
Appropriate Multi-core Architecture for Safety-critical Aerospace
Applications
Certifiable Real-time Switching Network
Stephan C. Stilkerich
1
, Christian Siemers
2
and Christian Ristig
2
1
EADS Innovation Works, Willy Messerschmitt Str. 1, Munich, Germany
2
Department of Computing, University of Technology Clausthal, Clausthal-Zellerfeld, Germany
Keywords:
Safety-critical, Multi-Core, Network on Chip, Bene
˘
s-Network, Real-Time Switching, Aerospace, Certifiable.
Abstract:
The continues improvement of aircraft’s as well as the steady optimization of the overall air traffic during
the last decade increased the demand for processing power in the aircraft and on ground, simultaneously.
Multi-Core platforms could offer the demanded processing power and form factor, but today’s multi-core
components are principally not usable for any safety critical industry and especially not usable for the avionic
domain, because these components are optimized for average case performance and not for full fledged pre-
dictability. This is especially true for the inter-core communicaton network. We argue that a regular and low
overhead Bene
˘
s-Network communication structure between the cores and between the cores and the shared
resources, can smoothly pave the way for certification of multi-core architectures in the avionic domain. The
presented details on the regular structure of the network, the scheduling variants discussed in the paper and
the currently on-going research work to proof profound theoretical limits, bounds etc. substantiate our claim
for an utilization of multi-cores in the avionic domain and with respect to the valid regulations for airborne
equipment.
1 INTRODUCTION
Since more than a decade profound improvements of
the aircraft itself and the overall air traffic manage-
ment have continuously and substantially increased
the demand for processing power in that field. Typ-
ical improvements include (1) the Fly-by-wire sys-
tems, (2) tighter aircraft separation during take-off &
landing, (3) on-board maintenance and (4) provisions
to reduce the environmental impact (noise, fuel us-
age). At the aircraft level, the fly-by-wire system is
one of the most well known examples where com-
puter systems have been introduce. The traditional
hydraulic systems have been replaced by electrical
components and a processing platform with software
that performs and monitors these kinds of avionic
functions. Furthermore this system ensures that the
pre-defined flight envelopes are respected. Summa-
rizing, today’s modern aircrafts execute about 8-10
million lines of code on processing platforms that are
classified as safety critical. At the air traffic man-
agement level, new functions to optimize and make
the overall air traffic safer include tighter separations
of the aircrafts during take-off and landing, collision
warning systems and also the navigation at the air-
ports for short and congestion free paths. Again, all
these functions call on the one hand for massive pro-
cessing power and on the other hand are classified as
safety critical.
Due to the strict safety regulations enforced by
independent authorities worldwide and the need to
achieve product certification, so far only dedicated
single core platforms have been utilized. In detail, the
reason why only dedicated single core platforms have
been deployed so far is founded by the fact that for
system or sub-system certification deterministic worst
case behavior with no single point of failure has to
been proven. Currently all multi-core architectures
and platforms have the following issues during certi-
fication (Stilkerich, 2013):
• Single point of failure with respect to the clock
and power lines. Failures in a clock or power
line affects the complete multi-core and hence all
functions.
• Shared caches posses a complex access pattern
and coherence strategy. A deterministic or pre-
dictable behavior is extremely difficult to proof.
180
C. Stilkerich S., Siemers C. and Ristig C..
Appropriate Multi-core Architecture for Safety-critical Aerospace Applications - Certifiable Real-time Switching Network.
DOI: 10.5220/0004801901800185
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages
180-185
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
• Inter core communication network is mostly op-
timized for average case performance and non-
deterministic. Consequently, not suitable for cer-
tification.
• Access to shared resources are non-deterministic
and hence not suitable for certification.
In this position paper we argue for determinis-
tic and real-time switching networks, Baseline and
Bene
˘
s network, to systematically address the last two
points mentioned before. The regular and low over-
head structure, composed of simple switching ele-
ments, offer unmatched advantages and solutions for
safety critical systems and in the end a way forward
towards certification of multi-core architectures.
The rest of the paper is organized as follows:
Section 2 provides some more background on the
aerospace regulations and processes that have to be
fulfilled to receive sub-system or system certification.
The focus will be on the dedicated regulations for
software and hardware. Section 3 presents the current
status of our research work on the proposed network
structure and preliminary results from first implemen-
tations and experiments.
2 SAFETY REGULATIONS
Each and every airborne component undergoes a strict
and rigorous qualification process to proof that the
component fulfills all its requirements and can fi-
nally receive credits for certification. These pro-
cesses are described in different official documents
respectively regulations (RTCA, 2013). Two regula-
tions are of central interest for our discussion, namely
the DO-254 called ”Design Assurance Guidance for
Airborne Electronic Hardware” addressing electronic
hardware, including CPLDs, FPGAs and processors
as well as the DO-178B called ”Software Considera-
tions in Airborne Systems and Equipment Certifica-
tion” that addresses all kind of software that is exe-
cuted, ranging from drivers, operating systems to ap-
plication software.
Obviously, both specific regulations for electronic
hardware and software have strong dependencies and
influence each other. But both regulations also share a
common underlying principle, namely that both force
the development (HW or SW) towards correctness
by construction and not by testing to identify possi-
ble errors. Correctness implies for safety critical ap-
plications also deterministic worst case behavior of
the hardware and the software that runs on a specific
hardware platform. Hence a predictable and deter-
ministic switching network between the cores is fun-
damental for the certification of any multi-core plat-
form. Without that elementary feature of the core-to-
core network no certification with respect to DO-254
or DO-178B of the hardware and the executed soft-
ware on that platform is ever possible.
Hence we argue for the following structure and
approach of the network that is certifiable.
3 NETWORK
As inter-processor communication shall be performed
by a Network-on-Chip (NoC), the obviously neces-
sary requirement is that this NoC must be real-time-
capable. Therefore, switched networks-on-chip were
and are the first choice for further research. Switched
networks were studied in the past, a comprehensive
summary is e.g. given in (Newman, 1988). Switched
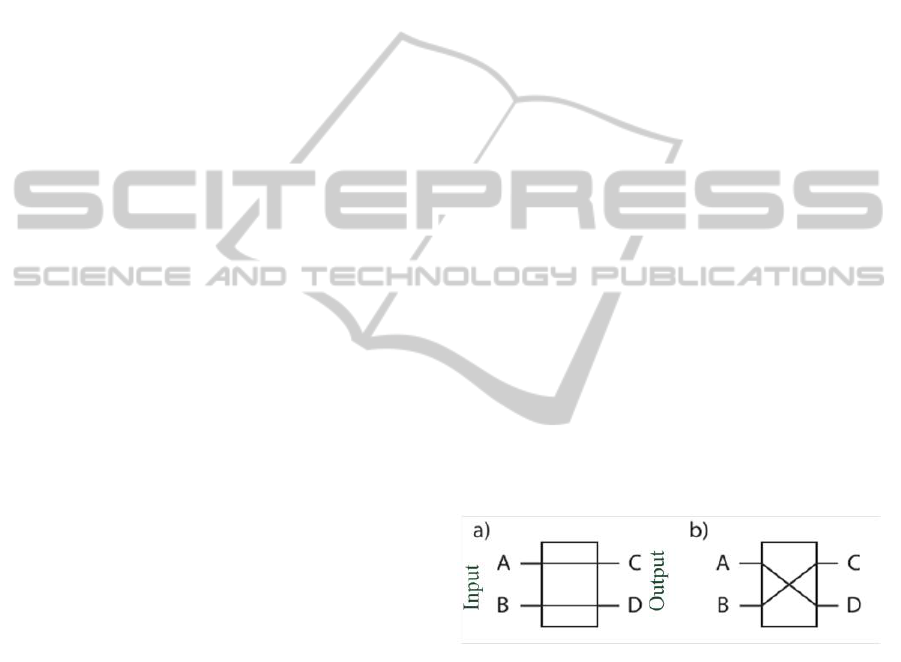
networks are mostly based on cross-bar-switches as
shown in Figure 1 (Aust, 2013). To configure a switch
like this, only one bit is required. To connect 2
k
(=
N) sources to any of 2
k
destinations (or any number
less than these limits), at least k layers, each consist-
ing of 2
k−1
cross-bar-switches, are used. This forms
the so-called baseline network as shown in Figure 2.
The baseline network uses the inverted shuffle per-
mutations (-1): For N = 8, the first layer permutes
2
3
= 8 − 1 lines, the second divides into two sub-
layers each with 2
2
= 4 lines, and the third layer con-
sists of 4 subsections permuting each 2 lines.
Figure 1: Cross-bar switch: a) Bar configuration, b) cross
configuration.
The baseline network shows significant advan-
tages concerning resource consumption and routing.
The network resources scales with N * log N, N be-
ing the number of sources and destinations (= 2
k
), and
it is capable of connecting any source to any destina-
tion. Furthermore there are permutations of sources
and destinations that can be connected simultaneously
as well, but this is not guaranteed for every permuta-
tion: Actually, most permutation can not be routed
simultaneously.
The second advantage is the capability of local
routing. There is exactly one way between any source
and any destination. This results in using the destina-
AppropriateMulti-coreArchitectureforSafety-criticalAerospaceApplications-CertifiableReal-timeSwitchingNetwork
181

Figure 2: Baseline network for N=8, [Aust13] [AR10a]
[AR10a].
tion address for routing as shown in Figure 3 (includ-
ing a routing conflict).
Figure 3: Local routing for baseline network [Aust13]: The
CBS-configuration depends on the destination address bit
resulting in routing conflicts.
As there exists only one way between any
source/destination pair, the local routing is very easy
and straightforward. At any layer of the switch-
ing network, the corresponding address bit decides
whether to use the upper (address bit: 0) or lower (1)
output, and no global routing is required. This enables
the usage of self-synchronizing networks as discussed
below.
The above mentioned disadvantage, the lock of
required routes by already existing routes, must be
solved for receiving real-time capability. To perform
this, at least three scenarios are worth for further re-
search:
• Scheduling,
• Self-synchronizing network using limited mes-
sage length,
• Non-blocking networks.
3.1 Scheduling
Scheduling must be performed in a centralized man-
ner. Any processor must request a communication
line providing the source and destination address, the
length of communication (e.g. in cycles or word to be
transmitted) and the deadline. The sampled requests
are then scheduled using a conflict graph to obtain
a feasible schedule (or not). As shown in (Waldherr
et al., 2013), this problem is NP-Complete, therefore
finding a complete solution is intractable for a large
number of sources, destinations and messages. To
solve this, (Waldherr et al., 2013) shows that several
heuristics exist including a stimulated annealing. In
real-world applications (which are of course not lo-
cated on one die but distributed in an embedded sys-
tem), e.g. 50 nodes (sources and destinations) with
more than 6000 messages and 700 transmit require-
ments are practical applications. To obtain a schedule
for roughly 10000 nodes with 500000 edges within a
conflict graph, a computational time of some 100 ms
to few seconds was required on state-of-the-art-PCs.
This concept actually appears to be usable for pre-
compiled and scheduled applications but fails for dy-
namic approaches as the time for compute new sched-
ules exceeds practical limits.
3.2 Self-synchronizing Network
Another useful approach might be a self-
synchronizing network. In this case, the NoC
uses buffer capabilities in front of each cross-bar-
switch (CBS) to store a complete message. The
buffer size strictly limits the size of a complete
message through the NoC to some bytes, but on the
other side, this approach routes (and schedules) the
network traffic automatically.
The necessary condition for this type of network
communication is that all routing information is avail-
able inside the message itself implying that the rout-
ing information is independent of other communica-
tions. Figure 4 shows a part of the self-synchronizing
NoC. Any incoming message from a microprocessor
or another network part must contain the destination
address, e.g. in the first word. A small finite state
machine related to the CBS will detect the next route
by quickly analyzing the destination address. If the
CBS is already occupied this means that the switch is
currently active and a transmission from its own input
buffer to the following input buffer is performed the
switch might be either used for transmission, if the
following conditions are given:
• The CBS is already in the correct state for the
transmission
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
182

• The following input buffer is not occupied by any
pending or not completed transmission
In the worst case, the message transmission has to
wait until both conditions are given. Finally, if the re-
ceiving unit, e.g. another on-die-microprocessor core,
does not block communication this can still happen
if the communication buffer is still locked the com-
munication time has a finite worst-case value (WCCT,
Worst-Case Communication Time), and the commu-
nication is real-time capable, if this fits to the require-
ments of the application.
Figure 4: Self-synchronizing network using buffer elements
in front of each switch.
This approach has some similarities to self-
synchronizing networks-on-chip, e.g. the mi-
cropipeline approach. Nevertheless, some uncertain-
ties and drawbacks must be solved. The required
hardware resources and the synchronization protocol
are still subject for further research, the computation
of the WCCT might result in unrealistic high values,
and furthermore questions like introducing priorities
and their influence to real-time behavior and the use
of periodic transmissions must be evaluated.
3.3 Non-blocking Networks
The third approach enhances the network itself and
uses a non-blocking network type. Figure 5 shows the
Bene
˘
s network for N = 8 (k = 3). This NoC is based
on the baseline network using two networks, where
the second one holds an inverted sequence of layers
and the inner two layers are melted into one. The
most interesting characteristic of the Bene
˘
s network
is the fact that any connection request can be fulfilled
as long as all destinations are distinct. To achieve this,
more than one route between any two nodes must be
available, and therefore routing is much more compli-
cated and is no longer possible on local base.
The Bene
˘
s network requires a global routing al-
gorithm. Currently the so-called looping-routing is
used. This routing algorithm computes both outer
layer first in parallel and continues this by comput-
ing the next inner layer. The algorithm is complex
Figure 5: Bene
˘
s network for N = 8.
and time-consuming, if the actual required communi-
cations do not show any constraints.
To solve this drawback, pre-configured routings
are used. Pre-configured routing means that the rout-
ing configurations are computed during compile time
and stored in the target’s non-volatile memory. If the
actual configuration shall switch to another, commu-
nication must be finished and the new configuration is
loaded and switches the CBSs accordingly.
The obvious disadvantage of this approach, the
static routing during communication intervals and
therefore inflexibility against dynamically changing
situations, is uncritical as long as the application is
static concerning active processes and threads. This is
fact within the aerospace application domain, there-
fore we assume no restriction from this. If dynamic
routing becomes a necessary condition, another ap-
proach is the separation routing approach, which di-
vides and approximates routes until a solution is
found. Future work will be performed to integrate
this algorithm into hardware without using software
capabilities.
4 FIRST RESULTS AND NEXT
STEPS
As the hardware approach for non-blocking network
was used, it could be shown that the pre-compiled
routing could be integrated and the communication
itself works dependable showing real-time behavior.
This approach simply means that scheduling is still
required in the sense that the requirements of the ap-
plication to communicate between processors is now
mapped to switching between configurations. Figure
6 shows the top-level schematic of a Bene
˘
s network
with N = 8. On the left and on the right side you can
identify the N = 8 input and output structures; these
are realized by 4 cross-bar switches with two inputs
and outputs each.
AppropriateMulti-coreArchitectureforSafety-criticalAerospaceApplications-CertifiableReal-timeSwitchingNetwork
183

Figure 6: Schematic of Bene
˘
s network with N = 8.
Figure 7 shows the Bene
˘
s network with N = 8
with expanded sub-hierarchies to visualize some of
the typical intermediate stages (cf. figure 5) of a
Bene
˘
s network.
Figure 7: Partly expanded schematic for Bene
˘
s network
with N = 8.
Figure 8 illustrates the resource usage of a Bene
˘
s
network with N = 8 on a Xilinx xc3s700an device.
Precisely we have the following data: Number of
Slices: 736 out of 5888 or 12% utilization respec-
tively Number of 4 input LUTs: 1280 out of 11776
or 10% utilization.
Further work will be done to evaluate the other
approaches, specifically the approach using a self-
synchronizing network and the approach of global
routing. For global routing, all approaches are
time-consuming, and we will follow the approach
to map at least one of them into hardware. For
the self-synchronizing network approach on the other
side, proof of real-time capability, specifically of the
WCCT, is pending. Furthermore, both approaches
uses more hardware resources must be quantified in
future.
Figure 8: Place (top) and route (bottom) results for Bene
˘
s
network with N = 8. Device: Xilinx xc3s700an.
5 CONCLUSIONS
In this position paper we have argued for a certifiable
real-time switching network structure for multi-core
architectures. The need for such a specific network
was systematically derived from an analysis of cur-
rently available multi-core platforms and their cor-
responding drawbacks with respect to safety critical
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
184

system. Due to the requirements and regulations valid
in the aerospace domain, the use of multi-core plat-
forms without the possibility of qualification and cer-
tification is not possible.
First results are promising and will be extended
by a more concrete implementation with 4 cores at
the beginning and our advocated network.
REFERENCES
Aust, S. (2013). Ein Echtzeit-Parallelrechner zur Rezentral-
isierung von Steuergerten in Automobilen. PhD the-
sis University of Clausthal, Clausthal-Zellerfeld Ger-
many.
Aust, S. and Richter, H. (October 2012). Real-time proces-
sor interconnection network for fpga-based multipro-
cessor system-on-chip (mpsoc). In 4th International
Conference on Advanced Engineering Computing and
Applications in Sciences; ADVCOMP 2010, Florenz,
Italy.
Aust, S. and Richter, H. (September 2010). Space division
of processing power for feed forward and feed back
control in complex production and packaging machin-
ery. In World Automation Congress; WAC 2010, Kobe,
Japan.
Newman, P. (1988). Fast Packet Switching for Integrated
Services. PhD thesis University of Cambridge, Cam-
bridge, UK.
RTCA (2013). RTCA documents.
http://www.rtca.org/store list.aspl.
Stilkerich, S. C. (May 2013). Multicore systems in the light
of aerospace safety regulations. In 8th MultiCore De-
velopers Conference, San Jose, USA.
Waldherr, S., Knust, S., and Aust, S. (2013). Message
Scheduling for Real-Time Interprocessor Communica-
tion. to be published.
AppropriateMulti-coreArchitectureforSafety-criticalAerospaceApplications-CertifiableReal-timeSwitchingNetwork
185
