
Learning with Kernel Random Field and Linear SVM
Haruhisa Takahashi
The University of Electro-Communications, Choufushi Tokyo 182-8585, Japan
Keywords:
Autocorrelation Kernel, MRF, Mean-field, Fisher Score, Deep Learning, SVM.
Abstract:
Deep learning methods, which include feature extraction in the training process, are achieving success in
pattern recognition and machine learning fields but require huge parameter setting, and need the selection
from various methods. On the contrary, Support Vector Machines (SVMs) have been popularly used in these
fields in light of the simple algorithm and solid reasons based on the learning theory. However, it is difficult
to improve recognition performance in SVMs beyond a certain level of capacity, in that higher dimensional
feature space can only assure the linear separability of data as opposed to separation of the data manifolds
themselves. We propose a new framework of kernel machine that generates essentially linearly separable
kernel features. Our method utilizes pretraining process based on a kernel generative model and the mean
field Fisher score with a higher-order autocorrelation kernel. Thus derived features are to be separated by
a liner SVM, which exhibits far better generalization performance than any kernel-based SVMs. We show
the experiments on the face detection using the appearance based approach, and that our method can attain
comparable results with the state-of-the-art face detection methods based on AdaBoost, SURF, and cascade
despite of smaller data size and no preprocessing.
1 INTRODUCTION
A deep architecture is a recent trend in classification
problems to obtain finally flexible linearly separable
features against previous trend depending on rich de-
scriptors such as SIFT, HOG, or SURF (Bengio et.al.
2012). The linear separability of data is a milestone
for a good feature representation, and is realized by
a higher dimensional kernel feature space in SVM as
well as stacked layered representation in neural net-
works.
However, linear separability of training examples
can not necessarily result in a good generalization
if the feature extractor is not fitted in the probabil-
ity distribution of instances. For example, in SVMs,
kernels are required to reflect on the distribution of
instances for better generalization, and yet they are
hard to come by. Fisher kernel (Jaakkola & Haussler
1998) is an exceptional example, in that it is based
on a generative model, but not popularly used due
to its computational cost and speciality. There are
other researches to combine the generative models
with kernels but they take in similar problems (Laf-
ferty Zhu & Liu 2004),(Lafferty McCallum & Pereira
2004),(Roscher 2010).
Although SVM is a general-purpose nonlinear
classifier where its kernel feature space can linearly
separate training data, the data manifolds themselves
are not necessarily separated each other. This is a rea-
son why the deep learning often outperforms SVM in
classification capacity. In this observation we aim at a
feature extractor based on data distribution, which can
give linearly separable data manifolds to be combined
with linear SVM classifier.
We directly use Fisher score of Markov random
field (MRF) as a feature extractor that can give es-
sentially linearly separable representation of the prob-
lem. In order to represent data manifolds effectively
we need to transform MRF into a kernel based repre-
sentation. Fortunately, the cliques in MRF are units of
computing higher order autocorrelation, from which
we can reach a definition of a novel autocorrelation
kernel and the concept of kernel random fields (KRF).
In this context Fisher score can be represented as a
simple form in terms of the autocorrelation kernels
and their differences with the mean value of KRF. Fi-
nally we propose a SVM-like classiier defined by a
linear SVM applied on this feature.
We propose an efficient algorithm to compute the
autocorrelation kernel in the linear order for the in-
put length. KRF is computed by using the variational
mean field that leads the Fisher score to a simple ker-
167
Takahashi H..
Learning with Kernel Random Field and Linear SVM.
DOI: 10.5220/0004792601670174
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 167-174
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

nel difference. We show with computer experiments
on the face discrimination problem that our model
performs better than SVM, and can give comparable
results with specifically tuned face detectors, despite
the smaller training data size.
2 OUTLINE OF THE MODEL
Data manifolds tend to be flexibly linearly separated
by a deep architecture, while indeed data represen-
tation in SVM or multilayer neural networks are lin-
early separated, but data manifolds are not necessar-
ily separated. In order to obtain a linearly separa-
ble representation, the feature extractor should be de-
signed so as to have a potential that takes smaller
values for the object class instances than for the out-
of-class instances. For example, in Auto-Encoder or
Sparse Coding, difference between the input vectors
and the reconstructed vectors is designed to be min-
imum, thus becomes a potential on the data. In a
deep architecture, such feature extractors are stacked,
and enabling to regularize the potential (Erhan et.al.
2010), making the data manifolds be linearly sepa-
rated.
Another idea to obtain a regularized feature poten-
tial comes from the generative models. Fisher kernel
is the one that reflects this idea, and defined by the
inner product of Fisher score, although a problem of
computational efficiency is involved. Given a model
P(x|θ) Fisher score is defined by
λ
θ
(x) =
∂logP(x|θ)
∂θ
(1)
The vector score of Eq.(1) takes a value near 0 for an
input vector x of the class, if the parameter θ is prop-
erly trained as a model of the class. This implies that
Fisher kernel is an over-transformed representation in
the sense that kernel values of x
1
,x
2
near 0 does not
necessarily mean both x
1
and x
2
belong to the class.
In this reason we propose a method to directly utilize
Fisher score with MRF unlike Fisher kernel method
such as (Jaakkola & Haussler 1998).
MRF models objects with auto-correlative units
called cliques, and have been applied for wide range
of signal processing or pattern analysis fields. If we
adopt MRF as a basic generative model for calculat-
ing Fisher score, we must have suffer from combi-
natorially huge number of model parameters corre-
sponding to the number of cliques.
A compact expression of features can be obtained
from the kernel representation of the random field. In
order to take the autocorrelations of cliques into ker-
nels, we will define a feature vector consist of cliques
in section 3, and the kernel is defined by the inner
product of feature vectors. Note that our definition of
autocorrelation kernel does not include the second or
a higher order of single variables. This reduces the
computational complexity of the kernel to linear or-
der.
The higher autocorrelation kernel introduced in
section 3 is able to reflect a difference of higher order
autocorrelations, while the popular Gaussian or poly-
nomial kernel depends only on the difference of input
vector values. A higher order autocorrelation kernel
was examined in (Horikawa 2004), in which direct
inner product of feature vectors of higher order auto-
correlations was used, besides higher order moments
of single variables were used in his setting. Thus it
requires huge computational efforts.
If we use our definition of higher autocorrelation
kernel, we can define Kernel Random Field (KRF) for
n dimensional discrete states x as follwos:
P(x|µ) =
1
Z
exp
−
m
∑
ℓ=1
µ
ℓ
K(ξ
ℓ
,x)
!
(2)
which is equivalent to MRF, where Z is the parti-
tion function, ξ
ℓ
are m training examples, and µ
ℓ
are
the model parameters. For the practical situations,
computation of KRF of eq.(2) is hard for seeking Z.
We apply the mean field approximation to derive the
mean field Fisher score expression in section 5:
λ
ℓ
′
(ξ
ℓ
) = K(ξ
ℓ
′
,ξ
ℓ
) − K(ξ
ℓ
′
, ¯x) (3)
where ¯x,ξ
ℓ
′
,ξ
ℓ
are the mean of the states in the mean
field, ℓ
′
th in-class training instance, and ℓth training
instance, respectively. In fact, on one hand, for the in-
class instances ξ
ℓ
the first and the second terms in the
right hand side of eq.(3) take similar (comparatively
large) values, and the subtraction results in near 0. On
the other hand, if ξ
ℓ
is an outside-the-class instance,
the first term of the right hand side of eq.(3) takes a
small value, and the subtraction results in negatively
large. As the result, the features of eq.(3) becomes lin-
early separable, because the problem is reduced to the
majority voting with the negativelycontinuous values.
We propose a learning scheme using a linear SVM
to discriminate the Fisher score features given in
eq.(3). Then the training process is divided in two
steps; in the first step the mean field KRF is trained for
the class data, and in the second step, the linear SVM
is trained on features of eq.(3) using the all training
data. We will show computer experiments on the face
detection problem in section 6, and show that the pro-
posed scheme works well to get far better results than
SVMs. The results are comparable to a state-of-the-
art face detection system using SURF, cascade, and
AdaBoost (Li & Zhang 2013).
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
168

3 HIGHER AUTOCORRELATION
KERNEL
The autocorrelation kernel previously used one
(Horikawa 2004) was simply computed by an inner
product of feature vectors. The dimension of the fea-
ture vectors is O(n
d
) according to an input vector
size n and a fixed order of autocorrelation d ≪ n. In
our definition of higher autocorrelation kernel, we ex-
cluded the second or a higher moment of single vari-
ables from the feature vectors. In light of this we can
compute the higher autocorrelation kernel in O(n) for
fixed d ≪ n, which is shown below.
Let an input vector be x = (x
1
,...,x
n
)
t
. Then we
define a higher autocorrelation feature vector up to
dth order as
φ(x) = (1;x
1
,...x
n
;x
1
x
2
,x
1
x
3
,...,x
n−1
x
n
;...;
...,x
n−d+1
· · · x
d
)
t
(4)
where the general term representing dth autocorre-
lation is x
i
1
x
i
2
· · · x
i
d
,(i
1
< i
2
,...,< i
d
). Then the
higher autocorrelation kernel is defined by K(x, z) =
φ(x)
t
· φ(z). We will show an efficient computational
algorithm of K(x,z) in the followings.
3.1 Expression with Symmetric
Polynomial
The higher autocorrelation kernel can be represented
using the symmetric polynomial given by
S
0
(x) = 1
S
1
(x) = x
1
+ ... + x
n
S
2
(x) = x
1
x
2
+ x
1
x
3
+ ... + x
n−1
x
n
S
3
(x) = x
1
x
2
x
3
+ x
1
x
2
x
4
+ ... + x
n−2
x
n−1
x
n
· · · · · · · · ·
Let y
i
= x
i
z
i
. Then
K(x,z) =
d
∑
i=0
S
i
(y), y = (y
1
,...,y
n
)
t
(5)
If degree of the kernel should be specified, it would be
written as K
d
(x,z). Notice that the general dth degree
polynomial kernel (< x,z > +c)
d
takes O(n), but the
direct computation of eq.(5) takes O(n
d
),d ≪ n pro-
portional to the number of monomials.
3.2 Computational Algorithm of O(n)
We show the next lemma reducing the computation of
eq.(5) to a recursive formula.
Lemma 1. Let d ≤ n be fixed. Then S
d
is computed
from S
k
,(d/2 ≥ k) in O(n) as
S
d
=
n−[d/2]
+
+1
∑
i=[d/2]
−
+1
ˆ
S
i−1
[d/2]
−
S
i
[d/2]
+
where [·]
−
, [·]
+
represent the floor and the ceil inte-
gers, respectively, and
ˆ
S
i
k
=
ˆ
S
i+1
k
− x
i+1
ˆ
S
i
k−1
(i = n− 1,...,k),
ˆ
S
n
k
= S
k
S
i
k
= x
i
n
∑
j=i+1
S
j
k−1
(proof) First we show the computational complexity.
Sum of
ˆ
S
i−1
[d/2]
−
and S
i
[d/2]
+
is O(n). For fixed k, both of
ˆ
S
i
k
and S
i
k
is computed in O(n). The number of recur-
sive iteration to compute these factors is less than or
equal to log
2
d. Thus totally the computational com-
plexity is O(n). In order to show formally the recur-
sive formulae in the lemma, we can use the induction.
However, as it makes too much complicated, we sat-
isfied with exemplifying d = 1,...,4 in the following.
Q.E.D.
Example S
1
: Note that S
i
1
= x
i
, (i = 1, ..., n), thus
S
1
=
∑
n
i=1
S
i
1
. Then
ˆ
S
i
1
becomes the first degree sym-
metric polynomial of x
1
,...,x
i
, and
ˆ
S
i
1
=
ˆ
S
i+1
1
− x
i+1
, (i = n− 1,...,1),
= x
1
+ ... + x
i
Thus
ˆ
S
n
1
= S
1
.
S
2
: S
2
is computed using S
i
1
,
ˆ
S
i
1
as
S
2
=
n
∑
i=2
ˆ
S
i−1
1
S
i
1
Now S
i
2
is the sum of terms containing both x
i
and
x
j
, (i < j) simultaneously in S
2
. Thus
S
i
2
= x
i
n
∑
j=i+1
S
j
1
= x
i
(x
i+1
+ .. + x
n
), (i = 1,...,n− 1),
Then
ˆ
S
i
2
is defined as the second degree symmetric
polynomial of x
1
,...,x
i
, and determined by
ˆ
S
i
2
=
ˆ
S
i+1
2
− x
i+1
ˆ
S
i
1
(i = n− 1,...,2),
ˆ
S
n
2
= S
2
S
3
and S
4
: Since S
3
is sum of the product of S
i
2
(S
i
1
)
and
ˆ
S
i−1
1
(
ˆ
S
i−1
2
) for all i,
S
3
=
n−1
∑
i=2
ˆ
S
i−1
1
S
i
2
=
n−1
∑
i=2
ˆ
S
i
2
S
i+1
1
Now S
i
3
is sum of terms containing both x
i
and x
j
, (i <
j) simultaneously in S
3
. Thus
S
i
3
= x
i
n
∑
j=i+1
S
j
2
LearningwithKernelRandomFieldandLinearSVM
169

0 500 1000 1500 2000
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
vector size
d=4
d=2
Figure 1: Computational time of higher autocorrelation ker-
nels for size n input vectors.
Further,
ˆ
S
i
3
is defined as the third degree symmetric
polynomial of x
1
,...,x
i
, and determined by
ˆ
S
i
3
=
ˆ
S
i+1
3
− x
i+1
ˆ
S
i
2
(i = n− 1,...,3),
ˆ
S
n
3
= S
3
Similarly we can find
S
4
=
n−2
∑
i=2
ˆ
S
i−1
1
S
i
3
=
n
∑
i=4
ˆ
S
i−1
3
S
i
1
=
n−1
∑
i=3
ˆ
S
i−1
2
S
i
2
and
ˆ
S
i
4
=
ˆ
S
i+1
4
− x
i+1
ˆ
S
i
3
(i = n− 1,...,4),
ˆ
S
n
4
= S
4
S
i
4
= x
i
n
∑
j=i+1
S
j
3
In general we need [k/2]
+
th degree S
i
k
,
ˆ
S
i
k
for seeking
kth degree symmetric polynomial.
Figure 1 shows computational time of autocorrela-
tion kernels for vectors of size n, which are randomly
generated. We can confirm O(n) from this experi-
ment. It is important in applying the autocorrelation
kernel that either the input vectors should be normal-
ized with norms or the kernels are normalized as
ˆ
K(x,z) =
K(x,z)
p
K(x,x)K(z,z)
Autocorrelation kernel must be advantageous for
pattern discrimination tasks. We compared the auto-
correlation kernel with the polynomial kernel using
SVM classifier for real data of face detection. We ran-
domly chose 2000 face data and 2000 non-face data
from training data of CMU+MIT dataset (see section
Figure 2: ROC curves of normalized autocorrelation and
polynomial kernels (7th degree) with SVM.
6). We leave out 400 face and non-face data from
them, and remaining 1600 data for each class are used
for training. Figure 2 compares the ROC curves for
7th degree normalized autocorrelation and polyno-
mial kernels. The autocorrelation kernel shows much
better discrimination performance than the polyno-
mial kernel. The discrimination performance of (nor-
malized) polynomial kernel is same or similar for the
degree greater than or equal to 3.
4 MEAN FIELD KRF
In this section we introduce computationally feasible
feature extraction based on MRF.
4.1 Variational Mean Field of KRF
We derive a variational mean field expression of KRF.
Let the logarithmic potential function of KRF of
eq.(2) be
V
µ
(x) = −
m
∑
ℓ=1
µ
ℓ
K(ξ
ℓ
,x), (6)
and let states x
i
take values k ∈ {0, 1, 2,...,r− 1}. Let
Q(x|µ) =
∏
n
i=1
q
x
i
i
be the mean field probability func-
tion, in which q
0
i
= 1−
∑
r−1
k=1
q
k
i
, and r
k
i
= P(x
i
= k|µ)
be the marginal probability function for KRF given by
P(x|µ). Then the following lemma holds.
Lemma 2. Let E
P
{V
µ
(x)} be the mean of V
µ
(x) with
respect to P(x|µ). Then Q(x|µ) satisfies
q
k
i
=
exp
−
∂E
P
{V
µ
(x)}
∂q
k
i
1+
∑
r−1
k
′
=1
exp
−
∂E
P
{V
µ
(x)}
∂q
k
′
i
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
170

(proof) Mean field probability Q is derived minimiz-
ing the following KL divergence
KL(P,Q) =
∑
s
P(x|µ)ln
P(x|µ)
Q
= −
n
∑
i=1
r−1
∑
k=1
r
k
i
lnq
k
i
− E
P
{V
µ
(x)} − lnZ (7)
Taking the partial derivative of the right hand side in
the second equality of eq.(7) w.r.t. q
k
i
, and putting 0,
we can find that r
k
i
= q
k
i
. Placing this relation back
into eq.(7), and taking the partial derivative q.r.t. q
k
i
to
put 0, the resulting equation gives the lemma.
Q.E.D.
Now let the mean of V
µ
(x) on Q(·|µ) be
E
Q
{V
µ
(x)}. We will use an approximation that the
partial derivative of E
P
{V
µ
(x)} w.r.t. q
k
i
is replaced
by the partial derivative of E
Q
{V
µ
(x)} w.r.t. q
k
i
.
4.2 Mean Field Potential
We take advantage of the d linearity of the autocorre-
lation kernels to derive mean field potential of KRF.
Lemma 3. Let the expression ¯· represent the mean by
the marginal probability function
∏
n
i=1
r
x
i
i
. Then
K(ξ
ℓ
,x) = K(ξ
ℓ
, ¯x)
K(ξ
ℓ
,x
(i)
[k]) = K(ξ
ℓ
, ¯x
(i)
[k])
where the following notation is used
z
(i)
[y] = (z
1
,...,z
i−1
,y,z
i+1
,...,z
n
)
t
(proof) From colinearity of the inner product
K(ξ
ℓ
,x) = < φ(ξ
ℓ
),φ(x) >
Taking the mean w.r.t. each entry x
i
1
·· · x
i
k
of the vec-
tor φ(x),
x
i
1
· · · x
i
k
= ¯x
i
1
· · · ¯x
i
k
, (i
1
< ... < i
k
)
and the lemma is proved. Q.E.D.
Lemma 4. For µ = o(µ)
∂r
k
i
∂µ
ℓ
′
= r
k
i
K(ξ
ℓ
′
, ¯x
(i)
[k]) − K(ξ
ℓ
′
, ¯x)
(proof) The marginal probability is given by
r
k
i
=
∑
x
(i)
[k]
P(x|µ) =
∑
x
(i)
[k]
exp(
∑
m
ℓ=1
µ
ℓ
K(ξ
ℓ
,x))
Z
For µ = 0 KRF becomes the independent field from
eq.(2). Thus P(x|µ) →
∏
n
i=1
r
x
i
i
for µ = o(µ). Using
Lemma 3
∂r
k
i
∂µ
ℓ
′
=
∑
x
(i)
[k]
K(ξ
ℓ
′
,x)P(x|µ)
−
∑
x
(i)
[k]
P(x|µ)
∑
x
K(ξ
ℓ
′
,x)P(x|µ)
=
∑
x
(i)
[k]
K(ξ
ℓ
′
,x)P(x|µ) − r
k
i
K(ξ
ℓ
′
,x)
= r
k
i
K(ξ
ℓ
′
, ¯x
(i)
[k]) − K(ξ
ℓ
′
, ¯x)
Q.E.D.
Lemma 5. For µ = o(µ)
∂E
P
{V
µ
(x)}
∂µ
ℓ
o(µ)
=
∂E
r
{V
µ
(x)}
∂µ
ℓ
o(µ)
= −K
d
(ξ
ℓ
, ¯x)
where E
r
is the mean by the marginal
∏
n
i=1
r
x
i
i
.
(proof) Since P(x|µ) →
∏
n
i=1
r
x
i
i
for µ = o(µ), the first
equality holds in the lemma. From Lemma4
∂r
x
i
i
∂µ
ℓ
con-
verges when µ → 0. Thus
∂E
r
{V
µ
(x)}
∂µ
ℓ
= −K
d
(ξ
ℓ
, ¯x)
−
n
∑
i=1
m
∑
ℓ=1
∑
x
µ
ℓ
K
d
(ξ
ℓ
,x)r
x
1
1
...
∂r
x
i
i
∂µ
ℓ
...r
x
n
n
= −K
d
(ξ
ℓ
, ¯x) + o(µ)
Q.E.D.
From Lemma 5, if we take the first term of
Maclaurin expansion w.r.t. µ
E
P
{V
µ
(x)} = −
m
∑
ℓ=1
K(ξ
ℓ
, ¯x)µ
ℓ
(8)
We denote the vector that is constructed by removing
ith entry from a vector z as
z
(i)
= (z
1
,...,z
i−1
,z
i+1
,...,z
n
)
t
Then
∂K
d
(ξ
ℓ
, ¯x)
∂r
k
i
= kξ
i
ℓ
K
d−1
(ξ
(i)
ℓ
, ¯x
(i)
) (9)
where ξ
i
ℓ
is the ith entry of ξ
ℓ
. From Lemma 2, lemma
3, and Lemma 5, we obtain the mean field equation
r
k
j
=
exp
∑
m
ℓ=1
kξ
j
ℓ
K
d−1
(ξ
( j)
ℓ
, ¯x
( j)
)µ
ℓ
1+
∑
r−1
k
′
=1
exp
∑
m
ℓ=1
k
′
ξ
( j)
ℓ
K
d−1
(ξ
( j)
ℓ
, ¯x
( j)
)µ
ℓ
(10)
LearningwithKernelRandomFieldandLinearSVM
171

The iterative method can applied to eq.(10) based on a
numerical analysis of the differential equation that has
an equilibrium as eq.(10). For computing eq.(10), the
evaluation of (d − 1)th degree kernel will be needed,
and when n is large this takes huge computational ef-
forts. However, if we notice that the kernels in eq.(10)
should be evaluated by vectors of z
(i)
type variables,
the essential computational time reduces to comput-
ing one kernel of K
d−1
(ξ
ℓ
, ¯x). The method is shown
in the Appendix.
5 FEATURES WITH KRF
KRF is trained by one class data, and can be applied
as a feature extractor. In this section we derive the
mean field expression of the maximum likelihood es-
timation and Fisher score as a feature extractor.
5.1 Maximum Likelihood Estimation
Given training data {ξ
1
,...,ξ
m
}, we seek the parame-
ter that maximize the empirical log likelihood
L(µ) =
m
∑
ℓ=1
logP(ξ
ℓ
|µ)
If we apply the mean field Q(x|µ) instead of KRF
P(x|µ),
∂L(µ)
∂µ
ℓ
′
=
m
∑
ℓ=1
−
∂V
µ
(ξ
ℓ
)
∂µ
ℓ
′
+
∑
x
∂V
µ
(x)
∂µ
ℓ
′
P(x|µ)
=
m
∑
ℓ=1
K(ξ
ℓ
′
,ξ
ℓ
) −
∑
x
K(ξ
ℓ
′
,x)Q(x|µ)
=
m
∑
ℓ=1
K(ξ
ℓ
′
,ξ
ℓ
) − K(ξ
ℓ
′
, ¯x)
(11)
where ℓ
′
= 1,...,k, k being the number of kernels used
in KRF. As is shown in section 4, eq. (11) holds for a
small µ. We can perform the steepest ascent method
using eq.(11) for the optimum µ.
5.2 Mean Field Fisher Score
We use the mean field KRF as a feature extractor.
Since the log likelihood of properly trained KRF is
maximized, the Fisher (vector) score given by eq.(11)
is small for a class vector ξ
ℓ
, and large for an outside-
the-class vector. Specifically, we choose {ξ
1
,...,ξ
k
}
for k ≤ m as the kernel data, that is, for ℓ
′
= 1,...,k
∂logP
µ
(ξ
ℓ
)
∂µ
ℓ
′
= K(ξ
ℓ
′
,ξ
ℓ
) − K(ξ
ℓ
′
, ¯x) (12)
are the k dimensional feature of each ξ
ℓ
, where ¯x is
the mean of states with Q(x|µ). As was explained in
section 2, this feature is essentially linearly separable.
In general, the number of kernels k in KRF can be
determined so as to let the training data of size m be
mostly linearly separable. In practice this holds even
for not so large k, but as will be shown in section 6,
such a k is not necessarily resulted in the best gen-
eralization even if m training data are mostly linearly
separated. We can use a linear SVM to discriminate
one class from others on features of eq.(12).
6 EXPERIMENTS
Face detection is a practically important, typical and
difficult pattern recognition problem. This problem
has been studied in a quite large number of references
so far, and is appropriate to evaluate the classifica-
tion power. In this section we empirically evaluate
our method using eq.(12) as a feature extractor for
the face discrimination problem. In the face discrim-
ination problem, a dataset of faces and non-faces are
cropped and resampled from original images, so that
the problem is basically equivalent to the face detec-
tion.
The face detection has been intensively studied
since the break-throughof Viola-Jones (Viola & Jones
2004), and improved using such as SURF, AdaBoost,
and Cascade (Li & Zhang 2013). Datasets of face
detection has also been renewed, and it is difficult to
compare the generalization power with previous stud-
ies.
We describe the experimental results on a subset
of CMU+MIT dataset, which is out-of-date now, but
the detector of Viola-Jones was tested on this dataset.
Alvira and Rifkin (Alvira & Rifkin 2001) prepared a
subset of CMU+MIT dataset for the purpose of clas-
sifier evaluation, and conducted experiments of face
discrimination. We utilize their dataset for training
and testing of our classifier.
In their data set each face or non-face image is
cropped to a 19 × 19 window, and each pixel has
256 grayscale values. There are 2429 face and 4548
non-face cropped images for training, and 472 face
and 23573 non-face cropped images for testing. This
dataset was previously available on the CBCL web-
page, but it is unavailable now.
For training the classifier we used 2429 face im-
ages, and equipped three non-face datasets; the first
set consists of the first 2429 non-face images, the sec-
ond set consists of 4215 non-face images, and the
third set is constructed by adding the mirror images
of the first set to the second set resulted in 6644 non-
face images. For testing we used 470 face images out
of 472 images (the first one and the last one is re-
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
172
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
False positive rate
True positive rate
2429
4215
6644
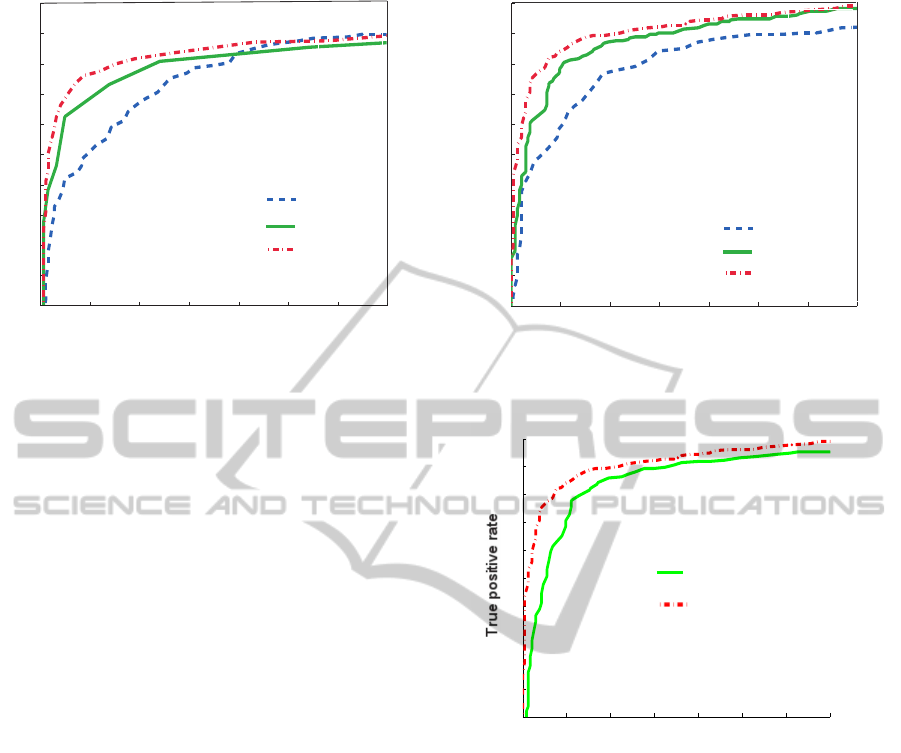
Figure 3: ROC curves for 8 training iteration of KRF corre-
sponding to non-face datasets 2429, 4215, and 6644.
moved), and randomly chosen 470 non-face images
from 23573 images.
Our approach is appearance-based, that is, the
grayscale intensity of image pixels serve as the fea-
ture. Each image is transformed into the projec-
tive space in order to normalize with intensity ratio.
Specifically, each pixel value is divided by the norm
of the image, and multiplied by 19/2, mapping almost
all pixel values into [0,1]. For discrete states of KRF
model, we discretize the pixel values in 9 values from
0 to 1 at intervals of 0.125.
We constructed KRF by 1200 autocorrelation ker-
nels with the first 1200 training face data. The or-
der of autocorrelation is set at d = 4. Then KRF was
trained using 1600 training face data (400 data was
added to the 1200 kernel data) until the absolute value
of eq.(11) became less than 1/100 of the initial values.
We trained a linear SVMon the features of eq.(12)
using 2429 face data and each of the above described
three non-face dataset. LSVM (Mangasarian & Mu-
sicant 2001) is used for this purpose. The soft-margin
parameter of LSVM is set to 0.3∼0.5 so as to discrim-
inate almost all training data.
We show the ROC curves in Figure 3 for 8 iter-
ations and Figure 4 for 10 iterations of KRF train-
ing. In order to investigate the effectiveness of the
feature extractor with KRF (eq.(12) for 10 training
iterations), we compare it with auto-correlation ker-
nel+LSVM in Figure 5. In this figure ROC curves
are shown using 1200 kernels for KRF, and 2429
face + 6644 non-face kernels for auto-correlation ker-
nel+LSVM classifier.
From these results we see that the feature rep-
resentation of KRF is essentially linearly separable.
The recent tendency of face detection is based on the
set of simple visual features called ’integral features’
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
False positive rate
True positive rate
2429
4215
6644
Figure 4: ROC curves for 10 training iteration of KRF cor-
responding to non-face datasets 2429, 4215, and 6644.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
KRF+LSVM
Auto-Correlation kernel
False positive rate
Figure 5: ROC curves for KRF+LSVM classifier with 1200
(face) kernels and auto-correlation kernel + LSVM classi-
fier with 2429 face + 6644 non-face kernels.
proposed in (Viola & Jones 2004), choosing critical
visual features with AdaBoost, and cascade alloca-
tion of discriminators. The cascade allocation aims
at cut-down of detection time with discarding clearly
non-face examples at the early stage of detection.
Unfortunately results with state-of-the-art meth-
ods are not available for comparison as they are based
on a rich training data. However, as in (Li & Zhang
2013) CMU+MIT full test set is used for evaluation of
a state-of-the-art methods, and ROC curves compar-
ing with (Viola & Jones 2004) are presented, we pick
up the coresponding values from the ROC curves to
show comparison in Table 1 only for reference. From
Table 1 we can see that our classifier is comparable
with the state-of-the-art detectors specialized to the
face detection.
LearningwithKernelRandomFieldandLinearSVM
173
Table 1: Recognition/detection rates(%) for false positives
(10, 20%) on CMU+MIT test set.
Systems \ False positives 10 % 20%
KRF(10 iters)+LSVM on the subset
of CMU+MIT test set
94.8 97.2
Viola & Jones 2004 92.1 93.2
SURF cascade, J.Li and Y. Zhang
(picked up from ROC curves of (Li
& Zhang 2013))
(94
1
) –
1 Corresponding point to 92% value of Viola & Jones
7 CONCLUSIONS
In this paper we proposed a new kernel machine
called KRF+LSVM, and showed that its classification
capability out performs SVM through the experme-
nts with empirical evaluation of face discrimination.
We claimed that our feature extraction method can
give essentially linearly separable expression. We ex-
plained it through a property of Fisher score, and the
experimental results could support it. The chief ad-
vantage of KRF+SVM method lies in its simple struc-
ture similar to SVM, in that kernel features are con-
structed with Fisher score. We also proposed efficient
computational framework of KRF and autocorrelation
kernels. In what extent our model works well should
be investigatedfurther, and it is main interest of future
research.
ACKNOWLEDGEMENTS
This work was supported in part by a Grant-in-Aid for
Scientific Research from the Ministry of Education,
Culture, Sports, Science and Technology, Japan (No.
24500165).
REFERENCES
Alvira M. and Rifkin R. 2001, ’An Empirical Compari-
son of SNoW and SVMs for Face Detection’, in MIT
CBCL Memos (1993 - 2004).
Bengio Y., Courville A. and Vincent P. 2012, ’Represen-
tation Learning: A Review and New Perspectives’ ,
arXiv:1206.5538 [cs.LG], Cornell University Library
[Oct 2012].
Erhan D., Bengio Y., Courville A., Manzagol P.A., Vincent
P. and Bengio S., 2010, ’Why Does Unsupervised Pre-
training Help Deep Learning?, Journal of Machine
Learning Research 11, 625-660 .
Mangasarian O.L. and Musicant D.R. 2001, ’Lagrangian
Support Vector Machines’, Journal of Machine Learn-
ing Research 1, 161-177.
Horikawa Yo. 2004, ’Comparison of Support Vector Ma-
chines with Autocorrelation Kernels for Invariant Tex-
ture Classification’, Proceedings of the 17th Omt.
Conf. on Pat. recog. (ICPR’04), 4647-4651.
Jaakkola ,T and Haussler, D. 1998, ’Exploiting Generative
Models in Discriminative Classifiers’ In Advances in
Neural Information Processing Systems 11, pp 487-
493. MIT Press.
Lafferty J. Zhu X., and Liu Y. 2004,’Kernel conditional
random fields: representation and clique selection’,
Proc. of the twenty-first int. conf. on Machine learn-
ing, Canada, Page: 64 .
Lafferty J., McCallum A. and Pereira F. 2004, ’Exponen-
tial Families for Conditional Random Fields’, Condi-
tional Random Fields: ACM Int. Conf. Proc. Series;
Vol. 70, . 20th Conf.on Uncertainty in artificial intel-
ligence, Banff, Canada, 2 - 9.
Li, J. , Zhang Y. 2013, ’Learning SURF Cascade for Fast
and Accurate Object Detection’, CVPR, 3468-3475.
Pham, M. T., Gao, Y. , Hoang,V. D. D., and T. J.Cham, T.
J., 2010, ’Fast Polygonal Integration and Its Applica-
tion in Extending Haar-like Features to Improve Ob-
ject Detection’, Proc. IEEE conf. on Comp. and Pat.
Recog. (CVPR), San Francisco.
Roscher, R., ’Kernel Discriminative Random Fields for land
cover classification’, Pattern Recognition in Remote
Sensing (PRRS), 2010 IAPR Workshop on Date of
Conference, 22-22 Aug.
Viola P. A. and Jones M. J. 2004, ’Robust real-time face
detection’, IJCV, 57(2), 137-154.
APPENDIX
In computing the mean field of eq.(10) we need n
repeated computation of autocorrelation kernel for
n− 1 dimensional variables each removing x
i
for i =
1,...,n. We show a method that manage with one time
computation of degree d− 1 autocorrelation kernel of
n dimensional variable.
For d−1= 1, we can construct the first order sym-
metric polynomial of n− 1 variables from that of n as
S
1
(x
1
,..x
i−1
,x
i+1
,...,x
n
) = S
1
− x
i
= S
1
− S
i
1
Similarly for d − 1 = 2
S
2
(x
1
,..x
i−1
,x
i+1
,...,x
n
) = S
2
− S
i
2
−
ˆ
S
i−1
1
x
i
For d − 1 = 3
S
3
(x
1
,..x
i−1
,x
i+1
,...,x
n
) = S
3
−S
i
3
−x
i
ˆ
S
i−1
2
−S
i−1
1
x
i
ˆ
S
i
1
In general
S
k
(x
1
,..x
i−1
,x
i+1
,...,x
n
) = S
k
−
k
∑
h=1
ˆ
S
i−1
k−h
S
i
h
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
174
