cm and below
succeeded, while all errors occurred at a deviation of
20 cm. Visual inspection showed that the two errors
at (0,-20) and (0,20) were caused by the object being
very close to the border of the plane (see Figure 7).
This caused the object detector to disregard the point
clusters as valid objects. The last error was caused by
an imprecise position estimation.
The time for each pick operation was on average
19.5 seconds. This includes 2.4 seconds on average
for object detection.
4.2 Variation in Shape
The object detector and pick skill were designed for
rotational symmetric objects, as previously described.
It has, however, some robustness to variations in
shape. This robustness is tested in this section using
the increasingly deformed cylinders shown in Figure
6(a).
The pick skill was first taught using the perfect
cylinder shown to the left in Figure 6(a). Then, ex-
ecution was carried out using increasingly deformed
cylinders. It was attempted to pick each of the cylin-
ders three times: Once seen from the wide side, once
seen from the narrow side, and once seen in between
(skewed).
In Figure 8 the most deformed cylinder is seen
from the three different angles. The object detec-
tor has in all cases attempted to fit a cylinder model
around the detected point cloud. For the wide and the
skewed view, the model is fitted correctly. For the nar-
row view in Figure 8(b) the object detector has failed
to classify all points from the cylinder together. In re-
ality, both the green points inside the cylinder model
as well as the white points behind the cylinder model
come from the object. However, only the green points
were used. The reason is, that the depth sensor is poor
at detecting points on the top border of the physical
cylinder as well as inside its narrow hole. Therefore,
a gap arises in the point cloud between the front and
back sides of the cylinder. Unfortunately, the gap is
too large to allow it to be bridged by the clustering
algorithm of the object detector. The effect is that the
position of the object is estimated imprecisely.
Table 1 summarizes the tests of the deformed
cylinders. The pick operation succeeded in all sit-
uations; even for the erroneously fitted narrow view
orientation; in the sense, that the gripper held the ob-
ject when execution had finished. In two situations
the position of the object in the gripper was a bit off.
(a) Wide. (b) Narrow. (c) Skewed.
Figure 8: Rotations of the most deformed cylinder from
Figure 6(a). For the wide and skewed orientations, a con-
taining cylinder is fitted successfully. For the narrow ori-
entation, the containing cylinder is only fitted to the frontal
part of the physical cylinder.
The first of these situations, cylinder 4 seen from nar-
row side, is the one illustrated in Figure 8(b), and the
reason is the imprecise position estimate. The second
is the one illustrated in Figure 8(a). Here, the position
estimate is relatively accurate. However, the position
where the gripper grasps the object was taught, so that
the object here was skewed in relation to the gripper.
When it was grasped, it “slipped” into place in the
gripper.
Table 1: Test results for picking the deformed cylinders
from Figure 6(a). Only one result is given for cylinder 1,
since its shape does not change with orientation. It was
possible to grasp all cylinders with all tested orientations.
In the situations marked as (+), the object was grasped, but
its position in the gripper was not as expected.
No.
Diameter Seen from
Wide Narrow Narrow Wide Skewed
1 4.9 cm 4.9 cm +
2
5.4 cm 4.4 cm + + +
3
5.9 cm 3.8 cm + + +
4
6.9 cm 3.1 cm (+) (+) +
4.3 Application Specific Tests
The pick skill presented here was designed to function
in industrial scenarios with industrial, rotational sym-
metric objects. Therefore it was tested on the indus-
trial objects shown in Figure 6. All three objects are
from a pump manufacturing line at the Danish pump
manufacturer Grundfos A/S. From left, the objects are
respectively a rotor cap, a rotor core, and an assem-
bled rotor.
Obviously, the optimal place to grasp these ob-
jects is not the same. Therefore the pick skill was
taught/parameterized specifically for each of the ob-
jects. Using these, the robot was able to successfully
UsingRobotSkillsforFlexibleReprogrammingofPickOperationsinIndustrialScenarios
683

pick each of the objects three times in three attempts.
For the teaching phase of the skill, a preliminary
test was carried out to verify that it is possible for hu-
mans to learn to use the skill fast. Two users with no
previous knowledge about the pick skill were asked
to teach the skill after receiving only a short intro-
duction to the skill (∼5 min). The users succeeded
to teach the skill in the first attempt, and the teaching
were in all cases completed in less than 4 minutes.
The parameterized pick skills could afterwards be ex-
ecuted. In one case the parameterized pick skill only
functioned in a very limited area, because the robot
otherwise was asked to move outside its limits after
grasping the object. This was, however, easily visible
and could if desired be corrected by re-teaching the
skill.
5 CONCLUSIONS
In this paper, our interpretation of a flexible, robotic
skill has been presented. We see a skill as an object
centered ability, which encapsulates advanced func-
tionality in a way that allows a non-expert user to eas-
ily program the robot to perform a new task. In this
framework, a pick skill has been developed. The pur-
pose of the skill is to make it possible for a robot to
pick up rotational symmetric objects by using a depth
sensor for detection. The skill features both a teach-
ing and an execution phase. In the teaching phase,
the user parameterizes the skill, mainly though kines-
thetic teaching. In the execution phase, the taught pa-
rameters are used to pick up objects.
The skill uses an object detector which is specifi-
cally designed to detect the position of rotational sym-
metric objects, which it does sufficiently accurate to
pick up the objects. Also, experiments have shown
that the skill has robustness to deviations in position
and shape. With regards to position, our robot was
able to pick up 25 of 25 objects placed up to 15 cm of
the location used for teaching the skill. At a distance
of 20 cm it failed for 3 of 8 objects, mainly because
the objects were very close to the border of the table.
With regards to variation in shape, it was possible to
pick up objects with different shapes, including a de-
formed cylinder with a diameter of more than double
on one side compared to the other. Moreover, it was
possible to pick up rotational symmetric objects from
a real production line at Grundfos A/S.
Finally, the teaching phase of the skill was tested
on users with no experience with the skill. With min-
imal introduction, the users were able to complete the
teaching phase in less than 4 minutes.
We believe that with further development of func-
tionality within a flexible skill based structure, there
is a potential for robots to perform tasks, which it has
previously not been profitable to automate. This is es-
pecially the case in small companies and in industries
that manufacture products for rapidly changing mar-
kets. A skill-based approach to robot programming
can make it possible for non-expert users to perform
fast reprogramming of the robots to perform required
tasks when it is required, without the need to call in
robot programmers and other experts.
The pick skill presented in this paper is very easy
to use, and it performs well in many scenarios. The
largest restriction is perhaps that it cannot be guar-
antied to perform well with rotational asymmetric ob-
jects. The future research plan therefore includes in-
vestigation of how a generalization can best be in-
tegrated without complicating the teaching interface
significantly to the user.
ACKNOWLEDGEMENTS
This research was partially funded by the European
Union under the Seventh Framework Programme
project 260026 TAPAS - Robotics-enabled logistics
and assistive services for the transformable factory of
the future.
REFERENCES
Archibald, C. and Petriu, E. (1993). Model for skills-
oriented robot programming (skorp). In Optical En-
gineering and Photonics in Aerospace Sensing, pages
392–402. International Society for Optics and Photon-
ics.
Bøgh, S., Nielsen, O., Pedersen, M., Kr¨uger, V., and Mad-
sen, O. (2012). Does your robot have skills? In
Proceedings of the 43rd International Symposium on
Robotics.
Bjorkelund, A., Edstrom, L., Haage, M., Malec, J., Nils-
son, K., Nugues, P., Robertz, S. G., Storkle, D.,
Blomdell, A., Johansson, R., Linderoth, M., Nilsson,
A., Robertsson, A., Stolt, A., and Bruyninckx, H.
(2011). On the integration of skilled robot motions for
productivity in manufacturing. In Assembly and Man-
ufacturing, IEEE International Symposium on, pages
1–9.
EUROP (2009). Robotics visions to 2020 and beyond -
the strategic research agenda for robotics in europe
(SRA). Technical report, EUROP.
Fikes, R. E. and Nilsson, N. J. (1972). Strips: A new ap-
proach to the application of theorem proving to prob-
lem solving. Artificial intelligence, 2(3):189–208.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
684

cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Gat, E. (1998). On three-layer architectures. In Ko-
rtenkamp, D., Bonnasso, P. R., and Murphy, R., ed-
itors, Artificial Intelligence and Mobile Robots, pages
195–210.
Hvilshøj, M. and Bøgh, S. (2011). ”Little Helper” - an
autonomous industrial mobile manipulator concept.
International Journal of Advanced Robotic Systems,
8(2).
Hvilshøj, M., Bøgh, S., Madsen, O., and Kristiansen, M.
(2009). The mobile robot ”Little Helper”: Concepts,
ideas and working principles. In ETFA, pages 1–4.
Klank, U., Pangercic, D., Rusu, R. B., and Beetz, M.
(2009). Real-time CAD model matching for mobile
manipulation and grasping. In Humanoid Robots,
2009. Humanoids 2009. 9th IEEE-RAS International
Conference on, pages 290–296. IEEE.
Mae, Y., Takahashi, H., Ohara, K., Takubo, T., and Arai,
T. (2011). Component-based robot system design for
grasping tasks. Intelligent Service Robotics, 4(1):91–
98.
UsingRobotSkillsforFlexibleReprogrammingofPickOperationsinIndustrialScenarios
685
