
Development of a Haptic Interface for Safe Human Robot Collaboration
Ioannis Iossifidis
IComputer Science Insitute, Ruhr West University of Applied Sciences, 45470 M
¨
ulheim an der Ruhr, Germany
Keywords:
Haptic Interface, Artificial Skin, Direct Physical Interaction, Safe Collaboration.
Abstract:
In the context of the increasing number of collaborative workplaces in industrial environments, where humans
and robots sharing the same workplace, safety and intuitive interaction is a prerequisite. This means, that the
robot can (1) have contact with his own body and the surrounding objects, (2) the motion of the robot can be
corrected online by the human user just by touching his artificial skin or (3) interrupt the action in dangerous
situations. In the current work we introduce a haptic interface (artificial skin) which is utilized to cover the
arms of an anthropomorphic robotic assistant. The touched induced input of the artificial skin is interpreted
and fed into the motor control algorithm to generate the desired motion and to avoid harm for human and
machine.
1 INTRODUCTION
Modern production processes require a flexible use of
the available resources and can not be covered effi-
ciently by conventional rigid automation strategies.
Work places in which man and machine collaborate
sharing the same workspace in order to accomplish
all of the required production steps contribute to a
flexible design of production situation or a fast re-
arrangement at low costs. This implies that prepro-
grammed rigid machines should be replaced by au-
tonomous robotic assistant, which can be instructed
intuitively and used in a wide variety of production
scenarios.
Precondition for the use of such systems is the
warranty of the safety of the involved employees. The
security-related situation are characterized by the oc-
currence of intentional or unintentional contacts be-
tween man and machine. Both need to be allowed
but without the danger of harming humans or destroy-
ing the machines. We define this kind of interaction
as direct physical interaction by means of haptic and
other force/torque related sensors. In consequence
the two strongly linked aspects of physical interaction
and safety have to be tackled together by the design of
appropriate haptic sensors, the context sensitive inter-
operation of contact forces and the control of acceler-
ations and velocities of the manipulators.
In this work we introduce a haptic sensor provid-
ing the functionality of an artificial skin, detecting and
measuring contact forces and it’s position. The con-
tact forces are interpreted and the sensorial output is
fed into the motion planning of the robotic arm. In
order to handle motion constraints during the manip-
ulation task the geometric structure, described by the
closed form solution of the invers kinematics, of the
redundant robot arm is exploited.
In the following we describe the haptic sensor in
detail and sketch the closed form solution of the invers
kinematics of the robot arm in order to clarify how
contact forces are mapped to the arm motion. Finally
we describe the implementation and the experimen-
tal results in simulation and on the anthropomorphic
robot Cora (Iossifidis et al., 2002).
2 TARGET SYSTEM
2.1 The Artificial Skin
The artificial skin, invented by the SIEMENS
robotics group, is based on a conductive foam, with
the main characteristic of changing conductivity prop-
erty when pressure is applied. The changing resistant
of the foam is utilized to measure the extend of the ap-
plied pressure and to design a sensor which can cover
arbitrary bodies in order to provide a touch sensitive
skin.
The sensor consists of two layers (two pads) of the
foam, each of equipped with two parallel electrodes.
The pads are arranged such that the electrodes are or-
61
Iossifidis I..
Development of a Haptic Interface for Safe Human Roobt Collaboration.
DOI: 10.5220/0004803400610066
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages 61-66
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Anthropomorphic robot CORA.
thogonal in order to calculate the position of the pres-
sure point of the associated pressure measure.
The electrodes are connected to a sensor board
equipped with A/D converters and a micro controller.
The electrodes of the upper pad are connected to 5 V
(one electrode to ground the other to 5 V) – if pres-
sure is applied the voltage drops according to the pres-
sure point. Both electrodes of the lower layer are con-
nected to the micro controller, who generates a peri-
odically varying voltage between 0 V and 5 V.
As soon a force is applied to the upper layer, the
voltage of the lower layer tuned to the voltage of the
upper layer according to the position of the pressure
point. The read out of the complete unit provides us
with a measure of the applied force and the position
of the pressure point.
We have covered two of CORA’s arm-modules
with the artificial skin mounted on a cylindric silicon
cuff (see figure 2). The advantage of the cylindric
cuff is that the vector valued contact force is obtain
directly from the scalar valued pressure measure. The
direction of the contact force defines the motion di-
rection of the related limb.
2.2 Robot CORA
CORA’s body consists of a redundant seven DoF ma-
nipulator connected to a one DoF trunk which is fixed
on the edge of a table (see figure 1). CORA can ex-
ploit the redundant eight DoF of the arm-trunk con-
figuration that guarantees a high degree of flexibil-
ity with respect to manipulation tasks under exter-
Figure 2: The figure depicts the cylindric cuffs with the ar-
tificial skin which cover the squared module on the upper
arm (left) and the fore arm (right).
nal constraints. Grasping, for instance, is possible
in the whole workspace choosing different arm pos-
tures without the necessity of changing the position
or orientation of the end-effector. By turning the trunk
joint, the robot can also change its configuration from
right- to left-handed. The sensor equipment and the
configuration of the joints in CORA’s body and ma-
nipulator arm are anthropomorphic, which means that
they are structurally similar to the human body.
Two of CORA’s arm-modules are covered with the
artificial skin mounted on a cylindric silicon cuff (see
figure 2). The advantage of the cylindric cuff is that
a scalar pressure value can be interpreted directly as
a force vector perpendicular to the cylinder’s surface
defining the direction in which the limb should be
moved (for more details see (Iossifidis et al., 2002)).
2.3 Kinematics
2.3.1 Initial Configuration
The sketched structure models (in correspondence to
humans) a one degree of freedom trunk, a one degree
of freedom shoulder elevation/depression with an at-
tached seven degree of freedom arm. The arm consist-
ing of a rotating trunk, spherical shoulder and wrist
joints, and an elbow joint, for a total of nine degrees
of freedom. The reference configuration is show in
Figure 3.
θ
1
x
y
T
θ
3
q
3
θ
5
q
5
θ
7
q
7
θ
2
q
2
θ
4
q
4
θ
6
q
6
θ
8
q
8
l
0
l
1
l
2
l
3
l
4
l
5
l
6
l
7
l
8
Base Shoulder Elbow Hand
EEF
z
q
1
S
Figure 3: A total of eight revolute joints are ordered along
the effector to simulate a human arm with trunk, shoulder,
elbow and wrist.
The manipulator is composed of a series of roll
and pitch joints. The combination of a roll-pitch-roll-
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
62

joint is functionally equivalent to a spherical three
DoF joint like the human shoulder or wrist. Similar
to the example above, the twists are determined as
ω
1
= ω
3
= ω
5
= ω
7
=
0
0
1
, ω
2
= ω
4
= ω
6
= ω
8
=
0
1
0
.
Support points can be chosen as
q
i
=
0
∑
i−1
k=1
l
k
0
for i = 1,3,5,7,
and
q
i
=
0
∑
i−1
k=1
l
k
l
0
for i = 2,4,6,8.
This yields the twist coordinates
ξ
1
=
0
0
0
0
0
1
, ξ
3
=
l
1
+ l
2
0
0
0
0
1
, ξ
4
=
l
1
+ l
2
+ l
3
+ l
4
0
0
0
0
1
,
ξ
7
=
l
1
+ l
2
+ l
3
+ l
4
+ l
5
+ l
6
0
0
0
0
1
, ξ
2,4,6,8
=
l
0
0
0
0
0
1
.
The transformation between the base and end-effector
coordinate frames in reference configuration is
g
st
(0) =
I
0
∑
9
i=1
l
i
l
0
0 1
.
2.3.2 Forward Kinematics
The forward kinematics is calculated as the product of
exponential. On the basis of the simple ways of repre-
senting and calculating rigid transformations (for de-
tailed description see (Murray et al., 1994)), we can
move on to describe the transformation to the end ef-
fector of an open chain manipulator, that is, a chain
of n joints. For each joint, we define a joint twist ξ
i
that models the motion of the subsequent part of the
robot.
Let g
st
(0) be the transformation between the base
frame S of the manipulator and the end effector, or
tool frame T in the reference configuration, that is,
when all joint angles
1
θ
1
,...,θ
n
are set to zero.
1
By abusive convention, we refer to the amount of trans-
lation θ
k
of a prismatic joint k as angle, too, in order to
prevent cluttering up our language.
b
x
B
z
sh
rsh
q
u
α Elbow Redundancy Angle
q
f
q
m
q
h
q
g
q
ee f
R
q
w
b
z
B
b
y
B
y
sh
x
sh
β Trunk Redundancy Angle
Figure 4: The figure depicts the kinematical structure and
the associated coordinate systems of an multi redundant
nine degree of freedom arm. α denotes the elbow angle,
β denotes the trunk angle and γ the shoulder angle.
Now we want to know what happens to the end ef-
fector after we apply a rigid transformation by moving
a joint. Starting at the base, we get to the end effector
via g
st
(0), which we then move by applying the rigid
transformation e
b
ξ
i
θ
i
. Combining these two transfor-
mation in the right order, we get
g
st
(θ) = e
b
ξ
i
θ
i
g
st
(0).
Here g
st
(θ) maps the center of the base frame to the
position of the end effector in the new configuration
with θ
i
6= 0. Thinking the other way round, it re-
turns the S-coordinates of a point that we specify in
T -coordinates. So if we specify “0”, we refer to the
position of the end effector in the frame T centered at
that point. Applying g
st
(θ) returns the coordinates of
that point in frame S, centered at the base. Thus, we
can think of g
st
(θ) as enabling us to specify a point
in a moving frame T , and get back its position in the
motionless frame S.
To do the same for a configuration in which sev-
eral joints have moved, i.e. θ
i
6= 0 for more than one i,
we just have to apply the appropriate transformation
in the right order. Conceptually speaking, we start at
the end effector and go up the joints along the manip-
ulator till we reach the base, moving each joint by the
appropriate angle θ
i
on the way. This yields
g
st
(θ) = e
b
ξ
1
θ
1
·· ·e
b
ξ
n
θ
n
g
st
(0) (1)
as the coordinate transformation from T to S in con-
figuration θ = (θ
1
,. ..,θ
n
).
Equation (1) is called the product of exponentials
formula for the manipulator forward kinematics.
2.3.3 Closed Form Solution
For the solution of the overall system we assume that
the shoulder is positioned due to the boundary con-
dition determined by the object to be manipulated,
like turning shoulder towards the object to extend it’s
workspace (distances to objects greater the the length
of the arm) or to position the shoulder to an orienta-
tion that is orthogonal to the target direction (optimal
DevelopmentofaHapticInterfaceforSafeHumanRoobtCollaboration
63
grasping position). The shoulder elevation/depression
is utilized to satisfy additional constraints, like the
avoidance of undesired configurations.
Given the shoulder position, which is determined
by the trunk angle and the shoulder angle, the inverse
kinematic mapping of the seven degree of freedom
has to be derived with respect to shoulder coordinate
system.
In the following we derive first the inverse kine-
matics of the seven degree of freedom, exploiting it’s
geometric properties, and describe how the null space
motion can be utilized to satisfy constraints like ob-
stacle avoidance and joint limits.
Inverse Kinematics. Based on the work of (Kreutz-
Delgado et al., 1990) and (Hollerbach, 1984) the in-
verse kinematics problem for the eight degrees of
freedom manipulator is solved in closed form. In the
following derivation we denote the trunk angle with β
(correspond to θ
1
in the initial configuration in figure
3).
We assume that the end effector position and hand
orientation is determined by the object to be grasped
and that the trunk angle β
will be choosen due to the boundary conditions
and costraints of the given task. First we transform the
given end effector position to the shoulder coordinate
system by:
q
0
ee f
= T
S
sh
q
ee f
with
T
S
sh
=
1 0 0 0
0 1 0 −(l
2
+ l
1
)
0 0 1 −l
0
0 0 0 1
cos(−θ
1
) − sin(−θ
1
) 0 0
sin(−θ
1
) cos(−θ
1
) 0 0
0 0 1 0
0 0 0 1
beeing the homogeneous transformation.
Given the hand orientation θ
h
(elevation) and φ
h
(azimuth) and the tool point q
0
ee f
, the vector q
h
from
the wrist to the hand reference tool-point (Fig. 4) is
determined as
q
h
= R
z
(φ
h
)R
y
(θ
h
)
b
e
y
l
h
(2)
where R
x
, R
z
denote rotation matrices around the z-
and y-axes and l
h
denotes the segment length.
The redundant degree of freedom is defined by the
redundancy circle, the center
q
m
=
|
q
u
|
2
−
q
f
2
+
|
q
w
|
2
2
|
q
w
|
2
q
w
(3)
of which lies on a ray pointing from the shoulder to
the wrist joint. The spatial position of the elbow lies
on this circle of radius r, with
r =
v
u
u
t
|
q
u
|
2
−
|
q
u
|
2
−
q
f
2
+
|
q
w
|
2
2
|
q
w
|
!
2
(4)
Expressing the wrist vector, q
w
, through two angles,
φ
w
and θ
w
, the elbow position can be written as
q
u
= (R
x
(φ
w
)R
z
(θ
w
)R
x
(α) ˆe
y
)r + q
m
(5)
where R
x
and R
z
are rotation matrices around the x-
and the z-axis and the redundancy angle α character-
izes the position of the elbow on the redundancy circle
(Fig. 4). If α is specified, all limb vectors are known.
A straightforward solution of the inverse kinematics
determines the joint angles. ,θ
2
,θ
3
,θ
4
,θ
5
,θ
6
,θ
7
,θ
8
(for details see (Iossifidis, 2013)).
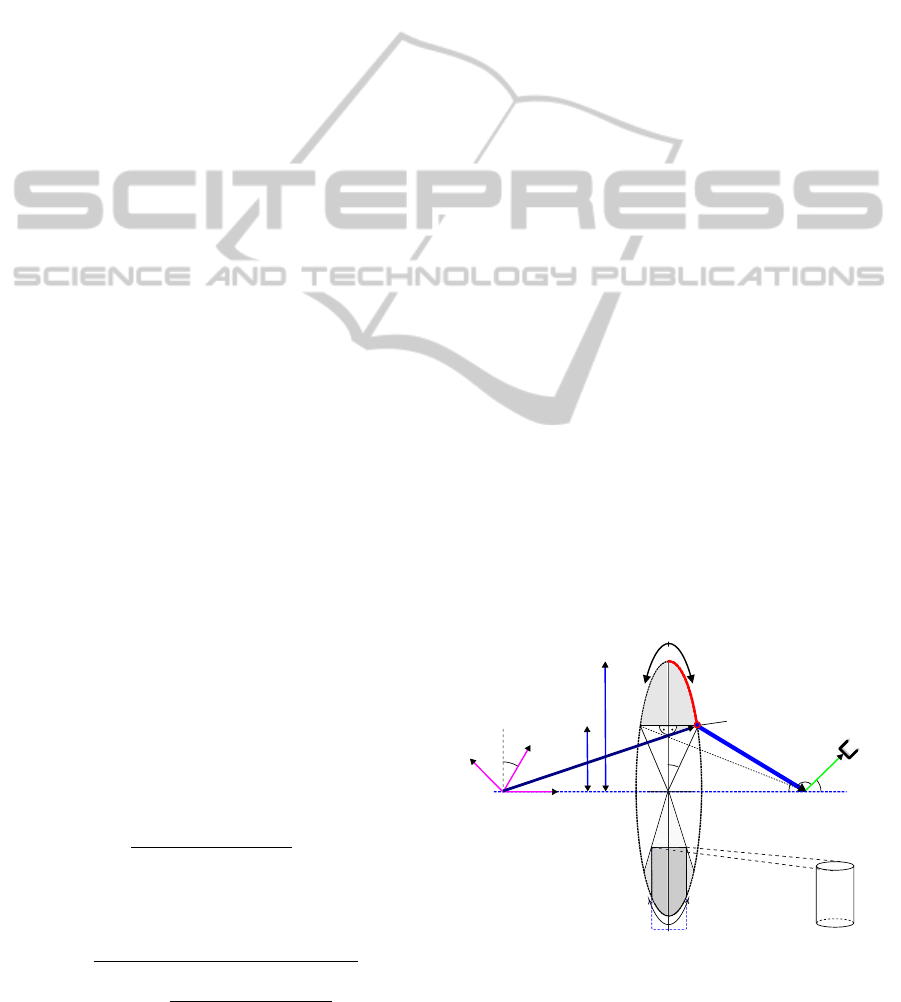
Constraints for the Redundancy Circle. The re-
dundancy angle α spans all redundant arm configura-
tions consistent with the same tool position and ori-
entation. The rate of change of the redundancy an-
gle generates self-motion, which can be used to ac-
commodate the two additional constraints of obsta-
cle avoidance for the upper arm and joint limits at the
wrist. To do that, we must compute which sectors on
the redundancy circle is prohibited forbidden by these
constraints.
Any obstacle o
i
, that reaches up to the elbow, de-
fines a to-be-avoided segment on the redundancy cir-
cle centered on κ
i
and with an angular range of σ
i
(see
Fig. 5) Transforming limitations of joint angle range
into constraints on the redundancy circle is more com-
plicated. The most important joint angle limitation
concerns the wrist, where the lower arm and the hand
are spatially aligned. The angle µ between the hand
q
h
and the forearm q
f
must be larger than π/2, which
is true as long as
−(π − µ) ≤ θ
8
≤ π − µ. (6)
Fig. 5 illustrates that this can be used to compute the
corresponding allowed sector on the redundancy cir-
cle.
κ
α
q
h
q
f
µ
ψ
φ
κ
R
h
r
δ
δ
o
b
x
B
b
y
B
b
z
B
κ
obs
forearm
obstacle
upper arm
elbow position
Figure 5: Geometrical construction to avoid joint configu-
rations at the wrist and an obstacle reaching into the redun-
dancy circle defines a to-be-avoided angular segment of that
circle.
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
64

Figure 6: Null space motion of the elbow while the end effector is moving towards the target.
To do that, define a coordinate system the z
0
-axis
of which is aligned with the shoulder-wrist-axis of the
robot arm. If φ
w
and θ
w
describe the azimuth and ele-
vation of the wrist, then the transformed hand vector,
q
0
h
is:
q
0
h
= R
−θ
w
y
R
−φ
w
z
q
h
(7)
After the transformation, the redundancy circle lies
in a plane parallel to the x
0
y
0
-plane, so that we may
project q
0
h
onto that plane to obtain:
κ = arctan(q
y
h
0
,q
x
h
0
) (8)
as the center of the prohibited sector of the redun-
dancy circle. The angular extent of the prohibited re-
gion κ ± δ follows from equation 6:
δ = arccos(h
r
/r) (9)
where h
r
, ψ, c and φ are auxiliary quantities, which
can be derived from figure 5:
h
r
= c · tan(ψ) (10)
c = |q
w
| − |q
m
| (11)
ψ = π −(µ + φ) (12)
φ = arccos
q
z
h
0
/
q
h
0
. (13)
The obstacle induced prohibited region on the re-
dundancy cycle is calculated analogous, with κ
o
as
the center of the prohibited region and δ
o
as it’s ex-
tend (figure 5).
3 IMPLEMENTATION AND
RESULTS
In the previous section we described the design of the
target system and the closed form solution for the in-
verse kinematics which is the mathematical basis for
the incorporation of the contact forces measured by
the artificial skin. Whereby forces detected by the
artificial skin around the upper arm is interpreted as
forces on the elbow and those detected by the artifi-
cial skin around the fore arm as forces on the wrist.
The input of the artificial skin around the upper
arm generate a null space motion of the 7-degree-of-
freedom arm (motion of the elbow along redundancy
cycle (see 4) ). This motion does not affect the end
effector position and it’s orientation and is used to sat-
isfy motion constrained. Forces detected by the arti-
ficial skin associated with the wrist is used to move
the end effector by the human operator to the desired
direction during a collaborative task (figure 8).
Goal directed trajectories for the end effector in
the following experiments are generated by means
of the attractor dynamics approach described in (Ios-
sifidis and Sch
¨
oner, 2004; Iossifidis and Sch
¨
oner,
2006).
For the demonstration of performance of the sys-
tem, we conducted two experiments. In the first ex-
periment (figure 6) we demonstrate how null space
motion of the robot arm is initiated while the end ef-
fector is moving towards a target without aborting it’s
motion, end effector position or orientation. In fig-
ure 7 the contact force measured by the artificial skin
around the wrist initiates an arm motion in the direc-
tion of the applied force. The human intuitively make
use of the haptic interface in order to move the robot
arm to the desired position.
In the second experiment a human user intervene
in order to support the robot to avoid a collision with
the obstacle that has not been detected by the vision
sensor. In Fig. 8 A the robot arm starts its trajectory
towards the small object. To avoid a collision between
the elbow and an obstacle that has not been detected
by the vision sensor, the human operator touches the
skin on the upper cuff of the robot’s arm ( B - C ), in
order to force the robot to lift its elbow. The system
detects the force, determines its magnitude and cal-
Figure 7: Human operator pushes the wrist of the robot to
free the workspace.
DevelopmentofaHapticInterfaceforSafeHumanRoobtCollaboration
65

A B
C D
Figure 8: The human operator initiate a motion of the elbow
upward by touching the skin and helps the robot to avoid a
collision with the obstacle.
culates the force-direction with respect to the current
arm posture. On the basis of this estimate the robot
starts ( B ) its elbow-movement in the direction of the
detected force. In A - D the robot moves its elbow
without changing the intended trajectory of the end-
effector. In D the robot completes its trajectory and
grasps the object.
4 CONCLUSIONS
The presented work addressed and clarify the rela-
tion between safety aspects and intuitive direct physi-
cal interaction in collaborative working situations in-
volving man and robotic assistant systems. An hap-
tic interface was introduction able to cover arbitrary
robotic structures and providing the functionality of
an artificial skin. The cylindric cuffs covered by the
artificial skin transformed the scalar valued measure-
ments into a vector valued force which was fed into
the motion generation scheme. For the robotic sys-
tem we proposed an anthropomorphic design with an
redundant manipulator allowing us to satisfy simulta-
neously motion constraints and occurring requests by
the human operator.
This led to an system with a bidirectional physical
interaction channel providing intuitiv and flexible in-
terrelationship between man and machine and safety
for both. The approach is implemented on the an-
thropomorphic robot CORA and evaluated in multiple
experiments.
REFERENCES
Hollerbach, J. (1984). Optimum kinematic design for a
seven degree of freedom manipulator. In 2nd Int.
Symp. Robotics Research, pages 215 –222.
Iossifidis, I. (2013). Motion constraint satisfaction by
means of closed form solution for redundant robot
arms. In Proc. IEEE/RSJ International Conference on
Robotics and Biomimetics (Ro-Bio2013).
Iossifidis, I., Bruckhoff, C., Theis, C., Grote, C., Faubel,
C., and Sch
¨
oner, G. (2002). CORA: An anthropo-
morphic robot assistant for human environment. In
Proceedings. 11th IEEE International Workshop on
Robot and Human Interactive Communication, pages
392–398. IEEE.
Iossifidis, I. and Sch
¨
oner, G. (2004). Autonomous reach-
ing and obstacle avoidance with the anthropomorphic
arm of a robotic assistant using the attractor dynamics
approach. In Proc. IEEE International Conference on
Robotics and Automation ICRA ’04, volume 5, pages
4295—- 4300 Vol.5.
Iossifidis, I. and Sch
¨
oner, G. (2006). Dynamical Systems
Approach for the Autonomous Avoidance of Obsta-
cles and Joint-limits for an Redundant Robot Arm. In
2006 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 580–585. IEEE.
Kreutz-Delgado, K., Long, M., and Seraji, H. (1990). Kine-
matic analysis of 7 DOF anthropomorphic arms. In
Robotics and Automation, 1990. Proceedings., 1990
IEEE International Conference on, pages 824 – 830.
Murray, R., Li, Z., and Sastry, S. (1994). A mathematical
introduction to robotic manipulation. CRC Press.
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
66
