
The Application of Mobile Devices for the Recognition of Malignant
Melanoma
Dmitriy Dubovitskiy
1
, Vladimir Devyatkov
2
and Glenn Richer
3
1
Oxford Recognition Ltd, Cambridge, U.K.
2
Bauman Moscow State Technical University, Moscow, Russia
3
Partner, Rising Curve LLP, Cambridge, U.K.
Keywords:
Skin Cancer, Mobile Device, Pattern Analysis, Decision Making, Object Recognition, Image Morphology,
Machine Vision, Computational Geometry.
Abstract:
Robotic systems and autonomous decision making systems are increasingly becoming a significant part of
our everyday routines. Object recognition is an area of computer science in which automated algorithms
work behind a graphical user interface or similar vehicle for interaction with users or some other feature
of the external world. From a user perspective this interaction with the underlying algorithm may not be
immediately apparent. This paper presents an outline of a particular form of image interpretation via mobile
devices as a method of skin cancer screening. The use of mobile hardware resources is intrinsically inter-
connected with the decision making engine built into the processing system. The challenging fundamental
problem of computational geometry is in offering a software - hardware solution for image recognition in
a complex environment where not all aspects of that environment can fully be captured for use within the
algorithm. The unique combination of hardware - software interaction described in this paper brings image
processing within such an environment to the point where accurate and stable operation is possible, offering
a higher level of flexibility and automation. The Fuzzy logic classification method makes use of a set of
features which include fractal parameters derived from generally understood Fractal Theory. The automated
learning system is helping to develop the system into one capable of near-autonomous operation. The methods
discussed potentially have a wide range of applications in ‘machine vision’. However, in this publication, we
focus on the development and implementation of a skin cancer screening system that can be used by non-
experts so that in cases where cancer is suspected a patient can immediately be referred to an appropriate
specialist.
1 INTRODUCTION
The wide-scale availability of mobile devices offers
the public a range of hardware with built in digi-
tal cameras, with an associated increased potential
for digital image processing. The fast-growing im-
age capturing CCD/CMOS array development is ca-
pable of generating ever larger amounts of data for
processing. The newer internet connections for such
devices, with 3G and 4G data transfer rates, could
deliver an image to power an image processing sta-
tion in an appectable period of time. Storage facili-
ties have also developed to extremely large capacities,
to the extent that a human is unable to process these
volumes of data by manual/visual methods. Given
this situation, technological developments in indus-
try and science will, in future, have to rely increas-
ingly on stable and robust robotic tools to interpret the
acquired data. This applies significantly to the area
medical diagnostics, although the application of auto-
mated approaches in this field still presents a number
of challenges. Innovations in the application of au-
tomatic image recognition will increasing help meet
these challenges in the future.
The increased storage capacity, improved data
transfer rates and processing speeds now enable the
development of image recognition tools for small
hand-held devices. A mobile device’s camera and
navigational human interface leads to a relationship
between the software and hardware built into the de-
vice; there is then a further relationship with the im-
age processing server that assists in the processing of
the complex mathematical equations that necessarily
underpin computerised image processing.
The particular concern of this paper is the use
of such devices for the recognition of malignant
140
Dubovitskiy D., Devyatkov V. and Richer G..
The Application of Mobile Devices for the Recognition of Malignant Melanoma.
DOI: 10.5220/0004803701400146
In Proceedings of the International Conference on Biomedical Electronics and Devices (BIODEVICES-2014), pages 140-146
ISBN: 978-989-758-013-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

melanoma associated with abnormal moles. A key
challenge is to overcome the limited ability of com-
puterised image processing techniques to replicate the
visual techniques that a human specialist uses when
making similar assessments. Consequently, the pro-
cesses used by computerised image recognition mod-
els have to be capable of producing a level of accu-
racy of assessment and diagnosis that is comparable
to that achieved by specialists, but at the same time
this must be done using approaches and algorithms
that are fundamentally different from the process of
human interpretation. A key factor is the need for
segmentation, that is the process of dividing a given
image into a number of segments that will each have
something to contribute towards carrying out an anal-
ysis in a meaningful way. A initial task is to determine
the boundaries of the captured image so that the anal-
ysis is only applied where appropriate. The ability to
compensate for variations in features, light conditions
and the nature of image itself requires an altogether
more complex approach.
These challenges can be addressed in a number of
ways. For example, the consideration of colours and
patterns within the image recognition algorithm con-
tribute towards the definition of boundaries and seg-
ments, including the essential external boundary of
the image. Much of this process is concerned with the
identification of edges of one sort or another (Abdou
and W.K.Pratt, 1979). Indeed this identification is a
pre-requisite for image recognition and a fundamen-
tal step towards ensuring stability and robustness in
decision-making. Establishing the relevant segments
of the image depends on two essential features of the
image: firstly, those areas that can be considered sim-
ilar to each other; and secondly, the identification of
discontinuity. The task of the image recognition pro-
cess is precisely to make the distinction between those
features.
The algorithm used in this application includes a
number of innovations. It does not depend on the
identification of first and second order gradients in a
conventional manner, nor does it make use of thresh-
olds in order to consider binarisation. Rather, self-
organising fuzzy sets are utilised in order to optimise
the Knowledge Data Base (KDB) for the application.
The system includes features that are based on the tex-
tural properties of an image defined in terms of fractal
geometric parameters including the Fractal Dimen-
sion (FD) and Local Texture Detectors(LTD) which is
an important theme in medical image analysis. How-
ever, in this paper we focus on one particular applica-
tion, namely, the skin cancer diagnosis for screening
patients through a mobile device.
2 SKIN CANCER FEATURE
DETECTION AND
CLASSIFICATION
Colour image processing is becoming increasingly
important in object analysis and pattern recognition.
There are a number of algorithms for understanding
two- and three-dimensional objects in a digital im-
age. The colour content of an image is very impor-
tant for reliable automatic segmentation, object detec-
tion, recognition, classification and contributes signif-
icantly to image processing operations required and
the object recognition methodologies applied (Free-
man, 1988). Colour processing and colour interpreta-
tion is critical to the diagnosis of many medical con-
ditions and the interpretation of the information con-
tent of an image by both man and machine. (e.g.
(E.R.Davies, 1997), (Louis and Galbiati, 1990) and
(Snyder and Qi, 2004)).
A typical colour image consists of mixed RGB
signals. A grey-tone image appears as a normal black
and white photograph. However, on closer inspec-
tion it may be seen that it is composed of individual
picture cells or pixels. In fact, a digital image is an
[x, y] array of pixels. We may already have a given
image of an object that can be described by the func-
tion f (x, y) and has a set of features S = {s
1
, s
2
, ..., s
n
}.
The key task is to examine a sample and to establish
how ‘close’ this sample is to the reference image, re-
quiring the creation of a function that can establish the
degree of proximity. All recognition is a process of
comparing features against some pre-established tem-
plate, a process that has to operate within the bounds
of certain conditions and tolerances. We may con-
sider four stages in this process: (i) image acquisition
and filtering (in order to remove noise, although even
at this stage, a proper understanding of what noise is
and what may be pertinent information is essential);
(ii) accurate location of the object, through edge de-
tection (iii) measurement of the parameters of the ob-
ject; and (iv) an estimation of the class of the object.
Various aspects of these stages are considered below,
with a focus on those features of design and imple-
mentation that are most advantageous for the devel-
opment of applications for skin cancer screening.
The image to be acquired has to be suitable for
integration within the application. In the case of
mobile devices the camera is intrinsically bound up
with the operating system of the device. Images ob-
tained using a typical camera of this type are rela-
tively noise free and are digitised using the mobile
device’s standard CCD/CMOS camera. Nevertheless,
the capturing of good quality images with consistent
brightness and contrast features remains critical. The
TheApplicationofMobileDevicesfortheRecognitionofMalignantMelanoma
141
most important aspect is compatibility with the sam-
ple images used. The system discussed in this pa-
per is based on an object detection technique that in-
cludes a novel mobile device segmentation method
that must be applied at the time of taking the picture.
This includes those features associated with an object
for which fractal models are well suited (Dubovitskiy
and Blackledge, 2012), (Dubovitskiy and Blackledge,
2008), (Dubovitskiy and Blackledge, 2009). This sys-
tem provides an output (i.e. a decision) using a knowl-
edge database which generates a result - the diag-
noses. The new ‘expert data’ in the application field
creates a knowledge database by using an automated
self learning technique. The old supervised training
model for objects is well known (Zadeh, 1975).
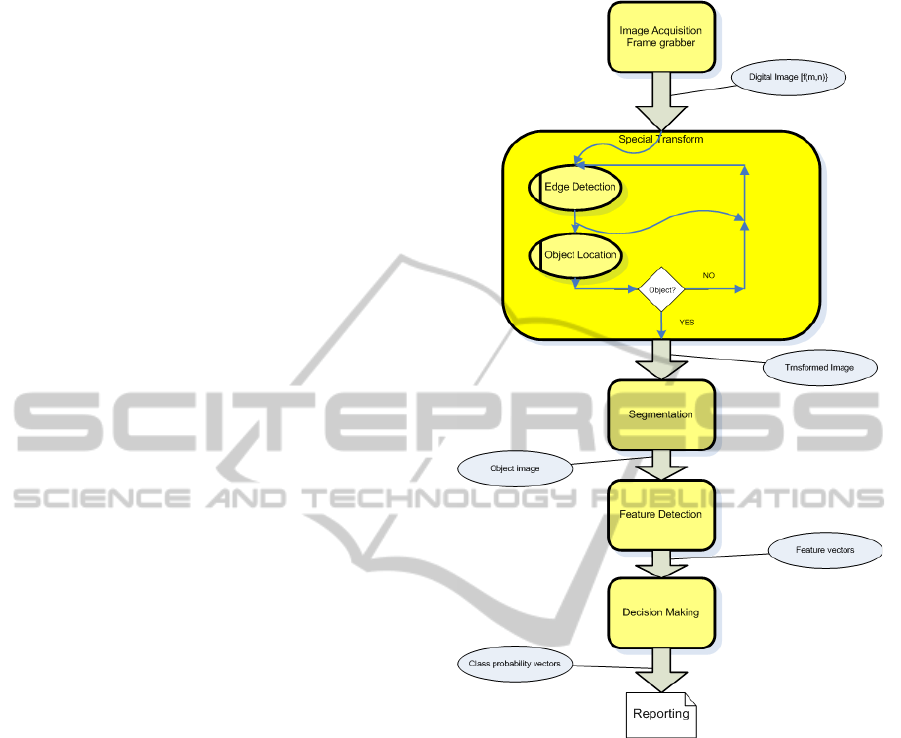
The recognition process is illustrated in Figure 1,
a process that includes the following steps:
1. Image Acquisition and Filtering.
A mobile device capture of a physical object is
digitally imaged and the data transferred to mem-
ory, e.g. using current image acquisition hard-
ware available on a mobile device. The image is
filtered to reduce noise and to remove unneces-
sary features such as light flecks. The most im-
portant of these is the Preliminary image Guide-
line Function(PGF). The PGF works recursively
to reach a stable object fixation. As soon as an
object or mole in our application is detected the
system transmits it to the server.
2. Special Transform: Edge Detection.
The digital image function f
m,n
is transformed
into
˜
f
m,n
to identify regions of interest and pro-
vide an input dataset for segmentation and feature
detection operations (Nalwa and Binford, 1986).
This transformation avoids the use of conven-
tional edge detection filters which have proved to
be highly unreliable in the application under con-
sideration here.
3. Segmentation.
The image { f
m,n
} is segmented into individ-
ual objects { f
1
m,n
}, { f
2
m,n
}, . . . to perform a sepa-
rate analysis of each region. This step includes
such operations as auto thresholding, morpholog-
ical analysis, edge or contour tracing (Dubovit-
skiy and Blackledge, 2009) and the convex hull
method (Dubovitskiy and McBride, 2013).
4. Feature Detection.
Feature vectors {x
1
k
}, {x
2
k
}, . . . are computed from
the object images { f
1
m,n
}, { f
2
m,n
}, . . . and corre-
sponding transformed images {
˜
f
1
m,n
}, {
˜
f
2
m,n
}, . . . .
The features are numeric parameters that charac-
terise the object, including its texture. The com-
puted vectors consist of Euclidean and fractal ge-
Figure 1: Recognition process.
ometric parameters together with one and two di-
mensional statistical measures. The border of
the object is described in one-dimensional terms
while the surface on and around the object is de-
lineated in two dimensions.
5. Decision Making.
This involves assigning a probability to a pre-
defined set of classes (Vadiee, 1993). Class
probability vectors are estimated through the ap-
plication of fuzzy logic (Mamdani, 1976) and
probability theory to the object feature vectors
{x
1
k
}, {x
2
k
}, . . . . Establishing a quantitative rela-
tionship between features and class probabilities
is a critical aspect of this process, and one that has
previously caused problems, i.e.
{p
j
} ↔ {x
k
}
↔ indicates a transformation from class proba-
bility to feature vector space. A ‘decision’ is
BIODEVICES2014-InternationalConferenceonBiomedicalElectronicsandDevices
142

the estimated class of the object coupled with a
probabilistic determination of accuracy (Sanchez,
1976).
Associations between the features and object pat-
tern attributes forms an automatic learning con-
text for the KDB (Dubovitskiy and Blackledge,
2009),(Dubovitskiy and Blackledge, 2008), whereby
the representation of the object is assembled into the
feature vector (Grimson, 1990), (Ripley, 1996). The
KDB depends on establishing equivalence relations
that express a fit of evaluated objects to a class with
independent semantic units. The pattern recognition
task is accomplished by assigning a particular class to
an object. In the next section we consider the main
focus of this paper, the use of mobile devices, and the
loop back to the automated learning algorithm.
2.1 Mobile Device Picture Acquisition
The graphical user interface of mobile device pro-
vides PGF. The user has to be taken through an au-
tomated system to evaluate light condition, focus,
shadow and other relevant features. If some of the
conditions are not suitable for image recognition the
system provides guidelines to assist with the process.
The guidelines may even ask the user to go to another
location where the light will be sufficient to support
the decision making process. The screen message
will indicate that the ”best result could be achieved at
that point”. The use of the inbuilt compass and grav-
itational sensors of mobile devices helps to produce
exceptionally good recognition results. The gravita-
tional sensor in combination with the object’s posi-
tion can guide the user to capture the most suitable
image perspective. The compass assists to select the
best lighting condition to avoid the point of evapora-
tion and shadows.
The block scheme diagram for the mobile device
segmentation for the mole and skin location is present
in Figure 2 and includes the following steps:
The Figure 2 represents a mobile device section
of the Malignant Melanoma recognition process. The
mobile device component has a loopback via PGF and
it would not accept an image with low quality, itself
applying a quality control system to the initial stages
of the process of skin cancer recognition. The main
steps of the mobile system are present in four sec-
tions of figure 2. The object acquisition is shown in
section 1 2 and it is a standard mobile device cam-
era control module. The output of section 1 is an
image function f (x, y) with set of exposure parame-
ters E = {e
1
, e
2
, ..., e
n
}. Mobile device pre-processing
software is present in section 2 and has set of parame-
ters the value between 0....1. The set of mobile device
Figure 2: Mobile device mole - skin searching process.
features is P = {p
1
, p
2
, ..., p
n
}. Each parameter rep-
resents the current environment for image capture, for
example Exposure time, Aperture, Focus section by X
and by Y , Light uniformity by X and by Y , Skin dis-
tribution, Mole positions, Mole distribution. Then the
vector P = {p
1
, p
2
, ..., p
n
} is input to section 3. Sec-
tion 3 is responsible for making decisions about the
image environment. The decision making function is:
S(d
exposure
) =
2π(P
n+1
− P
n
)
D
n+1
− D
n
The output S is the representation of the environ-
ment condition. If S is closer to 0 then the user is
advised to point to the mole. Then if S is closer to
1 the the system routes via PGF. The actual value of
S is device dependent and could be set through the
software installation procedure. The D is the scalar
distance for each parameter P for the particular num-
ber of iteration n. Section 4 provides guidelines for
the user. The PGF is the probabilistic function with
TheApplicationofMobileDevicesfortheRecognitionofMalignantMelanoma
143
a vector of values of parameters S = {d
i
}. The PGF
transform the vector of values of parameters S = {d
i
}
by use of the membership function m
j
(x) from Fuzzy
Logic theory and the output is vector G by using the
following expression:
G
i, j
=
1 −
N
∑
k=1
p
i, j
(S
k
i, j
) −
p
i, j
(S
i, j
)
p
i, j
(x
k
i, j
)
.
The matrix of weight factors p
i, j
is formed at the
stage of software installation to the mobile device ac-
cordingly. In other terms, it is touch pad calibration,
assigning weight coefficients for the i
th
parameter and
j
th
class.
The result of the weight matching procedure is
that all parameters G
i, j
have been computed. Then
each G
i, j
has a semantic table of guide rules for the
touch pad and user. After several iterations the PGF’s
parameters G
i, j
is to come to the 1. At that point the
image looks as shown on Figure 4 and ready to be
transferred to the main decision making server.
The novel PGF procedure allows the saving of
a lot of computational resources at the usual image
pre-processing stage for an accurate decision mak-
ing function. The usual low brightness, contrast, im-
age graininess and geometrical distortions no longer
inhibit the most efficient edge detection and texture
computation.
2.2 Fuzzy Logic Automated Leaning
Object recognition is another difficult part of digi-
tal image processing. Each object has to be present
in computer memory with all possible characteristic
features and as compact as possible, in order to al-
low real time processing. The basis for the object’s
area is textural feature. The Fractal structure is most
suitable for describing such objects from the natural
world. Some Euclidean and morphological measures
are also captured as part of property of the object.
All objects have a list of parameters. This list of pa-
rameters has been considered in previous publications
(Dubovitskiy and Blackledge, 2012), (Dubovitskiy
and Blackledge, 2008), (Dubovitskiy and Blackledge,
2009) and can be varied depending on the applica-
tion. Using an excessive number of parameters does
not impact the accuracy of recognition but can slow
down the whole process. Here we present a novel
approach to the organising of membership function
through a special automated learning procedure. The
use of a Fuzzy Logic engine with automated member-
ship function formation has several advantages. The
one disadvantage is that we have to extend the set of
parameters for an object with extra characteristic val-
ues. But as computational resources in modern CPU
and FPGA are nearly unlimited this is not a problem
and as a result we obtain a user friendly system. The
excessive features which do not characterise an ob-
ject will be insignificant by putting their coefficient
to 0 in the membership function during learning time.
The whole process can be divided onto three stages:
Decision making, Learning and Correction process.
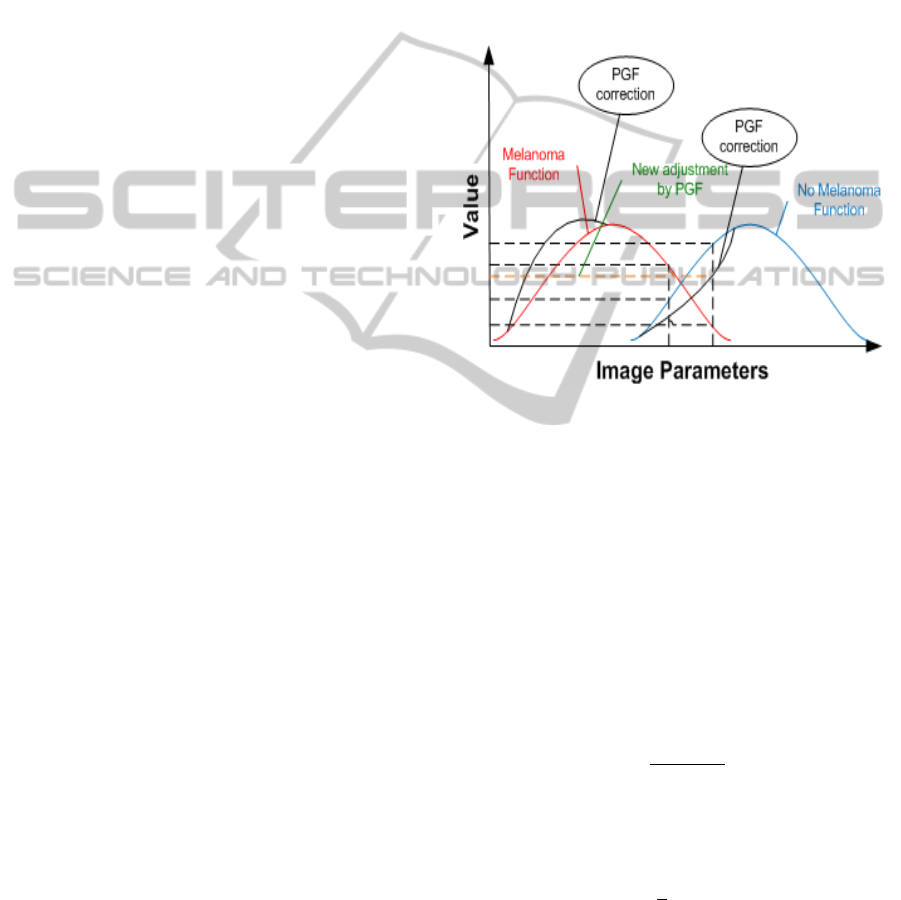
The Fuzzy Logic membership function is present
in Figure 3:
Figure 3: Fuzzy logic automated leaning.
The information about the object’s classes is
stored in the KDB and can be stored as a file (*.kdb)
and loaded to the system depending on the applica-
tion. The object information in the KDB is repre-
sented through probability coefficients for the partic-
ular class. The class probability is vector p = {p
j
}.
It is estimated from the object feature vector x =
{x
i
} and membership functions m
j
(x) defined in the
knowledge database and is shown on the blue and
green lines on Figure 3. If m
j
(x) is a membership
function, then the probability for each j
th
class and i
th
feature is given by value vector:
p
j
(x
i
) = max
"
σ
j
x
i
− x
j,i
· m
j
(x
j,i
)
#
where σ
j
is the distribution density of values x
j
at the
point x
i
of the membership function. The next step is
to compute the mean class probability given by
hpi =
1
j
∑
j
w
j
p
j
where w
j
is the weight coefficient matrix. This value
is used to select the class associated with
p( j) = min [(p
j
· w
j
− hpi) ≥ 0]
BIODEVICES2014-InternationalConferenceonBiomedicalElectronicsandDevices
144

providing a result for a decision associated with the
j
th
class. The weight coefficient matrix is adjusted
during the learning stage of the algorithm.
The automatic learning procedure uses the PGF
settings from the mobile device. These settings pro-
vide information about image quality. The G
i, j
vec-
tor is used to consider the correction value at each
recognition process. The correction value coefficient
is stored separately and updates the main KDB once
a day. The presence of correction value is not guar-
anteed to be used for membership function formation.
The decision to use automated correction is defined
by assessing the density distribution for the member-
ship function for each class of objects. The use of
density propagation as part of a particular class func-
tion is present in Section 2.3 and we use low density
as the indicator for correction. The actual value is
mobile device hardware dependent.
2.3 Image Recognition Server
The result of the image recognition process is pre-
sented via the GUI interface for the image processing
server on Figure 4. The device returns the diagno-
sis and graphical comments to the user. The system
can provide further recommendations, depending on
country of application, including contacts of a local
GP or other health care provider as necessary.
The decision criterion method considered here
represents a weighing-density minimax expression.
The estimation of decision accuracy is achieved by
using the density function
d
i
=
|
x
σ
max
− x
i
|
3
+ [σ
max
(x
σ
max
) − p
j
(x
i
)]
3
with an accuracy determined by
P = x
j
p
j
− x
j
p
j
2
π
N
∑
i=1
d
i
.
The system has been tested on 654 available im-
ages of skin conditions and produced an overall accu-
racy of approximately 74 percent correct responses.
The correct response is when the recognition system
is assigning the same class and precision within 10
percent deviation from the result of a dermatologist or
human eye estimate. The comparison to the biopsy is
not producing better performance as the robot is the
copy of dermatologist. There are some cases when
even a dermatologist would be unable to make a cer-
tain decision without special equipment. The oper-
ational use of the automated correction function the
system can deliver the highest accuracy. The best
result would be achieved if we could get agreement
for the estimate class separation for precision between
Figure 4: Image recognition server.
several dermatologists for initial setup. However, due
to ethical confidentiality we are unable to publish test-
ing data due to nondisclosure agreements. In difficult
cases an expert could interact with the image recogni-
tion robot to adjust the settings for a particular mobile
device.
In practice it is difficult to get exactly the same
skin evaluation parameters from several doctors. The
problem is with precision - how certain are they with
the diagnosis. By mixing knowledge databases of dif-
ferent sources we create chaos in automated decision
making. In our current paper we have decided to eval-
uate the system with one doctor for now.
3 CONCLUSIONS
The focus of this paper is Malignant Melanoma
screening and in particular with the process of devel-
oping a methodology for implementing applications
for such screening via mobile devices. The approach
we have described involves two essential elements: (i)
the partial analysis of an image in terms of its fractal
structure on a mobile device CPU to get the best ex-
posure condition for the available camera (ii) an au-
tomated learning system via a fuzzy logic engine to
classify an object based on its euclidean and fractal
geometric properties, achieved via access to the im-
age processing server. The combination of these two
aspects is used to define an approach to image pro-
cessing and an image analysis engine that is unique.
The inclusion of mobile device parameters - in terms
of improving vision systems such as the one consid-
ered here - remains to be fully understood and will
form part of future investigations.
As things currently stand, the approach to the
TheApplicationofMobileDevicesfortheRecognitionofMalignantMelanoma
145

analysis of images described above is not in itself suf-
ficient as a system of image recognition and classi-
fication. However, increases in processing rates, the
growth of the availability of relatively cheap digital
storage and the capacity to transfer data to and from
an image processing server at high speed all con-
tribute towards a significant future potential for the
use of hand held devices in the diagnosis of skin can-
cer associated with moles. Future work will include
improvements to the automation of the fuzzy logic
engine used with current hardware and mobile de-
vices. As reliability and validation is extended there
is considerable potential for the expansion of the ap-
proach we have described within the context of medi-
cal screening and to other areas of application beyond
the medical sphere.
ACKNOWLEDGEMENTS
The authors are grateful for consultancy of Dr Daniela
Piras.
REFERENCES
Abdou, I. and W.K.Pratt (1979). Quantitative design and
evaluation of enhancement thresholding edge detec-
tors. Proc. IEEE, 1(67):753–763.
Dubovitskiy, D. A. and Blackledge, J. M. (2008). Sur-
face inspection using a computer vision system that
includes fractal analysis. ISAST Transaction on Elec-
tronics and Signal Processing, 2(3):76 –89.
Dubovitskiy, D. A. and Blackledge, J. M. (2009). Texture
classification using fractal geometry for the diagnosis
of skin cancers. EG UK Theory and Practice of Com-
puter Graphics 2009, pages 41 – 48.
Dubovitskiy, D. A. and Blackledge, J. M. (2012). Tar-
geting cell nuclei for the automation of raman spec-
troscopy in cytology. In Targeting Cell Nuclei for
the Automation of Raman Spectroscopy in Cytology.
British Patent No. GB1217633.5.
Dubovitskiy, D. A. and McBride, J. (2013). New ‘spider’
convex hull algorithm for an unknown polygon in ob-
ject recognition. BIODEVICES 2013: Proceedings of
the International Conference on Biomedical Electron-
ics and Devices, page 311.
E.R.Davies (1997). Machine Vision: Theory, Algorithms,
Practicalities. Academic press, London.
Freeman, H. (1988). Machine vision. Algorithms, Architec-
tures, and Systems. Academic press, London.
Grimson, W. E. L. (1990). Object Recognition by Comput-
ers: The Role of Geometric Constraints. MIT Press.
Louis, J. and Galbiati, J. (1990). Machine vision and digital
image processing fundamentals. State University of
New York, New-York.
Mamdani, E. H. (1976). Advances in linguistic synthesis of
fuzzy controllers. J. Man Mach., 8:669–678.
Nalwa, V. S. and Binford, T. O. (1986). On detecting
edge. IEEE Trans. Pattern Analysis and Machine In-
telligence, 1(PAMI-8):699–714.
Ripley, B. D. (1996). Pattern Recognition and Neural Net-
works. Academic Press, Oxford.
Sanchez, E. (1976). Resolution of composite fuzzy relation
equations. Inf.Control, 30:38–48.
Snyder, W. E. and Qi, H. (2004). Machine Vision. Cam-
bridge University Press, England.
Vadiee, N. (1993). Fuzzy rule based expert system-I. Pren-
tice Hall, Englewood.
Zadeh, L. A. (1975). Fuzzy sets and their applications to
cognitive and decision processes. Academic Press,
New York.
BIODEVICES2014-InternationalConferenceonBiomedicalElectronicsandDevices
146
