
Analysis of Robust Implementation of an EMG Pattern Recognition
based Control
Simone Benatti
1
, Elisabetta Farella
1,3
, Emanuele Gruppioni
2
and Luca Benini
1,4
1
DEI, University of Bologna, Bologna, Italy
2
Centro protesi, INAIL, Vigorso di Budrio, Italy
3
ICT Unit, Fondazione Bruno Kessler, Trento, Italy
4
Integrated System Laboratory, ETHZ, Zurich, Switzerland
Keywords:
EMG, Patter Recognition, Multisession, Active Prosthesis.
Abstract:
Control of active hand prostheses is an open challenge. In fact, the advances in mechatronics made available
prosthetic hands with multiple active degrees of freedom; however the predominant control strategies are
still not natural for the user, enabling only few gestures, thus not exploiting the prosthesis potential. Pattern
recognition and machine learning techniques can be of great help when applied to surface electromyography
signals to offer a natural control based on the contraction of muscles corresponding to the real movements.
The implementation of such approach for an active prosthetic system offers many challenges related to the
reliability of data collected to train the classification algorithm. This paper focuses on these problems and
propose an implementation suitable for an embedded system.
1 INTRODUCTION
Assistive technologies in the last years are boosting
interesting research efforts to enhance quality of life.
In fact, the availability of accurate sensing technolo-
gies at a relatively low price and the possibility to ex-
ploit the power of low-cost low-power and fast mi-
crocontrollers enable a whole new branch of applica-
tions, where wearable smart sensors and embedded
systems can be used not only for monitoring but also
for the implementation of sensor fusion techniques or
complex machine learning algorithms and for provi-
sion of stimuli through actuation. An application field
such as the control of prostheses can greatly benefit
from this rapid technology evolution.
Recently, multi-finger active prostheses of the up-
per limb have appeared at commercial level (e.g.
Touch Bionics i-Limb, RSL Steeper BeBionics 3,
Otto Bocks SensorHand) enabling a larger set of ges-
tures w.r.t. previous prostheses, therefore asking for
an adequate strategy for their control. State of the
art technologies for the feed-forward control of ac-
tive hand prostheses are controlled via surface elec-
tromyography (EMG) in a way that forces the user to
learn to associate contraction of what remains of the
muscle to unrelated postures of the prosthesis, e.g.,
sequences of wrist flexion and extension correspond
to various gestures. While at one side these tech-
niques grant a good reliability and short activation
time (within 30ms for the detection of the activity and
less than 300ms for the classification), on the other
side the control strategy is non-natural, requiring fo-
cus and a non-trivial learning curve for the user. It
would be desirable instead to command the prosthe-
sis movement by activating the muscle as to move the
phantom limb.
Luckily, scientific literature recently proved that
machine learning applied to EMG signals could be
beneficial in prosthetics to bring the control towards
more intuitive and natural strategies. In fact, convinc-
ing results have been shown both on healthy subjects
(Englehart et al., 2001) and amputees (Castellini et
al., 2009). This paper describes the preliminary anal-
ysis done in an on-going work towards a real-time
embedded implementation of an EMG based control
of an active hand prosthesis by use of machine learn-
ing techniques and in particular by use of a Support
Vector Machine. Starting from the lesson learnt by
literature, this work faces, as first step, the variability
on classification results due to the changes in place-
ments of the EMG sensors that occurs in real life. In
fact, the wearer limb is subject day by day to physical
differences due to swelling, fatigue, perspiration that
can cause misplacements of the sensors w.r.t. the de-
45
Benatti S., Farella E., Gruppioni E. and Benini L..
Analysis of Robust Implementation of an EMG Pattern Recognition based Control.
DOI: 10.5220/0004800300450054
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2014), pages 45-54
ISBN: 978-989-758-011-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

sired position. Furthermore the same gesture can be
performed in various positions and orientation of the
arm (along the body, lifted up, etc.). These changes
affects the classification performance and must be ad-
dressed properly.
Starting from a data collection repeated in differ-
ent days on 10 healthy subjects, this paper proposes
the analysis of the reliability of the gesture recog-
nition in an EMG signal controlled hand prosthesis.
The analysis takes into account that our final target is
an embedded implementation. The analysis is based
on three main elements: (i) the selection of a cor-
rect signal acquisition chain, (ii) the analysis of the
physiological best placement of the EMG sensors to
grant a robust classification, and (iii) the analysis of
the performance of the system through days, evalu-
ating the difference of performance when the sensors
are placed and removed in different sessions, as in the
real use of the device for the classification of natu-
ral movements. The activation of the same gesture is
considered in multiple combinations of the arm orien-
tation and position to better study their influence on
the classification performance and consequently im-
prove the robustness of the classifier.
The paper is organized as follows. Section 2 il-
lustrates background and related works,Section 3 in-
troduces the architecture of the system used to get the
EMG signals. Section 4 describes the tests made with
the collected data. In section 5 we show the results
and discuss the solution advantages. Finally in sec-
tion 6 we draw the conclusions.
2 BACKGROUND AND RELATED
WORKS
Three types of prostheses are widely available for
people with upper limb amputations: passive, body
powered, and electrically powered. Passive prosthe-
ses are often employed for cosmetic purposes and
have limited functionality. Body-powered prostheses
are used to restore basic tasks such as opening and
closing a terminal device. These devices are often
used because they are simple, robust, and relatively
inexpensive. The user can actuate electrically pow-
ered or active prostheses but they are advantageous
w.r.t. body-powered ones because they require less
user effort, as movement is actuated with DC mo-
tors. They can be controlled through a variety of
means such as force sensors, linear potentiometers,
and EMG signals. Electrically powered prostheses re-
store some functionality to amputees, but control of
these devices is typically limited to only one or two
degrees of freedom.
As mentioned, however, recently, multi-finger ac-
tive prostheses of the upper limb have appeared at
commercial level (Bebionics, 2012, TouchBionics,
2013, Ottobock, 2009). These prostheses, driven
by EMG sensors, can replicate most of the princi-
pal movements of the hand. To achieve robustness
the movement of the active prostheses are typically
driven by non-natural activation patterns, i.e. they
decode mainly sequence of flexion and extension of
the wrist (Castellini and Smaag, 2009). The most
accurate EMG signal is taken directly on the spot
near the muscular fibers by use of implantable sens-
ing electrodes; however, they are invasive and pose
safety issue, needing surgery. Our proposed applica-
tion prefers surface EMG sensors. They suffer lack of
performance, due to the noise of the skin surface and
the crosstalk of near muscle. Nevertheless we can use
improving signal methods (Reaz et al., 2006) for a
machine learning approach.
In literature, machine learning algorithms chosen
to extract muscular pattern and classify gestures vary
from Linear Discriminant Analysis (LDA) classifier
(Young et al., 2013) to Neural Network (Matsumura
et a.l, 2002). Liarokapis and al. (2012) compare a
set of classifiers for EMG signal and conclude that
SVM (Boser et al., 1992) is the most accurate algo-
rithm for pattern recognition with these kind of sig-
nals. Other works, like (Oskoei and Hu, 2008) and
(Chen and Wang, 2013), made comparison for EMG
pattern recognition and conclude that SVM gives the
best result for these signals. The work of Englehart
and al. (2001) studies how to enhance the perfor-
mance of the SVM algorithm to reach the best accu-
racy of the classification, by optimizing the classifi-
cation parameters and the feature extraction. These
works give contributions in field of signal processing
because they propose an optimized solution to a clas-
sification problem, but they do not keep in account the
issues related to the use in daily life use, like for ex-
ample the variation of classification accuracy during
arm movements, or the sensor misplacing due to day
by day application of the prosthesis.
Some papers show experiments with a high num-
ber of subjects and features to test the accuracy of
their classification algorithm. These results reach ac-
curacy ratio near 100% but they are not applicable
in real scenarios, because they do not take into ac-
count the variability of the signal caused by the place-
ment of the EMG sensors. The misplacement of the
EMG electrodes among different sessions and the po-
sitions of the arm during the use of the prosthesis af-
fect the classification performance. This work tries to
address the problem analysing the best placement of
four EMG sensors to maximize the recognition per-
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
46

formance. Furthermore, we analyse the variability of
training data along different days and caused by dif-
ferent positions of arm and forearm while performing
the same gesture.
3 SYSTEM SETUP
3.1 EMG Signal Acquisition
The EMG signal measures the electrical activation of
the muscular fibres. Muscle tissue conducts electrical
potentials similar to the way nerves do and these elec-
trical potentials are named muscle action potentials.
When EMG electrodes are placed on the skin surface
the signal is composed by all the action potential of
the fibres underlying the electrode. The surface EMG
sensors are made by two metal plates each one con-
nected to the inputs of a differential amplifier that can
sense the action potential of muscular cells.
The amplitude of this signal is 20mV (-10 to +10),
with a bandwidth of 2000Hz. This kind of signals are
also very noisy and difficult to manage. The main
causes of this noise are the motion artefacts, the elec-
trical equipment noise and the floating ground noise,
because the body is not referred to a solid ground po-
tential. To obtain information useful for the classi-
fication algorithms, it is required that sensors min-
imize the noise and provide significant quantitative
pattern of muscular activation. For these reason we
used, instead of classical differential sensors, the Ot-
tobock 13E200 (Figure 1), a family of pre amplified
sensors with single ended output (Ottobock, 2009). In
Ottobock sensor the EMG signal is amplificated and
integrated to reach an output span of 0 - 3.3V, ideal
for the single ended stage of an embedded microcon-
troller ADC.
The bandwidth of the Ottobock sensor is 90-
450Hz with a further notch filter for the 50Hz. This
is because the sensors for the classification of the ges-
tures do not need extensive frequency information but
a clear low noise signal. The analog signals are ac-
quired from an embedded board based on ARM COR-
TEX M4 microcontroller. The internal 16-bit ADC
samples the data and an external Bluetooth interface
sends it to a laptop. The embedded custom solution
is preferable with respect to a data logger solution in
this application because the final goal is to implement
a complete embedded real time system. The board
used for this application is shown in Figure 2. The
data collected by the PC are managed in Matlab, for
the signal processing and the pattern recognition.
Figure 1: Ottobock sensor.
Figure 2: Embedded board.
3.2 Sensor Placement
The position of sensors is a critical task in using
a limb prosthesis. Muscles in healthy subjects are
placed in known position and it is possible to have lit-
tle differences in the amplitude of the activation signal
or in the position of EMG sensor. Amputees presents
specific characteristics in muscular structure and dif-
ference of amplitude of activation signal if compared
with healthy subjects and, for this reason, it is impor-
tant to evaluate subject by subject the possibility for
an amputee to use an active prosthesis. The position-
ing strategy is tested on healthy subject in this paper
and the test on amputees is the goal of future works.
Our strategy started from a previous work of
Castellini et al. (2009), that placed 5 sensors on an
elastic strip, with an equal distance each others. The
idea was to consider a sort of general pattern of the
forearm muscle activation, without focusing attention
on the anatomical structure of the arm. The risk of
such approach is to lose the contribution of one or
more sensors if misplaced. We propose an approach,
based on a four sensors configuration, in two steps: a
AnalysisofRobustImplementationofanEMGPatternRecognitionbasedControl
47

theoretical one that considers the muscles involved in
hand movement and a practical one that verifies the
good placement of the electrodes and the information
given from all sensors.
The theoretical approach starts from the analysis
of the muscular tissues of the limb. Signals have max-
imum quality where the muscle is wider, and the mus-
cular fibres are spread. In the upper limb, the optimal
zone is the proximal third. In the forearm, the mus-
cles are divided in four groups, and the use of sur-
face EMG sensors requires that muscle near the skin
surface must be preferred for the classification. We
can divide the forearm muscles in two groups: mus-
cles in the internal part of the forearm (flexor radi-
alis carpi, palmares longus, flexor carpi ulnaris, flexor
superioris digitalis), involved in flexion movements,
and muscles placed in the external part of the forearm
(externsor comunis digitorum, extensor digiti minimi,
externsor carpi ulnaris), involved mainly in extension
movements.
Nevertheless, the theoretical selection of muscles
is not sufficient, because in the practical case the elec-
trode catches a zone of many muscular fibres, intro-
ducing noise and requiring to verify the usability and
the integrity of the target signal. Forearm was divided
in different zones considering the dimension of the
selected Ottobock sensors. The zones are numbered
with progression, starting from the flexor carpi radi-
alis, with counter clockwise sequence. Sensors are
placed on the muscle primarily involved in movement
selected. The muscles are found with tactile anal-
ysis and the corresponding number is used to place
the sensor on the elastic strip used in this experiment
(Figure 3).
By placing sensors on the flexor carpi radialis,
flexor carpi ulnaris, extensor digitorum communis
and extensor carpi ulnaris we obtained a good differ-
entiation in classification pattern. The assumption for
a pattern recognition control system is that the set of
signals and features describing a given state of muscu-
lar activation are different from one state of activation
to another. Figure 4 shows the gesture of the hand
and the corresponding activation pattern acquired by
the four sensors. The amplitude of each of the four
sensors is a clear discriminant among patterns, even
if the presented solution is not intended as the best
Figure 3: Muscle selection.
Figure 4: EMG amplified signal pattern for selected ges-
tures.
placement, because the final target of this application
is the use of the board on transradial amputees, and for
these patients the placement strategy must be tuned
subject by subject.
3.3 Classification of the Data
A pattern recognition algorithm classifies the differ-
ent hand gestures. The control is considered a super-
vised classification problem. Training data are col-
lected during the controlled training session and a set
of labels are assigned to each pattern to train the clas-
sifier. SVM is a machine learning technique used for
pattern recognition (Burges, 1998). SVM goal is to
found the optimal separation hyperplane between two
classes. Support vectors are samples of the training
dataset used to build the separation hyperplane.
In the SVM algorithm, only the data of the train-
ing set are used to create the separation hyperplane
and maximize distance between plane and datasets.
Sometimes data are not linearly separable, and SVM
algorithm can map the predictor on a higher dimen-
sion space, where it is possible to separate data. If
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
48

the system becomes too complex and the calculation
of the Euclidean distance between the point of the
dataset and the separation hyperplane becomes too
hard, SVM can introduce Kernel functions. These
kind of functions operate in a feature space and calcu-
late only the inner product between images of all pairs
in the feature space instead of the Euclidean distance
in a high dimensional space. This operation is com-
putationally simple and allows using SVM with high
dimensional classification problems. Initially the al-
gorithm was developed only for a 2-class problem, but
it is possible to expand it with a One Versus All ap-
proach. The implementation of the SVM algorithm
used in this paper is taken from libSVM (libSVM,
2011) a freeware library implemented for Matlab and
C, compiled by GCC and usable in embedded sys-
tems.
The EMG signals present differences from one ac-
quisition to another. This behavior is due to many fac-
tors, clinical, electrical, and patient dependent. The
not fully repeatable placement of the electrodes that
can generate different traces and crosstalk, the differ-
ent muscular contraction strength due to fatigue or re-
peated muscular activity, the variable conductivity of
the skin surface, due to humidity, perspiration or other
physiological and environmental condition, can in-
duce significant changes in the shape of the activation
pattern. Some training strategies can try to overcome
this problem. In the work of Hargrove et al. (2008),
authors used a sort of extended dataset method, based
on particular high density EMG system. The dataset
collected using these sensors can make more robust
the training phase but it is difficult to use this system
in a real application. Furthermore, it is not consid-
ered that the activation patterns can change in differ-
ent days and for different position of the arm. For this
reason, an important part of this work is a collection
of a robust dataset of EMG signals.
3.4 Acquisition Protocol Description
The collection of the dataset follows an acquisition
protocol described in this paragraph. Selected move-
ments are the most common hand gesture used in
daily life, to ensure a good quality of social reintegra-
tion. Gesture selected are shown in Figure 4 (closed
hand, open hand 2-finger pinch, 3-finger pinch, point
index).
The classification includes also the rest position of
the hand, recorded between two subsequent gestures.
There are 9 subjects involved in the dataset acquisi-
tion. Gestures are acquired in 10 sessions collected 1
for day in 10 days not necessarily consecutive.
The sequence of gestures is repeated and scram-
bled in four arm positions (Figure 5). Each acquisi-
tion session is divided in 4 steps, one for each position
of the forearm. The collected sequence is composed
by 10 repetitions of muscular contraction 3 second
long. Between each contraction there are 3 seconds
of rest. One file for each acquisition is captured. Sub-
jects wear an elastic strip with the 4 EMG sensors.
Figure 5: Different arm position.
Sensors positions are tuned with a simple proce-
dure described below. An arm as shown in Figure 6.
The operator ideally traces a line on the axial direc-
tion of the forearm (Figure 6-left). Then the opera-
tor places Sensors 1 and 2 at 30mm respectively on
the left and on the right side of the line at the prox-
imal third of the forearm. The operation is repeated
for sensors 3 and 4 with the arm flex in the position
shown in Figure 6-right by considering the ideal line
and placing sensor 3 and 4 at 30mm of distance sym-
metrically at the two sides of the line, at the proxi-
mal third of the forearm. Once the sensor are placed,
a good positioning signals trace is acquired to avoid
misplacement of the strip. The test is made with the
gestures of hand open and closed,, which correspond
to a non-zero signal for all the sensors.
To avoid that the subject learns the sequence of
gestures and loses the naturalness in movements, the
sequence are scrambled and each acquisition in a dif-
ferent arm position has a different pattern of gesture.
Figure 6: Sensor placement.
AnalysisofRobustImplementationofanEMGPatternRecognitionbasedControl
49
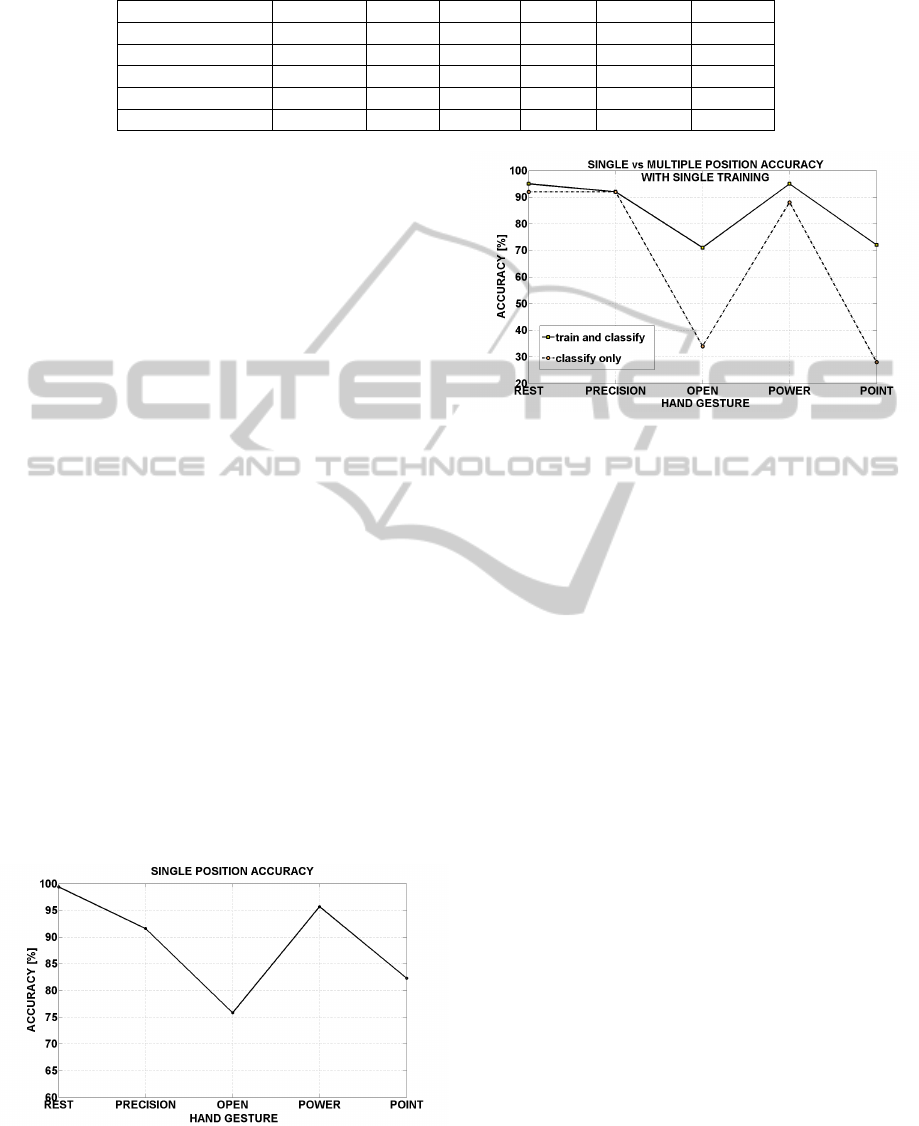
Table 1: Confusion matrix for single training session.
ACCURACY % REST PREC OPEN POWER POINT
99,4 REST 77185 118 0 339 0
91,6 PREC 149 24992 0 1688 445
75,8 OPEN 125 416 10088 2689 0
95,7 POWER 186 162 6 14745 302
82,3 POINT 82 756 0 1820 12371
For the same reason, the positions of the arm are not
always in the same sequence: for example in ses-
sion 1 sequences are captured in distal position and
in proximal position, in session 2 these sequence is
inverted, and scrambled with different pattern of ges-
ture in other sessions.
4 EXPERIMENTAL RESULTS
The implementation of a pattern recognition system
in a real application for the gesture classification has
three main issues: the correct placement of the EMG
sensors, the variability of the activation pattern due
to the various positions of the arm and the varia-
tion of muscular contraction among following acqui-
sition sessions. The importance of this aspect is ac-
knoledged in literature, where other works address
specifically the problem of placement and the dif-
ference between surface and intramuscular sensors
(Hargrove et al., 2007) and propose their placement
schemes. The training of the SVM is a critical phase
since the quality of the training and the resulting ma-
trix strictly affects the fidelity of the recognition. In
turn, the segmentation phase performed on data col-
lected is therefore crucial to augment the quality of
the training. However data preparation, thresholding
and segmentation are subjective operations based on
the knowledge of the signal and on experience (Milo-
sevic et al., 2010).
Figure 7: Accuracy for a single training session.
Figure 8: Difference of accuracy between classification in
the position of the training and in other arm position.
4.1 Single Arm Position Classification
Our first purpose for the experiments is to verify the
performance of the proposed placement scheme, to
guarantee that a good classification is possible. For
this application, we considered only the three fin-
gers precision grip, because many commercial pros-
thetic systems, in the operating configuration, admit
to choose between two or three finger precision grips.
In the initial test, we considered only one session
dataset (i.e. 10 gestures per position) per each patient.
The training set is the 25% of the session dataset (i.e.
3 gestures per repetition) obtained with manual seg-
mentation. The training stage is performed offline on
MATLAB libSVM. After the creation of the model,
the classification gives the mean accuracy for each
gesture. We selected the proximal position of the arm
because it is natural and tipically used in the EMG test
on pattern recognition accuracy. The data presented
are the result of the mean values of accuracy for all
subject involved in the experiment. Confusion ma-
trix (Table 1) shows that the rest position, the power
grip and the precision grip are the gestures recognized
with higher accuracy.
The open hand and the index point gestures are
recognized with lower accuracy because it is more
difficult for the subject to repeat them exactly. Av-
erage classification accuracy is between 75% and
99.4%, as shown in Figure 7. This data validates the
positioning strategy proposed and the setup used in
our approach, because results meet the performance
declared in literature on this topic.
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
50

4.2 Different Arm Position
Classification
The variability in arm position is another important is-
sue, when an EMG classification system is proposed
for upper limb prostheses. Scheme et al. (2010) and
Fougner et al. (2011) start to analyse this problem and
propose a solution based on the placement of two in-
ertial sensors used to detect the exact position of the
limb. The position of sensors is on the arm and fore-
arm and the combination of their information is used
to detect the arm position. This approach is interest-
ing, however it presents some practical problems if in-
tegrated in user daily routine. The solution presented
is not integrated; the EMG board and inertial sensors
are on separate boards and need separate power sup-
ply and a communication infrastructure. Furthermore,
the system requires frequent calibrations due to the
misplacement of inertial nodes on the body.
In this section, we evaluate the performance im-
provements coming by the use of an additional train-
ing session, which combines samples of the patterns
from the different arm positions without modifying
the test setup. The use of an excessively large training
sets in traditional machine learning approach is not
recommended, because usually the number of support
vectors created by the algorithm is too high to guaran-
tee a strong classification and a computational charge
suited for an embedded implementation.
In the case study, we identified the most common
positions of the arm in which a grip action of the hand
is required. Positions are shown in Figure 5. Initially
a training session is performed for each patient only
in the proximal position of the forearm and the clas-
sification performance is evaluated for the other limb
position in the same acquisition session without fur-
ther training.
Figure 8 plots the difference of accuracy in classi-
fication with arm positions not included in the train-
ing, showing the decreasing of performance com-
pared with the classification in the position used for
training. Even in this case the open hand and the
point gestures suffer lack of performance. To verify
the efficiency of the training made for the different
positions of the arm, in Figure 9 the recognition ac-
curacy obtained by the SVM classifier is shown when
training on one position compared with the training
in multiple positions. This strategy gives major bene-
fits to the classification of the two gestures with major
recognition errors because includes in the training set
the gesture with more variability.
Figure 9: Single vs multiple position training.
4.3 Multisession Classification
Performance
The activation patterns of EMG sensors is strongly
dependent from the position and the orientation of the
electrodes (Young et al., 2012). Small displacements
of the sensors among the sessions can create big dif-
ferences in the EMG traces and consequently reduce
significantly the accuracy of the classification. The
difference of classification performance in this paper
considering the training made on a single session or
on two different sessions. The work of Saponas et al.
(2010) uses an 8 electrodes system and evaluates the
performance of the system in 3 different sessions. The
proposed system has 8 electrodes and the set of ges-
tures chosen targets HCI applications, instead of our
daily use grasping types. Neverthless the results of
this work can confirm the decreasing trend of the per-
formance caused by misplacement. The SVM in this
experiment is trained by merging the support vectors
determined in the previous tests and the vectors of an
additional session.
With this procedure, it is possible to observe the
behaviour of the recognition accuracy dependent from
the two sessions. The first test uses the complete
training session of the last paragraph to evaluate the
accuracy of the classifier among the different ses-
sions. The sequences of the movements are coded
in the acquisition protocol and for each trace the dif-
ferent movements can be located. The prediction of
the SVM algorithm is used on all the traces, and the
mean value of accuracy are collected for each patient.
The single training session cannot satisfy minimum
requirements for reliability of classification. The dif-
ferences of accuracy in the 5 gestures are shown in
Figure 10.
The procedure to place the electrodes, described
in session 2, is standardized and repeated for all sub-
jects; however still little inconsistency in position of
the electrodes can cause big differences in muscular
activation pattern. To cope with this issue, we evalu-
AnalysisofRobustImplementationofanEMGPatternRecognitionbasedControl
51

Figure 10: Single vs double training session.
ate the use of multi-stage training and compare the ac-
curacy per arm positions in single versus double train-
ing session. The extended training merges two train-
ing sessions to create a unique training model. This
kind of training method enhances the performance of
the classification accuracy as shown in Figure 11.
Figure 11: Single vs double training session in different po-
sitions.
5 DISCUSSION
The results of the experiment show that a robust clas-
sification for EMG signals cannot be achieved with-
out considering the issues coming from the electrodes
placement, which can present differences, even if
slight, from one use to another and/or day by day. Fur-
thermore, this work outlined the differences in classi-
fication accuracy, which occur for the same gesture
performed in diverse positions of the arm (parallel
to the ground, proximal to the body, lifted upwards,
etc.). The idea behind this paper is that multiple ses-
sions training is necessary for a realistic application
and a SVM with light signal filtering can give good
accuracy in recognition of activation of muscular pat-
terns.
The proposed setup is ideal for an embedded im-
plementation, because the hardware setup is simple
and the signal processing is light weight, suitable on
a microcontroller. The EMG signal is filtered and
de-noised directly by the sensors, and the hardware
signal conditioning allows to have well differentiated
patterns even with a four sensors setup and small dig-
ital filtering.
The SVM training algorithm is quite heavy from
the computational point of view and runs on a PC ap-
plication offline, but it is possible to implement the
classification on embedded platform maintaining re-
sponse time compatible with the use of a prosthesis.
The computational time of the prediction function is
in the most part dependent from the number of Sup-
port Vectors present in the model. More support vec-
tors indicates a complex model due to overlapping of
different patterns. The choice of an appropriate train-
ing set and the tuning of the algorithm parameters can
reduce the number of support vectors. Obviously the
model becomes more complicated when multiple ses-
sions and multiples arm positions are considered.
Figure 12 shows the number of support vectors in
different cases of the experiment.
Figure 12: Suport vectors number in different testing con-
ditions.
The platform used for the implementation of the
SVM classification algorithm is an ARM Cortex M4,
with 100MHz clock. The execution time of the clas-
sification routine is measured to understand if the us-
age of an embedded low cost platform can satisfy the
specification of the system. The test is performed with
different models, changing the kernel type and the
number of the support vectors, to evaluate the trade-
off between complexity and response time of the al-
gorithm.
Figure 13 and 14 shows the computation time ob-
tained with FPU (Floating point unit) calculations.
The response time allows to use the embedded plat-
form to implement an active control of the prosthesis,
with linear or RBF (Radial Basis Function) kernels.
The number of support vectors can be reduced with
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
52

Figure 13: Linear kernel computation time.
Figure 14: RBF kernel computation time.
an appropriate training sample selection and with the
tuning of model made on the single subject. In this ex-
periment we did not perform optimization of the pa-
rameters or differentiated selection of the samples in
creating the training models. This choice is intended
to show the starting point in implementing an embed-
ded application and wants to contribute in evidenc-
ing and focusing on the problems and the issues that
become critical in the implementation of this kind of
devices.
6 CONCLUSIONS
In this analysis we found that the main challenge for
the classification accuracy in a real application of an
EMG interface is the acquisition interface, intended
as the choice of the kind of sensor used and placement
strategy. We proved that 4 sensors correctly placed
and a light signal processing can give high classifi-
cation accuracy, comparable with systems with more
sensors and a signal processing with higher computa-
tional cost. It is not possible now to obtain good per-
formance without considering the difference of classi-
fication in different arm positions and among multiple
sessions, if EMG surface sensors, which can be re-
moved, are used. The strategy of a double trining ses-
sion, in different days, is compatible with the clinical
scenario, because it is normal for a patient with an up-
per limb prosthesis to have periodical check-up of the
prosthesis with technicians and doctors. Future works
will test this methodology on subjects with transradial
amputation of forearm, to optimize and standardize
the placement methodology.
Another important challenge that we intend to
achieve is the optimization of the parameter of the
classification algorithm, which can speed up commu-
tation time and enhance classification ratio, for exam-
ple with a proper data thresholding and scaling and
test with different kernels. The final goal is to inves-
tigate all the problem related to a real and reliable ap-
plication and to come to an embedded implementation
of the control interface.
ACKNOWLEDGEMENTS
This work is partially funded by Centro protesi, IN-
AIL in Vigorso di Budrio, Italy that also supported
the definition of requirements and of the acquisition
protocol.
REFERENCES
Bebionics (2012). http://bebionic.com/.
Boser, B. E., Guyon, I. M., and Vapnik, V. N. (1992). A
training algorithm for optimal margin classifiers. In
Proceedings of the fifth annual workshop on Compu-
tational learning theory, pages 144–152.
Burges, C. (1998). A tutorial on support vector machines
for pattern recognition. Kluwer Academic Publishers.
Castellini, C., Gruppioni, E., Davalli, A., and Sandini, G.
(2009). Fine detection of grasp force and posture by
amputees via surface electromyography. volume 103,
pages 255–262.
Castellini, C. and Smaag, P. (2009). Surface emg in ad-
vanced hand prosthetics. pages 35–47. Springer-
Verlag.
Chen, X. and Wang, Z. J. (2013). Pattern recognition of
number gestures based on a wireless surface emg sys-
tem.
Englehart, K., Hudgin, B., and Parker, P. (2001). A wavelet-
based continuous classification scheme for multifunc-
tion myoelectric control. In IEEE Transactions on
Biomedical Engineering, pages 302–311.
Hargrove, L., Englehart, K., and Hudgins, B. (2007). A
comparison of surface and intramuscular myoelectric
signal classification. volume 54, pages 847–853.
libsvm (2011). http://www.csie.ntu.edu.tw/ cjlin/libsvm.
Matsumura, Y., Mitsukura, Y., Fukumi, M., Akamatsu, N.,
Yamamoto, Y., and Nakaura, K. (2002). Recognition
of emg signal patterns by neural networks. In Neural
AnalysisofRobustImplementationofanEMGPatternRecognitionbasedControl
53

Information Processing, 2002. ICONIP ’02. Proceed-
ings of the 9th International Conference on, volume 2,
pages 750–754 vol.2.
Milosevic, B., Farella, E., and Benini, L. (2010). Continu-
ous gesture recognition for resource constrained smart
objects. In UBICOMM 2010, The Fourth Interna-
tional Conference on Mobile Ubiquitous Computing,
Systems, Services and Technologies, pages 391–396.
Oskoei, M. and Hu, H. (2008). Support vector machine-
based classification scheme for myoelectric control
applied to upper limb.
Ottobock (2009). http://www.ottobock.com.
Reaz, M., Hussain, M., and Mohd-Yasin, F. (2006). Tech-
niques of emg signal analysis: detection, processing,
classification and applications. Springer-Verlag.
Touchbionics (2013). http://www.touchbionics.com.
Young, A., Hargrove, L., and Kuiken, T. (2012). Improv-
ing myoelectric pattern recognition robustness to elec-
trode shift by changing interelectrode distance and
electrode configuration. In Biomedical Engineering,
IEEE Transactions on, pages 645–652.
Young, A., Smith, L., Rouse, E., and Hargrove, L. (2013).
Classification of simultaneous movements using sur-
face emg pattern recognition. In Biomedical Engi-
neering, IEEE Transactions on. IEEE.
BIOSIGNALS2014-InternationalConferenceonBio-inspiredSystemsandSignalProcessing
54
