
Finger Motion Detection for Human Activities Recognition
using Single sEMG Channel
Yang Qian
1
, Ichiro Yamada
1,2
and Shin’ichi Warisawa
1,2
1
School of Engineering, The University of Tokyo, 7-3-1 Hongo, Bunkyo-ku, Tokyo, Japan
2
Graduate School of Frontier Sciences, The University of Tokyo, 5-1-5, Kashiwanoha, Kashiwa, Chiba, Japan
Keywords: sEMG, Single sEMG Channel, Finger Motion Detection, Human Activities Recognition.
Abstract: Today’s aging population has recently become a significant problem, requiring a wearable health monitor-
ing system for the elderly who are living alone. One of the focuses of this monitoring system is human ac-
tivities recognition. We propose a wearable sensing method that is based on muscle’s crosstalk information
that uses only one sEMG channel (a pair of electrodes) to recognize five basic finger motions (thumb flex-
ion, index flexion, middle flexion, ring & little flexion, and rest position) related to daily human activities.
In the first step, an inter-electrode distance (IED) experiment was conducted to define the suitable IED for
crosstalk information collection. In this experiment’s recognition part, a conventional feature extraction
method was adopted. The accuracy of each IED was compared and a suitable IED was defined (50 mm). In
the second step, we propose two new features, the summit foot range (SFR) and summits number (SN), to
represent the different patterns of finger motions’ sEMG signals and adopted the minimal Redundancy
Maximal Relevance (mRMR) feature selection method to improve the accuracy. An accuracy of over 87%
was achieved using the improved recognition methodology compared to 81.5% when using the conventional
one.
1 INTRODUCTION
The number of elderly is rapidly increasing, and
there is an urgent need for a wearable health moni-
toring system that is both safe and comfortable for
the elderly who are living alone. One of the focuses
of this monitoring system is human activities recog-
nition. Most of our daily life activities require us to
use our fingers. The motions of the five fingers of a
human hand play a leading role in detailed static
activities such as typing, reading, writing, and using
a mobile phone. Therefore, if the features of the
motions of our fingers can be accurately extracted, it
would be possible to recognize almost all human
activities from only this five fingers’ activity infor-
mation. In particular, as the flexion motions are
often the start of the finger motions while the exten-
sion motions are those that return back to the normal
state, the five fingers’ flexion motions need to be
focused on first.
Two kinds of sensing approaches have mainly
been proposed in the field of finger motion recogni-
tion, vision sensor based and non-vision sensor
based.
There are several vision sensor based approaches.
Lee et al., 2011, for example, have developed a
finger motion recognition method that detects the
finger’s angle change using a video sensor. Finger
motions like moving, clicking, or pointing can be
recognized by analyzing the contour of the tracked
finger. However, because of the immobility of the
video sensor, it is difficult to use this approach for
outdoor recognition and other kinds of moving activ-
ities recognition.
On the other hand, there are mainly two kinds of
sensors for the non-vision sensor based approach.
One is the gyroscope sensor. For example,
Schaechter et al., 2006, have developed a device to
detect finger motions based on a Micro Electro Me-
chanical Systems (MEMS) gyroscope sensor that is
positioned on the fingers. However, using plenty of
gyroscope chips and cables will decrease the flexi-
bility of the fingers and greatly affect the user’s hand
activities.
The surface electromyography (sEMG) sensor is
becoming an exciting tool for use in finger motion
recognition because it can efficiently and accurately
collect the signal from a finger’s detailed motion.
60
Qian Y., Yamada I. and Warisawa S..
Finger Motion Detection for Human Activities Recognition using Single sEMG Channel.
DOI: 10.5220/0004764700600067
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2014), pages 60-67
ISBN: 978-989-758-010-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

However, previous researches could only achieve an
acceptable level of accuracy for finger motion
recognition using multiple sEMG channels (Ishika-
wa et al., 2010; Tenore et al., 2009; Nagata et al.,
2007). The excessive use of channels not only makes
the subjects uncomfortable but also takes lots of
time for the electrodes’ placement. They used more
than one sEMG channel (a pair of electrodes) be-
cause the accuracy when using only one sEMG
channel was not acceptable. For example, Nagata et
al., 2007, have developed a finger motion recogni-
tion system that is based on 96 pairs of electrodes,
which can recognize 18 kinds of finger motions and
achieve an average accuracy of 95%. However,
when the number of electrodes was reduced to one
pair, the accuracy dropped to 33%. Therefore, how
to increase the portability without affecting the accu-
racy has become a significant research topic.
According to the above statement, we propose a
new finger motion recognition methodology using
one sEMG channel that is wearable and convenient.
This paper is organized as follows. The benefit
of using a muscle’s crosstalk information, which is
the basis of our sensing method, is described in
Section 2. The signal acquisition protocol is de-
scribed in Section 3. The recognition methodology
adopted in the inter-electrode distance (IED) exper-
iment is illustrated in Section 4. In Section 5, the
IED experiment is described and a suitable IED is
defined based on the recognition results. In Section
6, the improved recognition methodology is intro-
duced. The recognition results of the improved
recognition methodology are discussed in Section 7.
Finally, the conclusion and future works are present-
ed in Section 8.
2 MUSCLE’S CROSSTALK
A pair of electrodes is usually placed close to each
other, aiming to collect one specific muscle’s sEMG
signal without much crosstalk from the other mus-
cles. If the IED (inter-electrode distance) becomes
larger, other muscles’ crosstalk information will be
recorded. However, it was previously found that the
crosstalk can produce unique sEMG signals’ pat-
terns that are useful for classification. In addition, a
large IED can make the negative effect of elec-
trodes’ displacement smaller by detecting a signal
that contains multiple muscles’ activity information
(Hudgins et al., 1993).
In our case, as we only use one sEMG channel to
collect the finger motions’ signals, we need to record
the signals of multiple muscles together. So, we
enlarged the IED, and thus, the crosstalk information
of the muscles can be recorded.
3 SIGNAL ACQUISITION
PROTOCOL
Eight intact-limbed subjects (3 females and 5 males,
21-46 years old) with no injury history or nerve
problems on their right forearms participated in our
research.
After their right forearms were wiped with first
an alcohol tissue and then a dry tissue, a pair of
Ag/AgCl adhesive electrodes was attached in the
area around the flexor pollicis longus muscle, the
flexor digitorum superficialis muscle, and the flexor
digitorum profundus muscle, which mainly are asso-
ciated with the fingers’ flexion motions, as shown in
Table 1 (Moore et al., 2010). The center of the two
electrodes is on the midline of the forearm’s palmer
surface, and 0.75 of the distance from the wrist to
the olecranon. This placement ensures that we can
collect clear and stable signals from all three mus-
cles, which can be easily segmented.
Table 1: Forearm muscles and their corresponding fingers’
flexion motions.
Muscle Finger motions
Flexor pollicis longus Flexion of thumb
Flexor digitorum superfi-
cialis
Flexion of index, middle,
ring, and little finger
(proximal interphalangeal
joints)
Flexor digitorum profun-
dus
Flexion of index, middle,
ring, and little finger (dis-
tal interphalangeal joints)
The sEMG signal is collected by sEMG active
dipole (emgPLUX) sensor, which is connected to a
wearable signal acquisition device (BioPLUX
1
re-
search unit) sampling at 1 kHz with a resolution of
12 bits. This device can send the signal (in real-time)
via Bluetooth to the computer. The sEMG signal is
visually inspected on the computer to ensure that it
is stable (MonitorPlux v2.0, PLUX - Engenharia de
Biosensores, Lda.).
The five basic finger motions related to daily ac-
tivities performed by the eight subjects are: thumb
flexion, index flexion, middle flexion, ring & little
flexion, and rest position. As we seldom flex our
ring or little finger separately in daily life, the com-
FingerMotionDetectionforHumanActivitiesRecognitionusingSinglesEMGChannel
61
bination of the ring and little fingers’ flexion was
performed.
The subjects were asked to perform their finger
motions at a relatively fast speed like they usually
would in daily life activities. In order to cut only the
flexion motion’s signal out in the signal segmenta-
tion step, the final position of each flexion motion
was held for a period of approximately 1 s, resulting
in some muscles’ contraction signals. As to avoid
the effect of muscle fatigue, each motion was re-
peated 10 times, and the subjects had to relax for
approximately 1 min before the next motion started.
A total of 400 finger-motion data were collected.
4 CONVENTIONAL
RECOGNITION
METHODOLOGY
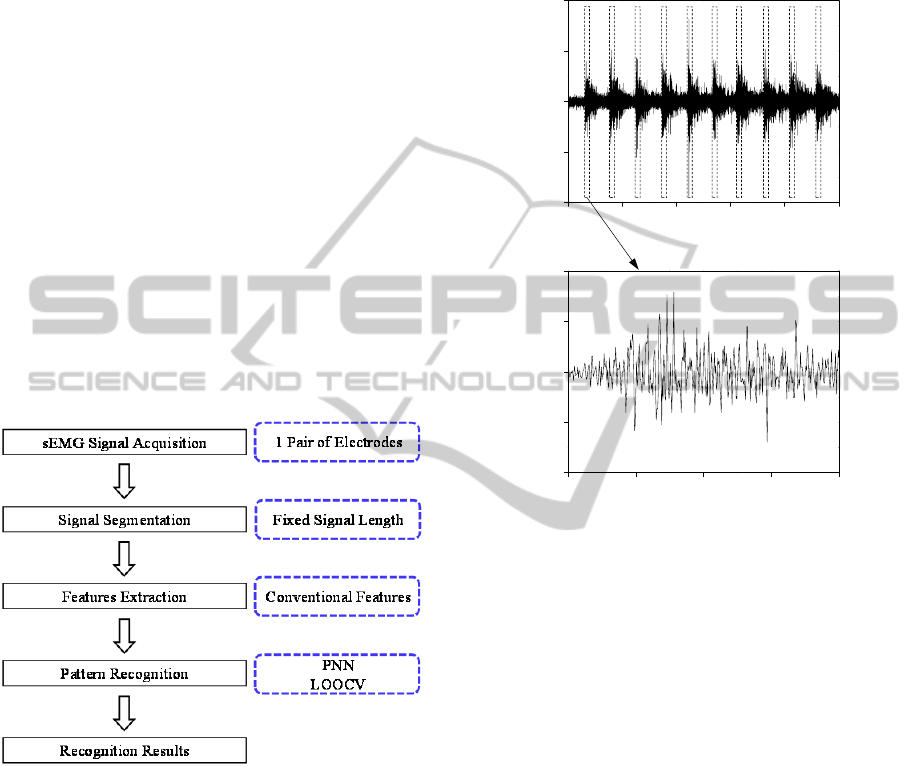
In this section, we illustrate a conventional recogni-
tion methodology adopted in the IED experiment, as
shown in Figure 1.
Figure 1: Conventional recognition methodology of IED
experiment.
4.1 Signal Segmentation Method
In order to cut only the flexion motion’s signal out,
we manually segmented each motion. As shown in
Figure 2, we set the signal length at 400 ms, which
ensured that we cut the flexion motion’s entire sig-
nal out. It is worth noting that the signal segmented
also contained some muscles’ contraction signals as
the subjects performed their flexion motions at dif-
ferent speeds. However, since the flexion motion’s
signal is much larger than the contraction’s signal,
the extracted features mainly belong to the flexion
motion.
4.2 Conventional Feature Extraction
Method
Figure 2: Example of sEMG signals’ segmentation pro-
cess. Each window size in the figure at the top is 400 ms.
The signal segmented in the bottom figure shows that it
also contains the muscles’ contraction signal.
It has previously been demonstrated that Time Do-
main (TD)-Autoregressive (AR) features are useful
and efficient when extracting the features of finger
motions’ sEMG signals (Al-Timemy et al., 2013;
Hargrove et al., 2007; Hudgins et al., 1993). Har-
grove et al., 2007, showed that the TD-AR features
could achieve higher performance than that of other
feature extraction methods such as Fourier transform
and wavelet transform for the detection of hand
motions with sEMG signals.
The TD-AR features we adopted were the AR
model coefficients (order 6), root mean square
(RMS), mean absolute value (MAV), waveform
length (WL), zero crossings (ZC), and slope sign
changes (SSC). It is worth noting that the dead-zone
of the zero crossings and the slope sign changes was
set to 12 mV because the noise became a little larger
after we enlarged the IED.
We adopted the overlapping window method to
extract each feature. The window size was 200 ms
15 2520105
-200
0
200
100
-100
t (s)
sEMG (mV)
0.20.1
-200
0
200
100
-100
t (s)
sEMG (mV)
0.40.3
HEALTHINF2014-InternationalConferenceonHealthInformatics
62

and the interval of the adjacent window was 40 ms.
The average value of each feature for all the win-
dows was calculated, resulting in 11 features for
each sample. Each time domain feature was linearly
normalized to [0,1] before inputting the classifier.
4.3 Classification and Validation
Method
The probabilistic neural network (PNN) was select-
ed as the classifier (Specht et al., 1990). PNN is a
kind of artificial neural network, which has an excel-
lent performance reputation for complex biological
signals like sEMG signals.
As for the validation, we adopted the leave-one-
out-cross-validation (LOOCV) since we have a
relatively small database (400 samples)(Cawley,
2006). In our case, LOOCV involves using a single
observation from the original samples as the valida-
tion data, and the remaining observations as the
training data. The validation was repeated 400 times
and the average accuracy was calculated.
5 INTER-ELECTRODE
DISTANCE EXPERIMENT
In this section, we compare the recognition accuracy
of different IEDs using the conventional recognition
methodology to define a suitable IED.
5.1 Inter-electrode Distance Selection
Figure 3: Placement of pair of electrodes on forearm for
IED experiment. The center of the two electrodes is on the
midline of the forearm’s palmer surface, and at 0.75 of the
distance from the wrist to the olecranon. The IED increas-
es from 30 to 80 mm at an interval of 10 mm.
We selected IEDs of 30, 40, 50, 60, 70, and 80
mm as shown in Figure 3. These IEDs correspond to
the amount of crosstalk information collected rang-
ing from only a few to large amount. In addition, 30
mm means that the two electrodes were placed very
near to each other, which is the conventional place-
ment method.
We separately collected each finger motion’s
sEMG signals from six different IEDs.
5.2 Recognition Results
The accuracy of the six different IEDs using the
conventional recognition methodology are shown in
Figure 4.
Figure 4: Recognition results from six different IEDs.
5.3 Discussion and Conclusion
As shown in Figure 4, the accuracy at 30 mm was
81.5%, which is not very satisfying. However, when
we enlarged the IED to 50 mm, the accuracy in-
creased to the highest level of 86%. So, we defined
50 mm as the suitable IED for collecting a wide
range of crosstalk information without too much
noise, while still maintaining the unique pattern of
each motion’s signal. If the IED is smaller than 50
mm, the crosstalk information of multiple muscles
cannot be fully recorded. And if the IED is larger
than 50 mm, the recorded crosstalk information is
too universal for creating unique signal patterns. In
addition to the crosstalk information, the enlarged
IED is insensitive to the variations in anatomy of the
subjects, which often causes individual differences.
6 IMPROVED RECOGNITION
METHODOLOGY
As the effectiveness of the features and the over-
training of the classifier may significantly affect the
accuracy, apart from defining the suitable IED (50
Olecranon
Wrist
IEDCenter
4030
Inter-electrode Distance (mm)
Accuracy (%)
6050
70
80
76
80
78
86
82
88
84
FingerMotionDetectionforHumanActivitiesRecognitionusingSinglesEMGChannel
63
mm), we also started to think about proposing some
new features and adopting a feature selection meth-
od to improve the level of accuracy.
Our improved recognition methodology with the
50-mm IED mainly contains two new features for
the features extraction and a feature selection meth-
od adopted to decide the optimal feature set.
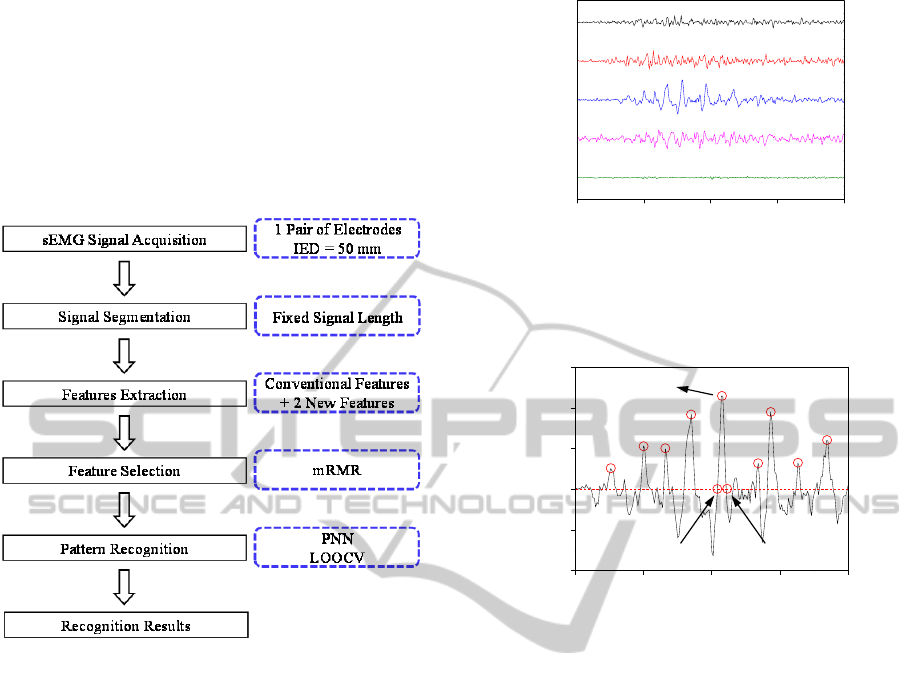
In this section, we introduce the methodology that is
shown in Figure 5.
Figure 5: Improved recognition methodology.
6.1 Newly Proposed Features
In this sub-section, we propose two new features to
represent the different patterns of finger motions’
sEMG signals.
6.1.1 Summit Foot Range (SFR)
We inspected the different motions’ sEMG signals,
and found that the foot ranges of the summits are
different for different motions, as shown in Figures 6
and 7. The foot ranges can be interpreted as the
frequency information of the summits. Therefore, a
feature called the summit foot range is proposed to
represent the frequency information of these sum-
mits.
The SFR in an overlapping window is defined as
the following formula:
SFR = ∑ (Foot2 – Foot1) / N,
(1)
where Foot2 and Foot1 are the two feet of each
summit, and N represents the number of summits
found in an overlapping window.
Figure 6: Example of different patterns of finger flexion
motions’ sEMG signals. Ri&Li represents the ring & little
flexion motion.
Figure 7: Example of summits and two feet of one summit
(Foot1 and Foot2), which is 50– 250 ms of middle flexion
motion’s signal in Figure 6.
A MATLAB function called findpeaks
2
is adopt-
ed to find the summits.
We defined several parameters in this function
so that the patterns of different motions’ sEMG
signals can be clearly extracted.
MINPEAKHEIGHT: In order to avoid extracting
noise’s features, the minimum height of a sum-
mit should be set. The rest position’s signal can
indicate that the amplitude of noise is 12 mV. So,
the MINPEAKHEIGHT was set to 12 mV.
MINPEAKDISTANCE: The minimum distance
between summits was set to 3 ms to avoid mis-
detecting small peaks that occur in the neighbor-
hood of a summit.
We adopted the zero crossing method to find the
feet that are near 0 mV when the foot’s amplitude is
not exactly 0 mV (Hudgins et al., 1993).
6.1.2 Summits Number (SN)
The average number of summits found in all the
overlapping windows was also introduced as a fea-
ture to strengthen the SFR by complementing the
Thumb
Index
Ri&Li
Middle
Rest
0.20.1
t (s)
0.40.3
0.10.05
-200
0
300
100
-100
t
(
s
)
sEMG (mV)
0.20.15
Summit
Foot1 Foot2
200
0.25
HEALTHINF2014-InternationalConferenceonHealthInformatics
64

Figure 8: Example of the rest position’s signal, which
indicates the amplitude of noise. The red and dashed lines
show the MINPEAKHEIGHT of 12 mV.
frequency information of the summits. This feature
is called the summits number.
6.2 Feature Set Optimization by
mRMR
The minimal Redundancy Maximal Relevance
(mRMR) feature selection method can increase the
recognition accuracy by ranking the importance of
the features in regards to both their relevance and
information content (Peng et al., 2005).
We ranked all 13 features by adopting the
mRMR, and compared the accuracy by increasing
the number of input features from a ranking of 1 to
13, as listed in Table 2.
7 DISCUSSION
As listed in Table 2, the accuracy was the highest
when eliminating AR4, which is ranked as the low-
est feature when using the mRMR. So, the optimal
feature set is: SN, AR1, RMS, SFR, WL, AR2, ZC,
MAV, AR6, SSC, AR3, and AR5. The highest accu-
racy we have found thus far is 87.3%, compared to
81.5% for the conventional methodology with the
conventional placement method of IED of 30 mm.
In addition, when we used our improved meth-
odology to recognize the motions’ signals collected
when the IED is 30 mm, the accuracy decreased a
little, as listed in Table 3. This may be because our
newly proposed features are not very suitable for
sEMG signals collected when the IED is 30 mm.
The detailed improvement of each finger mo-
tions’ accuracy is proven by the confusion matrixes
noted in Tables 4 and 5. We determined from the
confusion matrixes that our improved recognition
Table 2: Features’ ranking using mRMR.
Ranking Feature Cumulative accuracy
1 SN 57.8%
2 AR1 71%
3 RMS 75.8%
4 SFR 76%
5 WL 78.3%
6 AR2 84%
7 ZC 84.8%
8 MAV 84.8%
9 AR6 84.8%
10 SSC 87%
11 AR3 86.8%
12 AR5 87.3%
13 AR4 86.8%
Table 3: Comparison of recognition results of convention-
al and improved methodology with IED of 30 and 50 mm.
IED
(mm)
Conventional methodology Improved methodology
30 81.5% 81.3%
50 86% 87.3%
methodology contributed to a universal increase in
almost all the motions’ accuracy. In particular, an
increase of 17.5% was achieved for the flexion of
the middle finger. This shows that our improved
recognition methodology can generally improve the
accuracy of almost all the motions, indicating that
other motions besides the five basic motions can be
accurately recognized as well.
Table 4: Finger motion recognition confusion matrix of
conventional recognition methodology (IED = 30 mm).
Motion Accuracy (%)
Thumb Index Middle Ri&Li Rest
Thumb
71.3
10 1.2 17.5 0
Index 8.8
90
0 1.2 0
Middle 3.7 0
75
21.3 0
Ri&Li 7.5 3.7 17.5
71.3
0
Rest 0 0 0 0
100
The confusion matrix in Table 5 helped us de-
termine that the recognition error mainly comes
from the adjacent fingers. There are basically two
explanations for this phenomenon. One is that the
subjects often could not flex a single finger without
moving the adjacent fingers, causing other finger
motions’ sEMG signals to be collected. The other
explanation is that the crosstalk information of the
adjacent muscles may still be a little universal for
creating the different patterns of the finger motions’
sEMG signals.
0.20.1
-15
-5
10
0
-10
t (s)
sEMG (mV)
0.40.3
5
15
FingerMotionDetectionforHumanActivitiesRecognitionusingSinglesEMGChannel
65

Table 5: Finger motion recognition confusion matrix of
improved recognition methodology (IED = 50 mm).
Motion Accuracy (%)
Thumb Index Middle Ri&Li Rest
Thumb
81.3
13.8 1.2 3.7 0
Index 5
91.3
0 2.5 1.2
Middle 0 0
92.5
7.5 0
Ri&Li 6.2 2.5 20
71.3
0
Rest 0 0 0 0
100
The two new features (SFR and SN) and the
mRMR together contributed to a 1.3% increase in
accuracy (87.3% compared to 86%), which is a
relatively small improvement. However, as noted in
Table 2, the mRMR ranks the SN and SFR in 1st
and 4th
place, respectively, showing they are very
effective features of the sEMG signals for finger
motion recognition. Since we did not normalize the
amplitude of the signals, SFR and SN can have a
robust performance regarding the individual differ-
ences because they are not related to the amplitude
information.
However, although the recognition results by
adopting the mRMR show that only AR4 should be
eliminated, it also indicates that if we do not need to
have the highest level of accuracy, a more compact
feature set can be selected (SN, AR1, RMS, SFR,
WL, and AR2), resulting in an accuracy of 84%.
This result shows us that by adopting the mRMR,
we can determine a relatively suitable feature set
that can significantly reduce the computing time
with only a slight decrease in accuracy.
8 CONCLUSIONS
We proposed a wearable sensing method based on
the muscle’s crosstalk information that uses only one
sEMG channel to recognize five basic finger mo-
tions (thumb flexion, index flexion, middle flexion,
ring & little flexion, and rest position) related to
daily human activities. A suitable inter-electrode
distance was defined (50 mm) from the inter-
electrode distance experiment to improve the accu-
racy. In addition, two new features were proposed
and a feature selection method was adopted, result-
ing in an accuracy of 87.3% compared to 81.5%
when using the conventional methodology with an
IED of 30 mm. Our results show that the improved
recognition methodology is not only effective for
detecting finger motions, but also is insensitive to
individual differences.
The recognition methodology still needs im-
provement. The effectiveness of our methodology in
recognizing other motions besides the five basic
motions should also be reexamined. As for its appli-
cation, we need to adopt the wearable sensing meth-
od and the improved recognition methodology for
recognizing daily human activities like typing, read-
ing, writing, and using a mobile phone.
REFERENCES
Al-Timemy, A., Bugmann, G., Escudero, J., and Outram,
N., 2013. Classification of finger movements for the
dexterous hand prosthesis control with surface elec-
tromyography. IEEE Journal of Biomedical and
Health Informatics, Vol. 17, No. 3, pages 608-618.
Cawley, G. C., 2006. Leave-one-out cross-validation
based model selection criteria for weighted LS-SVMs.
In Proceedings of the International Joint Conference
on Neural Networks (IJCNN’06), pages 1661-1668.
Hargrove, L. J., Englehart, K., and Hudgins, B., 2007. A
comparison of surface and intramuscular myoelectric
signal classification. IEEE Transactions on Biomedi-
cal Engineering, Vol. 54, No. 5, pages 847-853.
Hudgins, B., Parker, P., and Scott, R. N., 1993. A new
strategy for multifunction myoelectric control. IEEE
Transactions on Biomedical Engineering, Vol. 40, No.
1, pages 82-94.
Ishikawa, K., Toda, M., Sakurazawa, S., Akita, J., Kondo,
K., and Nakamura, Y., 2010. Finger motion classifica-
tion using surface-electromyogram signals. In Pro-
ceedings of IEEE/ACIS 9th International Conference
on Computer and Information Science (ICIS), pages
37-42.
Lee, D., and Lee, S., 2011. Vision-based finger action
recognition by angle detection and contour analy-
sis. ETRI Journal, Vol. 33, No. 3, pages 415-422.
Moore, K. L., Arthur F. D., and Anne M. R. A.,
2010. Clinically oriented anatomy. Wolters Kluwer
Health, 6
th
edition, pages 748-750.
Nagata, K., Ando, K., Magatani, K., and Yamada, M.,
2007. Development of the hand motion recognition
system based on surface EMG using suitable meas-
urement channels for pattern recognition. In Proceed-
ings of Engineering in Medicine and Biology Society,
29th Annual International Conference of the IEEE.
IEEE, pages 5214-5217.
Peng, H., Long, F., and Ding, C., 2005. Feature selection
based on mutual information criteria of max-
dependency, max-relevance, and min-redundancy.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 27, No. 8, pages 1226-1238.
Schaechter, J. D., Stokes, C., Connell, B. D., Perdue, K.,
and Bonmassar, G., 2006. Finger motion sensors for
fMRI motor studies. Neuroimage, Vol. 31 No. 4, pages
1549-1559.
Specht, D. F., 1990. Probabilistic neural networks. Neural
Networks, Vol. 3, No. 1, pages 109-118.
Tenore, F. V. G., Ramos, A., Fahmy, A., Acharya, S.,
Etienne-Cummings, and R., Thakor, N. V., 2009. De-
HEALTHINF2014-InternationalConferenceonHealthInformatics
66

coding of individuated finger movements using sur-
face electromyography. IEEE Transactions on Bio-
medical Engineering, Vol. 56, No. 5, pages 1427-1434.
Notes.
1
http://www.bioplux.com/home.
2
http://www.mathworks.co.jp/jp/help/signal/ref/findpeaks.
html?lang=en.
FingerMotionDetectionforHumanActivitiesRecognitionusingSinglesEMGChannel
67
