
Cooperatively Transporting Unknown Objects using Mobile Agents
Ryo Takahashi
1
, Munehiro Takimoto
1
and Yasushi Kambayashi
2
1
Department of Information Sciences, Tokyo University of Science, 2641 Yamazaki, Noda 278-8510, Japan
2
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai, Miyashiro-machi, Minamisaitama-gun 345-8501, Japan
Keywords:
Mobile Agent, Multiple Robots, Ant Colony Optimization, Swarm Intelligence.
Abstract:
This paper presents an algorithm for cooperatively transporting objects by multiple robots without any initial
knowledge. The robots are connected by communication networks, and the controlling algorithm is based on
the pheromone communication of social insects such as ants. Unlike traditional pheromone based cooperative
transportation, we have implemented the pheromone as mobile software agents that control the mobile robots
corresponding to the ants. The pheromone agent has the vector value pointing to its birth location inside,
which is used to guide a robot to the birth location. Since the pheromone agent can diffuse with migrations
between robots as well as a physical pheromone, it can attract other robots scattering in a work field to the birth
location. Once the robot finds an object, it briefly pushes the object, measuring the degree of the inclination
of the object. The robot generates a pheromone agent with the vector value to pusing point suitable for
suppressing the inclination of the object. The process of the pushes and generations of pheromone agents
enables the efficient transportation of the object. We have implemented a simulator based on our algorithm,
and conducted experiments to demonstrate the feasibility of our approach.
1 INTRODUCTION
In the last decade, robot systems have made rapid
progress not only in their behaviors but also in the
way they are controlled. In particular, a control sys-
tem based on multiple software agents can control
robots efficiently (Takimoto et al., 2007). Multi-agent
systems introduced modularity, reconfigurability and
extensibility to control systems, which had been tra-
ditionally monolithic. It has made easier the develop-
ment of control systems on distributed environments
such as multi-robot systems.
On the other hand, excessive interactions among
agents in the multi-agent system may cause problems
in the multiple robot environments. In order to miti-
gate the problems of excessive communication, mo-
bile agent methodologies have been developed for
distributed environments. In a mobile agent system,
each agent can actively migrate from one site to an-
other site. Since a mobile agent can bring the nec-
essary functionalities with it and perform its tasks au-
tonomously, it can reduce the necessity for interaction
with other sites. Mobile agent systems are especially
useful in an intermittently connected ad hoc network
environment. In the minimal case, a mobile agent re-
quires that the connection is established only when it
performs migration (Binder et al., 2001).
The model of our system is a set of cooperative
multiple mobile agents executing tasks by controlling
a pool of multiple robots as shown in Figure 1 (Kam-
bayashi and Takimoto, 2005). The property of inter-
robot movements of the mobile agents contributes to
the flexible and efficient use of the robot resources.
A mobile agent can migrate to the robot that is most
conveniently located to a given task, e.g. closest robot
to a physical object such as a soccer ball. Since the
agent migration is much easier than the robot motion,
the agent migration contributes to saving power con-
sumption (Takimoto et al., 2007). Here, notice that
any agents on a robot can be killed as soon as they
finish their tasks. If the agent has a policy of choos-
ing idle robots rather than busy ones in addition to the
power-saving effect, it would result in more efficient
use of robot resources.
We have proposed our model in the previous pa-
per (Takimoto et al., 2007) and have also shown the
effectiveness of saving power consumption and the ef-
ficiency of our system for searching targets (Nagata
et al., 2009; Abe et al., 2011) and transporting them
to a designated collection area (Shibuya et al., 2013).
In this paper, we focus our attention on transporta-
tion of a large object that a single robot alone cannot
60
Takahashi R., Takimoto M. and Kambayashi Y..
Cooperatively Transporting Unknown Objects using Mobile Agents.
DOI: 10.5220/0004816400600068
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 60-68
ISBN: 978-989-758-016-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: A team of mobile robots are working under control of mobile agents.
move. In order to deal with such a large object, sev-
eral robots have to cooperate to achieve the objective
tasks, which seems to require too artificial behaviors
for each robot. For the cooperatively solving of such
problem, swarm-based approaches, which are based
on the social insect metaphor, have been proposed.
The swarm-based system, which consists of several
robots with simple behaviors, can achieve complex
tasks, just like ants that behave based on simple rules
cooperatively transport a large prey. The swarm of
simple robots makes a system more flexible and fault-
tolerant, and contributes to suppressing costs of build-
ing a large complex system.
We have implemented the ants as actual mo-
bile software agents that control the mobile robots.
The ant agent migrates among robots to look for an
available one. Once the ant agent finds the avail-
able robot, the ant agent physically drives the robot.
We also implemented pheromone as mobile software
agents, which attract many robots to the large object
to convey through diffusing with the migrations. The
pheromone agent has a vector value pointing to the
birth point. The vector value is modified in order to al-
ways point to the birth point, each that the pheromone
agent migrates to another robot. Once the pheromone
agent migrates to the robot where an ant agent resides,
it guides the ant agent to lead the robot to its birth
point. Thus, the pheromone agents enable scattering
free robots to efficiently attend to the transportation of
the object. In our new approach, we take advantage
of the pheromone agents not only to collect robots,
but also to suppress the rotation of an object during
the transportation. We assume that each robot has a
simple sensor for checking the degree of the inclina-
tion of the object that it is pushing. When each robot
slightly pushes the object, it generates pheromones at
the suitable location to suppress the increase of the in-
clination of the object. As a result, the object can be
linearly transported to a target area, even if the object
has the form such as a stick. Notice that such an ob-
ject could not be transported without suppressing the
rolling.
The structure of the balance of this paper is as fol-
lows. In the second section, we describe the back-
ground. The third section describes our transport
model based on pheromone agents. In the fourth sec-
tion, we the numerical experiments using a simula-
tor based on our algorithm. Finally, we conclude our
discussions in the fifth section and present future re-
search directions.
2 BACKGROUND
Making multiple robots cooperatively carry and push
common objects has been intensively studied and
yet to established the standard way. Many research
projects have dealt this topic but few of them have
demonstrated on physical multi-robot systems. One
of the most demonstrated tasks involving coopera-
tive transport is the pushing objects by multiple robot
teams (Rus et al., 1995; Stilwell and Bay, 1993).
This task is inherently easy to accomplish when com-
paring to carrying tasks, because a carrying task in-
volves multiple robots’ gripping a common object and
navigating to a destination in a coordinated fashion
(Khatib et al., 1996; Wang et al., 2000).
One of the most famous transportation problems is
the box-pushing problem (Mataric et al., 1995). The
CooperativelyTransportingUnknownObjectsusingMobileAgents
61

problem is defined in (Gerkey and Mataric, 2002) and
consists of cooperatively moving a box, which is rel-
atively large when compared to the size of the multi-
robots, from an initial position to a destination using
robots that can only perform pushing movements.
On the other hand, algorithms that are inspired
by behaviors of social insects such as ants to com-
municate to each other by an indirect communication
called stigmergy are becoming popular. (Stilwell and
Bay, 1993; Dorigo and Gambardella, 1996; Dorigo
et al., 2006). Upon observing real ants’ behaviors,
Dorigo et al. found that ants exchanged information
by laying down a trail of a chemical substance (called
pheromone) that is followed by other ants. They
adopted this ant strategy, known as ant colony opti-
mization (ACO), to solve various optimization prob-
lems such as the traveling salesman problem (TSP)
(Dorigo and Gambardella, 1996). Deneubourg has
originally formulated the biology inspired behavioral
algorithm that simulates the ant corps gathering and
brood sorting behaviors (Deneubourg et al., 1991).
Wang and Zhang proposed an ant inspired approach
along this line of research that sorts objects with mul-
tiple robots (Wand and Zhang, 2004). Lumer has
improved Deneubourg’s model and proposed a new
simulation model that is called Ant Colony Cluster-
ing (Lumer and Faiesta, 1994). His method could
cluster similar objects into a few groups. Mizutani
et al. has proposed to implement pheromones as mo-
bile agents in ACO (Mizutani et al., 2010). In their
system, ants are also mobile agents, that repeatedly
migrate to robots to searching free robots correspond-
ing to objects. Once the ant agent find a free robot, it
drives the robot to a cluster of robots. The pheromone
agent is generated by the ant agent when its driving
robot reaches a cluster, and repeatedly migrates to
robots to guide ant agents to drive robots to the cluster.
The mobile agent based algorithm has been improved
to serialize collected robots (Shintani et al., 2011b;
Shintani et al., 2011a)
The applications of ants’ behaviors to coopera-
tive transportation has been proposed by Kube and
Bonabeau (Kube and Bonabeau, 2000). It transports
an object through the interplay of forces. The robots
can recognize an object through the light emitted
from the object, which works as the pheromone, but
its effectiveness is restrictive. Fujisawa et al. have
proposed the efficient cooperative transportation us-
ing ethanol as physical pheromone (Fujisawa et al.,
2010).
3 TRANSPORT MODEL
We assume that each robot just affects the transported
object through pushing it, and has to simultaneously
push it together while other robots to move it. Also,
since we assume that our multiple robots system is
used for several tasks (Nagata et al., 2009), the robots
available for the transportation are just ones not en-
gaging other task.
In order to achieve the transportation over the
robots shared with several tasks, we introduce two
kinds of agents, which are called Ant Agents (AA)
and Pheromone Agents (PA). The AA has a role for
searching a robot with no other task, and driving a
robot to the object to transport. The PA has a role
for efficiently attracting the free robots to the object
by guiding AAs on robots instead of directly driving
them. In this section, we describe the robot’s func-
tionalities required in our system, and the details of
two agents.
3.1 Robots
We assume mobile robots such as PIONEER 3-DX,
which have two servo-motors with tires, one cam-
era and sixteen sonic sensors (Nagata et al., 2009).
The power is supplied by rechargeable battery. The
PIONEER 3-DX has a servo-motor and sensor con-
troller board that sends/receives data to/from a host
computer on it through a USB cable. The camera is
directly operated by the host. Each robot holds a lap-
top computer as a host, which is also used as a server
for the migration of our control agents through the
wireless LAN.
Also, in our transportation system, we assume that
each robot has additional features as follows:
• it can push an object,
• it has the sensor for checking the degree of the
inclination of the pushing object,
• it can always know the direction to which the ob-
ject should be transported, and
• it knows the IP addresses of other robots by iden-
tifying them through the camera.
All functionalities for controlling the robot are in-
troduced into each robot through migrations of mobile
agents. Once an agent migrates to a host, the agent
can communicate with other agents on the same host,
so that the user can construct a larger system by mi-
grations to the host.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
62
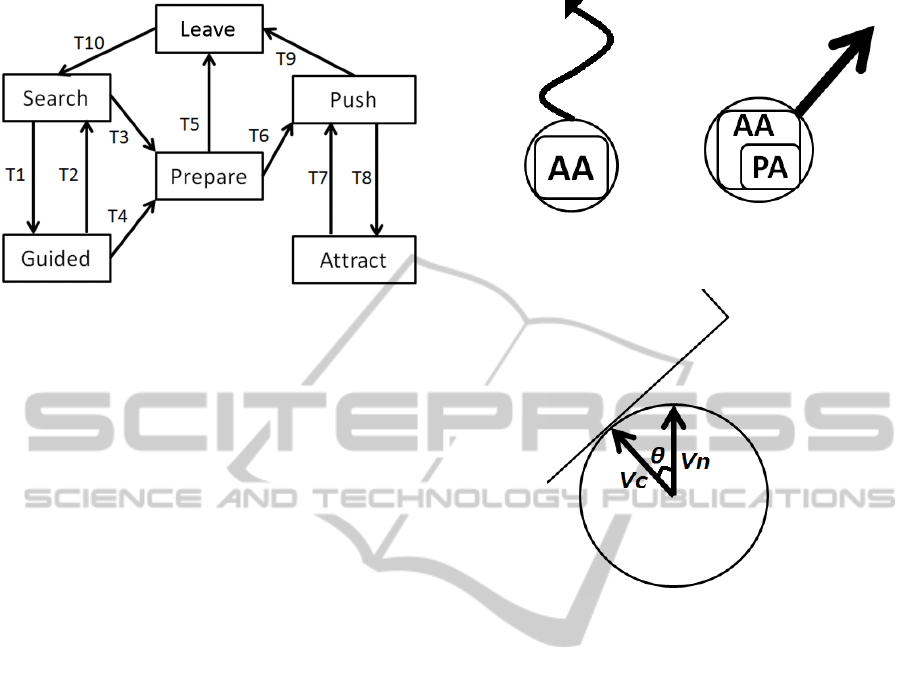
Figure 2: State transition diagram of Ant agent.
3.2 Ant Agent
AA has the list of IP addresses of all the robots in
order to traverse them one by one and to find out a
free robot. If it has exhausted all robots, it goes back
to the home host for administration of the robots, and
updates its IP address list in the following cases: 1)
some new robots have been added, and 2) some robots
have been broken, where notice that the addition or
the removal of a robot is recorded on the home host.
However, these are so rare that the home host is made
to go through in most cases.
Once an AA reaches a free robot, the AA controls
the robot along the state transition as shown in Figure
2.
First, the AA drives the robot to the object to trans-
port through two kinds of manners. Initially, the AA
makes the robot randomly walk to search the object as
shown by state Search. Once PA migrates to the same
robot, the AA drives the robot to the object along the
guidance of the PA as shown by state Guided. Af-
ter that, once the AA finds the object, it prepares for
transporting the object as shown by state Prepare.
Actual transportation is performed by repetition of
briefly pushing the object as shown by state Push
and attracting other robots to the suitable location for
balancing the object as shown by state Attract. The
transportation task of each robot is limited in the spe-
cific time, and therefore, after the time-out, the robot
is released from the task as shown by state Leave. The
details of each state is as follows:
State Search. In this state, AA drives the robot at
random as shown in Figure 3. If the robot contacts
with other robots, it temporarily stop there, and then
take an action for avoidance. Once the robot bumps
onto the object to transport, the state of the AA is
changed to the state Prepare as shown by T3 in Figure
2. On the other hand, if a PA migrates to the robot, the
Figure 3: State Search of
AA.
Figure 4: State Guided of
AA.
Figure 5: State Prepare of AA.
state is changed to the state Guided as shown by T1.
State Guided. In this state, AA drives the robot
along the guidance of the PA that has migrated to the
same robot as shown in Figure 4. The PA has the vec-
tor value pointing to the birth point of the PA, which
is adjusted to always point to the birth point even if
the robot moves or rotates. Since the PA can observe
the rotations of wheels, the vector value is modified to
neutralize the change caused by the rotation or the ap-
proach to the birth point of the robot. AA is guided for
driving the robot in the direction of the vector value.
Once the robot reaches the destination of the vector,
the AA checks whether there are some objects around
the robot or not. If some objects are found, the AA
changes its state to the state Prepare for transporting
the closest object as shown by T4; otherwise, the AA
abandons the PA guiding it, and then changes its state
to the state Search as shown by T2. At this time, the
PA is killed.
State Prepare. Once an AA finds an object, the AA
makes the robot approach to the object till contacting
with it. After that, the AA measures the normal vec-
tor V
c
against the surface of the object to know the
CooperativelyTransportingUnknownObjectsusingMobileAgents
63

Figure 6: State Attract of AA.
degree of the inclination, as shown in Figure 5. Fur-
thermore, since the AA always holds vector V
n
to its
nest to which the object is transported, it can calcu-
late θ that is the angle between V
c
and V
n
. The agents
including AA have the vector values in polar coordi-
nate form. Therefore, using the angle θ
c
of V
c
and θ
n
of V
n
, θ is straightforwardly calculated as follows:
θ = θ
c
− θ
n
(1)
If the θ is more than −
π
2
and less than
π
2
, the AA
judges that robot has a suitable direction for efficient
transportation, and changes its state to Push in order
to start the transportation of the object as shown by
T 6. Otherwise, the AA changes its state to Leave in
order to abandon the transportation, as shown by T 5.
State Push. In this state, the AA just briefly pushes
the object, and then changes its state to Attract in
order to check the change of θ as shown by T 8,
and to attract another robot to the suitable location
for balancing the object. Also, the AA releases the
robot from the transportation task after specific time.
The time-out functionality enables the finite robot re-
sources to be reused for pushing another location, an-
other object or another task, and it is achieved by
changing its state to Leave, as shown by T 9.
State Attract. Figure 6 shows the relation of a robot
and an object after the robot pushed the object in the
short period in the state Push, where V
c
may have
change. Therefore AA calculates θ
δ
to check the an-
gle θ
0
c
of new V
c
as follows:
θ
δ
= θ
0
c
− θ
c
If θ
δ
is negative, it means that the object have rotated
to the right. In this case, pushing the object at the
neighbor location of the robot in the right hand side
may suppress the rotation. Conversely, in the case
where θ
δ
is positive, pushing the object in the left
hand side of the robot may suppress the rotation to
the left. We call the location to push in order to bal-
ance the object additional push point. Once the AA
knows the additional push point, it generates PA with
the vector value pointing to the push point in order
to attract another robot. After that, the PA repeatedly
migrates some robots to find a free robot to attract.
Notice that the AA generates no PA when θ
δ
is cor-
rectly 0.
The AA generates some PAs in the predefined
time, and then changes its state back to the Push, as
shown by T 7. The several transitions between the
Push and the Attract achieves the transportation of the
object in balance.
State Leave. In this state, the AA makes the robot
turn to the back, and then, move it in the specific
distance in order to release it from the transportation
task.
3.3 Pheromone Agent (PA)
The PA has behaviors imitating the physical
pheromone of ants, of which the main role is to attract
the ants to preys or their nest. In a PA, the attraction is
implemented as a guidance functionality based on the
vector value to the birth point. As well as diffusion of
physical pheromones, the PA searches the free robot
to guide in two steps: generation and propagation of
PA. First, in the generation step, the vector value to
the birth point is set to the PA, and then, in the prop-
agation step, it starts migrating to other robots. Fi-
nally, it is killed by the abandonment of AA. Also,
when PA migrates to the robot on which another PA
resides, they are composed in the composition step. In
the remainder of the section, we describe the details
of these steps.
Generation. The PA is generated by AA, of which
the vector value is initialized to point to the neighbor
location of the robot on which the AA resides. For
example, when AA founds that the object rotates to
the right in the state Attract, it generates a PA with
the vector value as shown by V
r
in Figure 7, where V
c
is the normal vector against the object. Conversely,
if the object rotates to the left, the vector is initial-
ized as shown by V
l
. The initial vector has the length
corresponding with the size of a robot and 90 degrees
against V
c
.
Propagation. The purpose of the PA is to find a free
robot, and then to lead it to the destination of the vec-
tor value. Therefore, as soon as it is generated or
arrives at another robot, it checks around the current
robot, so that if some robots are found, it generates its
clone and makes the clone migrate to the closest one
of them. The migration to the closest robot enables
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
64
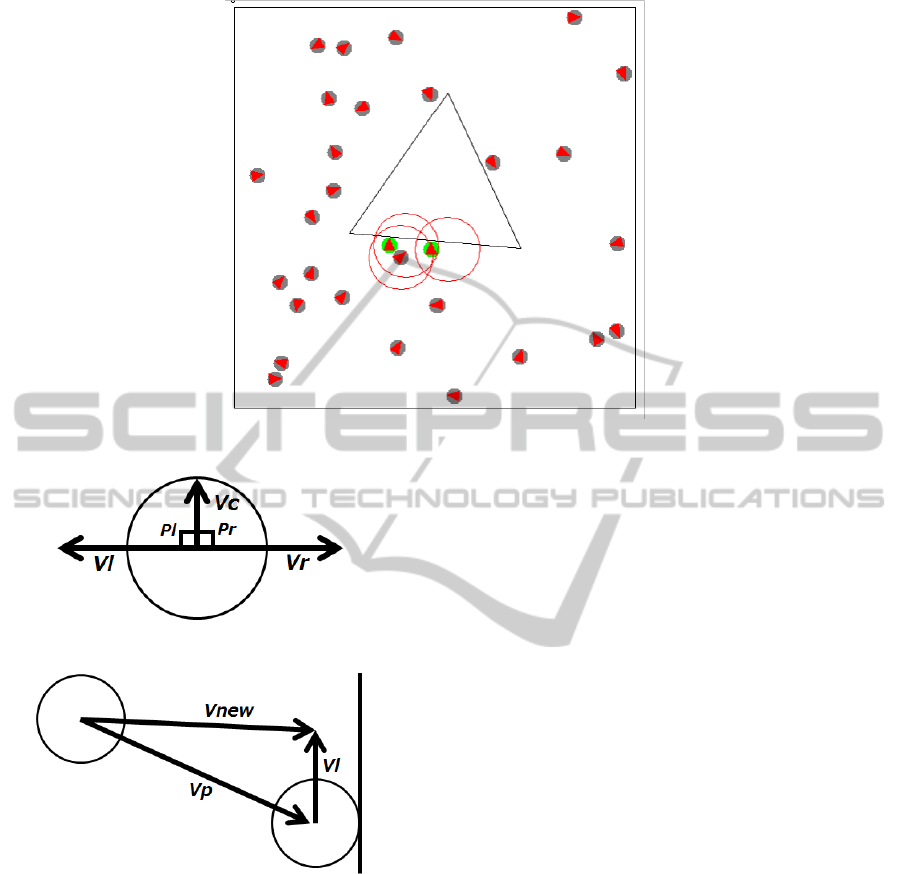
Figure 9: The snapshot image of the simulator.
Figure 7: Generation of PA.
Figure 8: Propagation of PA.
the moving distance of the robot guided by the PA to
be shorter. Notice here that in a migration process,
the destination of the vector value of new PA after the
migration has to be same as one of the old PA before
the migration, which is achieved by synthesizing the
old vector value V
old
and the vector value V
p
from the
destination to source of the migration as follows:
V
new
= V
old
+ V p
Figure 8 shows the first migration of PA after its gen-
eration. In this case, V
new
is set to V
p
+ V
l
.
As mentioned above, a PA generates its clone,
which migrates to another robot. The number of the
generation of a clone is limited to five. A clone is
generated one at a time. Also, each PA is finally aban-
doned by the AA in its state Leave, and therefore, the
PA does not continue giving the old information to the
system.
Composition. Once the PA migrates to the robot on
which another PA resides, they have to be composed.
In the case of physical pheromone, The effectiveness
of the attraction is strengthened by the composition,
whereas in PAs, either of them is alternatively se-
lected. All the vector values of them are checked, so
that the PA with shortest vector is selected.
This composition strategy enables decreasing the
total distance that all robots move, so that it con-
tributes to suppressing energy consumption of the en-
tire robot system. In addition, the strategy also con-
tributes to keeping the degree of the current disper-
sion, because it is profitable for robots to uniformly
scatter considering the case where several objects are
simultaneously transported.
4 EXPERIMENTAL RESULTS
In order to demonstrate the effectiveness of our trans-
portation method,we have implemented a simulator.
Figure 9 shows the output image of the simulator,
through which we can observe the behaviors of agents
and robots. Numerical statistic data are recorded apart
from it.
Each small circle shows a robot, the moving di-
rection of which is shown by a triangle inside it. Each
robot is assumed to move from a grid to another grid
CooperativelyTransportingUnknownObjectsusingMobileAgents
65
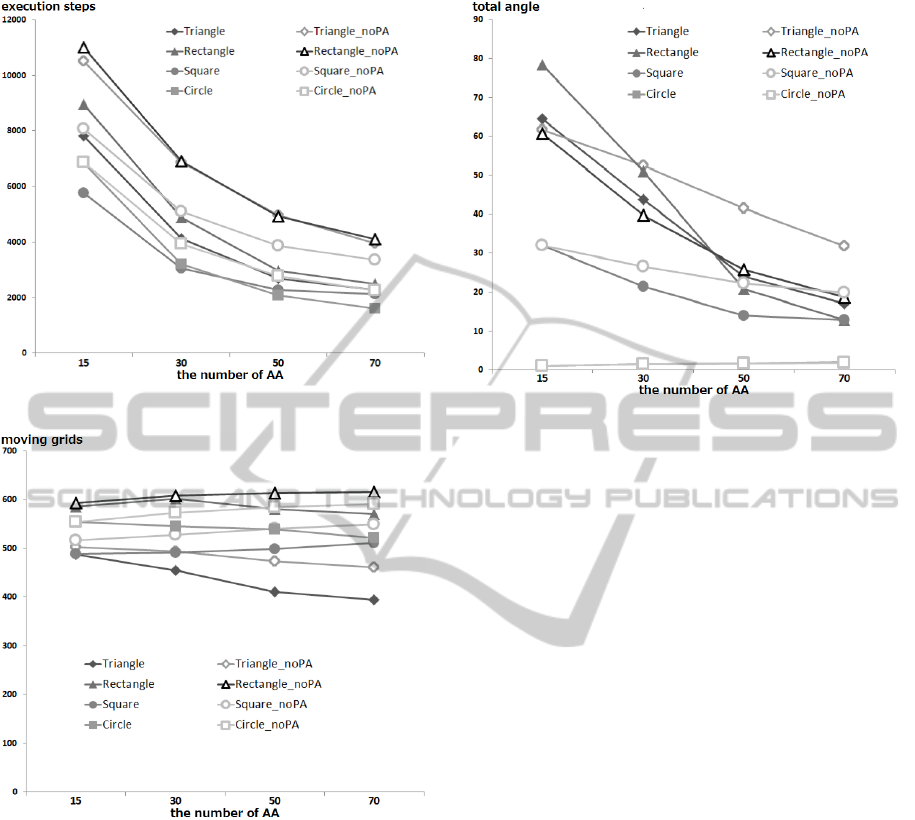
Figure 10: Transportation time.
Figure 11: Transportation distance.
in 500 × 500 grids square field. Also, the field is sur-
rounded by a wall, and therefore, robots cannot go
out the field. A big red circle with a robot at its center
shows the view range of the camera equipped on the
robot, and it is also the range where AA or PA can
migrate. In the figure, the object to transport is shown
by an equilateral triangle with sides 240 grids long.
In order to confirm the accuracy and efficiency
of our method, we have conducted eight experiments
through applying two kinds of strategies, which are
ones with PA and with no PA, to four kinds of objects
with the shapes of triangle, square, rectangle, and cir-
cle. For each experiment, we have measured the total
time and the total distance for transporting an object ,
and the total angle where the object rotates.
Figure 10 through 12 show the results of the trans-
Figure 12: Rotation angle.
portation time, the transportation distance and the to-
tal angle of the rotation of the object, respectively. In
all figures, the horizontal axes indicate the number of
AA. The vertical axis of Figure 10 indicates the num-
ber of the execution steps of the simulator as the trans-
portation time. One of Figure 11 shows the number
of moving grids as the transportation distance. One
of Figure 12 is the total angle in the transportation.
In both figures, the thin line shows the results without
PA, and the dark lines shows the result with PA.
Figure 10 shows the transportation time decreases
as AAs increases. That just means that the more
robots attend the transportation task, the more ef-
ficiently the task is performed, though the slop of
the decrease becomes close to a flat around 70 AAs.
Comparing the results with no PA and one with PA,
the transportation with PA is found to be much more
efficient. Besides, as observed from the fact that the
efficiency of 30 AAs with PA is same as one of 70
AAs with no PA, the result shows that our method has
effectiveness for suppressing the required number of
robots.
The result of the transportation distance shows
that the distance of the strategy with PA is less than
with no PA for all object shapes, and furthermore, the
distance of the no PA strategy increases as AAs in-
crease except for just the square, while the PA strat-
egy decreases for all the shapes, as shown in Figure
11.
That means PA contributes to suppressing energy
consumption in the transportation task.
The result of Figure 12 shows that the rotation
angle decreases as AA increases for both strategies.
That is because the object with the symmetry shape
naturally balances when a lot of robots uniformly con-
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
66

tacts with one side. Even if such the fact is consid-
ered, the effectiveness suppressing the rotation in pro-
portion to the number of AAs is remarkable. How-
ever, the degradation around 15 AAs is one of issues
to solve. The degradation is marked for the rect-
angle, which is likely to increase for objects with a
shape such as a stick. It is derived from the gener-
ation manner of PA. Since AA generates PA with the
vector value to the neighbor location of it, the impact
of each attraction is not so strong in the case of fewer
AAs. In order to solve the issue, it would be effec-
tive to determine the destination of PA’s vector value
in proportion to the degree of the inclination occurred
in pushing the object.
5 CONCLUSIONS
We have proposed an effective transportation method
for multiple robots using mobile agents that imitate
social insects. The transportation method enables
robots scattering in a work filed to cooperate for push-
ing an object in balance, which suppresses the rota-
tion of the object, so that it contributes to efficient
transportation and suppressing energy consumption.
In order to show the effectiveness of our transporta-
tion method, we have implemented a simulator, on
which we have conducted some experiments. As a
result, in most cases, our method shows remarkable
effectiveness for the transportation task.
On the other hand, in some case where the num-
ber of Ant agents is small, the effectiveness of our
method is restrictive. In order to solve this problem,
the destination for Pheromone agents to guide would
need to be determined depending on the degree of the
rotation.
REFERENCES
Abe, T., Takimoto, M., and Kambayashi, Y. (2011). Search-
ing targets using mobile agents in a large scale multi-
robot environment. In KES-AMSTA, volume 6682 of
LNAI, pages 211–220.
Binder, W., Hulaas, J. G., and Villazon, A. (2001). Portable
resource control in the j-seal2 mobile agent system.
In Proceedings of the fifth international conference on
Autonomous agents, AGENTS ’01, pages 222–223.
ACM.
Deneubourg, J., Goss, S., Franks, N. R., Sendova-Franks,
A. B., Detrain, C., and Chreien, L. (1991). The dy-
namics of collective sorting: Robot-like ant and ant-
like robot. In Proceedings of the First Conference
on Simulation of Adaptive Behavior: From Animals
to Animats, pages 356–363. MIT Press.
Dorigo, M., Birattari, M., and T. St
¨
utzle (2006). Ant colony
optimization–artificial ants as a computational intel-
ligence technique. IEEE Computational Intelligence
Magazine, 1(4):28–39.
Dorigo, M. and Gambardella, L. M. (1996). Ant colony sys-
tem: a cooperative learning approach to the traveling
salesman. IEEE Transaction on Evolutionary Compu-
tation, 1(1):53–66.
Fujisawa, R., Imamura, H., and Matsuno, F. (2010).
Cooperative transportation by swarm robots us-
ing pheromone communication. In Distributed
Autonomous Robotic Systems - The 10th Inter-
national Symposium, DARS 2010, volume 83 of
Springer Tracts in Advanced Robotics, pages 559–
570. Springer.
Gerkey, B. P. and Mataric, M. J. (2002). Pusher-watcher:
An approach to fault-tolerant tightly-coupled robot
coordination. In Proceedings of the IEEE Interna-
tional Conference on Robotics and Automation 1,
pages 464–469.
Kambayashi, Y. and Takimoto, M. (2005). Higher-order
mobile agents for controlling intelligent robots. Inter-
national Journal of Intelligent Information Technolo-
gies (IJIIT), 1(2):28–42.
Khatib, O., Yokoi, K., Chang, K., Ruspini, D., Holmberg,
R., and Casal, A. (1996). Vehicle/arm coordination
and mobile manipulator decentralized cooperation. In
Proceedings of the IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems, pages 546–
553.
Kube, C. R. and Bonabeau, E. (2000). Cooperative trans-
port by ants and robots. Robotics and Autonomous
Systems, 30(1-2):85–101.
Lumer, E. D. and Faiesta, B. (1994). Diversity and adap-
tation in populations of clustering ants, from animals
to animats 3. In Proceedings of the 3rd International
Conference on the Simulation of Adaptive Behavior,
pages 501–508. MIT Press.
Mataric, M. J., Nilsson, M., and Simsarian, K. T. (1995).
Cooperative multi-robot box-pushing. In Proceedings
of the IEEE/RSJ International Conference on Intelli-
gent Robots and Systems 3, pages 556–561.
Mizutani, M., Takimoto, M., and Kambayashi, Y. (2010).
Ant colony clustering using mobile agents as ants and
pheromone. In Proceedings of the Second Interna-
tional Conference on Applications of Intelligent Sys-
tems, pages 435–444. Lecture Notes in Computer Sci-
ence 5990, Springer-Verlag.
Nagata, T., Takimoto, M., and Kambayashi, Y. (2009). Sup-
pressing the total costs of executing tasks using mobile
agents. In Proceedings of Hawaii International Con-
ference on System Sciences 42 CD-ROM.
Rus, D., Donald, B., and Jennings, J. (1995). Moving furni-
ture with teams of autonomous robots. Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 235–242.
Shibuya, R., Takimoto, M., and Kambayashi, Y. (2013).
Suppressing energy consumption of transportation
robots using mobile agents. In Proceedings of the
5th International Conference on Agents and Arti-
ficial Intelligence (ICAART 2013), pages 219–224.
SciTePress.
CooperativelyTransportingUnknownObjectsusingMobileAgents
67

Shintani, M., Lee, S., Takimoto, M., and Kambayashi, Y.
(2011a). A serialization algorithm for mobile robots
using mobile agents with distributed ant colony clus-
tering. In Knowledge-Based and Intelligent Infor-
mation and Engineering Systems - 15th International
Conference, KES 2011, Proceedings, Part I, volume
6881 of Lecture Notes in Computer Science, pages
260–270. Springer.
Shintani, M., Lee, S., Takimoto, M., and Kambayashi, Y.
(2011b). Synthesizing pheromone agents for serializa-
tion in the distributed ant colony clustering. In ECTA
and FCTA 2011 - Proceedings of the International
Conference on Evolutionary Computation Theory and
Applications and the Proceedings of the International
Conference on Fuzzy Computation Theory and Appli-
cations [parts of the International Joint Conference on
Computational Intelligence IJCCI 2011], pages 220–
226. SciTePress.
Stilwell, D. J. and Bay, J. S. (1993). Toward the develop-
ment of a material transport system using swarms of
ant-like robots. In Proceedings of the IEEE Interna-
tional Conference on Robotics and Automation, pages
766–771.
Takimoto, M., Mizuno, M., Kurio, M., and Kambayashi, Y.
(2007). Saving energy consumption of multi-robots
using higher-order mobile agents. In KES-AMSTA,
volume 4496 of LNAI, pages 549–558.
Wand, T. and Zhang, H. (2004). Collective sorting with
multi-robot. In Proceedings of the First IEEE In-
ternational Conference on Robotics and Biomimetics,
pages 716–720.
Wang, Z. D., Kimura, Y., Takahashi, T., and Nakano,
E. (2000). A control method of a multiple non-
holonomic robot system for cooperative object trans-
portation. In Proceedings of the 5th International
Symposium on Distributed Autonomous Robotic Sys-
tems on Distributed Autonomous Robotic Systems 4,
pages 447–456.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
68
