
Finding Coherent Regions in PET Images for the Diagnosis of
Alzheimer’s Disease
Helena Aidos, Jo˜ao Duarte and Ana Fred
Instituto de Telecomunicac¸˜oes, Instituto Superior T´ecnico, Lisbon, Portugal
Keywords:
Support Vector Machines, ROI, Feature Extraction, Image Segmentation, Mutual Information.
Abstract:
Alzheimer’s disease is a type of dementia that mainly affects elderly people, with unknown causes and no
effective treatment up to date. The diagnosis of this disease in an earlier stage is crucial to improve patients’
life quality. Current techniques focus on the analysis of neuroimages, like FDG-PET or MRI, to find changes
in the brain activity. While high accuracies can be obtained by combining the analysis of several types of
neuroimages, they are expensive and not always available for medical analysis. Achieving similar results using
only 3-D FDG-PET scans is therefore of huge importance. While directly applying classifiers to the FDG-PET
scan voxel intensities can lead to good prediction accuracies, it results in a problem that suffers from the curse
of dimensionality. This paper thus proposes a methodology to identify regions of interest by segmenting
3-D FDG-PET scans and extracting features that represent each of those regions of interest, reducing the
dimensionality of the space. Experimental results show that the proposed methodology outperforms the one
using voxel intensities despite only a small number of features is needed to achieve that result.
1 INTRODUCTION
One of the most common forms of dementia is
Alzheimer’s disease (AD), a progressive brain dis-
order that has no known cause or cure. It is a dis-
ease that slowly leads to memory loss, confusion, im-
paired judgment, personality changes, disorientation
and the inability to communicate. An early detec-
tion is very important for an effective treatment, espe-
cially in the Mild Cognitive Impairment (MCI) stage,
to slow down the progress of the symptoms and to im-
prove patients’ life quality. MCI is a condition where
a person has mild changes in thinking abilities, but it
does not affect daily life activities. People with MCI
are more likely to develop AD, even though recent
studies suggest that a person with MCI may revert
back to normal cognition on its own (Alzheimer’s As-
sociation, 2013).
Neuroimages allow the identification of brain
changes and have been used for automated diagno-
sis of AD and MCI (Silveira and Marques, 2010; Ye
et al., 2012). Due to the high variability of the pat-
tern of brain degeneration in AD and MCI, the analy-
sis of brain images is a very difficult task. Moreover,
attempts are being made to develop tools to automat-
ically analyze the images and, consequently, diagno-
sis AD and MCI conditions (Morgado et al., 2013;
Ram´ırez et al., 2013).
Most of the techniques developed have focused
on analyzing small parts of the brain like hippocam-
pus (Gerardin et al., 2009) or the gray matter volume
(Fan et al., 2008). However, these techniques have
some limitations by the fact that the brain atrophy af-
fects many and different regions in different stages of
the disease. Therefore, researchers are focusing their
techniques in analyzing the pattern of the entire brain.
However, this leads to the ”curse of dimensionality”
because a brain image, like the fluorodeoxyglucose
positron emission tomography (FDG-PET), contains
thousands of voxels (or features). Dimensionality re-
duction and feature selection techniques are therefore
fundamental for achieving high accuracy predictors
for the diagnosis of Alzheimer’s disease.
Some techniques are based in the segmentation
of the brain into Regions of Interest (ROIs), which
are associated with atrophy caused by the disease.
Then, voxel intensities from each ROI are used as
features (Zhang et al., 2011; Mikhno et al., 2012).
Some other dimensionality reduction techniques from
Machine Learning field (Lopez et al., 2009; Segovia
et al., 2012), and feature selection techniques (Bi-
cacro et al., 2012; Chaves et al., 2009) have been ap-
plied to the diagnosis of AD.
In this paper, we propose a methodology to au-
12
Aidos H., Duarte J. and Fred A..
Finding Coherent Regions in PET Images for the Diagnosis of Alzheimer’s Disease.
DOI: 10.5220/0004802200120018
In Proceedings of the International Conference on Bioimaging (BIOIMAGING-2014), pages 12-18
ISBN: 978-989-758-014-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

tomatically extract features that represent interesting
regions of the brain and, consequently, reducing the
dimensionality of the space. One of the advantages of
this methodology is that brain images, like FDG-PET,
do not need to be pre-processed in order to remove the
background and the scalp. This is due to the choice of
the clustering algorithm, which is a variant of the DB-
SCAN (density-based spatial clustering of applica-
tions with noise) called XMT-DBSCAN (Tran et al.,
2012). Another advantage is that the space we ob-
tain is approximately 100× smaller when compared
to the original one, consisting of voxel intensities.
This happens because each region (cluster) obtained
by the clustering algorithm is represented by a feature,
which is a weighted mean of the voxel intensities of
that region.
This paper is organized as follows: section 2 ex-
plains each step of the proposed methodology and
section 3 presents the dataset used in this paper as
well the results obtained for the proposed method-
ology and for the classification task using the voxel
intensity. Conclusions are drawn in Section 4.
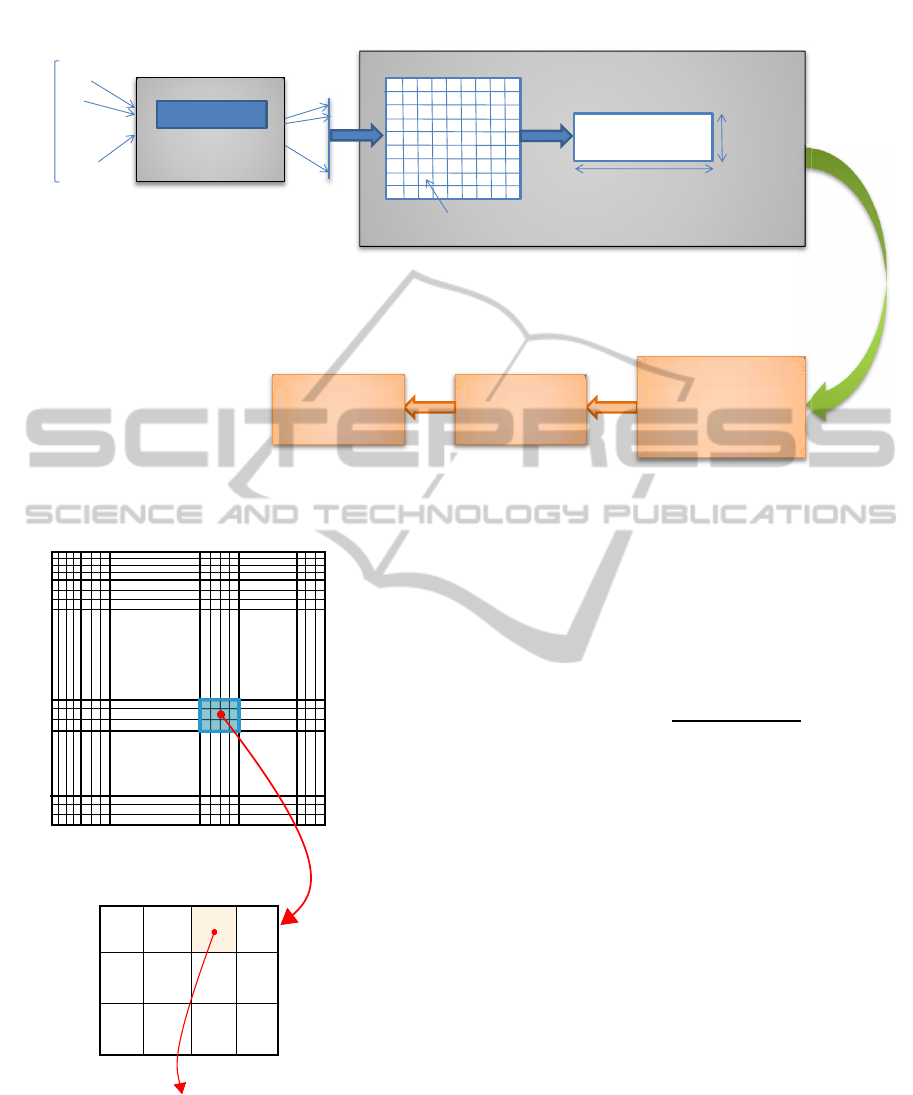
2 THE PROPOSED
METHODOLOGY
In order to analyze the FDG-PET scans for each task:
AD versus CN (Cognitive Normal), MCI versus CN
and AD versus MCI, we propose the methodology
shown in Figure 1. We start by segmenting each 3-D
image (a FDG-PET scan from a subject), followed by
a construction of a probability matrix indicating the
degree of belonging of each voxel to a region found
by the clustering/segmentation algorithm. Then, we
perform a feature extraction step using the voxel in-
tensities and the probability matrix, obtaining a fea-
ture space representation for each problem. Finally,
feature selection is applied and the subjects are clas-
sified, using support vector machines.
2.1 Step 1: Image Segmentation
Over the years, several 3-D segmentation methods
have been developed such as region growing, wa-
tershed, among others (Arbel´aez et al., 2011; Tri-
pathi et al., 2012); watershed algorithm (Beucher and
Lantuejoul, 1979) is the most widely used. How-
ever, watershed tends to over-segment the 3-D images
when the data is dense and non-homogeneous,or gen-
erate under-segmentation results in the case of dense
regions with irregular shapes of objects. Since our
FDG-PET scans are noisy images that have regions
with different sizes, densities and irregular shapes,
we propose to use a version of the DBSCAN algo-
rithm, namely the XMT-DBSCAN (Tran et al., 2012),
to segment the 3-D images.
XMT-DBSCAN is an extension of the original
DBSCAN but has a few differences. Firstly, the local
density of a voxel (a pixel in DBSCAN) is computed
in the sub-window with size ws = (2w + 1) × (2w +
1)×(2w+1) centered in the voxel, instead of the ball
with radius eps. In our methodology, the local density
is computed as
density(v
ijk
) =
∑
all−elements
I
w
v
ijk
⊙ K
w
a
k
, (1)
where ⊙ is the element-wise product of two equally
sized data cubes, K
w
is a cubic Gaussian kernel with
standard deviation equal to ws/(4
p
2log(2)), I
w
v
ijk
is
the sub-window from the intensity image, and a
k
is
the number of non-zero values in K
w
.
The identification of the voxels as core points,
border points and noise is similar to the original
DBSCAN. Another modification to the original DB-
SCAN is in the definition of density-reachable chain
(Ester et al., 1996), which is modified to contain only
core voxels. This means that labeling the border
points is made in a post-processing step, at the end
of the algorithm, when all core points are identified.
2.2 Step 2: Coherence Matrix
After segmenting each 3-D image, we obtain a parti-
tion into regions (clusters) and we need to find some
consensual information for each population (AD, CN
or MCI). In that sense, we construct a block coherence
matrix C, with as many blocks as the squared number
of subjects of a population. The idea is to perform a
pairwise comparison between the partitions obtained
by XMT-DBSCAN for each subject of a population.
Therefore,
C(µ(l, i),µ(p, j)) =
|C
l
i
∩C
p
j
|
q
|C
l
i
| · |C
p
j
|
, (2)
where µ(l, i) is the indexation function for the coher-
ence matrix C, |C
l
i
∩C
p
j
| is the number of voxels be-
longing to both C
l
i
and C
p
j
, with C
l
i
the region/cluster
i from subject l and C
p
j
the region/cluster j from sub-
ject p. The indexation function is given by
µ(l, i) = i+
l−1
∑
j=1
m
j
,
with m
j
the number of clusters in the partition of sub-
ject j, i.e., µ(l, i) gives the index corresponding to
cluster i of subject l, where each partition of a sub-
ject has m
j
clusters. Figure 2 shows an example of a
FindingCoherentRegionsinPETImagesfortheDiagnosisof
Alzheimer'sDisease
13
STEP 1:
Image segmentation
DBSCAN
S
1
S
2
S
M
A(B)
.
.
.
Parameters:
w, j, kernel
FDG-PET from
Population A (B)
.
.
.
Coherence matrix
Coherence matrix between subjects i and j
(values under 50% are discarded)
Degree of belonging
Number of Voxels
K
A(B)
most
coherent
clusters
),(
)(
R
ijk
BA
vP
STEP 4:
Feature Selection
Higher mutual
information
STEP 5:
Classification
Support vector
machines
STEP 3:
Feature Extraction
Feature space of size
(M
A
+M
B
)x(K
A
+K
B
)
obtained from
equation (4)
STEP 2:
Coherence matrix
Figure 1: The proposed methodology.
S
1
S
2
S
M
A
S
1
S
2
A
S
M
...
...
......
...
...
...
...
...
...
...
C
p
1
C
p
2
C
p
4
C
p
3
C
l
1
C
l
2
C
l
3
C( (l,1), (p,3))
S
l
S
p
m
p
clusters
{
m
l
clusters
{
Figure 2: Coherence matrix.
coherence matrix.
The matrix C shows the degree of overlapping of
each pair of clusters. Since we want a region that is
common in most of the subjects, we consider that val-
ues under 50% of overlapping are discarded.
We start by searching the most coherent cluster in
matrix C and obtain a region R corresponding to the
union of all clusters with an overlapping over 50% to
the most coherent cluster found. Inside the region R ,
we compute the probability (for a certain population)
of each voxel belong to R as
P
A
(v
ijk
,R ) =
∑
C
k
∈R
1
{v
ijk
∈C
k
}
∑
C
k
∈R
1
{C
k
∈R }
, (3)
where C
k
is the k-th cluster of region R , 1
{v
ijk
∈C
k
}
is 1
if v
ijk
∈ C
k
, and 0 otherwise; v
ijk
is a voxel in the 3-D
image and A ∈ {AD,CN,MCI}. The numerator of the
previous equation is a count of the number of clusters
in R where the voxel belongs, and the denominator is
just the number of clusters in R . This process is re-
peated until no coherent clusters are left in matrix C.
Therefore, P
A
is K × N matrix, with K the number of
regions and N the number of voxels in the 3-D image.
2.3 Step 3: Feature Extraction
So far we have found regions containing relevant in-
formation for each population. Now we want to dis-
criminate AD vs CN, CN vs MCI and AD vs MCI.
This means that we will construct a feature space for
each of these problems using the voxels intensities
from two populations and the regions found in step
2 corresponding to the same two populations.
Consider that M
A
is the number of subjects from
population A and M
B
the number of subjects from
population B. Also, K
A
and K
B
are the number of
BIOIMAGING2014-InternationalConferenceonBioimaging
14

Population B Population A
R
1
R
2
R
K
A
R
K +K
B
R
K +1
A
R
K +2
A A
... ...
Population A Population B
S
1
S
2
S
M
A
S
M +M
B
S
M +1
A
S
M +2
A A
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
......
...
...
...
...
...
...
F(α(1, population A),β(2, population B))
Figure 3: New feature space representation obtained by fea-
ture extraction.
regions found in step 2 for population A and B, re-
spectively. We want to construct a feature space F
with M
A
+ M
B
samples and dimension K
A
+ K
B
, in
the following way
F(α(p,r),β(q,s)) =
∑
v
ijk
I(v
ijk
∈ S
r
p
) · P
s
(v
ijk
,R
q
)
∑
v
ijk
P
s
(v
ijk
,R
q
)
,
(4)
with r,s ∈ {population A,population B}. I(v
ijk
∈ S
r
p
)
is the intensity of voxel v
ijk
from subject p in popu-
lation r and P
s
(v
ijk
,R
q
) is the probability that voxel
v
ijk
belongs to region R
q
in population s. α(p,r) and
β(q,s) are indexation functions given by
α(p,r) =
p if r = population A
M
A
+ p if r = population B
and
β(q,s) =
q if s = population A
K
A
+ q if s = population B
respectively. α(p,r) is the indexation for subjects and
β(q,s) the indexation for regions, as illustrated in fig-
ure 3.
Equation (4) is equivalent to compute a weighted
mean of the intensity of a subject, where some voxels
contribute more than others, obtaining a feature space
for each classification task.
2.4 Step 4: Feature Selection
Typically, the number of voxels in a FDG-PET image
is very high and some of those voxels are unimportant
for the task in hand. So, it is very important to re-
duce the dimensionality of the space through feature
selection. We use mutual information (MI) to rank the
features and choose the ones with higher value.
Table 1: Clinical and demographic characteristics of each
group. Age and MMSE (Mini Mental State Exam) values
are means (± standard deviations).
Attributes AD MCI CN
Number of subjects 59 59 59
Age 78.26 77.71 77.38
(±6.62) (±6.88) (±4.87)
Sex (% of males) 57.63 67.80 64.41
MMSE 19.60 25.68 29.20
(±5.06) (±2.97) (±0.92)
Consider that x
i
is the i-th element of a vector rep-
resenting a feature x, and y a target value or label. The
MI between the random variable x
i
and y is given by
MI(i) =
∑
x
i
∑
y
P(x
i
,y)log
P(x
i
,y)
P(x
i
)P(y)
. (5)
The probability density functions for MI were esti-
mated through the use of histograms.
2.5 Step 5: Classification
After selecting the most relevant features for each of
the three diagnostic problems, we classify subjects
through the support vector machine (SVM) algorithm
with a linear kernel (Cortes and Vapnik, 1995). The
SVM algorithm is a popular classifier in several ar-
eas, including diagnosis of neurological diseases like
Alzheimer.
3 EXPERIMENTS
3.1 Dataset
In this study, we used FDG-PET images for AD, MCI
and CN subjects, retrieved from the ADNI database.
The subjects were chosen to obey a certain criteria:
the Clinical Dementia Rating (CDR) should be 0.5 or
higher for AD patients, 0.5 for MCI patients and 0
for normal controls. This selection results in a dataset
composed by 59, 142 and 84 subjects for AD, MCI
and CN, respectively. Since our task is classification
using the SVM algorithm, we decided to balanced the
classes by using a random sub-sampling technique.
Thus, 59 subjects from each MCI and CN groups
were selected randomly. Table 1 summarizes some
clinical and demographic information in each group.
The FDG-PET images have been pre-processed
to minimize differences between images: each image
was co-registered, averaged, reoriented (the anterior-
posterior axis of each subject was parallel to the AC-
PC line), normalized in its intensity, and smoothed
FindingCoherentRegionsinPETImagesfortheDiagnosisof
Alzheimer'sDisease
15

to uniform standardized resolution. A more detailed
description of the pre-processing is available in the
ADNI project webpage
1
.
The complete 64 × 64 × 30 FDG-PET images
were used, which means that no background or extra-
cranial voxels were excluded. We left those voxels
because the image segmentation step will automati-
cally discard them and only the relevant voxels will
be labeled.
3.2 Experimental Setup
The FDG-PET image of the brain of each individual
needs to be segmented with XMT-DBSCAN, the seg-
mentation algorithm proposed in the methodology. In
section 2, we state that XMT-DBSCAN has two pa-
rameters: window size w and ϕ which is a threshold
to identify core and border voxels (see (Ester et al.,
1996) for more details). We set w to 2 and 3, and ϕ
takes values from {0.3,0.5, 0.7}. The first part of our
experiments consists in the analysis of the influence
of these parameters in the results.
In the feature selection step we discretized the
probability density functions through histograms with
8 bins and, after ranking the features according to the
MI, we choose the ones with higher value. We con-
sider several number of features selected by the MI,
according to table 2.
The final step of the proposed methodology
consists in classifying subjects using a linear SVM.
We set the cost of misclassification in SVM as
{2
−16
,2
−14
,2
−12
,2
−10
,2
−8
,2
−6
,2
−4
,2
−2
,2
0
,2
2
,2
4
}
and performed a 20 × 10 nested cross-validation
procedure (Varma and Simon, 2006).
We compare the proposed methodology with the
one consisting of the voxel intensities, called MI-
SVM. In that strategy, we first need to pre-process
the FDG-PET images to remove the background and
the scalp. Afterwards, steps 4 and 5 of the proposed
methodologyare applied. The number of selected fea-
tures used to classify the subjects are shown in table 2.
3.3 Results
Firstly, we want to study the influence of the two pa-
rameters (w and ϕ) of the image segmentation step
in the classifier. Figure 4 shows the accuracy of the
classifier for the considered parameters values.
In AD vs CN problem we see that the best result
is higher than 89% and it is given when we consider
a ϕ = 0.7 and w = 3 in the XMT-DBSCAN algo-
rithm. Also, this best value is obtained with a lower
1
http://adni.loni.usc.edu/methods/pet-analysis/
pre-processing/
90%
88%
86%
84%
82%
0 200 400 600 800 1000 1200 1400 1600
Number of features
Accuracy
w=2
0.3 0.5 0.7
=
0.3 0.5
w=3
(a) AD vs CN
w=2
0.3 0.5 0.7
=
0.3 0.5
w=3
0 200 400 600 800 1000 1200 1400 1600
Number of features
78%
Accuracy
76%
74%
72%
70%
68%
66%
64%
(b) MCI vs CN
72%
70%
68%
66%
64%
Accuracy
0 200 400 600 800 1000 1200 1400 1600
Number of features
w=2
0.3 0.5 0.7
=
0.3 0.5
w=3
(c) AD vs MCI
Figure 4: Average accuracy of 20 × 10 nested cross-
validation of the proposed methodology for several different
parameters consider in the image segmentation step.
number of features, around 250 features, which cor-
responds to the all space for those parameters. More-
over, with w = 2 and ϕ = 0.3 we have the lowest ac-
curacy for different number of features and the maxi-
mum is when we have a space with 1000 features with
an accuracy of approximately 87%.
In MCI vs CN problem the worst result is for
w = 3 and ϕ = 0.7, opposite of what we see in AD
vs CN. Now the best result is higher than 76% and
it is given by w = 2 and ϕ = 0.5, which means that
we need a small sub-window to distinguish between
MCI subjects and CN subjects. Again, we only need
around 250 features for the better accuracy.
In the case of AD vs MCI, the worst results are for
w = 3 and ϕ = 0.3 and it is approximately 64%, but
the best result is obtained using only 50 features and
a small window and density in the XMT-DBSCAN
algorithm (w = 2 and ϕ = 0.3). For those parameters,
we notice that if we increase the number of features,
the accuracy decreases.
The two parameters we are discussing affects not
only the number of features of the space, but also the
BIOIMAGING2014-InternationalConferenceonBioimaging
16
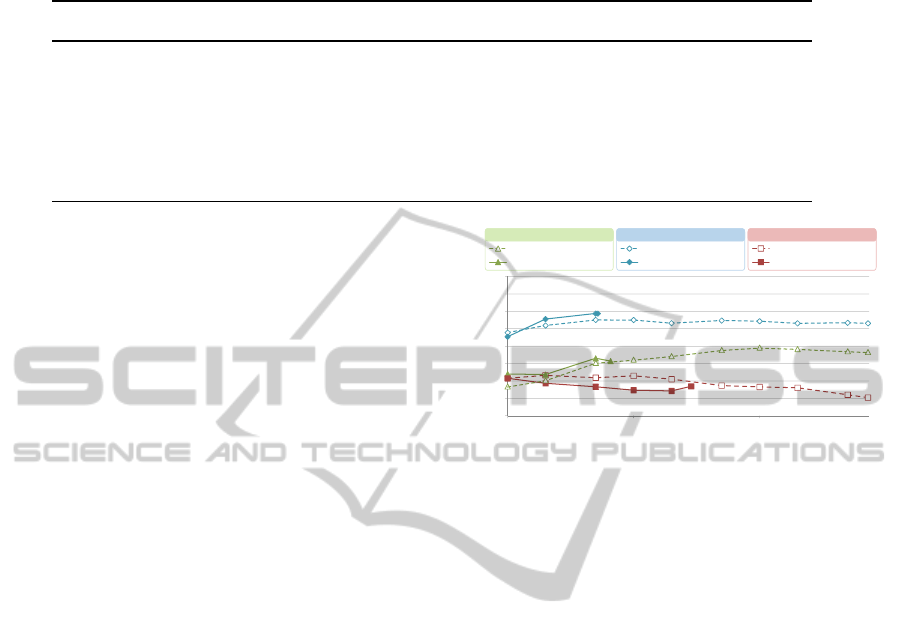
Table 2: Number of features used to tested the feature selection step. The maximum number of features used corresponds to
the complete feature space, as stated by columns 2-4, depending on the problem.
Parameter Max. features
Space AD vs CN MCI vs CN AD vs MCI Number of selected features
w = 2,ϕ = 0.3 1436 1413 1433 50, 100, 250, 500, 1000, Max. features
w = 2,ϕ = 0.5 1037 1057 1050 50, 100, 250, 500, 1000, Max. features
w = 3,ϕ = 0.3 476 476 502 50, 100, 250, Max. features
w = 3,ϕ = 0.5 332 328 342 50, 100, 250, Max. features
w = 3,ϕ = 0.7 260 284 268 50, 100, 250, Max. features
voxel intensity 36209 50, 100, 250, 500, 1000, 2500,
5000, 10000, 25000, Max. features
accuracy of the classifier. From figure 4, we notice
that for distinguish between AD and CN subjects we
need to create large regions with high density (in-
tensity). This makes sense, since FDG-PET scans
of the brain measures the glucose used, and patients
with Alzheimer’s disease had a big decrease in brain
metabolism of glucose compared to a normal patient.
Moreover, if we want to distinguish between MCI pa-
tients and CN or AD patients, we need to decrease the
size of clusters, which leads to an increase of number
of regions/features and look for differences in more
specific locations of the brain. This happens because
MCI is a transition stage: some MCI patients may
convert to Alzheimer others just remain stable over
time or even remit.
Figure 5 compares the best result obtained with
the proposed methodology for each problem with the
methodology using the voxel intensity. For AD vs
CN our methodologyoutperformsMI-SVM with only
a few features. Even if we use the all space, MI-
SVM is always worst than our methodology. Some-
thing similar happens for MCI vs CN, using few fea-
tures (around 250 features) our methodology outper-
forms MI-SVM. However, if we increase the num-
ber of features until 5000, MI-SVM can predict better
than our methodology. In AD vs MCI, our best per-
formance is for the lowest number of features (50 fea-
tures) and it is comparable to MI-SVM; after that we
perform worst than MI-SVM. Notice that, MI-SVM
remains almost constant until 1000 features and then
the performance decreases. Moreover, our method-
ology starts to increase after the 1000 features. This
may indicate that we need more features to discrimi-
nate MCI subjects from AD subjects, which means we
need to decrease the size of the regions corresponding
to a decreasing in the parameters w and/or ϕ.
4 CONCLUSIONS
This paper proposes a methodology to find interesting
regions in the brain to efficiently discriminate subjects
AD vs CN
MCI vs CN
AD vs MCI
MCI vs CN
Voxels selected by MI
Proposed (w=3, =0.5)
AD vs CN
Voxels selected by MI
Proposed (w=3, =0.7)
AD vs MCI
Voxels selected by MI
Proposed (w=2, =0.3)
50
Number of features
(log scale)
500 5000
100%
Accuracy
95%
90%
85%
80%
75%
70%
65%
60%
Figure 5: Average accuracy of 20 × 10 nested cross-
validation of the best curve from each problem in figure 4
compared to voxels intensities chosen through mutual infor-
mation and classified using SVM.
with Alzheimer’s disease from the ones with mild
cognitive impairment and from normal ones. The pro-
posed methodology has several stages: starts with a
segmentation of the FDG-PET image, followed by a
grouping of clusters to form regions with relevant in-
formation. Those regions form a feature space and
the most important ones are selected by ranking their
mutual information with the target output. Finally a
classifier is used to identify the subjects.
For number of features under 100, the proposed
methodology outperforms another strategy consisting
in ranking the mutual information of features with the
target output, where the features are only the vox-
els intensities. Moreover, by comparing using all
the space in both strategies, our methodology out-
performs the other strategy, using a small number of
features. Another advantage of this methodology is
that the complete FDG-PET image was used, since
the segmentation algorithm can identify background
and extracranial voxels, which means we do not need
to pre-process the images to remove those voxels.
ACKNOWLEDGEMENTS
This work was supported by the Portuguese Founda-
tion for Science and Technology grants PTDC/SAU-
FindingCoherentRegionsinPETImagesfortheDiagnosisof
Alzheimer'sDisease
17

ENB/114606/2009 and PTDC/EEI-SII/2312/2012.
Data used in the preparation of this article were ob-
tained from the Alzheimer’s Disease Neuroimaging
Initiative (ADNI) database.
REFERENCES
Arbel´aez, P., Maire, M., Fowlkes, C., and Malik, J. (2011).
Contour detection and hierarchical image segmenta-
tion. IEEE Trans. on Pattern Analysis and Machine
Intelligence, 33(5):898–916.
Association, A. (2013). 2013 Alzheimer’s disease facts and
figures. Alzheimer’s & Dementia: The Journal of the
Alzheimer’s Association, 9(2):208–245.
Beucher, S. and Lantuejoul, C. (1979). Use of watersheds in
contour detection. In Int. Work. on Image Processing:
Real-time Edge and Motion Detection/Estimation.
Bicacro, E., Silveira, M., Marques, J. S., and Costa, D. C.
(2012). 3D image-based diagnosis of Alzheimer’s dis-
ease: bringing medical vision into feature selection. In
Int. Symp. on Biomedical Imaging, pages 134–137.
Chaves, R., Ramirez, J., Gorriz, J. M., Lopez, M., Alvarez,
I., Salas-Gonzalez, D., Segovia, F., and Padilla, P.
(2009). SPECT image classification based on NMSE
feature correlation weighting and SVM. In IEEE Nu-
clear Science Symp. Conf. Record, pages 2715–2710.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20:273–297.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In Int. Conf. on
Knowledge Discovery and Data Mining, pages 226–
231.
Fan, Y., Batmanghelich, N., Clark, C., and Davatzikos, C.
(2008). Spatial patterns of brain atrophy in MCI pa-
tients, identified via high-dimensional pattern classi-
fication, predict subsequent cognitive decline. Neu-
roImage, 39:1731–1743.
Gerardin, E., Ch´etelat, G., Chupin, M., Cuingnet, R., Des-
granges, B., Kim, H.-S., Niethammer, M., Dubois, B.,
Leh´ericy, S., Garnero, L., Eustache, F., and Colliot, O.
(2009). Multidimensional classification of hippocam-
pal shape features discriminates Alzheimer’s disease
and mild cognitive impairment from normal aging.
NeuroImage, 47(4):1476–1486.
Lopez, M., Ramirez, J., Gorriz, J. M., Salas-Gonzalez, D.,
Alvarez, I., Segovia, F., and Chaves, R. (2009). Multi-
variate approaches for Alzheimer’s disease diagnosis
using bayesian classifiers. In IEEE Nuclear Science
Symp. Conf. Record, pages 3190–3193.
Mikhno, A., Nuevo, P. M., Devanand, D. P., Parsey, R. V.,
and Laine, A. F. (2012). Multimodal classification
of dementia using functional data, anatomical features
and 3D invariant shape descriptors. In Int. Symp. on
Biomedical Imaging, pages 606–609.
Morgado, P., Silveira, M., and Marques, J. S. (2013). Effi-
cient selection of non-redundant features for the diag-
nosis of Alzheimer’s disease. In Int. Symp. on Biomed-
ical Imaging, pages 640–643.
Ram´ırez, J., G´orriz, J. M., Salas-Gonzalez, D., Romero,
A., L´opez, M.,
´
Alvarez, I., and G´omez-R´ıo, M.
(2013). Computer-aided diagnosis of Alzheimer’s
type dementia combining support vector machines
and discriminant set of features. Information Sciences,
237:59–72.
Segovia, F., G´orriz, J. M., Ram´ırez, J., Salas-Gonzalez, D.,
´
Alvarez, I., L´opez, M., and Chaves, R. (2012). A
comparative study of feature extraction methods for
the diagnosis of Alzheimer’s disease using the ADNI
database. Neurocomputing, 75:64–71.
Silveira, M. and Marques, J. S. (2010). Boosting Alzheimer
disease diagnosis using PET images. In Int. Conf. on
Pattern Recognition, pages 2556–2559.
Tran, T. N., Nguyen, T. T., Willemsz, T. A., van Kessel,
G., Frijlink, H. W., and van der Voort Maarschalk, K.
(2012). A density-based segmentation for 3D images,
an application for X-ray micro-tomography. Analytica
Chimica Acta, 725:14–21.
Tripathi, S., Kumar, K., Singh, B. K., and Singh, R. P.
(2012). Image segmentation: a review. Int. Jour-
nal of Computer Science and Management Research,
1(4):838–843.
Varma, S. and Simon, R. (2006). Bias in error estimation
when using cross-validation for model selection. BMC
Bioinformatics, 7(91).
Ye, J., Farnum, M., Yang, E., Verbeeck, R., Lobanov,
V., Raghavan, N., Novak, G., DiBernardo, A., and
Narayan, V. (2012). Sparse learning and stability se-
lection for predicting MCI to AD conversion using
baseline ADNI data. BMC Neurology, 12(46).
Zhang, D., Wang, Y., Zhou, L., Yuan, H., and Shen, D.
(2011). Multimodal classification of Alzheimer’s dis-
ease and mild cognitive impairment. NeuroImage,
55(3):856–867.
BIOIMAGING2014-InternationalConferenceonBioimaging
18
