
SCHOG Feature for Pedestrian Detection
Ryuichi Ozaki and Kazunori Onoguchi
Graduate School of Science and Technology, Hirosaki University, 3 Bunkyo-cho, Hirosaki, Aomori, 036-8561, Japan
Keywords:
Pedestrian detection, Co-occurrence Histograms of Oriented Gradients, Similarity, Support Vector Machine.
Abstract:
Co-occurrence Histograms of Oriented Gradients(CoHOG) has succeeded in describing the detailed shape of
the object by using a co-occurrence of features. However, unlike HOG, it does not consider the difference of
gradient magnitude between the foreground and the background. In addition, the dimension of the CoHOG
feature is also very large. In this paper, we propose Similarity Co-occurrence Histogram of Oriented Gradi-
ents(SCHOG) considering the similarity and co-occurrence of features. Unlike CoHOG which quantize edge
gradient direction to eight directions, SCHOG quantize it to four directions. Therefore, the feature dimen-
sion for the co-occurrence between edge gradient direction decreases greatly. In addition to the co-occurrence
between edge gradient directions the binary code representing the similarity between features is introduced.
In this paper, we use the pixel intensity, the edge gradient magnitude and the edge gradient direction as the
similarity. In spite of reducing the resolution of the edge gradient direction, SCHOG realizes higher perfor-
mance and lower dimension than CoHOG by adding this similarity. We have focused on pedestrian detection
in this paper. However, this method is also applicable to various object recognition by introducing various
kind of similarity. In experiments using the INRIA Person Dataset, SCHOG is evaluated in comparison with
the conventional CoHOG.
1 INTRODUCTION
Recently, a pedestrian detection system have been
put to practical use as a vehicle safety device(Hattori
et al., 2009). Since features expressing characteris-
tics of a person well is important in these system,
various features for pedestrian detection have been
proposed. T.Ojala et al. proposed the Local Binary
Pattern(LBP)(Ojala et al., 1996) representing the re-
lation between the intensity of an interest pixel and
the intensity of eight adjacent pixels. This feature
has been studied in various ways because it’s robust
to illumination change and it’s implemented easily.
Y.Cao et al. proposed the Advanced LBP(Cao Yun-
yun, 2011) which is robust to noise and low inten-
sity. N.Dalal proposed HOG(Dalal and Triggs, 2005)
feature which is robust to the change of the pedes-
trian’s posture and the change of the illumination by
generating the histogram of the edge gradient ori-
entation in each block and normalizing each block
for every cell. They also proposed the feature fo-
cusing on the gradient orientation of the time se-
ries(Dalal et al., 2006). T.Watanabe et al. proposed
CoHOG feature that represented the co-occurrence of
gradient orientation and showed high performance for
pedestrian detection. As other features using the co-
occurrence, T.Kobayashi et al. proposed a Gradient
Local Auto-Correlation(GLAC)(Kobayashiand Otsu,
2008) which calculated the autocorrelation of the po-
sition and edge gradient orientation. K.Yamaguchi
et al. proposed a two-dimensional gradient orienta-
tion histogram using polar coordinates which can ex-
press small difference(K. Yamaguchi, 2011). S.Walk
et al. proposed the Color Self-Similarity(CSS)(Walk
et al., 2010) feature using the similarity of HSV his-
togram in the local area. As mentioned above, the
co-occurrence of feature is effective for improving
the performance of pedestrian detection. However,
there is a problem that the dimension of the feature
increases significantly.
In this paper, we propose SCHOG which consists
of the co-occurrence of edge gradient direction and
the similarity. Although SCHOG quantizes edge gra-
dient direction to the half of CoHOG, it can represent
the shape of the object more finely than CoHOG by
adding the similarity to the co-occurrenceof edge gra-
dient direction. Because the similarity is represented
by the binary code, the dimension of SCHOG is a
half of the conventional CoHOG in spite of adding the
similarity. We evaluate three kind of similarity, such
as the pixel intensity, the edge gradient magnitude and
the edge gradient direction in the experiment. These
60
Ozaki R. and Onoguchi K..
SCHOG Feature for Pedestrian Detection.
DOI: 10.5220/0004813000600066
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 60-66
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

values are not used directly in CoHOG. Therefore, the
proposed feature can compensate information lost in
CoHOG. In the experiment, the edge gradient magni-
tude showed the best performance.
Experimental result using the INRIA Person
Dataset and the Support Vector Machine shows that
the performance of SCHOG is better than the conven-
tional CoHOG.
The rest of this paper is organized as follow. In
Section 2, the proposed method is explained in detail
and its extensibility is discussed. In Section 3, the
performance of the SCHOG is evaluated by compar-
ing with the conventional CoHOG. In Section 4, this
paper is summarized.
2 PROPOSED FEATURE
Pedestrians show a various shape, e.g., standing, run-
ning, or shaking the hand. In addition, they wear
clothes of various texture and color. Moreover, in the
outdoor, illumination changes frequently and a lot of
image noise occurs. CoHOG has solved these prob-
lems to some extent although it needs very large fea-
ture dimension. The proposed feature (SCHOG) im-
proves CoHOG so that it can have better performance
and lower feature dimension.
2.1 CoHOG
In this section, the outline of CoHOG is explained.
CoHOG uses a two-dimensional histogram whose bin
is a pair of edge gradient direction between the inter-
est pixel and the offset pixel. The feature dimension
becomes large since histograms are created for every
combination of the interest pixel and the offset pixel.
However, it can represent object shape finely and it is
robust to the change of shape and illumination.
At first, the edge gradient magnitude(M) and the
edge gradient direction(θ) are obtained from equa-
tions (1) and (2).
θ(x, y) = tan
−1
f
y
(x, y)
f
x
(x, y)
(1)
M(x, y) =
q
f
x
(x, y)
2
+ f
y
(x, y)
2
, (2)
where f
x
(x, y) and f
y
(x, y) denote edge gradient
magnitude of horizontal direction and that of verti-
cal direction in the pixel (x, y), which are calculated
by Sobel operator. Gradient direction(θ) is quantized
to eight directions by 45 degrees. Figure 1 shows the
gradient direction image and the gradient magnitude
image. The direction is represented by color and the
Figure 1: Examples of gradient direction and gradient mag-
nitude.
Figure 2: The number and position of the offset pixel.
magnitude is represented by the brightness. Same di-
rection often appears around the contour of a pedes-
trian. CoHOG represents this characteristic by the co-
occurrence of edge gradient direction between the in-
terest pixel and the offset pixel.
31 offset pixels are set around the interest pixel as
shown in Figure 2. The interest pixel is included in
offset pixels. Two dimensional histogram is created
for every offset pixel. If the offset pixel corresponds
the interest pixel, the histogram has eight bins because
the gradient direction of each pixel is same. Except
for this case, the histogram has 8 × 8 = 64 bins be-
cause the number of bins is a combination of gradient
direction.
The input image is divided into several rectangular
blocks as shown in Figure 3. In each block, the 2D
histogram is created for every offset pixels. Let (p, q)
be the image coordinate system whose origin is at the
upper left of each block, (x, y) be a offset coordinate
system whose origin is at the interest pixel and C
x,y
be the 2D histogram of an offset pixel (x, y). The bin
SCHOGFeatureforPedestrianDetection
61

Figure 3: Example of 2D histogram in CoHOG.
C
x,y
(i, j) of 2D histogram C
x,y
is incremented by
C
x,y
(i, j)
=
n−1
∑
p=0
m−1
∑
q=0
1
if I(p, q) == i
and I(p+ x,q+ y) == j
0 otherwise ,
where I is the gradient-orientation image, n is
the horizontal size of a block and m is the vertical
size of a block. In each block, feature dimension is
8 + 64 × 30 = 1928. Figure 3 shows the example
of the 2D histogram in CoHOG. In this example,
an input image is divided into 2 × 8 blocks and in
each block, the 2D histogram is created for every
offset pixels. CoHOG does not perform the normal-
ization of the histogram because CoHOG does not
accumulate the gradient magnitude in the bin of the
histogram, unlike HOG feature.
2.2 SCHOG
Since CoHOG uses only the relation between the gra-
dient direction of the interest pixel and that of the
offset pixel, other information acquired on the way,
such as the pixel intensity or the gradient magnitude,
is thrown away. SCHOG improves the performance
by adding this information. SCHOG uses not only
the co-occurrence of the gradient direction but also
that of the similarity. In this paper, we evaluate the
pixel intensity, the gradient magnitude and the gra-
dient direction as the similarity although various fea-
tures can be use as the similarity. The computing time
does not increase because these features are obtained
as the gradient direction is calculated.
The procedure of feature extraction is described
below. At first, the gradient intensity and the gradi-
ent orientation are calculated by equations (1) and (2)
as well as CoHOG. Offset pixels around the interest
pixel are set as the same position as CoHOG. Next,
we create the 2D histogram representing the relation
between the gradient direction of the interest pixel and
that of the offset pixel. Unlike CoHOG, the gradient
direction is quantized to four directions by 90 degrees.
However, the gradient direction is quantized to eight
directions by 45 degrees when the offset pixel cor-
responds the interest pixel because this hardly influ-
ences the number of feature dimension, as described
later. The main difference between SCHOG and Co-
HOG is that SCHOG adds the similarity between fea-
tures, such as the pixel intensity, the gradient magni-
tude or the gradient orientation, to the co-occurrence
of the gradient direction. SCHOG can represent the
shape of the object more finely than CoHOG since
these features which CoHOG does not use directly
are incorporated. The similarity between the interest
pixel and the offset pixel is given by
F
sim1
(V
o
,V
i
) =
0 if T
1
< tan
−1
V
i
V
o
< T
2
1 otherwise
F
sim2
(V
o
,V
i
) =
0
if T
3
< |V
o
−V
i
|
or T
4
> |V
o
−V
i
|
1 otherwise ,
where F
sim1
is the similarity function for the pixel
intensity or gradient magnitude, F
sim2
is the similar-
ity function for the gradient angle, V
i
is the pixel in-
tensity, the gradient magnitude or the gradient direc-
tion in the intensity pixel and V
o
is the pixel intensity,
the gradient magnitude or the gradient direction in the
offset pixel. Thresholds T
1
, T
2
, T
3
and T
4
in equations
(3) and (3) were determined experimentally. The sim-
ilarity returns 0 when features are similar and it re-
turns 1 when features are different. The feature di-
mension is suppressed because the similarity is repre-
sented by the binary code.
We divide the input image into 6× 12 blocks. Let
(p, q) be the image coordinate system whose origin
is at the upper left of each block, (x,y) be a offset
coordinate system whose origin is at the interest pixel
and C
x,y,s
be the histogram of an offset pixel (x, y) and
similarity s. The binC
x,y,s
(i, j, k) of histogramC
x,y,s
is
incremented by
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
62
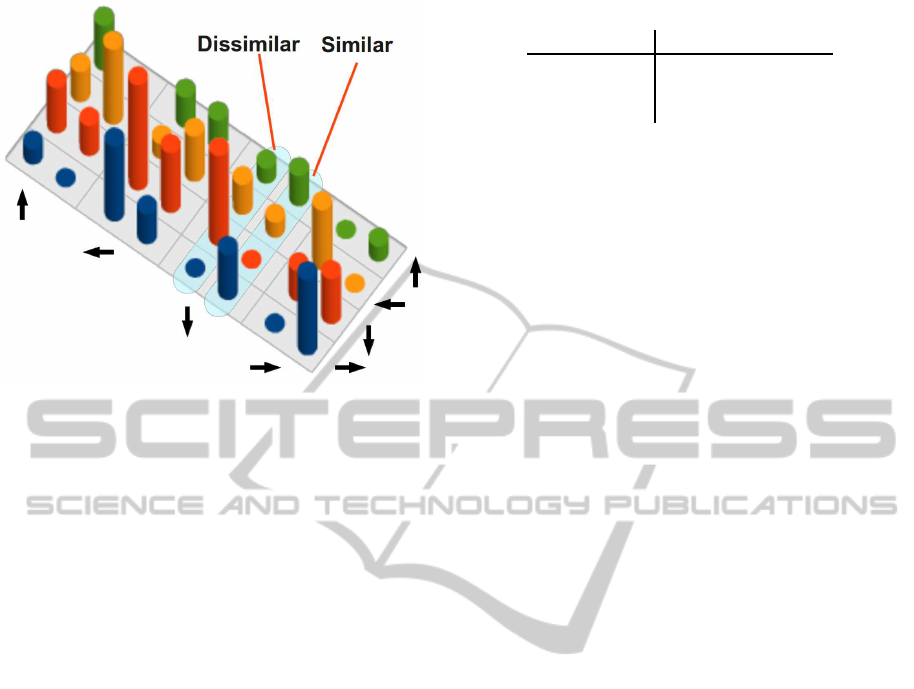
Figure 4: Example of a histogram used in SCHOG.
C
x,y,s
(i, j, k)
=
n−1
∑
p=0
m−1
∑
q=0
1
if I(p, q) == i
and I(p+ x, q+ y) == j
and F
sim
(a, b) == k
0 otherwise ,
Where I is gradient-orientation image, n and m
represent the size of a block, a represents feature
value at the offset pixel, b represents feature value at
the interest pixel. k(0 or 1) represents the similarity.
When the offset pixel corresponds the interest pixel,
the dimension is 8. Since this case is not related to
the co-occurrence, number of total feature dimension
hardly increase even if the dimension is 8. The other
offset pixel has 16 dimensions for a combination of 4
gradient directions and 2 dimensions for the similar-
ity. Therefore, in each block, the total dimension of
SCHOG is 8+ 16× 2× 30= 968. This is about a half
of CoHOG. Figure 4 shows the example of the his-
togram representing the co-occurrence of the gradient
direction and the gradient magnitude. There are two
bins that represent the similarity for each combination
of directions.
In this paper, we use the pixel intensity, the gra-
dient magnitude or the gradient direction as the fea-
ture for the similarity. However, the framework of
SCHOG can easily introduce various features, avoid-
ing the steep increase in a number of dimension be-
cause it uses the binary code to represent the simi-
larity. The name described in Table 1 is attached for
every kind of similarity. SCHOG-pix uses the pixel
intensity as the similarity. SCHOG-gra uses the gra-
dient magnitude as the similarity. Although this in-
formation is directly used in HOG, it is deleted in Co-
Table 1: The name of SCHOG for each similarity.
name
similarity
SCHOG-pix pixel intensity
SCHOG-gra gradient magnitude
SCHOG-ang
gradient direction
HOG. SCHOG-ang uses the gradient direction as the
similarity. Since this similarity is calculated from the
angle before quantization, it’s expected that the finer
relation between gradient directions can be expressed.
3 EXPERIMENTAL RESULTS
We carried out experiments using a SVM classi-
fier(SVMLight, Linear-kernel). The ROC curve,
which shows the True Positive ratio for the vertical
axis and shows the False Positive ratio for the hor-
izontal axis, is used for evaluating the performance.
It shows that performance is better, so that the curve
goes to the upper left.
3.1 Dataset
We adopted INRIA Person Dataset that various pre-
vious paper have used for evaluation. Figure 5 shows
some examples in this dataset. We used 2,416 posi-
tive images and 12,180 negative images for training.
Ten regions randomly extracted from an image were
used as negative images. The size of a positive image
is 64× 128 pixels and the size of a negative image is
from 214× 320 to 648× 486. 1,132 positive images
and 453 negative images are used for test. The size of
a positive image is as same as an image for training
and the size of a negative image is from 242× 213 to
690× 518. The dataset used in experiments is sum-
marized in Table 2.
3.2 Feature Decrease in CoHOG
Before evaluating the performance of SCHOG, we
examined how much performance decreased by quan-
tizing the gradient direction to four directions. We
names SCHOG without the similarity SCHOG-no-
sim. This is the same as CoHOG whose gradient di-
rection is quantized to not eight directions but four di-
rections. The dimension of SCHOG-no-sim is about
1/4 of CoHOG. Figure 6(a) shows the performance
of SCHOG-no-sim and CoHOG. The fall of perfor-
mance which occurred by reducing quantization of
the gradient direction is few. This result shows that
four directions are enough for the co-occurrence of
SCHOGFeatureforPedestrianDetection
63

Table 2: Details of INRIA Person Dataset.
(a) Training data
image size positive 64× 128
negative 214× 320 - 648× 486
number positive 2416
negative 1218× 10 = 12180
(b) Test data
image size positive 64× 128
negative 242× 213 - 690× 518
number positive 1132
negative 453
(a) positive image
(b) negative image
Figure 5: Example of INRIA Person Dataset. (a) Person
image (b) Cropped negative.
the gradient direction if this slight fall of performance
is supplemented with other features like the similarity.
3.3 Effect of Similarity
Figure 6(b) shows the performance of CoHOG,
SCHOG-pix, SCHOG-gra and SCHOG-ang.
SCHOG-pix, SCHOG-gra and SCHOG-ang use
the pixel intensity, the gradient magnitude and the
gradient direction as the similarity respectively. The
dimension of these features is a half of CoHOG. In
Figure 6(b), the True Positive ratio of SCHOG-pix,
SCHOG-gra, SCHOG-ang and CoHOG is 90.12%,
93.13%, 87.37% and 88.07% respectively when the
False Positive ratio is 0.1%. SCHOG-pix shows
the almost same performance as CoHOG although
it uses the simple feature like the pixel intensity as
the similarity. SCHOG-gra, which uses the gradient
magnitude as the similarity, shows quite better
performance than CoHOG. This result shows that the
gradient magnitude which CoHOG omitted is effec-
tive to improve performance of pedestrian detection.
The performance of SCHOG-ang is slightly inferior
to CoHOG. This result shows that the similar feature
does not contribute to improvement in performance.
In this experiment, it was shown that SCHOG whose
similarity is the gradient magnitude can obtain better
performance than CoHOG although the resolution
of the gradient direction is a half of CoHOG. The
summary of features used in this experiment is shown
in Table 3.
Figure 7 shows failure examples of SCHOG-gra
and CoHOG. Figure 7(a) shows examples to which
both SCHOG-gra and CoHOG failed in detection.
Pedestrians with low contrast to a background were
not detected. Figure 7(b) shows examples to which
only CoHOG failed in detection. CoHOG failed be-
cause the gradient direction around a pedestrian’s
contour is scattering, but SCHOG succeeded using
the difference in the gradient magnitude between a
pedestrian and a background. Figure 7(c) shows ex-
amples to which only SCHOG failed in detection.
In these examples, pedestrians were not detected be-
cause the gradient magnitude around the pedestrian’s
contour is similar.
4 CONCLUSIONS
In this paper, we proposed the novel feature named
SCHOG which improved CoHOG feature so that the
detection performance might improve and the fea-
ture dimension might decrease. SCHOG consists of
the co-occurrence of edge gradient direction and the
similarity. Although SCHOG quantizes edge gradi-
ent direction to the half of CoHOG, it can represent
the shape of the object more finely than CoHOG by
adding the similarity to the co-occurrenceof edge gra-
dient direction. Because the similarity is represented
by the binary code, the dimension of SCHOG is a
half of the conventional CoHOG in spite of adding the
similarity. Experimental results using INRIA Person
Dataset showed that reducing quantization of the gra-
dient direction hardly causes the fall of performance
and SCHOG whose similarity is gradient magnitude
have quite better performance than CoHOG.
As the similarity, the pixel intensity, the gradi-
ent magnitude and the gradient direction were eval-
uated in this paper. However, since the similarity is
simply represented by the binary code, other various
features such as color information or a combination
of features are allowed as the similarity. Therefore,
SCHOG can be applied to various application of ob-
ject recognition. Presently, our method uses the same
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
64

(a) Performance of CoHOG and SCHOG-no-sim. (b) Comparison of the proposed method and CoHOG.
Figure 6: Performance of the proposed method.
(a) Examples to which both CoHOG and SCHOG-gra failed in detection.
(b) Examples to which only CoHOG failed in detection.
(c) Examples only SCHOG failed in detection.
Figure 7: Examples of failure detection. Left is the original image, and right is gradient direction image.
arrangement of offset pixels as CoOG. However, this arrangement is important for improving performance
SCHOGFeatureforPedestrianDetection
65
Table 3: Summary of proposed features.
Name Dimension per Block Similarity Performance TP(FP=0.1[%])
SCHOG-pix 8+ 16× 2× 30= 968 pixel intensity fair 90.1066
SCHOG-gra 8+ 16× 2× 30= 968 magnitude good 93.1310
SCHOG-ang 8+ 16× 2 × 30= 968 gradient direction bad 87.3676
CoHOG 8+ 8× 8× 30= 1928 bad 88.0733
and the number of dimension can be reduced greatly
if the number of offset pixels is reduced. In the future,
we will examine the optimal arrangement and optimal
number of offset pixels. Then, we clarify the perfor-
mance by experiments using different data sets.
REFERENCES
Cao Yunyun, H. N. (2011). Detecting pedestrians using an
advanced local binary pattern histogram. In 18th ITS
World Congress, Orlando, 2011. Proceedings.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Schmid, C., Soatto,
S., and Tomasi, C., editors, International Conference
on Computer Vision & Pattern Recognition, volume 2,
pages 886–893, INRIA Rhˆone-Alpes, ZIRST-655, av.
de l’Europe, Montbonnot-38334.
Dalal, N., Triggs, B., and Schmid, C. (2006). Human de-
tection using oriented histograms of flow and appear-
ance. In Proceedings of the 9th European conference
on Computer Vision - Volume Part II, ECCV’06, pages
428–441, Berlin, Heidelberg. Springer-Verlag.
Hattori, H., Seki, A., Nishiyama, M., and Watanabe, T.
(2009). Stereo-based pedestrian detection using mul-
tiple patterns. In BMVC. British Machine Vision As-
sociation.
K. Yamaguchi, T. N. (2011). Two dimensional histograms
of oriented gradients for pedestrian detection. IEICE
Transactions on Fundamentals of Electronics, Com-
munications and Computer Sciences. D, Information
System, 94(1):365–373.
Kobayashi, T. and Otsu, N. (2008). Image feature extrac-
tion using gradient local auto-correlations. In Forsyth,
D. A., Torr, P. H. S., and Zisserman, A., editors, ECCV
(1), volume 5302 of Lecture Notes in Computer Sci-
ence, pages 346–358. Springer.
Ojala, T., Pietik¨ainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on featured distributions. Pattern Recognition,
29(1):51–59.
Walk, S., Majer, N., Schindler, K., and Schiele, B. (2010).
New features and insights for pedestrian detection. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), San Francisco. IEEE, IEEE.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
66
