
Curve Reconstruction from Noisy and Unordered Samples
Marek W. Rupniewski
Institute of Electronic Systems, Warsaw University of Technology, Nowowiejska 15/19, 00-665 Warsaw, Poland
Keywords:
Curve Reconstruction, Noisy Samples.
Abstract:
An algorithm for the reconstruction of closed and open curves from clouds of their noisy and unordered
samples is presented. Each curve is reconstructed as a polygonal path represented by its vertices, which
are determined in an iterative process comprising evolutionary and decimation stages. The quality of the
reconstruction is studied with respect to the local density of the samples and the standard deviation of the
noise perturbing the samples. The algorithm is verified to work for arbitrary dimensions of ambient space.
1 INTRODUCTION
In many engineering problems, there is a need to fit
a curve to an irregularly spaced set of points. Typ-
ically, these problems fall into one of the following
categories. If the ordered points lie exactly on the
curve to be found, then one deals with an interpo-
lation problem. If the points still lie on the curve,
but their order on the curve is unknown, then one
must recover the order prior to interpolation. For this
task, one may use e.g. the algorithms presented in
(Gold and Snoeyink, 2001), (Dey et al., 2000), (Al-
thaus and Mehlhorn, 2001). If one knows the order
of the points along the curve, but the points are dis-
turbed by the noise, then one approximates the curve
usually with some kind of splines, see e.g. (Co-
hen and O’Dell, 1989), (Fritsch and Carlson, 1980),
(H¨olzle, 1983). Finally, one may face a problem
where both the noise is present, and the order of the
sample points along the curve is unknown. This kind
of problem appears in Computed Axial Tomography
(CAT), Coordinate-Measuring Machine (CMM) mea-
surements and Magnetic Resonance Imaging (MRI).
In the literature, there are given various strategies to
solve the problems falling into this class. Fang and
Gossard (Fang and Gossard, 1995) proposed fitting
a curve with given end-points by minimizing some
spring energy function. Goshtasby (Goshtasby, 2000)
obtained a reconstruction by tracing ridges of a cer-
tain inverse distance function (for this, he needed
to evaluate the function on a dense grid). A pixel-
based solution was proposed by Pottmann and Ran-
drup (Pottmann and Randrup, 1998). They recovered
a curve as a medieval line of a set of pixels (of appro-
priate size) that cover the points. There is also an ap-
proach to the problem based on moving least-square
method showed by Levin (Levin, 1998) and improved
by Lee (Lee, 2000). A more statistic point of view
led Hastie and Stuetzle (Hastie and Stuetzle, 1989)
towards the reconstruction of the unknown curve as
a principal curve of the given set of points. Finally,
let us mention the work of Cheng et al. (Cheng et al.,
2005) in which a curve was reconstructed by deter-
mining and following a minimum width strip contain-
ing the noisy points.
The way we solve the problem of curve recon-
struction starts with a choice of a number of balls cen-
tered at the curve samples. Then, in each iteration,
the balls are moved (hopefully towards the original
curve) and their number is reduced in such a way that
they do not overlap too much. Eventually, the balls’
centers are ordered and then claimed to be consecu-
tive vertices of a polygonal path approximating the
curve being recovered (see Fig. 1 for an example of
the cloud of samples and a result of the reconstruc-
tion algorithm).
The obtained polygonalpath, being an approxima-
tion itself, may also play a role of an “initial guess”
that is fundamental for the success of more sophisti-
cated reconstruction algorithms (see e.g. (Ruiz et al.,
2013)). One may also use the obtained vertices for
construction of a smooth, instead of a polygonal, ap-
proximation based, for example, on splines or rational
Gaussian curves (Goshtasby, 1995).
183
W. Rupniewski M..
Curve Reconstruction from Noisy and Unordered Samples.
DOI: 10.5220/0004814801830188
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 183-188
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

(a) (b)
Figure 1: A set D of noisy samples of an unknown curve (Subfig. 1(a)) and a reconstruction (solid line on Subfig. 1(b))
resulted from D.
2 PROBLEM STATEMENT
The aim is to recover a piece-wise smooth curve
γ ⊂ R
d
given a set of curve samples that are affected
by some noise. We will assume that the samples
are independent, i.e. that they form a set D of re-
alizations of identically distributed and independent
random variables with some probability density func-
tion f : R
d
→ R , which has its support located along
curve γ.
By recovering curve γ from set D we mean con-
structing a polygonal path (determined by the se-
quence of its vertices) that approximates γ. The qual-
ity of this approximation may be assessed by the
Hausdorff distance d between the polygonal path
ˆ
γ
and curve γ:
d(γ,
ˆ
γ) = max
max
p∈γ
min
q∈
ˆ
γ
kp − qk, max
p∈
ˆ
γ
min
q∈γ
kp − qk
.
Of course to perform such an assessment one needs
to know γ, which is rarely the case except for simula-
tions.
The quality of curve reconstruction depends upon
many factors:
• the number of samples n,
• their distribution along curve γ,
• the distribution of sample errors,
• the dimension d of the ambient space R
d
,
• the curvature of the curve.
In section 4, the quality of the reconstruction is stud-
ied in the case of uniform distribution of the samples
with respect to the arc length of the curve, normal
distribution of the sample errors and negligible cur-
vature.
3 ALGORITHM
The algorithm for curve reconstruction consists of
four steps (two of which are repeated in a loop) and is
presented in Fig. 2. The result of the algorithm is a set
E of pairs of the end-points of line segments compris-
ing a polygonal path approximating the curve.
Require: a non-empty set D ⊂ R
d
of noisy samples
of an unknown curve γ and a parameter R > 0
S ← choose(D, R)
repeat
S ← evolve(S, D, R)
S ← decimate(S, R)
until S is not affected by the last decimation
E ← order(S, R)
Figure 2: The algorithm for curve reconstruction.
3.1 Initialization
In the first step of the algorithm
S ← choose(D, R)
an initial set S of the path’s nodes is chosen. For
simplicity, we propose taking for S a randomly cho-
sen R-separated subset of the sample set D, where by
R-separated set we mean a set having no two different
points closer than R.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
184

3.2 Evolution
The heart of the curve reconstruction algorithm is the
evolution of the set S
S ← evolve(S, D, R).
The aim of the evolution is to move the points be-
longing to S towards the curve being reconstructed
and spread them along this curve. The evolution al-
gorithm is presented in Fig. 3.
repeat
Q ← S
S ← {avg(D∩ vcell(p, Q, R)) | p ∈ Q}
until Q = S
Figure 3: Function Q = evolve(S, D, R). avg(X) denotes the
mass centre of the points from X ⊂ R
d
.
In each step of the evolution, every node p ∈ S is
moved to the mass centre of the points from D falling
into the intersection vcell(p, S, R) of the ball of radius
R centered at p and the p’s cell of the Voronoi diagram
constructed for S, i.e.,
vcell(p, S, R) =
n
q ∈ R
d
|∀
o∈S
R ≥ kp − qk ≤ kp − ok
o
, (1)
where kxk denotes the Euclidean norm of x ∈ R
d
. In
Fig. 4 an example of the four-point node set is pre-
sented and the related intersections are depicted with
various gray levels.
1
2
3
4
Figure 4: The cells (see eq. (1)) constructed for a four-point
node set S. Each cell is the intersection of a ball centered at
a point, and this point’s Voronoi cell of the Voronoi diagram
constructed for S.
Moving a point towards the mass center of its
small circular neighbourhood accounts for conver-
gence towards the region of bigger mass density (we
assume that the closer is a point to the curve being
reconstructed, the bigger is the probability of hav-
ing a sample falling into the neighbourhood of the
point). Restricting the circular neighbourhoods to the
Voronoi cells prevents the points from concentrating
around single points of the curve.
while #S > 3 and there are points p ∈ S satisfying
condition (2) do
remove from S a randomly chosen point p satis-
fying (2)
end while
Figure 5: Function S ← decimate(S, R).
3.3 Decimation
The decimation step
S ← decimate(S, R)
of the algorithm is responsible for the reduction of the
number of points in S. Thus, it directly affects the rate
of convergence of the algorithm, the robustness of the
algorithm with respect to outliers, and the ability of
the algorithm to cope with curve self-intersections, its
end-points, and other singularities (in case there are
any).
In this paper, we present an algorithm for recon-
struction of smooth curves without self-intersections.
Therefore, we propose quite a simple decimation al-
gorithm presented in Fig. 5. In its formulation, the
statement that p ∈ S satisfies condition (2) means
that p has more than two other points from S in its
2R-neighbourhood or it has less than two other points
from S in its 4R-neighbourhood, i.e.,
#{q ∈ S|kp− qk ≤ 2R} > 3 or
#{q ∈ S|kp− qk ≤ 4R} < 3. (2)
3.4 Ordering
During the ordering step
E ← order(S, R)
the points belonging to set S are ordered so that two
consecutive points on the polygonal path are consec-
utive in sequence E. One can think of this stage as of
joining points of S with line segments in order to ob-
tain a polygonal path (open or closed). A line segment
may be represented with the set of its two end-points.
The algorithm for identifying all such segments is pre-
sented in Fig. 6. The algorithm is designed so that it
can produce more than one path in case the samples
origin from more than one curve.
4 SIMULATION
To asses the quality of the reconstruction algorithm
the following simulations were performed. Samples
CurveReconstructionfromNoisyandUnorderedSamples
185

E ← {{p, q} ⊂ S | p 6= q and kp − qk ≤ 2R}
while there are points p, q ∈ S such that each of
them appears in at most one pair comprising set E
and kp− qk ≤ 4R do
E ← E ∪
{p, q}
end while
Figure 6: Function E ← order(S, R).
of a line segment I = [0, 100] × {0} ⊂ R
2
were cho-
sen according to uniform distribution, and then they
were perturbed by standard normal deviates. Please
note that this is also a model for situation, in which
the original curve has some non-zero curvature but
the radius of this curvature is much bigger than the
standard deviation of the noise (locally, after proper
scaling, the curve looks like a line segment and the
deviates become standard). For various values of the
algorithm parameter R and for various number ρ of
samples per unit length line segment, the following
outputs of the algorithm were gathered:
• the median of the distances between the polygonal
path vertices and line segment I,
• the maximum of the distances between the polyg-
onal path vertices and line segment I,
• the bigger of the distances between the polygonal
path and the end-points of I.
The maximum of the latter two quantities forms the
Hausdorff distance between polygonal path and the
line segment being reconstructed. The experiments
were repeated 100 times for each set of parameters
in order to estimate the mean value and the quartiles
for the above quantities. The results are presented in
Fig. 8.
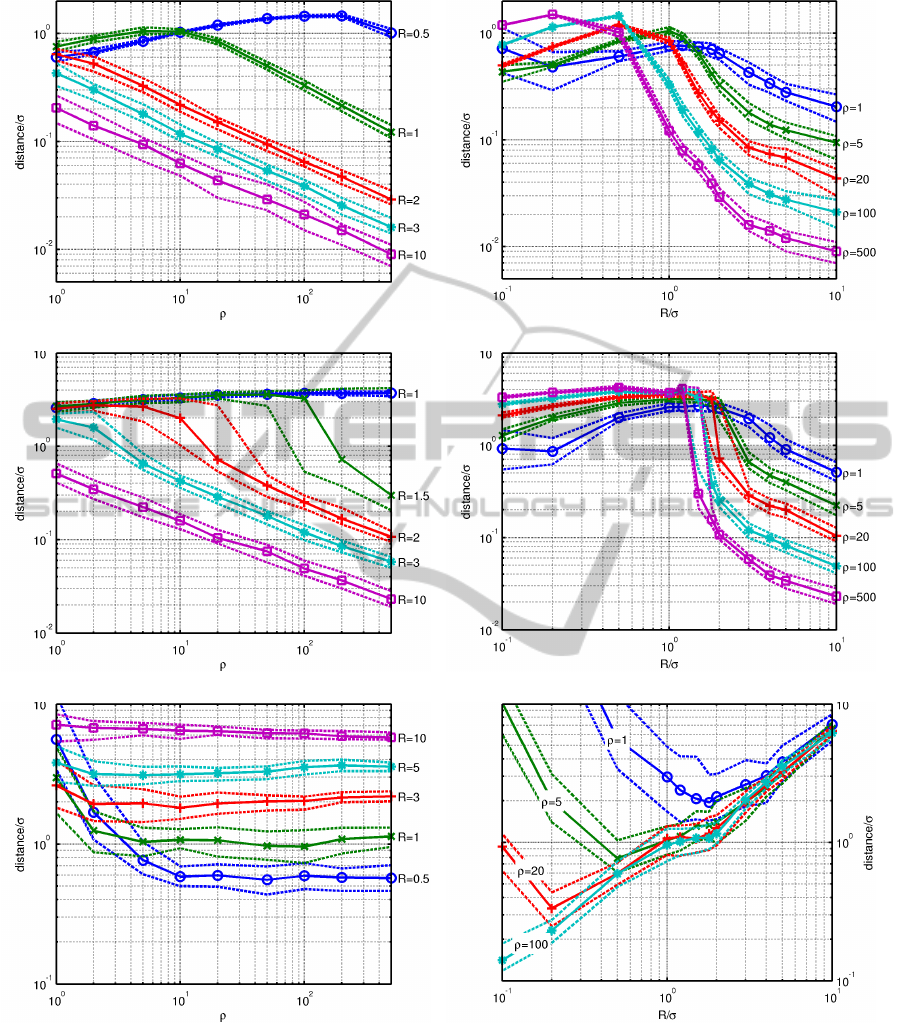
According to this figure, for a given number of
samples (per unit length curve segment) and the devi-
ation of the noise, the radius R should be neither too
small nor too big. The small values of R do not allow
points of S to evolve towards the segment, while the
big values of R results in worse approximation of the
end-points of the segment. We can also observe that
the distance between the polygonal path vertices and
the line segment decrease with the number of sam-
ples (this decrease is almost linear for big numbers of
samples), while the distance from these vertices to the
end-points of the segment tends to a non-zero value
that depends on parameter R.
4.1 Higher Dimensions
To verify that the algorithm produces desired results
for dimensions of the ambient space bigger than two,
another set of experiments was conducted. Samples
(a)
(b)
Figure 7: Results of reconstructions of a line segment ly-
ing in a d-dimensional space. Subfig. 7(a) shows estimated
quartiles and median distance between reconstructed polyg-
onal path vertices and the line segment. The median is de-
picted with a solid line, while the lower and the upper quar-
tiles are shown with the dashed lines. Subfig. 7(b) shows
estimates of the bigger of the two distances between an end-
point of the segment and the set of the path vertices. In the
both cases σ denotes the standard deviation of the normal
noise perturbing the samples.
of a line segment
I = [0, 100] × {0}
d−1
⊂ R
d
.
were perturbed by standard normal deviates. The pa-
rameter R of the reconstruction algorithm was fixed,
and a number of reconstructions were performed for
various values of the dimension d and various densi-
ties ρ of samples per unit length line segment. The
resulting characteristics are shown in Fig. 7.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
186
(a) (b)
(c) (d)
(e) (f)
Figure 8: Results of reconstructions of a line segment (lying in R
2
) from its samples disturbed by normal deviates with
standard deviation σ. ρ stands for mean number of samples per unit length line segment. In Subfig. 8(a) and 8(b) the estimated
median distance from polygonal path vertices to the segment is shown. In Subfig. 8(c) and 8(d) the estimated maximum of the
same distance is presented. The last two subfigures show estimates of the bigger of the two distances between an end-point
of the segment and the set of polygonal path vertices. In each figure, dashed lines show the lower and the upper estimated
quartiles for the corresponding (by color) quantity.
CurveReconstructionfromNoisyandUnorderedSamples
187

5 APPLICATION
The presented algorithm has been successfully used
for the purpose of air targets trajectory reconstruction
from radar raw data. The data comprised range bins
at which the recorded signal exceeded a given thresh-
old. The original data and the result of trajectory re-
construction are presented in Fig. 9.
Figure 9: Air target reconstruction from raw radar data (the
axes are scaled in kilometers; the right Figure was obtained
with the algorithm for R = 0.9km).
6 CONCLUSIONS
In this paper we have presented a novel algorithm for
the reconstruction of a curve from a cloud of its noisy
and unordered samples. One of the merits of the al-
gorithm is its simplicity – others include:
• no requirement of an initial guess for the recon-
structed curve,
• the curve end-points don’t need to be specified,
• it ambient space dimension is arbitrary,
• it works for both open and closed curves,
• it works for any number of disjoint curves.
The algorithm, in its presented form, does not cope
with intersecting curves well. Research is being un-
dertaken to improve it in this aspect. Also, we are
working on adapting the algorithm to anisotropic data
(e.g., location-time data points) and on automatic
adaptation of parameter R.
ACKNOWLEDGEMENTS
This work has been supported by the National Center
for Research and Development (NCBiR) under Grant
No. DOBR/0041/R/ID1/2012/03.
REFERENCES
Althaus, E. and Mehlhorn, K. (2001). Traveling salesman-
based curve reconstruction in polynomial time. SIAM
Journal on Computing, 31(1):27–66.
Cheng, S.-W., Funke, S., Golin, M., Kumar, P., Poon, S.-
H., and Ramos, E. (2005). Curve reconstruction from
noisy samples. Computational Geometry, 31(12):63 –
100.
Cohen, E. and O’Dell, C. (1989). A data dependent
parametrization for spline approximation. Mathemat-
ical Methods in Computer Aided Geometric Design,
pages 155–166.
Dey, T., Mehlhorn, K., and Ramos, E. (2000). Curve
reconstruction: Connecting dots with good reason.
Computational Geometry: Theory and Applications,
15(4):229–244.
Fang, L. and Gossard, D. C. (1995). Multidimensional
curve fitting to unorganized data points by nonlinear
minimization. Computer-Aided Design, 27(1):48 –
58.
Fritsch, F. and Carlson, R. (1980). Monotone piecewise
cubic interpolation. SIAM J. Numer. Anal., 17(2):238–
246.
Gold, C. and Snoeyink, J. (2001). A one-step crust and
skeleton extraction algorithm. Algorithmica (New
York), 30(2):144–163.
Goshtasby, A. (1995). Geometric modelling using rational
gaussian curves and surfaces. Computer-Aided De-
sign, 27(5):363 – 375.
Goshtasby, A. (2000). Grouping and parameterizing irreg-
ularly spaced points for curve fitting. ACM Transac-
tions on Graphics, 19(3):185–203.
Hastie, T. and Stuetzle, W. (1989). Principal curves. Journal
of the American Statistical Association, 84(406):502–
516.
H¨olzle, G. (1983). Knot placement for piecewise polyno-
mial approximation of curves. Computer-Aided De-
sign, 15(5):295–296.
Lee, I.-K. (2000). Curve reconstruction from unorga-
nized points. Computer Aided Geometric Design,
17(2):161–177.
Levin, D. (1998). The approximation power of mov-
ing least-squares. Mathematics of Computation,
67(224):1517–1531.
Pottmann, H. and Randrup, T. (1998). Rotational and he-
lical surface approximation for reverse engineering.
Computing (Vienna/New York), 60(4):307–322.
Ruiz, O. E., Cort´es, C., Aristiz´abal, M., Acosta, D. A., and
Vanegas, C. A. (2013). Parametric curve reconstruc-
tion from point clouds using minimization techniques.
In GRAPP/IVAPP, pages 35–48.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
188
