
A Probabilistic Implementation of Emotional BDI Agents
Jo
˜
ao Gluz and Patricia Jaques
PIPCA - UNISINOS, Av. Unisinos, 950, Bairro Cristo Rei, CEP 93.022-000, S
˜
ao Leopoldo, Brazil
Keywords:
BDI, Emotions, Appraisal, OCC.
Abstract:
A very well known reasoning model in Artificial Intelligence is the BDI (Belief-Desire-Intention). A BDI
agent should be able to choose the more rational action to be done with bounded resources and incomplete
knowledge in an acceptable time. Although humans need emotions in order to make immediate decisions
with incomplete information, traditional BDI models do not take into account affective states of the agent.
In this paper we present an implementation of the appraisal process of emotions in BDI agents using a BDI
language that integrates logic and probabilistic reasoning. Specifically, we implement the event-generated
emotions with consequences for self based on the OCC cognitive psychological theory of emotions. We also
present an illustrative scenario and its implementation. One original aspect of this work is that we implement
the emotions intensity using a probabilistic extension of a BDI language. This intensity is defined by the
desirability central value, as pointed by the OCC model. In this way, our implementation of an emotional BDI
allows to differentiate between emotions and affective reactions. This is an important aspect because emotions
tend to generate stronger response. Besides, the intensity of the emotion also determines the intensity of an
individual reaction.
1 INTRODUCTION
A very well known reasoning model in Artificial In-
telligence (AI) is the BDI (Belief-Desire-Intention).
It views the system as a rational agent having cer-
tain mental attitudes of belief, desire, intention, rep-
resenting, respectively, the informational, motiva-
tional and deliberative states of the agent (Rao and
Georgeff, 1995; Wooldridge, 2009). A rational agent
has bounded resources, limited understanding and in-
complete knowledge on what happens in the environ-
ment where it lives in. A BDI agent should be able
to choose the more rational action to be done with
bounded resources and incomplete knowledge in an
acceptable time.
Damasio (Damasio, 1994) showed that humans
need emotions in order to make immediate decisions
with incomplete information. BDI agents also need
to decide quickly and with incomplete data from the
environment. The BDI is a practical reasoning ar-
chitecture, that is reasoning directed towards action,
employed in the cases when the environment is not
fully observable (Russell and Norvig, 2010). How-
ever, most BDI models do not take into account the
agent’s emotional mental states in its process of deci-
sion making.
Among the several approaches of emotions - for
example, basic emotions (Ekman, 1992), dimensional
models (Plutchik, 1980), etc, the appraisal theory
(Scherer, 2000; Scherer, 1999; Moors et al., 2013)
appears to be the most appropriate to implement emo-
tions into BDI agents. According to this theory, emo-
tions are elicited by a cognitive process of evaluation
called appraisal. The appraisal depends of one’s goals
and values. These goals and values can be represented
as the BDI agents’ goals and beliefs. In this way, it is
possible to make a direct relation between BDI agents
goals and beliefs and appraisals.
When addressing emotional mental states in BDI
agents, several research questions should be ad-
dressed. An important issue is how to represent and
implement the emotional appraisal, the emotions and
its properties, such as, intensity. This is a first step
before representing how emotions can interfere back
in the cognitive processes of the agent, such as deci-
sion making. When addressing emotions, we should
take into account the emotions intensity, since it de-
fines when an emotion will occur or not. When an af-
fective reaction does not achieve a sufficient intensity
threshold, it will not be experienced as an emotion.
The formal logical BDI approach is not appropri-
ate to represent the emotions intensity because it does
not allow to represent imprecise data. This is the rea-
son because most emotional BDI models do not take
121
Gluz J. and Jaques P..
A Probabilistic Implementation of Emotional BDI Agents.
DOI: 10.5220/0004815501210129
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 121-129
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

into account the notion of emotion intensity (Jiang
et al., 2007; Van Dyke Parunak et al., 2006; Adam
et al., 2009). In order to represent the emotions in-
tensity, we use AgentSpeak(PL) BDI language (Silva
and Gluz, 2011). AgentSpeak(PL) is a new agent pro-
gramming language, which integrates BDI and prob-
abilistic reasoning, i. e., bayesian networks.
This article presents an implementation of the
emotional appraisal into BDI agents. We are inter-
ested in the implementation of emotions and their
intensity using a language that integrates BDI and
Bayesian reasoning. Unlike other works, as we use a
probabilistic extension of the BDI model that is able
to represent the intensity of the affective reactions,
our work is able to differentiate between emotions and
other affective states with low intensity. Besides, the
intensity of the emotion also determines how strong
is the response of an individual (Scherer, 2000).
In this paper, we focus on the event-generated
emotions, i. e., emotions that are elicited by the eval-
uation of the consequences of an event for the accom-
plishment of a person’s goals. We do not formalize
emotions in which their appraisal evaluate the con-
sequences for others, such as resentment, pity, gloat-
ing and happy-for. We chose to implement the event-
generated emotions with consequences for self, since
these emotions seems to be the most important in the
decision making process (Bagozzi et al., 2003; Isen
and Patrick, 1983; Raghunathan and Pham, 1999).
This paper is organized as follow. Section 2
presents the OCC model, the psychological emotional
model that grounds our work. In Section 3, we de-
scribe the AgentSpeak(PL), a language that integrates
BDI and Bayesian Decision Network to reason about
imprecise data. Section 4 compares the proposed
work with related works and highlights its main con-
tribution. In Section 5, we cite a scenario and its im-
plementation with AgentSpeak (PL) to illustrate how
it can be used to implement emotional probabilistic
BDI agents. Finally, in Section 6, we present some
conclusions.
2 THE OCC MODEL
This work proposes an extension of the BDI model
to integrate emotions. We intend to implement the
appraisal process of emotions into BDI agents. We
implemented the appraisal process according to the
OCC model (Ortony et al., 1990) and using proba-
bilistic reasoning to represent emotions intensity.
According to the cognitive view of emotions
(Scherer, 1999), emotions appear as a result of an
evaluation process called appraisal. The central idea
of the appraisal theory is that “the emotions are
elicited and differentiated on the basis of a person’s
subjective evaluation (or appraisal) of the personal
significance of a situation, event or object on a num-
ber of dimensions or criteria” (Scherer, 1999).
Ortony, Clore and Collins (Ortony et al., 1990)
constructed a cognitive model of emotion, called
OCC, which explains the origins of 22 emotions by
describing the appraisal of each one. For example,
hope appears when a person develops an expectation
that some good event will happen in the future.
The OCC model assumes that emotions can arise
by the evaluation of three aspects of the world: events,
agents, or objects. Events are the way that people
perceive things that happen. Agents can be people,
biological animals, inanimate objects or abstractions
such as institutions. Objects are objects viewed qua
objects. There are three kinds of value structures un-
derlying perceptions of goodness and badness: goals,
standards, and attitudes. The events are evaluated in
terms of their desirability, if they promote or thwart
one’s goals and preferences. Standards are used to
evaluate actions of an agent according to their obe-
dience to social, moral, or behavioural standards or
norms. Finally, the objects are evaluated as appeal-
ing depending on the compatibility of their attributes
with one’s tastes and attitudes. In this paper we refer
to the emotions that are generated from the evaluation
of an event consequences according to one’s goals as
event-generated emotions.
The elicitation of an emotion depends on a per-
son’s perception of the world – his construal. If an
emotion such as distress is a reaction to some unde-
sirable event, the event must be construed as unde-
sirable. For example, when one observes the reac-
tions of players at the outcome of an important game,
it is clear that those on the winning team are elated
while those on the losing team are devastated. In a
real sense, both the winners and losers are reacting to
the same objective event. It is their construal of the
event that is different. The winners construe it as de-
sirable, while the others construe it as undesirable. It
is this construal that drives the emotion system.
A central idea of the model is the type of an emo-
tion. An emotion type is a distinct kind of emotion
that can be realized in a variety of recognizably re-
lated forms and which are differentiated by their in-
tensity. For example, fear is an emotion type that can
be manifested in varying degrees of intensity, such as
“concern” (less afraid), “frightened”, and “petrified”
(more afraid). The use of emotion type has the goal of
being language-neutral so that the theory is universal,
independent of culture. Instead of defining an emo-
tion by using English words (the author’s language),
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
122
the emotions are characterized by their eliciting con-
ditions.
In the OCC model, the emotions are also grouped
according to their eliciting conditions. For example,
the “attribution group” contains four emotion types,
each of which depends on whether the attribution of
responsibility to some agent for some action is posi-
tive or negative, and on whether the agent is the self
or another person.
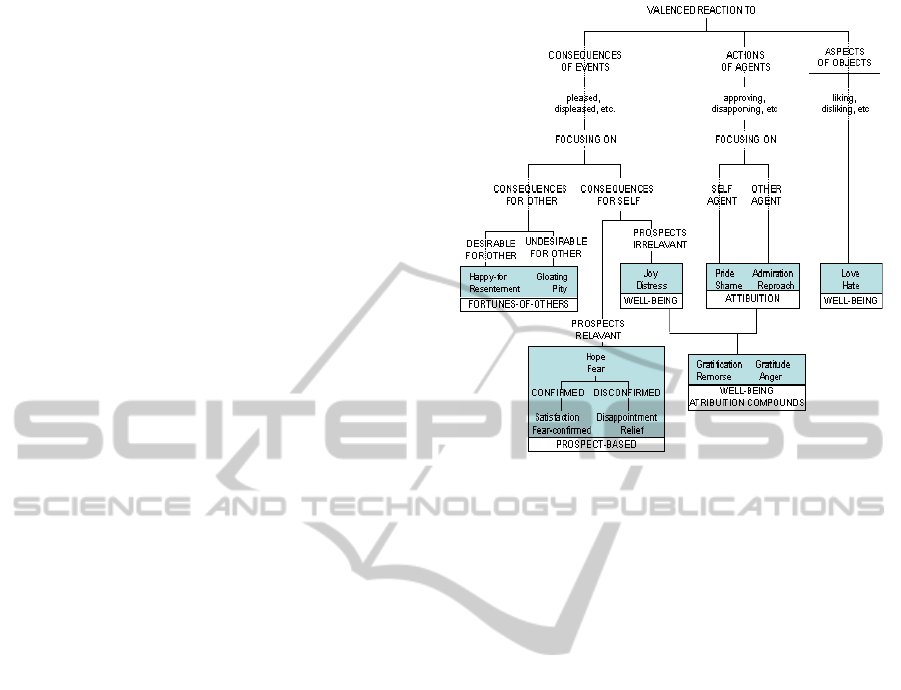
The OCC model is illustrated in Figure 1. When
goals are the source, one may feel pleased if the event
is desirable, or displeased if it is not. Which spe-
cific emotion arises depends on whether the conse-
quences are for other or for oneself. When concerned
for oneself (label as CONSEQUENCES FOR SELF),
the evaluation depends on whether the outcomes are
past (label as PROSPECTS IRRELEVANT), like joy
and distress, or prospective (label as PROSPECTS
RELEVANT), such as hope and fear. If the prospect
is confirmed or not, other four emotions may arise,
such as satisfaction, disappointment, fear-confirmed
and relief. When concern for other (label as CON-
SEQUENCES FOR OTHER), the outcomes are eval-
uated according to when they are undesirable (label
as UNDESIRABLE FOR OTHER), such as gloating
and pity, or desirable for other (label as DESIRABLE
FOR OTHER), such as happy-for, resentment.
When the actions of agents are evaluated accord-
ing to standards, affective reactions of approval or
disapproval arise. The specific emotions depend on
whether the action is one’s own (labelled as SELF
AGENT), such as pride and shame; or someone else’s
(labelled as OTHER AGENT), such as admiration and
reproach.
The aspects of an object are evaluated according to
one’s tastes, if one likes or dislikes. In this case, emo-
tions such as love and hate may arise. Finally, emo-
tions like anger and gratitude involve a joint focus on
both goals and standards at the same time. For exam-
ple, one’s level of anger depends on how undesirable
the outcomes of events are and how blameworthy the
related actions are.
According to the OCC model, affective reactions
are effectively experienced as emotions only if they
achieve a minimum intensity degree. Before this,
these affective reactions have only a potential for the
emotion. But, after this potential surpasses the mini-
mum threshold necessary for an emotion, the emotion
starts to be felt.
The OCC authors believe that this model when
implemented in a machine can help to understand
what emotions people experience under what condi-
tions. According to them, it is not the objective of
the OCC model to implement machine with emotions,
Figure 1: Global Structure of Emotion Types - OCC Model
(Ortony et al., 1990).
but to be able to predict and explain human cogni-
tions related to emotions. However, Picard (Picard,
2000) disagrees and believes that the OCC model can
be used for emotion synthesis in machines. In fact, in
computing science research, there already are several
works that use OCC in order to implement emotions
in machine (Gebhard, 2005; Dias and Paiva, 2013;
Jaques et al., 2011; Signoretti et al., 2011).
The OCC authors also agree that this model is
a highly oversimplified vision of human’s emotions,
since in reality a person is likely to experience a mix-
ture of emotions (Ortony et al., 1990). Otherwise, in
order to understand which set of emotions is a per-
son or agent experiencing, we must first try to iden-
tify each emotion separately. This is the case of the
approach adopted in the proposed work and in great
part of the emotion synthesis research.
3 A HYBRID BDN+BDI MODEL
The BDI model was based on the works of Searle
and Dennet, posteriorly generalized by the philoso-
pher Michael Bratman (Bratman, 1990), which gave
particular attention to the role of intentions in reason-
ing (Wooldridge, 1999). The BDI approach views the
system as a rational agent having certain mental atti-
tudes of belief, desire, intention, representing, respec-
tively, the information, motivational and deliberative
states of the agent (Rao and Georgeff, 1995). A ratio-
nal agent has bounded resources, limited understand-
AProbabilisticImplementationofEmotionalBDIAgents
123

ing and incomplete knowledge on what happens in the
environment it lives in.
The beliefs represent the information about the
state of the environment that is updated appropriately
after each sensing action. Desires are the motivational
state of the system. They have information about the
objectives to be accomplished, i. e. what priorities or
pay-offs are associated with the various current objec-
tives. They represent a situation that the agent wants
to achieve. The fact that the agent has a desire does
not mean that the agent will do it. The agent carries
out a deliberative process in which it confronts its de-
sires and beliefs and chooses a set of desires that can
be satisfied. An intention is a desire that was chosen
to be executed by a plan, because it can be carried out
according to the agents beliefs (it is not rational an
agent carries out something that it does not believe).
Plans are pre-compiled procedures that depend on a
set of conditions for being applicable. The desires
can be contradictory to each other, but the intentions
cannot (Wooldridge, 1999). Intentions represent the
goals of the agent, defining the chosen course of ac-
tion. An agent will not give up on its intentions – they
will persist, until the agent believes it has success-
fully achieved them, it believes it cannot achieve them
or because the purpose of the intention is no longer
present.
In the BDI model, a belief is defined as a two-
state logical proposition: or the agent believes that
a certain event is true or it believes that the event is
false. Today, programming languages and tools avail-
able for development BDI agents do not work with the
concept of probabilistic beliefs (Bordini et al., 2005),
i.e. they do not allow agents to understand, infer or
represent degrees of belief (or degrees of uncertainty)
about a given proposition. A degree of belief is de-
fined by the subjective probability assigned to a par-
ticular belief.
The concept of Bayesian Networks (BN) (Pearl,
1988) fits in this scenario, allowing to model the prob-
abilistic beliefs of some agent. BN alone are excellent
tools to represent probabilistic models of agents, but,
with the addition of utility, and decision nodes, it is
possible to use the full spectrum of Decision Theory
to model agent’s behaviour. BN extended with util-
ity, and decision nodes, are called Bayesian Decision
Networks (BDN) (Russell and Norvig, 2010).
The integration between the current agent pro-
gramming languages and the concept of belief prob-
abilities can be approached in several ways and at
different levels of abstraction. In practical terms, it
is possible to make an ad-hoc junction of both kind
of models in the actual programming code of the
agents. Both BDI and BDN agent programming en-
vironments rely on libraries and development frame-
works, with a standard Application Programming In-
terface (API). Thus, a hybrid agent can be designed
and implemented by combining calls from different
sets of APIs, each one from distinct programming en-
vironments. The more abstract level to address this
issue of integration is usually treated by Probabilistic
Logics (Korb and Nicholson, 2003). Although Prob-
abilistic Logics have the ability to represent both log-
ical beliefs and probabilistic beliefs, there are notori-
ous problems related to the tractability of the result-
ing models (Korb and Nicholson, 2003). Another ap-
proach is to extend logic programming languages (es-
sentially Prolog) to handle probabilistic concepts. P-
Log (Baral and Hunsaker, 2007) and PEL (Milch and
Koller, 2000) fit in this category. They offer interest-
ing ideas, but they lack the full integration with BDI
programming languages, like AgentSpeak(L) (Bor-
dini et al., 2007).
In the present work we consider a programming
approach that fully integrates the theoretical and prac-
tical aspects of BDN and BDI models. We use
AgentSpeak(PL) (Silva and Gluz, 2011) to imple-
ment a probabilistic process, for the appraisal of
(some of) the OCC’s emotions. AgentSpeak(PL) is
a new agent programming language, which is able to
support BDN representation and inference in a seam-
less integrated model of beliefs and plans of an agent.
AgentSpeak(PL) is based on the language AgentS-
peak(L) (Bordini et al., 2007), inheriting from it all
BDI programming concepts. AgentSpeak(PL) is sup-
ported by JasonBayes (Silva and Gluz, 2011), an ex-
tension of the Jason (Bordini et al., 2007) agent devel-
opment environment. The main changes of AgentS-
peak(PL), in respect to AgentSpeak(L), were:
• Inclusion of a probabilistic decision model of the
agent, consisting of the specification of a BDN.
• Inclusion of events/triggers based on probabilistic
beliefs.
• Inclusion of achievement and test goals, based on
probabilistic beliefs.
• Inclusion of actions, which are able to update the
probabilistic model.
4 RELATED WORK
There are other researchers that have also been work-
ing in the extension of the BDI architecture in or-
der to incorporate emotions. (Jiang et al., 2007) de-
fines an extension of the generic architecture of BDI
agents that introduces emotions. However, this work
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
124

explores the possible influences of emotions to de-
termine agents’ beliefs and intentions. (Van Dyke
Parunak et al., 2006) propose an extension of the BDI
model to integrate emotions, which is based on the
OCC model. In this model, the agent’s beliefs inter-
fere in its appraisal, which will determine its emo-
tions. The emotions, on the other hand, interfere in
the choice of intentions. This work is focussed on the
impact of the emotions in agent’s choice of intentions
from desires. Other related works are the ones pro-
posed by (Adam et al., 2009) and (Steunebrink et al.,
2012; Steunebrink et al., 2008). Both works present a
purely logical formalization of the OCC model. They
are theoretical works that use a BDI modal logic to
describe the OCC’s appraisal. They do not show how
to create an operational computing model based on
the logical formalization.
All the above cited related works do not use a
probabilistic model to represent the intensity of the
emotions. Their model is not able to represent if the
potential of an affective reaction in the appraisal pro-
cess achieved the necessary threshold to elicit an emo-
tion. In these works, when the appraisal process oc-
curs, an agent always has an emotion. This is not
the case, because an emotion only occurs when the
intensity achieves a specific threshold (Ortony et al.,
1990). To differentiate emotions from other affective
reactions is important because emotions tend to gen-
erate stronger response. Besides, the intensity of the
emotion also determines how strong is the response
of an individual (Scherer, 2000).
5 A SCENARIO
Let us present a scenario in order to illustrate the pro-
cess of appraisal that happens with an agent, which
has an emotional BDI+BDN architecture. Let us con-
sider a vacuum cleaner robot example, with its envi-
ronment of a grid with two cells. Besides the desires
to work and clean the environment, our agent, whose
name is Vicky, also has the desire of protecting its
own existence with a stronger priority.
While Vicky is cleaning Cell B, Nick, a clumsy re-
searcher who also works at the same laboratory, goes
towards Vicky without noticing it. When Vicky per-
ceives that Nick is going to stomp on itself, the de-
sire of self-protection becomes an intention and Vicky
feels fear of being damaged.
In order to alert the awkward scientist, Vicky
emits an audible alarm. Nick perceives Vicky (almost
behind his feet) and step on the other cell, avoiding
trample over Vicky. When Vicky perceives that it is
not in danger any more, finally, it feels relief. It can
continue to do its work; at least while Nick does not
decide to come back to his office.
In the next section we present how the pro-
cess of emotion appraisal, with the correspond-
ing behaviour consequences, can be implemented in
AgentSpeak(PL), and how this process will evolve in
the the first reasoning cycles of the agent.
5.1 AgentSpeak(PL) Implementation
Emotions in the OCC model depend on several cog-
nitive variables, related to the mental state of the
agent. These variables are instrumental in the pro-
cess of emotion’s arousal, because they determine the
intensity of the emotions. Not all affective reactions
(evaluation of an event as un/desirable) are necessar-
ily emotions: “Whether or not these affective reac-
tions are experienced as emotions depends upon how
intense they are” (Ortony et al., 1990, p. 20).
The OCC model divides these variables in central
variables, like desirability, and local variables, like ef-
fort. For our formal model, we need to define the de-
sirability and undesirability central variables because
these variables are important to event-generated emo-
tions.
Desirabilities are not utilities. From an ontologi-
cal perspective they are based on distinct things: the
prospective gains of some event in respect to the sub-
jective value of agent goals versus the functional rep-
resentation of rational preferences for states of the
world. However, from a purely formal point of view,
it is possible to use utilities to estimate the value of
the desirability. If we consider a subjective model for
the state of the world, then it is possible to assume
that utilities (as a kind of evaluation) could enter in
the formation of the desirability. The desirability of
some event could be calculated as the difference be-
tween the utility of the state of the world previous to
the occurrence of the event, and the utility after this
event happens, as hypothesized by the agent.
Using this interpretation, it is possible to apply a
tool like a Bayesian Decision Network (BDN) (Rus-
sell and Norvig, 2010) to make subjective (bayesian)
probabilistic model of the states of the world, and to
associate utilities to these states to estimate the desir-
ability. The BDN diagram shown in Figure 2 repre-
sents Vicky’s probabilistic model about the desirabil-
ity of smashed and dirty events.
The tables presented in Table 1 define the prior
and conditional probabilities, as well as the utility of
this probabilistic model. These tables provide esti-
mations of how good is to work and to continue to
exist. They can also be used to estimate how much
the fact of finding dirt will advance cleaning and self-
AProbabilisticImplementationofEmotionalBDIAgents
125
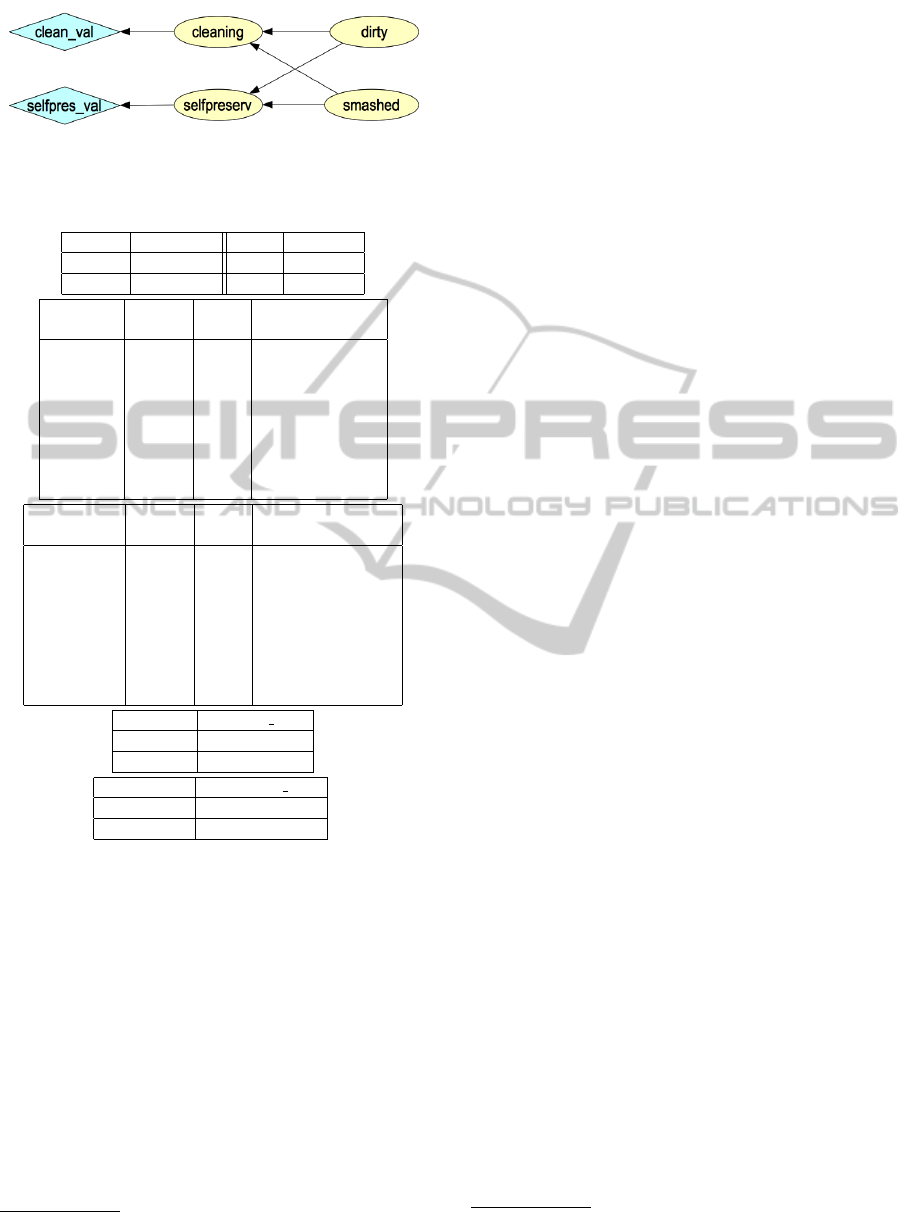
Figure 2: A BDN representing Vicky’s probabilistic model
about desirability of events.
Table 1: Probability tables for Vicky’s BDN model.
smash P(smash) dirty P(dirty)
true 0.5 true 0.5
false 0.5 false 0.5
cleaning smash dirty P(cleaning |
dirty & smash)
true true true 0.0
true true false 0.0
true false true 0.9
true false false 0.2
false true true 1.0
false true false 1.0
false false true 0.1
false false false 0.8
selfpreserv smash dirty P(selfpreserv
| dirty & smash )
true true true 0.1
true true false 0.1
true false true 1.0
true false false 1.0
false true true 0.9
false true false 0.9
false false true 0.0
false false false 0.0
cleaning U(clean val)
true 80
false 0
selfpreserv U(selfpres val)
true 100
false 0
preservation goals. Together with the knowledge that
any smashing will severely hinder the agent’s goals,
this model will allow Vicky to estimate the desirabil-
ity of cleaning and if it feels joy or fear.
Now, using an appropriate agent programming
language, it is a relatively straightforward task to pro-
gram Vicky’s beliefs, emotions, intentions, and plans.
To do so, we will use AgentSpeak(PL) (Silva and
Gluz, 2011), which generalizes AgentSpeak(L), al-
lowing a seamless integration of bayesian decision
model in the BDI planning process.
An AgentSpeak(PL) source code contains a BDN
model, the non-probabilistic beliefs, the agent’s goals,
and its corresponding plans. Figure 3 shows the
source code
1
for the BDN presented in Figure 2.
1
This code can be programmed by hand, or it can be
automatically generated from a graphical model similar to
// Probabilistic model
// Prior probabilities - standard syntax
%dirty(true) = 0.5.
%dirty(false) = 0.5.
// Prior probabilities - compact syntax
%smash(true,false) = [0.5, 0.5].
// Conditional probabilities - standard syntax
%cleaning(true) | smash(true) & dirty(true) = 0.0 .
%cleaning(true) | smash(true) & dirty(false) = 0.0 .
%cleaning(true) | smash(false) & dirty(true) = 0.9 .
%cleaning(true) | smash(false) & dirty(false) = 0.2.
%cleaning(false) | smash(true) & dirty(true) = 1.0.
%cleaning(false) | smash(true) & dirty(false) = 1.0.
%cleaning(false) | smash(false) & dirty(true) = 0.1.
%cleaning(false) | smash(false) & dirty(false)= 0.8.
// Conditional probabilities - compact syntax
%selfpreserving(true,false) | smash & dirty =
[0.1, 0.1, 1.0, 1.0, 0.9, 0.9, 0.0, 0.0].
// Utility function - standard syntax
$clean_val | cleaning(true) = 80.0 .
$clean_val | cleaning(false) = 0.0 .
// Utility function - compact syntax
$selfpres_val | selfpreserv = [100.0, 0.0].
Figure 3: Vicky’s BDN model programmed in AgentS-
peak(PL).
min_joy(50). min_distress(-100).
located(cell_b).
!cleaning.
!selfpreserv.
+dirty <-
+perceived(dirty); +!cleaning.
+human_fast_approx <-
+prospect(smash); +selfpreserv.
+human_fast_depart <-
-prospect(smash).
Figure 4: Vicky’s initial beliefs, goals, and perception plans.
Vicky’s initial non-probabilistic beliefs, its pri-
mary goals, and the plans to handle its perceptions
are defined in Figure 4. Initially, as the battery energy
level of Vicky is high and it is located in a dirty cell
(cell B), Vicky selects the goal “clean the cell” as an
intention. We can also expect that Vicky has also a ba-
sic self-preservation instinct, i. e., it has the intention
of preserving its own existence. The perception plans
start intentions about what to do if some event is per-
ceived, incorporating the common sense knowledge
of Vicky about what happens when dirt is detected or
when some human is approximating fast.
The planning knowledge of Vicky, in respect to
what to do in its operation cycles, is relatively simple
and can be specified by the set of AgeentSpeak(PL)
plans defined in Figure 5. The only small issue is that
in AgentSpeak(PL) it is necessary to start goals and
plans to calculate the desirability of events. This is
the BDN presented in Figure 2 (see (Silva and Gluz, 2011)
for details).
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
126

+!cleaning : perceived(dirty) ->
+dirty(true);
!joy_inten(dirty,JI); JI > 0;
!fear_inten(smash,FI); FI = 0;
.cleaning_action.
+!selfpreserv : expect(smash) <-
!fear_inten(smash,FI);FI > 0;
.alarm_action.
Figure 5: Vicky’s plans for cleaning, and self preservation
intentions.
due to how the marginal probabilities and the utility
values of the BDN model are calculated: whenever
some evidence is added to the beliefs of the agent, the
bayesian inference engine is activated and all proba-
bilities and utilities are recalculated. An evidence is
simply a non-probabilistic belief, like dirty(true)
or smashed(false), that are identical in name to
some variable (node) of the BDN model.
Vicky’s code is completed by the plans to detect
if it feels some joy, or fear, presented in the Fig-
ure 6. These plans implement the rule-based com-
putational model for these emotions, as presented in
(Ortony et al., 1990, p. 182-186), defining operational
functions to estimate the potential and the intensity of
these emotions.
5.2 First Reasoning Cycle
Initially, as the battery energy level of Vicky is high
and it is located in a dirty cell (cell B), Vicky selects
the goal “clean the cell” as an intention. We can also
expect that Vicky has also a basic self-preservation
instinct, i. e., it has the intention of preserving its own
existence.
In the first cycle, when dirt is found, but not
smashing event expected, then the variable U1 in
joy poten(dirty,JP) plan will give the utility if
it is assumed that dirt is found. The value of
U1 will be 172, with the utility function returning:
$(clean val) = 72, and $(selfpres val)=100.
The variable U2 will give the utility, if we assume that
dirt is not found. Its value is 116, with $(clean val)
= 16, and $(selfpres val)=100. The difference JP
will be 56. With this value for the potential of joy,
then joy inten(dirty,JI) plan will return JI=6,
indicating that Vicky is feeling joy.
5.3 Second Reasoning Cycle
In the second cycle, while it is cleaning, Vicky re-
ceives from its vision sensor the perception “Human
fast approximation”. Vicky also knows that human
approximation can damage a robot, because the hu-
+!joy_poten(dirty,JP): not dirty(true) <-
J = 0.
+!joy_poten(dirty,JP): dirty(true) <-
U1 = $(clean_val) + $(selfpres_val);
-+dirty(true);
U2 = $(clean_val) + $(selfpres_val);
-+dirty(true);
JP = U1 - U2.
+!joy_inten(dirty,JI) <-
!joy_poten(dirty,JP); ?min_joy(MJ);
if (JP>MJ) {JI = JP - MJ} else {JI = 0}.
+!fear_poten(smash,J): not expected(smash) <-
J = 0.
+!fear_poten(smash,J): prospect(smash) <-
+smash(true),
U1 = $(clean_val) + $(selfpres_val);
-+smash(false);
U2 = $(clean_val) + $(selfpres_val);
-smash(false);
F = U2 - U1.
+!fear_inten(dirty,FI) <-
!fear_poten(smash,FP); ?min_fear(MF);
if (FP>MF) {FI = FP - MF} else {FI = 0}.
Figure 6: Vicky’s plans to estimate its joy, and fear emo-
tions.
man can trample the robot. It learned that from a pre-
vious bad-succeed experience with Nick.
In the second cycle, a similar situation
occurs, but this time the variable U1 in the
fear poten(smash,FP) plan, which estimates
the utility of some smashing occurs, will be 10, with
$(clean val) = 0, and $(selfpres val)=10. The
value of U2 in the same plan will be 172, giving an
estimation of 162 for FP, the undesirability of being
smashed. Then, fear inten(dirty,FI) plan will
return FI=62, indicating that Vicky has fear.
6 CONCLUSIONS
In this paper we presented an implementation of the
appraisal process of emotions in BDI agents using a
BDI language that integrates logic and probabilistic
reasoning. Specifically, we implemented the event-
generated emotions with consequences for self based
on the OCC cognitive psychological theory of emo-
tions. We also presented an illustrative scenario and
its implementation.
One original aspect of this work is that we im-
plemented the emotions intensity using a probabilistic
extension of a BDI language, called AgentSpeak(PL).
This intensity is defined by the desirability central
value, as pointed by the OCC model. In this way, our
implementation of emotional BDI allows to differen-
tiate between emotions and affective reactions. This
AProbabilisticImplementationofEmotionalBDIAgents
127

is an important aspect because emotions tend to gen-
erate stronger response. Besides, the intensity of the
emotion also determines how strong is the response
of an individual (Scherer, 2000).
We are aware that the implementation of the ap-
praisal of emotions is only a first step. An emotional
BDI implementation should address other important
dynamic processes between emotions and the mental
states of desires, intentions and beliefs in the BDI ar-
chitecture. As the BDI is a practical reasoning archi-
tecture, that is reasoning towards action (Wooldridge,
1999), it is important to discuss how the use of emo-
tions can help the agent to choose the most rational ac-
tion to be done and how the emotions can improve the
way that an agent reasons or decides or acts. These
are open questions that we intend to address in a fu-
ture work. However, we believe that the implementa-
tion of the appraisal and the arousal of an emotion de-
pending on the intensity of the affective reaction, pre-
sented in this paper, is an important and initial point
since the appraisal evaluation explains the origin of an
emotion and also differentiates them (Scherer, 1999).
ACKNOWLEDGEMENTS
This work is supported by the following re-
search funding agencies of Brazil: CAPES, CNPq,
FAPERGS and CTIC/RNP.
REFERENCES
Adam, C., Herzig, A., and Longin, D. (2009). A logical for-
malization of the OCC theory of emotions. Synthese,
168(2):201–248.
Bagozzi, R. P., Dholakia, U. M., and Basuroy, S. (2003).
How effortful decisions get enacted: the motivating
role of decision processes, desires, and anticipated
emotions. Journal of Behavioral Decision Making,
16(4):273–295.
Baral, C. and Hunsaker, M. (2007). Using the probabilis-
tic logic programming language p-log for causal and
counterfactual reasoning and non-naive conditioning.
In Proceedings of the 20th international joint confer-
ence on Artifical intelligence, IJCAI’07, pages 243–
249, San Francisco, CA, USA. Morgan Kaufmann
Publishers Inc.
Bordini, R. H., Dastani, M., Dix, J., and Seghrouchni, A.
E. F. (2005). Multi-agent programming : languages,
platforms and applications., volume 15 of Multiagent
systems, artificial societies, and simulated organiza-
tions. Springer, New York.
Bordini, R. H., H
¨
ubner, J. F., and Wooldridge, M. (2007).
Programming Multi-Agent Systems in AgentSpeak us-
ing Jason (Wiley Series in Agent Technology). John
Wiley & Sons.
Bratman, M. (1990). What is intention? In Cohen, P. R.,
Morgan, J. L., and Pollack, M. E., editors, Intentions
in Communications, Bradford books, pages 15–31.
MIT Press, Cambridge.
Damasio, A. R. (1994). Descartes’ error : emotion, reason,
and the human brain. G.P. Putnam New York.
Dias, J. a. and Paiva, A. (2013). I want to be your
friend: establishing relations with emotionally intel-
ligent agents. In Proceedings of the 2013 interna-
tional conference on Autonomous agents and multi-
agent systems, AAMAS ’13, pages 777–784, Rich-
land, SC. IFMAS.
Ekman, P. (1992). An argument for basic emotions. Cogni-
tion & Emotion, 6(3-4):169–200.
Gebhard, P. (2005). Alma: a layered model of affect. In
Proceedings of the fourth international joint confer-
ence on Autonomous agents and multiagent systems,
AAMAS ’05, pages 29–36, New York, NY, USA.
ACM.
Isen, A. M. and Patrick, R. (1983). The effect of positive
feelings on risk taking: When the chips are down.
Organizational Behavior and Human Performance,
31(2):194–202.
Jaques, P. A., Vicari, R., Pesty, S., and Martin, J.-C.
(2011). Evaluating a Cognitive-Based Affective Stu-
dent Model. In D’Mello, S. K., Graesser, A. C.,
Schuller, B., and Martin, J.-C., editors, International
Conference on Affective Computing and Intelligent In-
teraction (ACII), volume 6974 of Lecture Notes in
Computer Science, pages 599–608. Springer.
Jiang, H., Vidal, J., and Huhns, M. N. (2007). International
Conference On Autonomous Agents. ACM, New York.
Korb, K. and Nicholson, A. (2003). Bayesian Artificial In-
telligence. Chapman & Hall/CRC Computer Science
& Data Analysis. Taylor & Francis.
Milch, B. and Koller, D. (2000). Probabilistic models for
agents’ beliefs and decisions. In Proceedings of the
Sixteenth conference on Uncertainty in artificial intel-
ligence, UAI’00, pages 389–396, San Francisco, CA,
USA. Morgan Kaufmann Publishers Inc.
Moors, A., Ellsworth, P. C., Scherer, K. R., and Frijda,
N. H. (2013). Appraisal Theories of Emotion: State
of the Art and Future Development. Emotion Review,
5(2):119–124.
Ortony, A., Clore, G. L., and Collins, A. (1990). The Cog-
nitive Structure of Emotions. Cambridge University
Press.
Pearl, J. (1988). Probabilistic reasoning in intelligent sys-
tems: networks of plausible inference. Morgan Kauf-
mann Publishers Inc., San Francisco, CA, USA.
Picard, R. W. (2000). Affective Computing. University Press
Group Limited.
Plutchik, R. (1980). A general psychoevolutionary theory of
emotion. Emotion: Theory, research, and experience,
1(3):3–33.
Raghunathan, R. and Pham, M. T. (1999). All negative
moods are not equal: Motivational influences of anx-
iety and sadness on decision making. Organizational
Behavior and Human Decision Processes, 79(1):56–
77.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
128

Rao, A. S. and Georgeff, M. (1995). BDI Agents: from
Theory to Practice. Technical Report Technical Note
56, Melbourne, Australia.
Russell, S. J. and Norvig, P. (2010). Artificial Intelligence:
A Modern Approach. Prentice Hall Series in Artificial
Intelligence. Pearson Education/Prentice Hall.
Scherer, K. R. (1999). Appraisal theory. In Dalgleish, T.
and Power, M., editors, Handbook of Cognition and
Emotion, volume 19, chapter 30, pages 637–663. John
Wiley & Sons Ltd.
Scherer, K. R. (2000). Psychological models of emotion.
In Borod, J., editor, The neuropsychology of emotion,
volume 137 of The neuropsychology of emotion, chap-
ter 6, pages 137–162. Oxford University Press.
Signoretti, A., Feitosa, A., Campos, A. M., Canuto, A. M.,
Xavier-Junior, J. C., and Fialho, S. V. (2011). Using
an affective attention focus for improving the reason-
ing process and behavior of intelligent agents. In Pro-
ceedings of the 2011 IEEE/WIC/ACM International
Conferences on Web Intelligence and Intelligent Agent
Technology - Volume 02, WI-IAT ’11, pages 97–100,
Washington, DC, USA. IEEE Computer Society.
Silva, D. and Gluz, J. (2011). AgentSpeak(PL): A New
Programming Language for BDI Agents with Inte-
grated Bayesian Network Model. In 2011 Interna-
tional Conference on Information Science and Appli-
cations. IEEE.
Steunebrink, B., Dastani, M., and Meyer, J.-J. (2012). A
formal model of emotion triggers: an approach for bdi
agents. Synthese, 185(1):83–129.
Steunebrink, B. R., Meyer, J.-J. C., and Dastani, M. (2008).
A Formal Model of Emotions: Integrating Qualitative
and Quantitative Aspects. In Bordini, R., Dastani, M.,
Dix, J., and Fallah-Seghrouchni, A. E., editors, ECAI
2008. Schloss Dagstuhl - Leibniz-Zentrum fuer Infor-
matik, Germany.
Van Dyke Parunak, H., Bisson, R., Brueckner, S.,
Matthews, R., and Sauter, J. (2006). A model of emo-
tions for situated agents. Proceedings of the fifth inter-
national joint conference on Autonomous agents and
multiagent systems AAMAS 06, 2006:993.
Wooldridge, M. (1999). Intelligent Agents. In Weiss, G.,
editor, Multiagent systems, pages 27–77. MIT Press,
Cambridge, MA, USA.
Wooldridge, M. (2009). An Introduction to MultiAgent Sys-
tems. John Wiley & Sons.
AProbabilisticImplementationofEmotionalBDIAgents
129
