
Delay-based Congestion Control Mechanism for Video Services
Mechanism including Backward Loading and Real-time Modes
Juha Vihervaara and Pekka Loula
Pori Campus, Tampere University of Technology, Pohjoisranta 11, 28100 Pori, Finland
Keywords: Delay-based Congestion Control, Video-on-demand Service.
Abstract: Currently the congestion control of the Internet is implemented through overprovisioning and TCP protocol.
Unfortunately, TCP is not completely suitable for the use of video services. However, recent studies have
shown that these video services represent over half of Internet traffic, with a growing trend. There are also
arguments against massive overprovisioning. Due to these factors, there is a need to equip video services
with proper congestion control. Unfortunately, most of the congestion control mechanisms developed for
the use of video services can only offer low priority services or TCP-friendly real-time services. This paper
provides a study in which a new delay-based congestion control mechanism is presented. This mechanism
can offer congestion control services for both of these service types.
1 INTRODUCTION
Network operators have relied on overprovisioning
and TCP congestion control in order to avoid
congestion in their networks and to provide an
acceptable service level for their customers. Up to
the present time this has been reasonable because
most of the traffic has been TCP-based. However,
video-based services have become a common source
of network traffic (Cisco, 2012). As is well known,
video-based services have often used the UDP
protocol to implement their transport services.
Therefore, these video services operate without any
kind of congestion control support.
Broadly speaking, based on these changes in
Internet traffic types, there are two possibilities for
implementing congestion control in the future. First,
significant overprovisioning can be used to ensure
the proper function of networks. However,
nowadays there are some arguments against massive
overprovisioning. For example, massive
overprovisioning with unnecessary high power
consumption is against green Internet ideology
(Gupta, 2003). (Huang, 2005) says that the values of
the overprovisioning factor of about 5 or even higher
are not uncommon in large IP backbones. Self-
similar traffic (Wornell, 1996) also sets challenges
for overprovisioning. The studies have shown that
variable-bit-rate video, which is transmitted over the
Internet, is often self-similar (Rikli, 2011).
The second possibility is to use slight
overprovisioning and also equip video-based traffic
with congestion control. The current solution, where
we use congestion control only with TCP traffic,
will not be reasonable in the future because TCP
traffic will then no longer play the major role (Cisco,
2012). It could be said that TCP and UDP traffic will
take on the opposite roles to former years.
There are two different kinds of transfer modes
needed among video services. First, there is a need
for a backward loading mode where the delay and
bandwidth demands are moderate. For example, the
whole video can be loaded to the user equipment
before it is watched. Also, proxy servers can be used
so that videos can reside near customers. In this
case, the service provider can load for example films
to proxy servers by using the backward loading
mode. Secondly, there is also a need for a real-time
mode where the delay and bandwidth demands are
important. The user may want to watch a live
broadcast. The backward loading mode has to work
like a low-priority service where the bandwidth is
given away to other connections when the load level
of the network is high enough. In contrast, the real-
time mode always wants its fair share of the
bandwidth.
There are many congestion control mechanisms
which are suitable for either low priority service or
real-time service. But there has been little research
work into developing an integrated mechanism
127
Vihervaara J. and Loula P..
Delay-based Congestion Control Mechanism for Video Services - Mechanism including Backward Loading and Real-time Modes.
DOI: 10.5220/0004794501270134
In Proceedings of the 10th International Conference on Web Information Systems and Technologies (WEBIST-2014), pages 127-134
ISBN: 978-989-758-023-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

suitable for both cases. The aim of this paper is to
study one such kind of integrated congestion control
mechanism. In this case, the term integrated means
that these two mechanisms are as convergent as
possible.
The sending rate can be adjusted based on the
packet losses or delays. Both indicators are utilized
with the mechanism of this study, but it can be said
that the algorithm is more delay-based than loss-
based. The reason for emphasizing the more delay-
based approach in this study is that it generates a
suitable platform for implementing the background
loading mode. In this paper, we try to find out if the
delay-based approach is suitable for this kind of
congestion control mechanism with the help of
simulations.
2 RELATED WORK
There are many different kinds of congestion control
algorithms which can be used by video services.
Some delay-based algorithms and some algorithms
for multimedia streaming are presented below. All
of them are suitable for a low priority or real-time
service. However, none of them are suitable for both
service types.
2.1 Delay-based Congestion Control
DUAL (Wang, 1992) is one of the first algorithms in
this area. In this algorithm, the optimal queue length
is defined and then a corresponding delay in that
queue length is used as a congestion signal.
TCP Vegas (Brakmo, 1994) is perhaps the most
known delay-based congestion control mechanism.
It calculates the amount of data queued on the
routing path. This calculation is made with the help
of RTT samples and sophisticated calculations. If
the queue size is inside the wanted thresholds, the
sending rate is not changed. Otherwise, the sending
rate is decreased or increased. TCP Vegas does not
try to be TCP-friendly because it was designed to be
used in place of TCP Reno.
TCP-LP (Kuzmanovic, 2006) offers low priority
services as compared to the normal best effort
service offered by the Internet. The low priority
service is implemented with the help of congestion
control. To achieve a low priority service in the
presence of TCP traffic, it is necessary to detect an
incipient congestion earlier than TCP. TCP-LP
measures one-way packet delays and employs a
simple delay-threshold based method for the early
indication of congestion. TCP-LP decreases its
sending rate after the smoothed one-way delay
exceeds the threshold.
LEDBAT (Shalunov, 2012) also provides low
priority services by using one-way delay
measurements to estimate the amount of queued data
on the routing path. It increases or decreases its
sending rate based on the predetermined target.
Sending rates are increased and decreased more
aggressively if the queuing delays are far from the
target.
CDG (Hayes, 2011) is a delay-gradient based
congestion control algorithm which no longer
requires knowledge of the path-specific minimum
delay thresholds for the congestion notification. In
fact, CDG does not use delay gradients as a main
source of congestion discovery. Instead, delay
gradients are used to assist the normal TCP Reno-
like congestion control to make the right decisions.
Gradients are used to differentiate between
congestion and non-congestion losses.
2.2 Congestion Control for Multimedia
Streaming
Research work has been very active in this area
during the last few decades. There are many
proposals for multimedia streaming. One approach is
to think that without changes TCP is not suitable for
streaming media because it uses retransmissions for
reliable communication with head of the line
blocking. Therefore, the easiest way to implement
congestion control oriented TCP-friendly transport
layer protocol for multimedia streaming is to
emulate the behaviour of TCP but without TCP’s
reliability. RAP (Rejaie, 1998) and TCP-RMP
(Liang, 2002) can be classified as members of this
group. TCP-RMP also does smoothing operations
for its sending rate because big rate fluctuations with
multimedia streaming are undesirable.
The most known proposal for multimedia
streaming is DCCP (Kohler, 2006) and its TCP
Friendly Rate Control version, abbreviated as TFRC
(Floyd, 2008). The main point with DCCP’s
congestion control is that congestion control is not a
part of DCCP itself. Instead, DCCP allows
applications to choose from a set of congestion
control mechanisms. At this moment, the main
mechanism for multimedia streaming is TFRC.
TFRC is designed for applications that need a
smooth rate, and many real-time multimedia
applications are this type. TFRC is an equation-
based congestion control mechanism, which uses
TCP’s throughput equation (Padhye, 1998) to
calculate the allowed sending rate.
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
128
Google Congestion Control for Real-Time
Communication on the World Wide Web (Lundin,
2012) is a new proposal for this area. It uses delay
gradients in a sophisticated way to detect congestion
so that different frame sizes are taken into account.
3 CONGESTION CONTROL
MECHANISM FOR VIDEO
SERVICES
In this section, a new congestion control mechanism
is presented. This new congestion control
mechanism is called Congestion control for VIdeo to
Home Internet Service, or CVIHIS.
3.1 Basic Functions
There are some basic choices for CVIHIS.
Typically, this kind of service is implemented in a
client-server manner because one video server is
serving a great number of clients. Therefore, the
natural choice is that CVIHIS is a receiver-based
mechanism so that all possible calculations are
placed on the receiver side.
The real-time mode wants to get its fair share
from the network bandwidth. This means that this
mode should be TCP-friendly. However, as usual
with this kind of video application, the bandwidth
should be used in a much smoother way than TCP’s
congestion control does. Of course, this new
mechanism should be stable and scalable which are
typical requirements for all congestion control
mechanisms. CVIHIS is an end-to-end mechanism
because the key element for scalability is the end-to-
end argument described in (Saltzer, 1984). The idea
behind this argument is that if you want the
mechanism to have scalability, the complex issues
should be placed at the network endpoints.
The sending rate can be controlled in a rate-
based or window-based manner. A natural choice for
CVIHIS, and traditionally a more commonly used
approach with multimedia streaming, is the rate-
based approach. (Akan, 2004) says that the window-
based approach is not suitable for continuous
multimedia streaming since its ACK-controlled
packet injection method does not maintain smooth
rate variation.
If the network does not support explicit
congestion feedbacks, the sending rate can only be
adjusted based on the packet losses or delays. Both
indicators are utilized by CVIHIS, but it can be said
that the algorithm is more delay-based than loss-
based. The reason to emphasize a more delay-based
approach is that it generates a suitable platform for
implementing the background loading mode. For
example, LEBDAT and TCP-LP offer mechanisms
so that low–priority applications can withdraw from
using bandwidth after the queuing delay exceeds the
predefined target.
CVIHIS uses one-way delays for delay
measurements instead of round-trip times. The main
motivation behind the choice of one-way delay is
that this means the necessary calculations can be
made on the receiver side. However, there is a
drawback with this one-way delay based mode. The
clocks of the end-points have to be synchronized
with some level of accuracy because we are
measuring one-way delays.
3.2 Backward Loading Mode
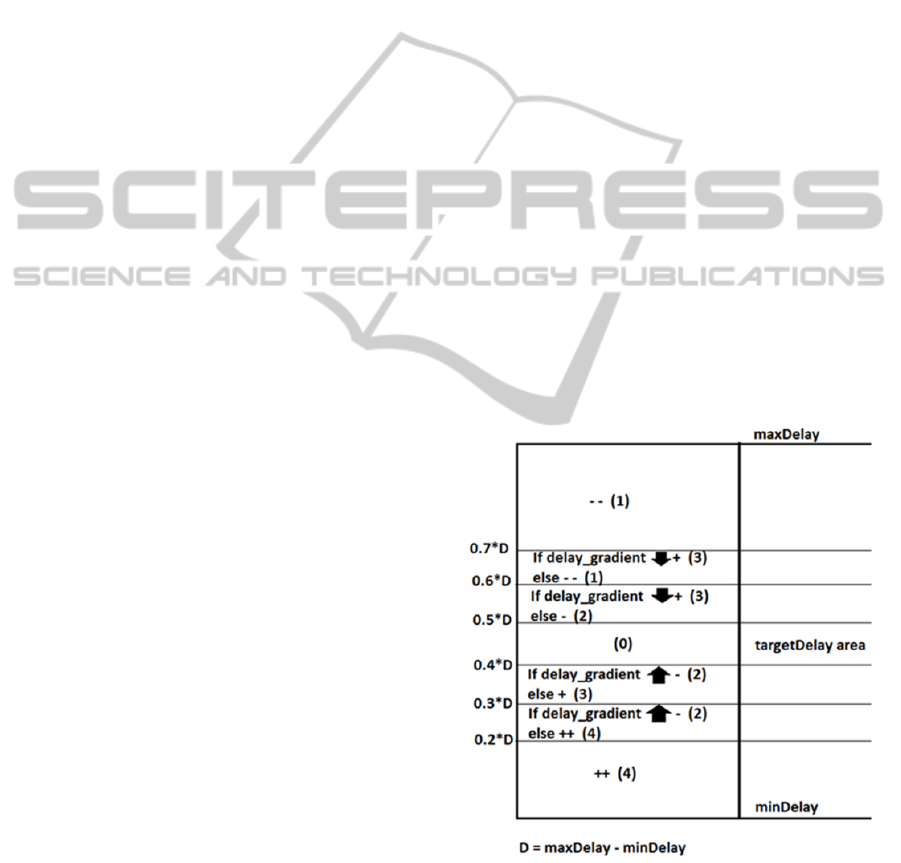
The rate adaptation schema of CVIHIS is presented
in Figure 1. Based on delay measurements, the
minimum and maximum delays are picked up. The
minDelay value presents a situation in which the
queues of the connection path are empty. The
minDelay value only includes propagation delay
components. It could be said that the minDelay
value is the shortest one-way delay value
experienced during the lifetime of the connection.
Figure 1: Rate adaptation schema of CVIHIS.
The maxDelay point is found when a packet drop
occurs. The delay value of the last received packet
before the dropped packet is used for the maxDelay
value. In this study, the maxDelay value is totally
Delay-basedCongestionControlMechanismforVideoServices-MechanismincludingBackwardLoadingandReal-time
Modes
129

updated after each packet drop. However, there can
be different kinds of congestion situations in real
networks, and these situations generate different
kinds of delay values for packet drop situations.
Thus, for example, the Exponentially Weighted
Moving Average (EWMA) could be used in the
calculation of the maximum delay value. The
EWMA process would average different kinds of
congestion situations.
With the help of the minimum and maximum
delay values, the delay space is divided into seven
rate adaptation areas. We could also say that the
queue of the router is divided into several parts. The
centremost delay area is called the targetDelay area.
The basic idea is that CVIHIS tries to keep the
queue level of the router at the level of this target.
Note that this target delay may be over the delay
demand of the application. If applications have delay
and jitter demands, these demands have to be
satisfied by Quality-of-Service mechanisms.
CVIHIS is a pure congestion control mechanism, not
a Quality-of- Service mechanism.
As shown in Figure 1, the target delay area is not
put in the middle of the delay space. Instead, this
area is shifted downwards a little so that queuing
delays can be kept short. The shiftng used in this
case is perhaps too modest for the normal situation.
But if the routers are equipped with active queue
management mechanisms, this shiftng may be
appropriate. The positioning factors for each delay
area are presented on the right side of this figure.
There are black arrows inside some delay areas.
These black arrows represent the direction of the
delay. Thus, delay gradients are also used by
CVIHIS for rate adaptation. With the help of delay
gradients the target delay area can be achieved
without significant oscillation. Using only delay
gradients for rate adaptation is not recommended
because delay gradients are often too sensitive to
second-order delay fluctuations (Wang, 1992).
These delay gradients are obtained by comparing
the delay values of two consecutive packets. If the
arrow is upwards, the delays are increasing and the
delay gradient is positive. This also means that the
queue is filling up. If the arrow is downwards, the
delays are decreasing and the delay gradient is
negative. Therefore, the queue is empting.
As can be seen, we have four delay areas with a
black delay gradient arrow. Inside these four areas,
the rate adaptation command is based on the actual
delay value and the value of the delay gradient. The
delay value assigns a certain delay area. Inside this
delay area, the delay gradient defines the actual rate
adaptation feedback. The two extreme delay areas
do not use delay gradients for rate adaptation
decisions.
This rate adaptation schema tries to achieve two
target values. It tries to drive the queue level to the
level of the target delay area. This is done with the
help of the actual delay values. The adaptation
schema also tries to adapt the sending rate to the
level of the bottleneck capacity. This is done with
the help of the delay gradients. Based on these two
targets, one extra rule can be defined. If there is a
conflict of interests between these two targets, the
sending rate target is favoured.
CVIHIS can adjust its sending rate through five
adjustment steps. Four of these steps are presented in
Figure 1 by ++, +, -, --. There are two different level
steps for both increasing and decreasing the sending
rate. These four adjustment steps are quite moderate
so that some kind of additive increase and additive
decrease behaviour is achieved. The fifth adjustment
step is a multiplicative decrease step which is used
after a packet drop. During one round-trip time only
one multiplicative decrease step is taken. To
simplify matters, we can say that CVIHIS imitates
AIMD behaviour (Chiu, 1989).
As stated above, the aim is for CVIHIS to be a
receiver-based congestion control mechanism.
Therefore all conclusion procedures presented in
Figure 1 are implemented on the receiver side. Only
the rate adaptation command, which is an integer
number, is transmitted to the sender. The values of
the commands are presented inside parentheses in
Figure 1. The sender increases or decreases its
sending rate based on these commands if the
measured delay is outside the target delay area.
3.3 Real-time Mode
The backward loading mode backs off when it
competes with TCP. This means that we must
modify the backward loading code so that it will
behave in a more aggressive way to be suitable for
the real-time mode. We will take an approach in
which we push the minimum delay value upwards in
a continuous manner. This approach means that the
delay areas, which are presented in Figure 1, are also
pushed upwards and therefore will CVIHIS behave
more aggressively.
As a matter of fact, CVIHIS competes harder and
harder during the pushing phase because the delay
areas move higher and higher all the time. This
upwards pushing is only done when the competing
behaviour is really needed. If the last measured
delay value is smaller than the pushed minimum
delay value, the minimum delay value is set to the
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
130
last measured delay value. With this choice, there is
no need to change the code of the sender side. In
addition, only two code lines have to be added to the
code of the receiver side.
This pushing function makes it possible for
CVIHIS to compete against the TCP protocol. But
this pushing function also gives other benefits. It
alleviates the rerouting problem which is a typical
problem for delay-based congestion control
mechanisms. It also helps the clock synchronization
problem.
In fact, the clock offset is not a problem for
CVIHIS. CVIHIS divides the area between the
values of the minDelay and maxDelay into several
delay areas. CVIHIS can do this correctly if the
maxDelay is greater than the minDelay. This means
that these delay values can also be negative due to
the clock offset. Instead of, clock drift can cause
problems. If the delay trend is growing, the
minDelay will become outdated. So, it is desirable
to update the minDelay value from time to time. In
this way, the accumulation of clock drift can be
removed. Due to this clock drift problem, it is also
perhaps clever to equip the backward loading mode
with this pushing function in the future. With the
backward loading mode, a small pushing factor
could be used. The simulation in this study of the
backward loading mode did not include this pushing.
The minimum delay value is pushed upwards by
the pushing factor so that the current value is
multiplied by this factor. Through simulation it was
found that a pushing factor of 1.10 is the value of the
suitable parameter group. This 1.10 is quite a high
value. This high value indicates that CVIHIS must
behave in quite an aggressive manner to be TCP-
friendly. In fact, (Yang, 2001) shows that TCP is a
quick protocol to utilize extra bandwidth.
4 SIMULATION RESULTS
The simulation program used in this work is NS-2
(Fall, 2013). The congestion control mechanism
developed in this work is implemented as a new
transport layer protocol of NS-2. The new network
component objects have been written using C++-
language. These new objects have been added to the
NS-2 environment.
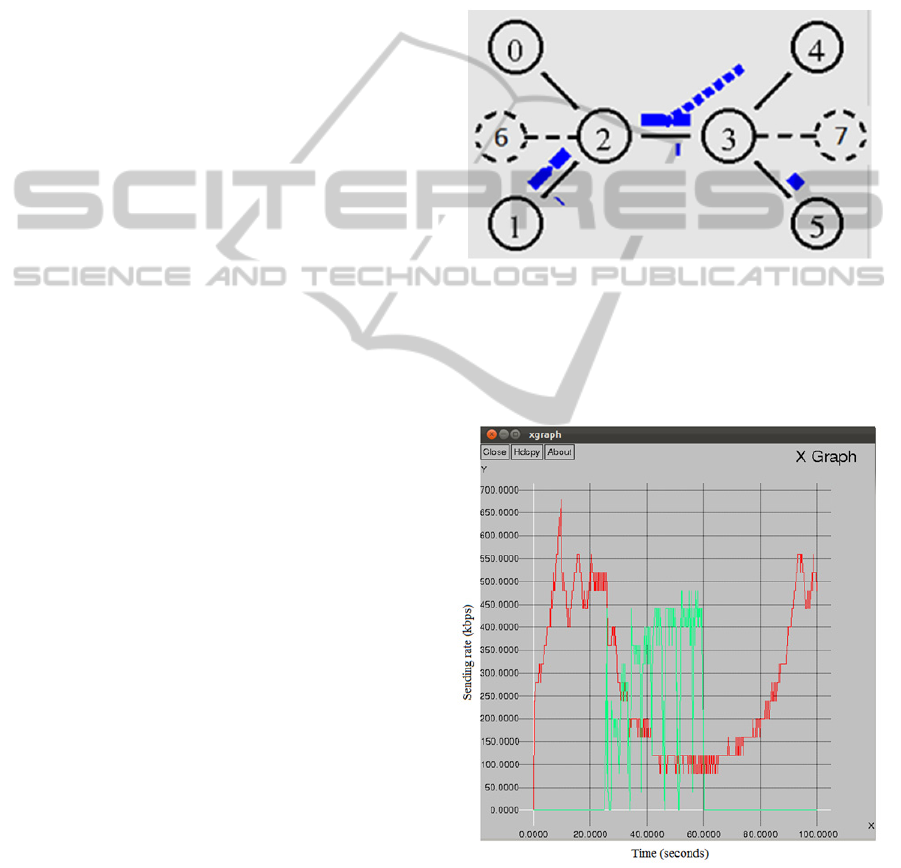
4.1 Test Network
The structure of test network is presented in Figure
2. There are six end nodes and two core nodes.
Nodes 2 and 3 are core nodes. Because we are
dealing with the TCP/IP protocol suite, these core
nodes present IP routers. In node 2, the queue size of
the bottleneck link is 20 packets. Other nodes are
end nodes. For example, CVIHIS’s sender resides on
node 0 and CVIHIS’s receiver on node 4. Some end
nodes are represented by broken lines because these
nodes are present only if three user connections are
needed. In the simulation results, CVIHIS will be
depicted in red. TCP connections will be depicted in
green and blue.
Figure 2: Structure of the test network.
4.2 Backward Loading Mode
Figure 3 presents the results of the simulation in
which the back off behaviour of CVIHIS is tested.
Figure 3: Simulation results of the backward loading.
The CVIHIS connection is started at the beginning
of the simulation. The sending rate of CVIHIS is
expected to settle to the capacity of the bottleneck
link. This initial phase takes about 20 seconds
Delay-basedCongestionControlMechanismforVideoServices-MechanismincludingBackwardLoadingandReal-time
Modes
131
because no special start phase algorithm is used.
After this settling phase, the TCP connection is
started. The TCP connection is stopped after the
CVIHIS back off action. After that it is checked that
CVIHIS increases its sending rate because there is
now free capacity in the network.
As can be seen, there is some oscillation
behaviour at the beginning of the connection. The
first high rate peak is necessary because the CVIHIS
queue level probing does not switch on until after
the first packet drop. The maxDelay value is not
defined before this first drop. The stabilization
happens after 20 seconds. As can be seen, the rate
also varies after this point. However, this rate
variation is generated only by the phase effect of the
analysis tool. In order to calculate the sending rates,
the packets are grouped. This grouping interval is
0.2 seconds, and it is often not compatible with the
packet interval times. As a result, there may be one
packet differences between the groups.
This simulation shows that the backward loading
mode of CVIHIS works as expected and desired.
4.3 Real-time Mode
The TCP-friendliness of CVIHIS is tested in this
section. Tests are made against the TCP Reno
version. In fact, there is more behind this phase
because the correct rate adjusting parameters for
CVIHIS are searched for at the same time. These
parameters can be used for tuning CVIHIS to be
TCP-friendly. This suitable parameter group has also
been used in the simulation case of the backward
loading mode.
This parameter group is presented in Table 1. In
fact, we are adjusting the sending gaps of the
packets. So if we want to decrease the sending rate,
the value of the parameter must be over 1. The four
leftmost columns present values for the delay areas
presented in Figure 1. MD is the multiplicative
decrease factor which is used after packet drops. The
value of the pushing factor used by the real-time
mode is 1.10. Every data packet generates a rate
adjustment command. However, after the
multiplicative decrease step it takes one round-trip
time before the rate adjustment continues.
Table 1: Adjustment parameters of CVIHIS.
++ + -- - MD
0.9976 0.999 1.002 1.001 1.23
In the first simulation case, CVIHIS and TCP
start with the initial rate of 300 kbps. The capacity of
the bottleneck link is 600 kbps. Both connections
start at the same time. The simulation result for this
case is depicted in Figure 4. In this simulation case,
CVIHIS manages very well. It takes almost exactly
its fair share from the capacity of the bottleneck. We
have also made other simulations in which the initial
rates of CVIHIS and TCP have not been equal. In
those cases, CVIHIS managed at an acceptable level
but not as perfectly as in this first case.
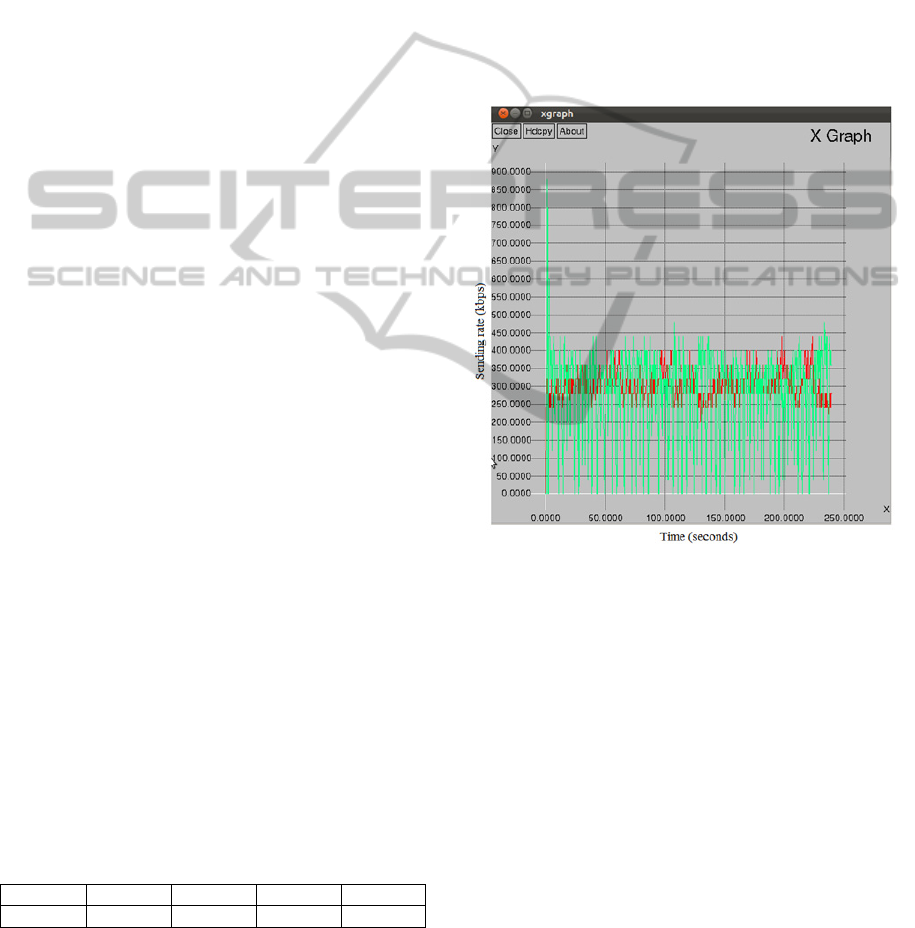
CVIHIS has also been tested against two TCP
connections. The CVIHIS connection and the other
TCP connection are sending all the time. Another
TCP connection is started and stopped during the
simulation. The capacity of the bottleneck link is
still 600 kbps.
Figure 4: Test against one TCP connection.
In this simulation, it is first investigated if
CVIHIS reduces its sending rate after the other TCP
connection is started. It is also examined whether
CVISIS would increase its sending rate after the
other TCP connections is stopped. The simulation
result is presented in Figure 5. In this case, CVIHIS
manages moderately. It can decrease and increase its
rate as required. However, when there are two active
TCP connections, CVIHIS exhibits back-off
behaviour. The sending rate of 100 kbps is
CVIHIS’s minimum rate. This moderate minimum
rate is used because real-time video services need it.
4.4 Rerouting Problem
One simulation has been done to test the rerouting
properties of CVIHIS. The rerouting discovery
ability of CVIHIS is based on the pushing of the
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
132
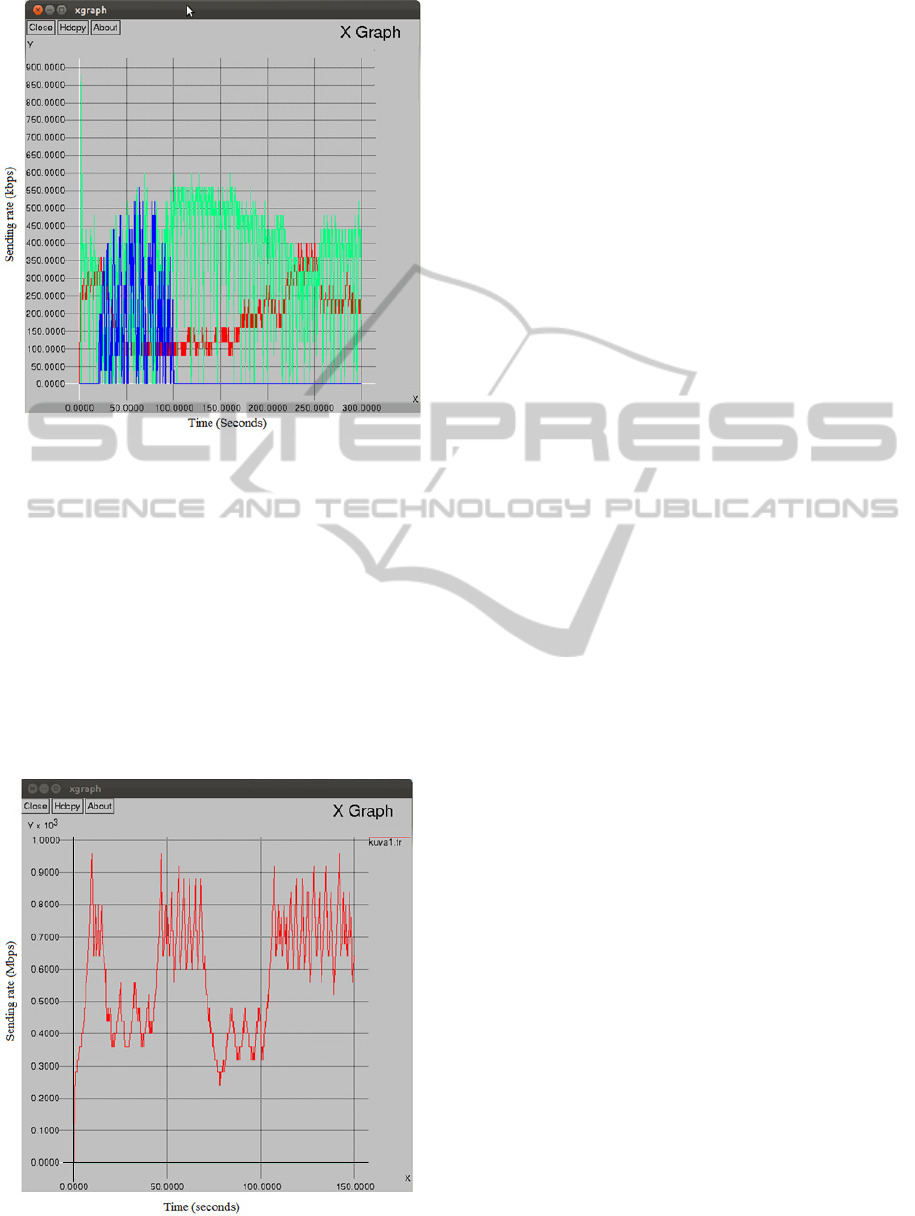
Figure 5: Test against two TCP connections.
minimum delay value and updating of the maximum
delay value.
The network layout has been changed for this
simulation. There are two possible routes between
nodes 2 and 3. There is a direct default route and a
backup route. The default route is switched off
twiceo times during the simulation. The capacity of
the default route is 700 kbps and the capacity of the
backup route is 400 kbps. The simulation result is
presented in Figure 6. As can be seen, CVIHIS can
observe route changes and it can accommodate its
sending rate according to the new route.
Figure 6: Testing rerouting properties of CVIHIS.
5 CONCLUSIONS
With the help of simulation it was found that this
kind of delay-based congestion control approach
could be suitable for video services. CVIHIS
managed in an acceptable way.
However, it was found that CVIHIS behaves in
quite a parameter sensitive way in terms of TCP-
friendliness. Small changes to the values of the
adjusting parameters caused changes to the TCP-
friendliness. This kind of parameter sensitiveness
can be problematic. It can also mean that minor
changes in the network environment generate
problems for TCP-friendliness. Therefore, it is also a
good idea to simulate CVIHIS against other TCP
versions, like TCP New Reno.
On the other hand, these kinds of findings come
as no big surprise. It is a delicate task to make
different kinds of mechanisms work together in a
harmonious way. TCP and CVIHIS are very
different kinds of congestion control mechanisms.
TCP is a loss-based mechanism and CVIHIS is
merely a delay-based mechanism. TCP is a window-
based mechanism and CVIHIS is a rate-based
mechanism. Widmer’s paper (Widmer, 2001)
analyses different kinds of congestion control
mechanisms. This paper shows that rate-based
congestion control mechanisms have some trouble
with TCP-friendliness because TCP uses window-
based rate control. Consequently, extra simulations
are needed to prove the usefulness of this CVIHIS
approach on a large scale.
Some elaboration work is also needed. For
example, due to the pushing operation of the
minimum delay value, the sending rate of the real-
time mode fluctuates. This can be seen in Figure 6.
Therefore, some smoothing function could be added
in future work. For example, some filtering
procedure could be put on the top of the current
algorithm to make a low pass filtering procedure.
Instead of specifying a complete protocol, the
aim of this study was to specify only a congestion
control mechanism that could be used in different
parts of the protocol stack. Only a basic mechanism
was defined and all kinds of special cases were left
outside this presentation. Therefore, all kinds of
special cases, such as the start phase of the
connection, need extra study in the future.
One possible point for future research could be to
test the real-time mode of CVIHIS by using another
kind of congestion control approach. This other
approach could be a loss-based approach so that the
behaviour of TCP congestion control is emulated on
the receiver side.
Delay-basedCongestionControlMechanismforVideoServices-MechanismincludingBackwardLoadingandReal-time
Modes
133

REFERENCES
Akan Ö. 2004. On the throughput analysis of rate-based
and window-based congestion control schemes.
Computer Networks 44 (2004). Pages 701-711.
Brakmo L, O’Malley S, Peterson L. 1994. TCP Vegas:
New Techniques for Congestion Detection and
Avoidance. ACM SIGCOMM London, UK. Pages 24-
35.
Cisco. 2012. Cisco Visual Networking Index: Forecast
and Methodology, 2011-2016. Retrieved 2.2.2013
from http://www.cisco.com/en/US/solutions/collateral/
ns341/ns525/ns537/ns705/ ns827/white_paper_c11-
481360_ns827_Networking_Solutions_White_Paper.h
tml.
Chiu D, Jain R. 1989. Analysis of the Increase and
Decrease Algorithms for Congestion Avoidance in
Computer Networks. Computer Networks and ISDN
Systems 17/1989 Pages 1-14.
Gupta M, Singh S. 2003 Greening of the Internet. ACM
SIGCOMM, Karlsruhe, Germany.
Hayes D, Armitage G. 2011 Revisiting TCP Congestion
Control using Delay Gradient. The proceedings of
NETWORKING 2011 10th International IFIP TC 6
Networking Conference, Valencia, Spain, May 9-13,
2011.
Huang Y, Guerin R. 2005. Does Over-Provisioning
Become More or Less Efficient as Networks Grow
Larger?. Proceeding of the 13th IEEE International
Conference on Network Protocols 2005.
Fall K. 2013. A collaboratoion between researchers at UC
Berkeley, LBL, USC/ISI, and Xerox PARC. NS-2
Manual. www.isi.edu/nsnam/ns/doc/index.html.
Floyd S, Handley M, Padhye J, Widmer J. 2008. TCP
Friendly Rate Control (TFRC): Protocol
Specification. RFC5348.
Kohler E., Handley M., Floyd S., 2006. Datagram
Congestion Control Protocol (DCCP). RFC4340.
Kuzmanovic A, Knightly E. 2006. TCP-LP: low-priority
service via end-point congestion control. IEEE/ACM
Trans. Netw. 14(4) August 2006. Pages 739–752.
Liang S, Cheriton D. 2002. TCP-RTM: Using TCP for
Real Time Applications. IEEE International
Conference of Network Protocols ’02.
Lundin H, Holmer S,. Alvestrand H. 2012. “A Google
Congestion Control Algorithm for Real-Time
Communication on the World Wide Web”. IETF
Informational Draft, Version 3.
Padhye J, Firoiu V, Towsley D, Kurose J, 1998.
"Modeling TCP Throughput: A Simple Model and its
Empirical Validation", Proc ACM SIGCOMM 1998.
Rejaie R, Handley M, Estrin D. 1998. Architectural
considerations for playback of quality adaptive video
over the internet. Technical report 98-686, CS-USC,
November 1998.
Rikli N. 2011. Self-similarity and stationarity of
increments in VBR video. King Saud University
Journal of King Saud University – Computer and
Information Sciences 4/2012 Pages 7-16, Retrieved
1.2.2013 from www.ksu.ede.sa.
Saltzer J, Reed D, Clark D. 1984. End- to- end arguments
in system design. ACM Transactions on Computer
Systems 2(4). Pages 277-288.
Shalunov S., Hazel G, Iyengar J, Kuehlewind M. 2012..
Low Extra Delay Background Transport (LEDBAT).
RFC6817.
Wang, Z., Crowcroft, J. 1992. Eliminating periodic packet
losses in the 4.3-Tahoe BSD TCP congestion control
algorithm. SIGCOMM Computer Communication.
Rev. 22(2). Pages 9–16.
Widmer H, Denda R, Mauv M. 2001. A Survey on TCP-
Friendly Congestion Control. IEEE Network May
2001, Volume:15 Issue 3,. Pages 28-37.
Wornell G. 1996. Signal processing with fractals: A
Wavelet Based Approach. Prentice Hall. 176 Pages.
Yang Y, Kim M, Lam S. 2001. Transient Behaviors of
TCP-friendly Congestion Control Protocols.
INFOCOM 2001. Twentieth Annual Joint Conference
of the IEEE Computer and Communications Societies.
Pages 1716 - 1725, vol.3.
WEBIST2014-InternationalConferenceonWebInformationSystemsandTechnologies
134
