
The Non-Force Interaction Theory for Reflex System
Creation with Application to TV Voice Control
Iurii Teslia
1
, Nataliia Popovych
1
, Valerii Pylypenko
2
and Oleksandr Chornyi
1
1
Kyiv National University of Constuction and Archtecture, Povitroflotsky Avenue, Kyiv, Ukraine
2
International Research and Training Center for Information Technologies and Systems,
National Academy of Sciences of Ukraine, Kyiv, Ukraine
Keywords: Non-Force Interaction, Information Theory, Speech Recognition, Reflex Systems, Self-organization,
Phoneme-by-Phoneme Recognizer.
Abstract: The paper presents the aspects and conclusions of the theory of non-force interaction, discloses the
possibilities of its application to the creation of artificial intelligence systems. The method of calculation of
the reaction on the non-force actions in the sphere of intellectual activity and the universal model of
intellectual reflex system are proposed. On this basis the reflex voice system for control of technical devices
is developed. The article describes the system and results of its usage for controlling the TV. In particular:
the special features of controlling TV’s functionality with voice commands; ignoring the commands, that
are not addressed to the system; learning new commands and desired reactions on user's requests; adjusting
system's behaviour based on user’s speech. The work is aimed to demonstrate the possibilities of the theory
of non-force interaction in the field of study of the mechanisms of the brain, and creation on this basis
artificial systems that approach in terms of its “intelligence” to human intelligence.
1 PROBLEM STATEMENT
Despite of the investment of considerable amount of
work and financial resources into the speech
recognition research there are still no effective
multipurpose tools for understanding of oral speech.
Without solving of this problem it is difficult to talk
about successful automation of all spheres of human
activity. The lack of good solutions, which can be
generally valid in many areas of human activity,
requires searching for a fundamentally new
approach to tackle this task. The theory of non-force
interaction (Teslia, 2005) provides significant help
for finding a solution of this problem. It gives a
formal basis for describing processes of information
exchange in biological systems in general and in the
human brain in particular. This gives a prospect for
the development of new tools for solving many
problems in cybernetics.
1.1 Analysis of the Main Research and
Publications
As examined by Anusuya and Katti (2009, p. 181),
in the area of development of human speech
processing systems a number of interesting methods
and approaches were developed. Global giants of the
software industry – Nuance Communications,
Google, Apple, have implemented the most effective
ones within commercially successful systems.
The most notable achievement in this area is a
joint product of Apple and Nuance – the personal
assistant and a question-and-answer system Siri. The
application uses natural language processing for
answering questions and offering advice.
Developing Siri, Apple used the results of 40 years
of research conducted by “Artificial Intelligence
Centre” and the work of the research groups from
the most famous universities in the world. This study
is, perhaps, the largest artificial intelligence project
to date. Google also offers a very high quality
solution for speech recognition and voice control for
the operating system Android – “Voice Actions”
system. All of these solutions are designed for
mobile platforms.
These companies have created a voice control
system for TV – the company Nuance with its
Dragon TV platform, and Google with Google TV.
Both systems are a supplement to the TV,
implemented as a separate hardware module with the
288
Teslia I., Popovych N., Pylypenko V. and Chornyi O..
The Non-Force Interaction Theory for Reflex System Creation with Application to TV Voice Control.
DOI: 10.5220/0004754702880296
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 288-296
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

corresponding software platform.
1.2 The Unsolved Part of the Problem
All of these systems have one distinguishing feature
in common – they are built using an approach based
on large amounts of training data and the use of
“cloud” computing centres (Jyothi, Johnson, Chelba
and Strope, 2012, p. 41). This requires a permanent
Internet connection to transmit the speech to remote
server for processing. Also, the systems listed above
poorly support international languages, e.g.
Ukrainian and Russian.
1.3 The Purpose of the Article
It is therefore necessary to develop speaker-
independent speech recognition tools, which could
be easily implemented and adapted to different
languages and will not require large computing
resources. This article is focused on presenting a
new technology for creating systems able to respond
to commands expressed in natural language.
2 THE MAIN MATERIAL OF
RESEARCH
As has been shown and proven by biologists,
development of reflexes to various influences lies at
the basis of living beings functioning. Reflex (from
Lat. reflexus – reflected) – is a stereotypical reaction
of the living organism to a stimulus that passes
involving the nervous system (Purves, Williams,
White and Mace, 2004).The assumption of the reflex
nature of the higher centres of the brain was first
developed by scientist-physiologist I. Sechenov.
Before him, physiologists and neurologists did not
dare to raise the question of the possibility of a
physiological analysis of the mental processes – this
was the field of expertise of the psychologists. The
ideas of I. Sechenov were further developed in the
works of I. Pavlov, who discovered the methods of
the objective experimental research of the brain
cortex functions, developed the method of
generation of conditioned reflexes and worked out a
theory of higher nervous activity. A great
contribution to the formation of the theory of
reflexes was made by Charles S. Sherrington (Nobel
Prize in Physiology and Medicine, 1932). He
discovered reflexes coordination, mutual inhibition
and facilitation.
At the level of simple biological objects the
reflexes allow the production of the “right”
response to the state of the environment. At the
human level reflexes are developed not only as a
reaction on the physical influence, but also as a
reaction on the informational impact in the socio-
political sphere, on actions of other people, such as a
teacher at the school, colleagues, etc. Of course,
these reflexes are very complex, ambiguous and
cannot be represented by a simple stimulus–response
model. This model can be rather presented as a “set
of actions”–“the most favourable reaction from the
standpoint of a positive attitude”.
The principles of development of artificial
intelligence systems, which are based on these ideas,
are examined in the theory of non-force interaction
(Teslia, 2013b). The practical output of this theory is
creation of reflex intelligent systems. In particular,
the systems for evaluation of investment proposals
in development; natural language access to
databases; assessment of the impact of harmful
substances in the water resources of the region on
the health of the population; predicting of the
outcomes of sport events. These systems are
described by Teslia in his work (2010). The main
advantages of these systems are the ease of their
creation and the effectiveness of the solutions of
various intellectual tasks.
2.1 Fundamentals of the Theory of
Non-force Interaction
The main idea of the theory of non-force interaction
(NFI) is that any interaction in the Nature first leads
to a change in the material object’s internal
organization (introformation), which in its turn leads
to a change in object’s behavior (motion) (Teslia,
2005). For one-dimensional motion the
introformation is represented by the geometric
model (Fig. 1) with two domains of displacements
(DD).
As measures, which “generate” motion, the
difference and sum of the sizes of DD are taken
(Teslia, 2005). Let's define
as object’s
certainty about the displacement in the direction ,
as object’s awareness about the
displacement in the direction Z.
Using the relativistic mechanics we obtain the
ratio between velocity of drift (), probability of
displacement (), certainty () and awareness () of
the material objects (Teslia, 2013b):
21
∙⇒
2
(1)
TheNon-ForceInteractionTheoryforReflexSystemCreationwithApplicationtoTVVoiceControl
289

1
2
1
(2)
0.5
1
1
2
(3)
1
(4)
0.5
2
(5)
Figure 1: Geometrical interpretation of introformation.
Based on the laws of momentum conservation
the sum of certainties is obtained (Teslia, 2013a):
(6)
where
– the total certainty of objects in a closed
system;
– certainty of material object
.
From the formula of the relativistic addition of
velocities we obtain operation of the addition of
certainties (Teslia, 2005):
∙
∙
⇒
∙
∙
(7)
where
– difference of certainties of the objects
and
;
– certainty of the object
;
–
certainty of the object
;
– awareness of the
object
;
– awareness of the object
.
In the basis of NFI theory lays an assumption
that our brain functioning is based on the same laws.
The given interpretation can be used to create
artificial intelligent systems, whose computing
elements interact with each other under the same
laws as everything interacts in nature!
Consider the example. Let the ball
is moving
with speed
in the direction of (probability of
displacement is
). The other ball
catches it up
and hits it. As a result the ball’s
speed changes
and is
(probability of displacement is
). If it
is being hit by the ball
, which moves with speed
, than ball’s
speed gets the value
(probability of displacement is
). As the punches
are absolutely elastic we can calculate the speed of
the ball
after collision with two balls
and
and obtain the following:
,
(8)
Let’s now consider the non-force impact on the
intellectual system. Let the probability of some
behavior (response) is
. But upon exposure of
the probability of reaction becomes equal
/
. And upon exposure of
the
probability of reaction becomes equal
/
. Then the probability of the reaction of
upon exposure of both
and
:
/
,
/
(9)
And what is the probability of reaction upon
many exposures? Here can be used an algorithm that
comes up from the law of conservation of
momentum. Namely on this basis the reflexes in
living organisms can be generated.
The only criterion of truth is practice. To begin
with a theoretical model has been confirmed in a
series of computer experiments on natural-language
texts (Teslia, 2005). It turned out that the statistical
regularities in the lyrics in Russian correspond to the
given equations. In addition, a several reflex
intelligent systems were developed on this theory
(Teslia, 2013a). Therefore it is tempting to apply
NFI theory for creation reflex system with
application to TV voice control.
2.2 Introformation Method for Solving
the Problem of Speech
Understanding
The question arises whether it is possible to present
the process of voice interaction using the models
that are developed in the theory of non-force
interaction? Traditionally, the speech recognition
systems are based on the principle: “spoken
language” “representation of speech as a set of
linguistic constructions” “speech understanding”.
Based on the theory of non-force interaction the
other model of natural language recognition can be
suggested: “spoken language” “estimation of
non-force (informational) impact on the reaction”
“reaction (understanding or behaviour)” = REFLEX.
In a system that is built upon the NFI theory, the
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
290

recognition process of an informative part of a voice
command could be built in a different way. Let us
assume that any repetitive acoustical phenomenon of
speech (and not just speech) can be associated with
some symbol of a finite alphabet. This
correspondence can be established for quite similar
sounds, in order to reduce the size of the alphabet.
Thus any voice command can be associated with a
phrase consisting of alphabet symbols. This is very
similar to phonetic transcription, but with this
approach we are not limited by the phonemes of a
particular language or by the acoustic phenomena of
speech. Then from the voice command system's
perspective, each symbol from a phrase like that,
especially their combinations – is an “impact” on the
system, and consequentially the appropriate action
of the system would be a “reaction”.
At the learning stage a voice command will be
transformed into a phrase consisting of alphabet
symbols and this phrase will be associated with the
desired system's reaction. Thus, using the proposed
introformation method, it will be possible to
evaluate an impact of symbol's combinations (which
were taken from the phrase) on the selected reaction.
So it is possible to build so-called “base of reflexes”
that will store a magnitude of the impact of some
sequence of symbols on the selection of a specific
system's reaction.
At the recognition stage combinations of
symbols will be used to determine the most likely
reaction. The magnitude of the impact of symbols'
combinations will be taken from the already trained
“base of reflexes”.
This paper proposes to build a voice command
understanding system using the above-stated
principles.
Let’s adapt the proposed by Teslia (2013b)
introformation method for solving the problem of
speech understanding:
1. Formation of the base of reflexes (RB)
showing the statistical information on the pair
“external influence (the utterance)” “the correct
response”.
2. Based on the probabilities of reactions, stored
in the RB, the certainty (Teslia, 2010) of reflex
voice-activated control system (RVCS) is calculated
relatively to these reactions (3). Let's use the
following notations:
– unconditional probability of reaction ;
/
– probability of reaction
providing that there was an action
(some fragment
of human speech):
0.5
1
1
2,
0.5
0.5
1
1
2,
0.5
,
0,
(10)
where
,1, – is the definiteness of reaction
providing that there was an action on the RVCS
(d
– is the definiteness of reaction in the case if
there was no action on the RVCS).
3. The information awareness of RVCS in
relation to these reactions is calculated based on the
known probabilities (2):
1
2
1
,
0,
(11)
where
– awareness of the system about the
reaction , upon the influence
(
– the system’s
awareness regarding the reaction in case of the
absence of action on the system).
4. Using Teslia’s (2013b) method the total
increment of the certainty of the system’s action
based on all the impacts on the system can be
calculated using (6) and (7):
∆
∙
∙
∙
∙
(12)
where ∆ – the total increment of certainty of the
RVCS’s reaction.
5. The calculation of the increment of the
RVCS’s awareness using (4):
∆
∆
1
(13)
where ∆ – the increment of the system’s awareness.
6. The calculation of the new certainty of the
reaction using (7):
∆∙
∙∆
(14)
where
– a new certainty of the reaction .
7. The calculation of a new awareness of the
RVCS using (4):
1
(15)
TheNon-ForceInteractionTheoryforReflexSystemCreationwithApplicationtoTVVoiceControl
291

where
– a new awareness of the RVCS.
8. Estimation of the probability of the reaction
using (5):
/
0.5
2
(16)
where
/
– estimation of the probability
of the reaction under actions
,1,.
The idea of the above method is that it points to
the expected “response” on impact, the adequacy of
which complies with the well-known and
experimentally verified physical laws. By
assumption, the interaction of neurons is based on
the same laws and works in accordance with the
proposed model of non-force interaction. On this
basis it is possible to create artificial introformation
processors that work as neurons do. Not as classic
and well known in cybernetics formal neurons that
are not more similar to natural neurons, as a paper
boat is similar to an ocean vessel. More
sophisticated and complex structures can be
developed on this basis, the structures that respond
to stimulation (actions). All this is embodied in
reflex intelligent systems capable of accumulating
information about the operational environment and
developing an adequate response (reflexes) on
everything in this environment.
The result of the work of the authors' research
team in 2012 is the reflex voice control system,
created using the above method. Let's review its
features.
3 REFLEX VOICE-ACTIVATED
CONTROL SYSTEM FOR
TECHNICAL DEVICES
Reflex voice-activated control system (RVCS) is
designed to work using free-language input
(Pylypenko, 2007) of control commands and content
into the technical device. RVCS increases the
efficiency of the technical device and provides voice
interface, which relieves the operator's hands.
The system consists of two main modules: an
automatic phoneme-by-phoneme recognizer and the
Kernel module.
Phoneme-by-phoneme recognizer (Pylypenko,
2009) is an external binary application. The
phoneme-by-phoneme recognizer carries out
transformation of a voice command into a sequence
of symbols from the finite alphabet.
RVCS implements the introformation method of
reflex generation mentioned above.
Input data for the system is voice command
represented as sound wave. Output data is a control
action on a control object e.g. execution of an
identified command according to the parameters
specified by voice.
While operating, the system generates the
necessary visual and sound informational messages
what gives the possibility to trace the process of
commands identification, responses to them and,
besides this, if necessary to change system’s
behaviour in real time.
Let’s examine main parts of the system and its
operation scheme with application to TV voice
control in Fig. 2.
Figure 2: Structure of RVCS.
The Phoneme-by-Phoneme Recognizer. The
phoneme transcribing algorithm developed by
Pylypenko (2009) builds a phoneme sequence for a
speech signal regardless to the dictionary. The
constructed phoneme generative automata (Fig. 3)
can synthesize all possible continuous speech model
signals for any phoneme sequence. Then the
phoneme-by-phoneme recognition of an unknown
speech signal is applied.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
292

Figure 3: The phoneme generative automata.
First step of the phonemes recognition is a
feature extraction. The speech signal is converted
into a sequence of vector parameters with a fixed 25
ms frame and a frame rate of 10 ms. Then each
parameter is pre-emphasized with filter:
10.97
(17)
Hamming window is applied. A fast Fourier
transform is used to convert time domain frames into
frequency domain spectra. These spectra are
averaged into 26 triangular bins arranged at equal
mel-frequency intervals. 12 dimensional mel-
frequency cepstral coefficients (MFCCs) are
obtained from cosine transformation and lifter. The
log energy is also added as the 13th front-end
parameter.
These 13 front-end parameters are expanded to
39 front-end parameters by appending first and
second order differences of the static coefficients.
Cepstral mean normalization was applied to deal
with the constant channel assumption.
Input to the feature extraction algorithm: a
digitized sound wave.
Output from the feature extraction algorithm: a
feature vector.
Also the phoneme-by-phoneme recognizer uses
an acoustic model. This model uses hidden Markov
Models (HMMs) with 64 mixtures Gaussian
probability density function for acoustic modelling.
Diagonal covariances Gaussians are used. All units
are modelled by 3 left-to-right states with skip
transition. 56 Russian context-free phonemes with
pause unit are chosen. For pattern matching the
Viterbi algorithm is used.
The experimental accuracy of finding phoneme
at the right place for known utterance equals to
approximately 70%.
Input to the recognizer: the digitized sound
wave, which carries the voice command.
Output from the recognizer: a set of phonemes,
which represents the voice command
Example of an input phrase: “Quickly, turn on
channel eighteen for me”.
Example of an output:
kwɪklitə rnɑntʃænə letinfɔ rmi.
The result of acoustic waves recognition is stored
in DB of Phonemes.
RVCS Kernel contains program implementation
of:
The introformation method;
The algorithm of allocation of combinations
of phonemes;
The learning algorithm, which accumulate
statistics.
The Kernel uses DB of reflexes to store
magnitudes of influences of different phonemes’ sets
for choosing a reaction.
Configuration DB includes:
The commands dictionary;
Work protocol;
Setup configuration.
Input to the Kernel:
from the recognizer – the
set of phonemes;
from the DB of reflexes – magnitudes of
influences of each phonemes' combinations
(from the input phrase) for choosing of all
possible reactions where these combinations
were used;
from Configuration DB – a formal description
of an interfacing protocol for interaction with
TV and format of a command, which should
be sent to the TV for execution.
Output from the Kernel: an executable
сommand with parameters.
Example of output: Speaker (Teslia); Command
(Change channel); Channel name (); Channel
number: Tens (10), Units (8).
When a voice command is transformed into “a
command with parameters” it can be executed by an
adapter module, which performs control actions.
Adapter module contains program
implementation of the algorithm of control of the
technical device.
Input to the adapter: the command with
parameters transformed into the formula form.
Result: change of the parameters of the technical
device.
Example: turning on the 18
th
TV channel.
RVCS system is very simple. It implements
reflex behaviour model. It functions in two modes –
training and control. The base of reflexes is formed
in training mode (with a teacher). In control mode
RVCS produces a reaction to the speaker's appeal.
Also, in this mode the self-training is implemented
(if the speaker was not satisfied with system’s
reaction).
Every reflex class is implemented in separate
TheNon-ForceInteractionTheoryforReflexSystemCreationwithApplicationtoTVVoiceControl
293
system component. Classes of reflexes: announcer,
command, channel name, level of number, level of
tens, level of units.
Every system component can be represented as
separate “introformation neuron”. Input data – a
complete input set of phonemes and/or the reaction
of other “introformation neurons”. Output data – the
reaction that is passed to other “introformation
neurons” or to the technical device.
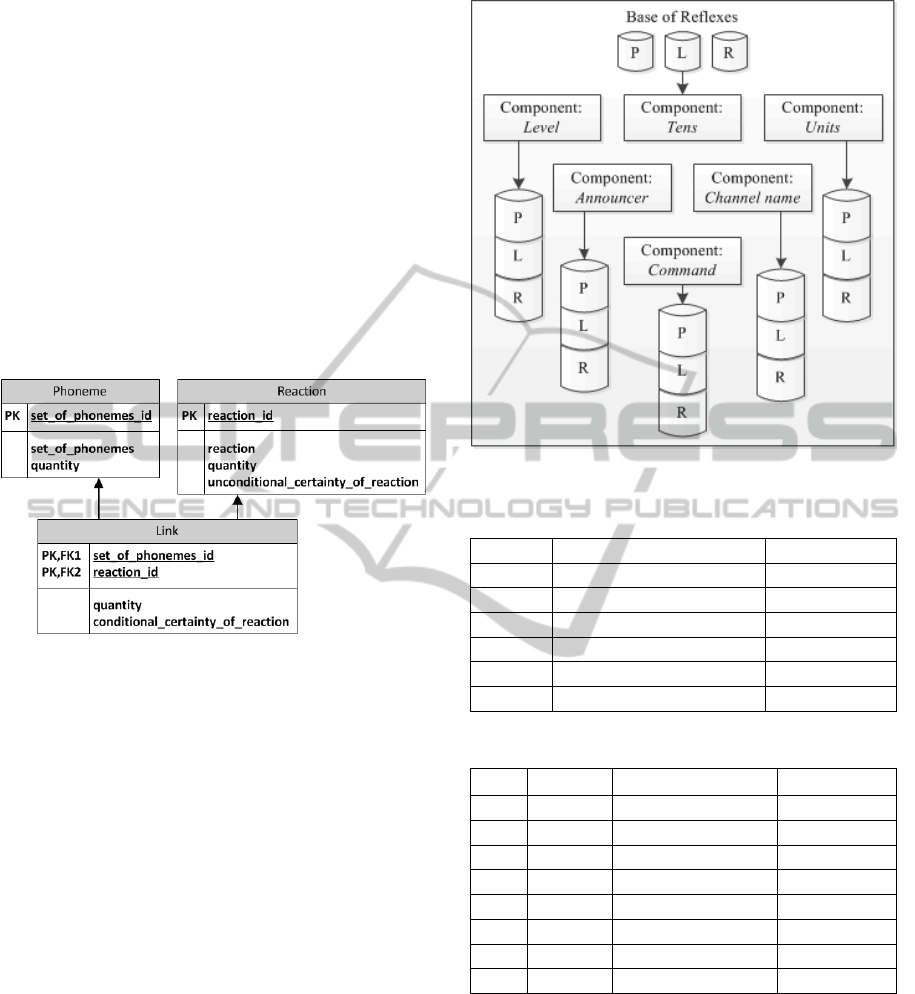
A structure of each component (reflex class) can
be represented as a combination of three tables (Fig.
4). The tables are required for storing combinations
of phonemes (P), which were found in all commands
earlier; all possible reactions of the system (R); and
relationships between combinations of phonemes
and reactions (L).
Figure 4: Structure of a component/reflex.
DB of reflexes can be represented as a
combination of such components (Fig. 5).
Let's consider each table one-by-one. We note
that the tables are filled during the training phase.
1. Table of phonemes (P). This table stores all
combinations of phonemes from 2 to 10 symbols
length, which were found in all voice commands
during the training. Also it stores a number of times
that a combination was encountered in all
commands.
So, during the training, a set of phonemes from
the example (kw ɪklitərnɑ ntʃænəletinfɔ rmi)
will be split on set of combinations consisting of 2
symbols (kw, wɪ, ɪk, kl, li, etc.), 3 symbols
(kwɪ , wɪk, ɪ kl, e tc.), 4 symbols and so on up to
10 symbols. Further, information about absolute
quantity of occurrences of such n-gramms in all
commands will be stored into this table (Table 1).
2. Table of reactions (R). It stores system’s
reactions. It contains: all possible reactions of
RVCS; how many times each reaction was found in
the training sample; certainty of each reaction
without considering what phonemes' combination
has influenced this reaction. Reaction “I don’t
know” ensures the system openness (Table 2).
Figure 5: Structure of the base of reflexes.
Table 1: Phonemes sets table fragment.
P. Id Set of Phonemes Quantity
1 kw 699
2 wɪ 500
3 kwɪ 412
4 wɪ k 388
5 itə r 155
6 t ə r n 123
Table 2: Reaction tables fragment.
R. Id Quantity
Reaction
Certainty
1 0 ** I don’t know ** -63,0178547
2 21 What do you need -13,4087956
3 24 I’m talking to you -12,5749908
4 106 Bless you -6,0310190
5 736 Turn on channel N -2,1567512
6 722 Turn on -7,3254428
7 131 Forward -5,4169182
8 39 Harmful -9,9272670
So at the training stage a user indicates that
combinations of phonemes from the example will
lead to choosing the “Turn on channel N” reaction, a
certainty of this reaction will be recalculated. Also a
counter of occurrences of this reaction (in the entire
training set) will be incremented.
3. Table of relationship (L) links table P and
table R. It contains information about:
Quantity – how many times which reaction
was needed in case of some set of phonemes
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
294

as input data;
Certainty of the reaction conditioned by the
presence of a combination of phonemes,
connected with this set of phonemes (Table 3).
In training mode the mentioned above tables
accumulate information about what input phrases led
to which reactions. In control mode this information
is used for making the appropriate reactions to the
speaker’s appeals using the method, mentioned at
the beginning of the section.
Table 3: Connections table fragment.
P. Id R. Id Quantity Certainty
1 (kw ) 2 (what do you n.?) 1 1,16683067
1 (kw ) 5 (turn on ch.) 2 0,32652037
1 (kw ) 6 (turn on) 2 3,62813851
1 (kw ) 1 (don’t know) 0 25,6847898
2 (wɪ ) 5 (turn on ch.) 1 0,98438145
2 (wɪ ) 1 (don’t know) 0 44,4985958
3 (kw ɪ ) 5 (turn on ch.) 1 0,98438145
3 (kw ɪ ) 1 (don’t know) 0 44,4985958
4 (wɪ k ) 5 (turn on ch.) 1 0,98438145
4 (wɪ k ) 1 (don’t know) 0 44,4985958
The complete set of phonemes comes as input
into every system component. In the reflex voice-
activated control system it is not required:
Create dictionaries;
Execute morphological, syntactical, and
semantic analysis of the text;
Highlight the words and the commands.
The system reacts on audio stream and knows
how to “extract” its informative part (based on the
maximum certainty). The same way as the human
does it.
To test these ideas RVCS was embodied in the
TV voice control system – GUT (Teslia, 2013a).
For describing the procedure of the system's
training it is necessary to emphasize that the system
consists of two separated modules:
The phoneme-by-phoneme recognizer, which
translates a sound wave into a set of
phonemes;
The reflex voice control system, which
recognizes a command based on this set.
Both systems are built on principles of
supervised learning, thus two separate training data
sets were used for their learning.
For the training of the phoneme-by-phoneme
recognizer, namely for the acoustic model
construction, we used a set of 500 sound files with
words along with their phonetic transcriptions. The
phonetic transcription was labeled manually. This
set consisted of the most frequently used words for
TV control.
For the training of the RVCS, namely for the
construction of the reflex’ DB, we used a set of 2000
different commands to TV. This training data set is
comprised of sets of phonemes along with the
corresponding reactions of the system. The already
trained phoneme-by-phoneme recognizer for each
command produced each set of phonemes.
The training samples for the reflex system also
had some specific features:
Spontaneous speech with different levels of
sound and noise was used;
The sentences were pronounced at a different
pace.
The reliability of the developed system was
evaluated on the control sample, which included 600
commands:
200 of simple commands;
200 short sentences (3 to 5 words) that
contained commands;
200 long sentences (at least 8 words) that also
contained commands.
Experimental results:
For simple commands – 98% correctly
recognized actions;
For short sentences – 90%;
For long sentences – 86%;
False alarm (reaction to natural background
voice in the room) – 81 occurrences for 1 hour
of work.
Experimental results show good performance of
the system.
4 CONCLUSIONS AND
PROSPECTS FOR FUTURE
RESEARCH
The paper shows that based on the non-force model
of interaction a fundamentally new artificial
intelligence system can be created in many areas of
human activity. The theory of non-force interaction
reveals the root causes and the laws of interaction
including the laws of interaction of the basic
elements of the human brain – neurons. Also it may
give a different view of the known physical laws.
Thus a probabilistic interpretation of mechanical
motion was proposed by Klapchenko and Teslia
(2011).
Reflex voice-activated control system for
technical devices, presented in this article, is a bright
example of practical application of NFI theory for
TheNon-ForceInteractionTheoryforReflexSystemCreationwithApplicationtoTVVoiceControl
295

building of systems that adequately respond to the
information given in natural language. Reflex
system's main advantages are:
Independence from dictionaries as the system
responds to sounds, not words. Therefore, you can
control it by clapping (one, two, etc.), whistling,
slurred speech (for the deaf people), etc. To prove
this the system has been trained to respond properly
to commands in German without any readjustments
and changes in software.
Economy of resources – its database includes
only combinations of phonemes which are met in the
input stream and estimation of their influence on
system's response.
Ease of teaching. The system will be delivered
trained in one or more languages. Without
reconfiguring of the stenographer the user, if
necessary, can further train the system. For training
user utters a phrase, or portrays a sound (it will be
represented with some set of “phonemes”) and
presses the key combination, which is a response to
this command. Repeating of this step but using a
command in other words will lead to better
memorizing. Generally, we do the same while
teaching a child.
Openness. In the case of conflicting instructions,
the system will choose the one with stronger non-
force impact. In the case of commands with
approximately equal impact the system's reaction
will be “I don't know” (see the first row in Table 2.).
The reaction will be the same in the case of an
entirely new command, as a reaction to this
command has not been developed yet.
REFERENCES
Anusuya, M. A. and Katti, S. K. 2009, ‘Speech
Recognition by Machine: A Review’, International
Journal of Computer Science and Information
Security, vol. 6, no. 3, pp. 181-205.
Jyothi, P., Johnson, L., Chelba, C. and Strope B. 2012,
‘Large-scale discriminative language model reranking
for voice-search’, Proceedings of the NAACL-HLT
2012 Workshop: Will We Ever Really Replace the N-
gram Model? On the Future of Language Modeling
for HLT, Association for Computational Linguistics,
Stroudsburg, pp. 41-49.
Klapchenko, V.I. and Teslia, I. 2011, ‘Probabilistic
interpretation of mechanical motion’, Cornell
University Library, [online] Available at:
arxiv.org/pdf/1102.0441 [Accessed: 20 Sep 2013].
Purves, D., Williams, S., White, L. and Mace, A. 2004,
Neuroscience, Sunderland, Mass: Sinauer.
Pylypenko, V. 2007, ‘Extra Large Vocabulary Continuous
Speech Recognition Algorithm based on Information
Retrieval’, Proceedings of the 8th Annual Conference
of the International Speech Communication
Association, Antwerp, pp. 1461-1464.
Pylypenko, V. 2009, ‘Raspoznavanie klyuchevykh slov v
potoke rechi pri pomoshchi foneticheskogo
stenografa’ [Recognition of keywords in the flow of
speech using phoneme-by-phoneme recognizer],
Rechevye tekhnologii, no. 1, pp. 75-79, Russian.
Teslia, I. 2005, Nesilovoe vzaimodeystvie [Non-force
interaction], Kondor, Kiev (Ukraine), Russian.
Teslia, I. 2010, Vvedenie v informatiku prirody
[Introduction to Informatics of Nature], Maklaut, Kiev
(Ukraine), Russian.
Teslia, I. 2013a, Prezentatsiya real'nogo primeneniya TNV
[Presentation of the actual use of the Non-force
interaction theory], [online] Available at:
http://www.youtube.com/watch?v=m_pYXVndpbc
[Accessed: 20 Sep 2013].
Teslia, I. 2013b, ‘Theory of non-violent interaction’,
International Journal “Information Theories and
Applications”, vol. 20, no. 1, pp. 88-99.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
296
