
Time-segmentation- and Position-free Recognition from Video of
Air-drawn Gestures and Characters
Yuki Nitsuma, Syunpei Torii, Yuichi Yaguchi and Ryuichi Oka
Image Processing Laboratory, University of Aizu, Ikki-machi Turuga, Fukushima, Japan
Keywords:
Gesture Recognition, Segmentation-free Recognition, Position-free Recognition, Moving Camera, Dynamic
Programming.
Abstract:
We report on the recognition from video streams of isolated alphabetic characters and connected cursive textual
characters, such as alphabetic, hiragana a kanji characters, drawn in the air. This topic involves a number of
difficult problems in computer vision, such as the segmentation and recognition of complex motion from video.
We utilize an algorithm called time-space continuous dynamic programming (TSCDP) that can realize both
time- and location-free (spotting) recognition. Spotting means that prior segmentation of input video is not
required. Each of the reference (model) characters used is represented by a single stroke composed of pixels.
We conducted two experiments involving the recognition of 26 isolated alphabetic characters and 23 Japanese
hiragana and kanji air-drawn characters. Moreover we conducted gesture recognition experiments based on
TSCDP and showed that TSCDP was free from many restrictions imposed upon conventional methods.
1 INTRODUCTION
Recognition from a video stream of air-drawn ges-
tures and characters will be an important technology
for realizing verbal and nonverbal communication in
human-computer interaction. However, it is still a
challenging research topic involving a number of dif-
ficult problems in computer vision, such as segmenta-
tion in both time and spatial position, and the recog-
nition of complex motion from a video. According to
a survey (Ong and Ranganath, 2005) on gesture and
sign language recognition, the following restrictions
are necessary for realizing a gesture or sign language
recognition system:
• long-sleeved clothing
• colored gloves
• uniform background
• complex but stationary background
• head or face stationary or with less movement
than hands
• constant movement of hands
• fixed body location and pose-specific initial hand
location
• face and/or left hand excluded from field-of-view
• vocabulary restricted or unnatural signing to avoid
overlapping hands or hands occluding face
• field-of-view restricted to the hand, which is kept
at fixed orientation and distance to camera
We utilized an algorithm called time-space continu-
ous dynamic programming (TSCDP) (Oka and Mat-
suzaki, 2012) to be free from these restrictions.
TSCDP can realize both position- and segmentation-
free (spotting) recognition of a reference point (pixel)
trajectory from a time-space pattern such as a video.
Spotting means that prior segmentation along the time
and spatial axes of the input video is not required. To
apply TSCDP, we made a reference model of each
character, represented by a single stroke composed
of pixels and their location parameters. TSCDP can
be applied to two kinds of characters in the air, both
isolated and connected characters. Spotting recog-
nition via TSCDP is better suited than conventional
methods for recognizing connected air-drawn charac-
ters. This is because time segmentation is required to
separate connected characters into individual charac-
ters, and because position variation can be large when
connected characters are drawn in the air. We used
a video of air-drawn isolated characters, unadorned
with tagging data such as start or end times or location
of the characters. To obtain video data for connected
characters, we used a famous work from Japanese lit-
erature (the “Waka of Hyakunin Isshu”), drawn in the
air. We made a set of reference point trajectories, each
of which represented a single stroke corresponding to
588
Nitsuma Y., Torii S., Yaguchi Y. and Oka R..
Time-segmentation- and Position-free Recognition from Video of Air-drawn Gestures and Characters.
DOI: 10.5220/0004816805880599
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 588-599
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

an alphabetic, hiragana or kanji character.
2 RELATED WORK
There has been much research into recognizing air-
drawn characters. The projects described below
aimed to recognize isolated air-drawn characters, but
recognition from a video stream of connected air-
drawn characters has not yet been investigated. Okada
and Muraoka et al. (Okada and Muraoka, 2003;
Kolsch and Turk, 2004; Yang et al., 2002) proposed a
method for extracting hand area with brightness val-
ues, together with the position of the center of the
hand, and evaluated that technique. Horo and Inaba
(Horo and Inaba, 2006) proposed a method for con-
structing a human model from images captured by
multiple cameras and obtaining the barycentric po-
sition for this model. By assuming that the finger-
tip voxels would be those furthest from this posi-
tion, they could extract the trajectory of the fingertips
and were then able to recognize characters via con-
tinuous dynamic programming (CDP) (Oka, 1998).
Sato et al. (Sato et al., 2010) proposed a method that
used a time-of-flight camera to obtain distances, ex-
tract hand areas, and calculate some characteristic
features. They then achieved recognition by compar-
ing reference features and input features via a hidden
Markov model. Nakai and Yonezawa et al. (Nakai and
Yonezawa, 2009; Gao et al., 2000) proposed a method
that used an acceleration sensor (e.g., Wii Remote
Controller) to obtain a trajectory which was described
in terms of eight stroke directions. They then recog-
nized characters via a character dictionary. Scaroff
et al. (Sclaroff et al., 2005; Alon, 2006; Chen et al.,
2003; Gao et al., 2000) proposed a matching method
for time-space patterns using dynamic programming
(DP). Their method used a sequence of feature vectors
to construct a model of each character. Each feature
vector was composed of four elements, namely the lo-
cation (x,y) and the motion parameters (v
x
,v
y
) (more
precisely, their mean and variance). Their method
therefore requires users to draw characters within a
restricted spatial area of a scene. Moreover, move-
ment in the background or video captured by a mov-
ing camera is not accommodated, because the motion
parameters for the feature vector of the model would
be strongly affected by any movement in the input
video.
These conventional methods (except for the
method of Ezaki et al. (Ezaki et al., 2010), which
used an acceleration sensor) use local features com-
prising depth, color, location parameters, and motion
parameters, etc., to construct each character model.
They then applied algorithms such as DP or a hidden
Markov model to match models to the input patterns.
Such methods remain problematic because such lo-
cal features are not robust when confronted with the
demandingly severe characteristics of the real world.
For recognizing air-drawn characters, conventional
methods perform poorly if there are occlusions, spa-
tial shifting of the characters drawn in the scene, mov-
ing backgrounds, or moving images captured by a
moving camera.
3 CDP
CDP (Oka, 1998) recognizes a temporal sequence
pattern from an unbounded, non-segmented, tempo-
ral sequence pattern. TSCDP is a version of CDP that
is extended by embedding the space parameter (x, y)
into CDP. To show how TSCDP differs from CDP,
we first explain CDP. The algorithm in eqn. (3) calcu-
lates the optimal value of the evaluation function in
eqn. (1). Define a reference sequence g(τ), 1 ≤ τ ≤ T
and an input sequence f (t),t ∈ (−∞,∞). Define no-
tations P = (−∞,t],Q = [1,T ], i = 1,2,...,T,t(i) ∈
P,τ(i) ∈ Q, a function r(i) mapping from τ(i) to t(i)
and a vector of functions r = (r(1),r(2),...,r(T )).
There is a constraint between r(i) and r(i + 1) as de-
termined by the local constraint of CDP, as shown in
Figure 1(a). Then the minimum value of the evalua-
tion function is given by
D(t,T ) = min
r
T
∑
i=1
{d(r(i),t(i))} (1)
where t(1) ≤ t(2) ≤ · · · ≤ t(T ) = t.
The recursive equation in eqn. (3) gives the minimum
for the evaluation function in equation (1) by accumu-
lating local distances defined by
d(t,τ) = || f (t) − g(τ)||. (2)
The recursive equation for determining D(t, T ) is then
described by
D(t,τ) = min
D(t − 2,τ − 1) + 2d(t − 1,τ) + d(t, τ);
D(t − 1,τ − 1) + 3d(t, τ);
D(t − 1,τ − 2) + 3d(t, τ − 1) + 3d(t, τ).
(3)
The boundary condition is D(t,τ) = ∞, t ≤ 0, τ 6∈
[1,T ]. When accumulating local distances optimally,
CDP performs time warping to allow for variation
from half to twice the reference pattern. The selec-
tion of the best local paths is performed by the recur-
sive equation in eqn. (3). Figure 1 shows two types of
local constraints used in CDP for time normalization.
In this paper, we use type (a). Other normalization
such as from one quarter to four times can be realized
in the similar way.
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
589

(a) Time normalization from half to twice (b) Time normalization from one third to thrice
Figure 1: Two types of local constraints used in CDP. The number attached to each edge (arrow) indicates weight of the path.
4 TSCDP
We adopted a new concept for devising an algorithm
called TSCDP (Oka and Matsuzaki, 2012), which has
two advantages. First, the algorithm can perform
position-free and robust matching between a refer-
ence pattern and an input video captured by a cam-
era in real situations, which might include position
shifting, complex or moving backgrounds, and oc-
clusions. Second, the algorithm can also perform
both recognition and temporal segmentation in a sin-
gle process. Therefore, no segmentation is required
before applying TSCDP. The original paper of (Oka
and Matsuzaki, 2012) proposed this algorithm, but the
TSCDP algorithm based on the concept was neither
well implemented nor evaluated by applying real mo-
tion data. Therefore we conducted both rigorous im-
plementation of the algorithm and experimental eval-
uation with real data. In addition to isolated air-drawn
characters, TSCDP can recognize connected cursive
characters, without start and end times having to be
specified.
4.1 Evaluation Function for TSCDP
Define a reference time-space pattern, i.e., a pixel-
based time-space series over a time interval, by
Z(ξ(τ), η(τ)),τ = 1,2,...,T, (4)
where (ξ(τ),η(τ)) is the location in a two-
dimensional plane and Z is the pixel with a gray scale
or color value at that location. Define an unbounded
input time-space pattern with pixels of gray scale or
color values as
f (x,y,t),(1 ≤ x ≤ M, 1 ≤ y ≤ N, 1 ≤ t < ∞), (5)
where M,N indicate space sizes. Let
v
ξ
(τ) = ξ(τ) − ξ(τ − 1), v
η
(τ) = η(τ) − η(τ − 1) (6)
be the respective differences in ξ, η along a refer-
ence trajectory. TSCDP does not use parameters ξ, η
explicitly in either the solution algorithm or the lo-
cal distance shown later. In the recursive expres-
sion of eqn. (10), difference parameters v
ξ
,v
η
are used
instead of ξ, η. This enables TSCDP to become
position-free when recognizing moving objects from
a video. The local distance is defined by
d(x, y, τ,t) = kZ(ξ(τ),η(τ)) − f (x,y,t)k. (7)
Next, we define the minimum value for the evaluation
function. Define the following notations:
x(i) ∈ X, y(i) ∈ Y, ξ(i) ∈ X , η(i) ∈ Y,
x = x(T ), y = y(T ),
τ(T ) = T, t(T ) = t, (8)
a mapping function u
i
:(ξ(i),η(i)) → (x(i),y(i)),
Let w = (r,u
1
,u
2
,...,u
T
) be a vector of functions,
where a vector of functions r is defined as for CDP.
The optimized function is defined by
S(x,y,T,t) = min
w
{
T
∑
i=1
d(x(i), y(i), τ(i),t(i))}. (9)
4.2 Algorithm for TSCDP
When recognizing isolated or connected air-drawn
characters, temporal shrinking and expansion can oc-
cur together with spatial shifting. The following for-
mula is the algorithm to determine S(x,y,T,t) by per-
forming time-space warping. The allowable ranges
for shrinking and expansion in time and space are
each from half to twice the reference point trajectory.
Temporal shrinking and expansion from half to twice
is realized by the CDP part embedded in TSCDP. Spa-
tial shrinking and expansion from half to double is re-
alized by the second minimum calculation of TSCDP
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
590

using a parameter set A. Here, we use a parameter set
{
1
2
,1,2}, which allows spatial shrinking and expan-
sion from half to twice the reference pattern.
A = {
1
2
,1,2},
S(x,y,1,t) = 3d(x,y,1,t);
2 ≤ τ ≤ T :
S(x,y,τ,t) = min
α∈A
min
S(x − α · v
ξ
(τ),y − α ·v
η
(τ),τ − 1,t − 2)
+2d(x, y, τ,t − 1) + d(x, y, τ,t);
S(x − α · v
ξ
(τ),y − α ·v
η
(τ),τ − 1,t − 1)
+3d(x, y, τ,t);
S(x − α · (v
ξ
(τ) + v
ξ
(τ − 1)),
y −α ·(v
η
(τ) + v
η
(τ − 1)),τ −2,t −1)
+3d(x − α· v
ξ
(τ),
y −α ·v
η
(τ),τ − 1,t) + 3d(x,y,τ,t).
(10)
The boundary condition is defined by
S(x,y,τ,t) = ∞, d(x,y,τ,t) = ∞,
if (x,y) 6∈ [M,N], t ≤ 0, τ 6∈ [1,T ].
We explain the basic mechanism of the local com-
putation of TSCDP. Eqn. (10) below works for
time-space optimization of the evaluation shown by
eqn. (9) as illustrated in Figure 2. The function of the
time normalization part of eqn. (10) is the same as that
for CDP. The function for space normalization is sim-
ply added to CDP by introducing (x, y)-space to (t,τ)
space. That is, we consider an algorithm working in
a four-dimensional space, (x,y,t, τ). There are three
candidate paths in the scheme of CDP. Space normal-
ization is realized by through each of three paths of
CDP. The simplest case is the third path shown in Fig-
ure 2. The third path of TSCDP includes the third
path of CDP in the four-dimensional space. The two
times t and t − 1 appearing in the third path of CDP
have three points of τ, namely τ,τ − 1,τ − 2. There-
fore we can consider three points in 4D space. Then
the locations of (x,y)-coordinates each from the three
points have τ parameters, respectively. We consider
that each difference between them of the τ parameter
corresponds to each difference of (x,y) of images in
the input video. The difference of (x,y) is represented
by using (v
ξ
,v
η
), as shown in Figure 2. Then we em-
bed the suitable parameters of (v
ξ
,v
η
) into S(x, y, τ,t)
and d(x,y,τ,t) of eqn. (10). In this situation, only
space parameter (x, y) is embedded. No space nor-
malization is realized. If the size of (v
ξ
,v
η
) is modi-
fied, space normalization of the reference pattern can
be realized. Now we consider three types of space
size modification at each local optimization, namely
{
1
2
,1,2}. This means that any combination of local
spatial size modifications from half to twice the ref-
erence pattern can be realized. This function is real-
ized by introducing parameters, α, A = {
1
2
,1,2}, and
min
α∈A
into the recursive TSCDP equation. The first
and second candidate paths of eqn. (10) are handled
in a similar way to the third.
Figure 2: Eqn. (10) realizes an optimal pixel matching using
three candidate paths for time normalization by accumula-
tion of local distance between pixel values of a reference
and an input video. The figure shows how the third path
works during optimal path selection in 4D space. The other
two paths work in a similar way.
Eventually, the allowable time-space search ar-
rives at the time-space point (x,y,T,t), where the op-
timal matching trajectory is determined by TSCDP,
as shown in Figure 4 for the reference pattern shown
in Figure 3. The allowable search area is dependent
on the reference model for the pixel sequence. That
is, each reference model has its own allowable search
area. This differs from conventional DP matching al-
gorithms, which have the same search areas for all
reference sequences.
Figure 3: A reference pattern (pixel sequence) made by
drawing one stroke sequence (a sequence of location pa-
rameters, ((ξ(τ),η(τ)),τ = 1,2,..., T ) on a two-dimensional
plane, where the length of stroke correspond to T ) of the
reference pattern. Each pixel value Z(ξ(τ),η(τ)) of the ref-
erence pattern is assigned a constant skin color.
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
591
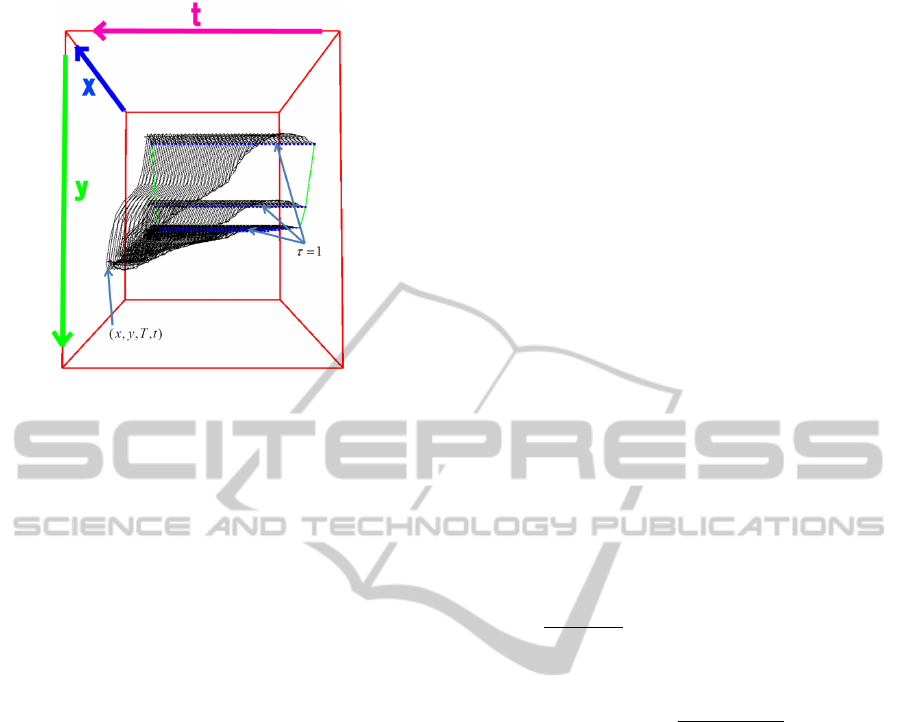
Figure 4: Search space for TSCDP in arriving at the time-
space point (x,y,T,t). Each reference model has its own
search space.
4.3 Time-segmentation-free and
Position-free Recognition
Time-space spotting recognition of a reference pat-
tern from an input video is determined frame by frame
by formula (11), using [local area], which refers to an
area composed of locations satisfying S(x,y,T,t) ≤ h
(where h is a given threshold value). The optimal ac-
cumulated value S(x, y, T,t) at each time t indicates
a two-dimensional scalar field with respect to (x,y).
Location (x,y) is called a recognition location if it
satisfies the condition S(x,y,T,t) ≤ h. A recognition
location indicates that a category represented by a ref-
erence pattern is recognized at time t ∈ [0,T ] and lo-
cation (x,y). Usually, locations neighboring a recog-
nition location are also recognition locations, because
these locations have similar matching trajectories in
the 4D ((x,y,τ,t)) space. We call such locations the
local area of recognition locations.
At each time t, we can find an arbitrary number of
local areas of recognition locations, depending upon
the number of existing time-space patterns, which are
optimally matched with a reference pattern. Then we
can determine a location, denoted by (x
∗
,y
∗
), giving
the minimum value of S(x, y,T,t) for each local area
of recognition locations. The number of these loca-
tions is the number of recognition locations at time
t. A local area of recognition locations can be cre-
ated at an arbitrary position on the (x,y)-plane de-
pending on the query video. This procedure based
on S(x,y,T,t) is the realization of the position-free
(spotting) recognition of TSCDP. On the other hand,
a local minimum location (x
∗
,y
∗
) has time parame-
ter t. If we consider a time series of a local min-
imum location, we can detect a time duration, de-
noted by [t
s
,t
e
], satisfying S(x
∗
,y
∗
,T,t) ≤ h,t ∈ [t
s
,t
e
].
The minimum value, denoted by S(x
∗
,y
∗
,T,t
reco
),
among S(x
∗
,y
∗
,T,t), t ∈ [t
s
,t
e
], corresponds to the
recognition considering time-space axes. The time
t
reco
indicates the end time of a recognized pattern in
an input query video determined without any seg-
mentation in advance. The starting time of the rec-
ognized pattern is determined by back-tracing the
matching paths of TSCDP, starting from t
reco
. This
procedure is the realization of time-segmentation-free
(spotting) recognition based on TSCDP. The follow-
ing are the algorithms for the above procedures. The
term [local area] in the following formulae is the local
area of recognition locations in the above discussion.
(x
∗
,y
∗
,T,t) = arg min
(x,y)∈[local area]
{S(x,y,T,t)} (11)
Spotting recognition for multiple categories is deter-
mined by using multiple reference patterns. Define
the i-th reference pattern of a pixel series that corre-
sponds to the i-th category by
Z
i
(ξ(τ),η(τ)),τ = 1, 2, . ..,T
i
. (12)
TSCDP then detects one or more S
i
(x
∗
,y
∗
,T
i
,t) val-
ues as frame-by-frame minimum accumulation values
for which
S
i
(x
∗
,y
∗
,T
i
,t)
3T
i
≤ h is satisfied. The following
equations determine the spotting result for multiple
categories:
i
∗
(t) = argmin
i
S
i
(x
∗
,y
∗
,T,t)
3T
i
(13)
S
i
(x
∗
,y
∗
,T
i
,t) = min
(x,y)∈[local area]
S
i
(x,y,T,t). (14)
Figure 5 shows the time-segmentation-free (spotting)
recognition of connected cursive air-drawn charac-
ters.
5 RECOGNIZING ISOLATED
AND CONNECTED
AIR-DRAWN CHARACTERS
The first step in recognizing air-drawn characters via
TSCDP is to make a model of each character cat-
egory as a reference pattern for TSCDP. Such a
TSCDP reference pattern (model) is determined by
a stream of pixels forming a trajectory on a two-
dimensional plane. This procedure corresponds to a
learning procedure for making a model used in con-
ventional on- or off-line character recognition. But
our method is different from conventional learning
methods. We do not use sample videos for making
reference patterns for TSCDP. A reference pattern of
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
592
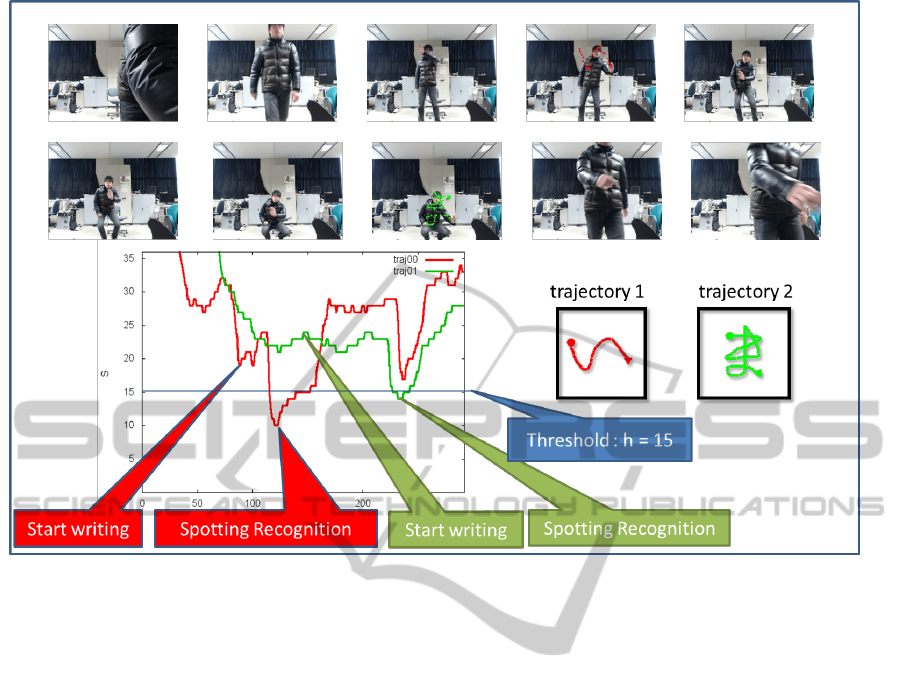
Figure 5: Time-segmentation-free recognition for connected characters. Two connected characters are separately recognized
at different time points without any advance segmentation.
TSCDP is made by air-drawing one stroke projected
on a two-dimensional plane. A stroke is a sequence
of pixel location parameters ξ(τ),η(τ), τ = 1,2,...,T .
The length of stroke corresponds to T . Each lo-
cation of the stroke is assigned a pixel value, de-
noted by Z(ξ(τ),η(τ)), expressing a constant skin
color. Finally, a reference pattern is represented by
Z(ξ(τ), η(τ)),τ = 1, 2, ...,T . The second step is treat-
ment of single-stroke representation of a model. The
stream is composed of connected straight or curved
lines. Categories for characters such as ‘C,’ ‘O,’ and
‘Q’ are easy to represent representing a one-stroke
model. However, most other characters, including
those from the alphabet or Japanese hiragana or kanji
characters, cannot be drawn as a single stroke. For
these characters, we make a one-stroke model for
each character by connecting its separate strokes with
additional strokes in the air. These additional strokes
are not part of the actual strokes belonging to the char-
acter itself. Using this kind of modeling for each char-
acter allows TSCDP to be adopted for their recogni-
tion.
We prepared single-stroke models for each cate-
gory of alphabetic and Japanese hiragana and kanji
characters. The input pattern is obtained from a video
capturing isolated characters or a sequence of con-
nected cursive characters drawn by human hand in the
air. We do not specify start and end times for each
drawing, even for isolated characters. Furthermore,
neither a color finger cap, nor gloves, nor any special
device is required. Applying TSCDP to a character
model with category number i, we obtain i
∗
(t), where
the time t is called the spotting time. If multiple i
∗
(t)
values are detected, the output for the time is deter-
mined by selecting the category with the maximum
stroke length.
6 EXPERIMENTS
6.1 Database and Performance for a
Comparison Study
We use videos obtained by capturing air-drawn ges-
tures and characters made with one stroke in a
position-free style. Some of these gesture videos in-
clude large occlusion, multiple gestures in a single
scene, or connected characters. Some were captured
by a moving camera with moving backgrounds. There
had been no experiment in the past applying conven-
tional methods to such real data. Therefore, it seems
impossible to compare our method with the conven-
tional methods described in such papers (Okada and
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
593

Muraoka, 2003; Horo and Inaba, 2006; Sato et al.,
2010; Nakai and Yonezawa, 2009). Moreover our
database is rather small. Therefore the experiments
in this paper are regarded as preliminary trials to in-
vestigate whether or not TSCDP can loosen the many
constraints mentioned in the introduction, before ap-
plying a large amount of real world data. For recog-
nizing air-drawn characters, we apply two kinds of
spotting recognitions using the same TSCDP. Final
decision algorithms are different from each other, as
mentioned in section 4.
6.2 Experimental Conditions
Figure 6(a) shows a set of reference patterns for an al-
phabet of 26 categories, each of which is a one-stroke
model. In addition, we manually constructed a set of
(a) Alphabet
(b) Hiragana & kanji
Figure 6: List of reference patterns. Each reference pattern
is made with a single stroke.
one-stroke characters, as seen in Figure 6(b). These
one-stroke characters are used in the Waka poem and
are to be regarded as the reference patterns when ap-
plying TSCDP in parallel. Figure 7 shows a sheet of
paper upon which the famous Japanese “Waka Imako-
muto” from the “Hyakunin Isshu” is written. We
showed this example to the participants, who were in-
structed to write the Waka in the air using connected
characters. The experimental conditions were as fol-
Figure 7: Waka shown to participants drawing a sequence
of connected cursive characters in the air.
lows.
• Video:
– Frames per second: 20 fps
– Resolution: 200 × 150 pixels
– RGB color was used (8 bits per color)
• Reference patterns for characters:
– A single stroke reference pattern was con-
structed manually for each character.
– A spatial distance of 3 pixels along a stroke in
the plane (ξ,η) corresponding to 50 ms in pa-
rameter τ of Z. These parameters were fixed for
all reference patterns. The total length L pixels
of each stroke determined T = (L/3)×50 ms in
Z.
• Scene:
– Each participant wrote isolated characters in
the air without start or end time being specified.
They also wrote connected characters in the air,
column by column, without a specified start or
end time.
• There were three participants.
• The list of hiragana and kanji models (26 alpha-
betic characters) for recognizing isolated charac-
ters is shown in Figure 6(a).
• The list of models (23 references) for recogniz-
ing connected characters is shown in Figure 6(b).
A writing style for connected cursive characters
(Figure 7) was shown to each person in advance.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
594

• Parameters:
– The spotting recognition threshold was h = 15
(fixed).
– Z = (R, G, B) = (190, 145, 145) (fixed).
– The Euclidian norm was used for calculating
local distance.
6.3 Constraint-free Characteristics of
TSCDP
As mentioned in the introduction, most conventional
methods for realizing recognition systems are subject
to many restrictions. A system based on TSCDP can
dispense with many of them, as our experimental re-
sults indicate. We did not use long-sleeved clothing or
colored gloves. Using a reference pattern composed
of pixels with a constant skin color, TSCDP optimally
matches only an existing pixel sequence in an input
video without identifying any areas of hand or finger.
The inferred skin tone is roughly determined, with-
out deep investigation, but TSCDP works well using
the heuristically derived skin color. TSCDP seems ro-
bust to variation of skin color, and is also robust when
faced with complex and moving backgrounds because
TSCDP matches only with a sequence of pixels (a
macroscopic and specified motion with time length
T ), so that moving backgrounds, including head or
face movement, do not interfere with the total accu-
mulation value of local distances if moving T back-
grounds do not have a similar motion to a reference
pattern with a period of around length T . Figure 8 il-
lustrates the recognition of a gesture in a complex and
moving background.
TSCDP allows non-linear variations from half to
twice the velocity of movement by the CDP part
of TSCDP. Figure 5 illustrates time-segmentation
recognition without any segmentation of start and end
time after adapting non-linear time variations. Con-
straints of fixed body location and pose-specific ini-
tial hand location are required by conventional meth-
ods because they are position-dependent when they
match a model sequence and a video. The model
of conventional methods is made by features includ-
ing location parameters, so that whole target match-
ing procedures are still location-dependent. A refer-
ence pattern of TSCDP also has location parameters.
However the dependency of location is relaxed by di-
rectly embedding the location difference u
ξ
(τ),v
η
(τ)
into time-warping candidate paths. The position-free
characteristic property is then realized in TSCDP, as
mentioned in §4.3. The allowance for spatial shrink-
ing and expansion is also realized by embedding path
selection for contracting and dilating spatial size us-
ing both u
ξ
(τ),v
η
(τ) and a set of parameters A in the
recursive equation of TSCDP. Figure 9 shows a ref-
erence pattern that is recognized at different positions
when multiple and similar time-space patterns exist in
a video.
TSCDP also is robust when presented with over-
lapping hands or occlusion, because these cases in-
crease only a relatively small part of accumulated
value S(x,y,T,t), depending on the spatial and tem-
poral size of overlapping hands or hands over face or
occlusion by objects between the camera and subject.
Figure 10 shows how a gesture is correctly recognized
even in the presence of occlusion. A reference pattern
Figure 10: The upper the figure shows the case in which the
occlusion occurs at the beginning period in drawing the ‘S’
character. The lower the figure shows the case in which the
occlusion occurs during the middle period. TSCDP recog-
nizes character gestures correctly for both cases.
can be made by any kind of single-stroke sequence
projected on a two-dimensional plane. Therefore, a
reference pattern with complex shape and long dura-
tion is acceptable. Chinese kanji characters belong
to this category. It becomes even easier to recognize
complex and long reference patterns by TSCDP be-
cause they are more distinguishable from one another.
Complex reference patterns allow a large vocabu-
lary. Figure 11 shows recognition of complex Chi-
nese characters including a character “kuru” (“come”
in English), which is the last one in Figure 6(b). A set
of gesture patterns caused by various fields-of-view
of a hand is generated by non-linear time and space
deformations of the reference pattern.
Let {F(x, y)|(x,y) ∈ R} be an image of object at
a fixed time t
0
, where R is a raster (two-dimension
pixel area) and define t ≥ t
0
as a time. Define a dis-
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
595

Figure 8: Recognition of an air-drawn gesture under situation the condition of a complex scene with moving objects in the
background. The scene includes people walking in the background, and the static background is a normal office environment.
Figure 9: A reference pattern is recognized at different positions (right and down, left and up positions), each of which
corresponds to an existing similar trajectory in a video.
Figure 11: Complex Chinese characters are recognized by TSCDP.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
596
tance p(t)[cm] between a camera and an object, and
a parameter c whose value is determined by calibra-
tion. If the camera moves p(t) forward or backward
relative to the object, then the two-dimensional im-
age of an object shrinks or expands, which simple
geometric property is described by {F(x × c
p(t
0
)
p(t)
,y ×
c
p(t
0
)
p(t)
)|(x,y) ∈ R}, where c is regarded as a parameter
to transform a value of distance ratio to pixel size.
If the conditions of range
x
2
≤ x × c
p(t
0
)
p(t)
≤ 2x and
y
2
≤ y × c
p(t
0
)
p(t)
≤ 2y are satisfied, the space normal-
ization of TSCDP works well.
On the other hand, let define x(t) a pixel size of
rightward or leftward motion of the camera at time t
from x(t
0
) = 0, where x(t) > 0 for rightward motion
and x(t) < 0 for leftward motion, assuming no verti-
cal movement. Then the two-dimensional image of
an object expands to right or left direction and is de-
scribed by {F(x +x(t), y)|(x, y) ∈ R}. If the condition
of range
x
2
≤ x(t) ≤ 2x is satisfied, then the space nor-
malization of TSCDP works well.
Let F(t) be an image of the object at t with simul-
taneous combination of two kinds of a camera motion.
Then F(t) is determined by:
F(t) = {F((x+x(t)})×c
p(t
0
)
p(t)
,y×c
p(t
0
)
p(t)
)|(x,y) ∈ R}.
If the conditions of the range,
x
2
≤ (x + x(t)}) ×
c
p
0
p(t)
≤ 2x and
y
2
≤ y × c
p(t
0
)
p(t)
≤ 2y, are satisfied, the
space normalization of TSCDP well works.
If time shrinking or expansion occurs as a side ef-
fect of camera motion, time normalization of TSCDP
works well, scaling from half to twice. This reason-
ing is equivalent to saying that if a pixel trajectory
is included in F(t), (t ∈ [t
0
,t]) and also belongs to
the time-space area of Figure 5 of a reference pat-
tern, then the pixel trajectory is well recognized by
TSCDP. Otherwise the accumulated local distance S
increases depending on the size of the part of trajec-
tory out of the time-space area of Figure 5. If the in-
creased accumulated distance S is smaller than thresh-
old h, then the trajectory is well recognized. If we set
a higher threshold value h, the recognition system be-
comes more robust to largely deformed input patterns
at the cost of increasing error rate. Robustness and
error rate are traded-off in determining the threshold
value h.
Figure 12 shows that a continuously deforming
image of a gesture is well recognized in a video which
captures the gesture under changing distance from
and orientation to the camera.
6.4 Experimental Results for Isolated
Character Recognition
For recognition of isolated characters by TSCDP,
there were two types of errors, confused recognition
and missing recognition. Missing recognition can oc-
cur because, even for isolated characters, a thresh-
old value is used to determine whether or not a spot-
ting output is obtained. If all TSCDP output values
S
i
(x
∗
,y
∗
,T
i
,t)/(3T
i
) are above the threshold value h
for i = 1,2,...,N, and t ∈ (−∞,+∞), there will be no
output recognition from the input video. The recogni-
tion rates are shown in Table 1.
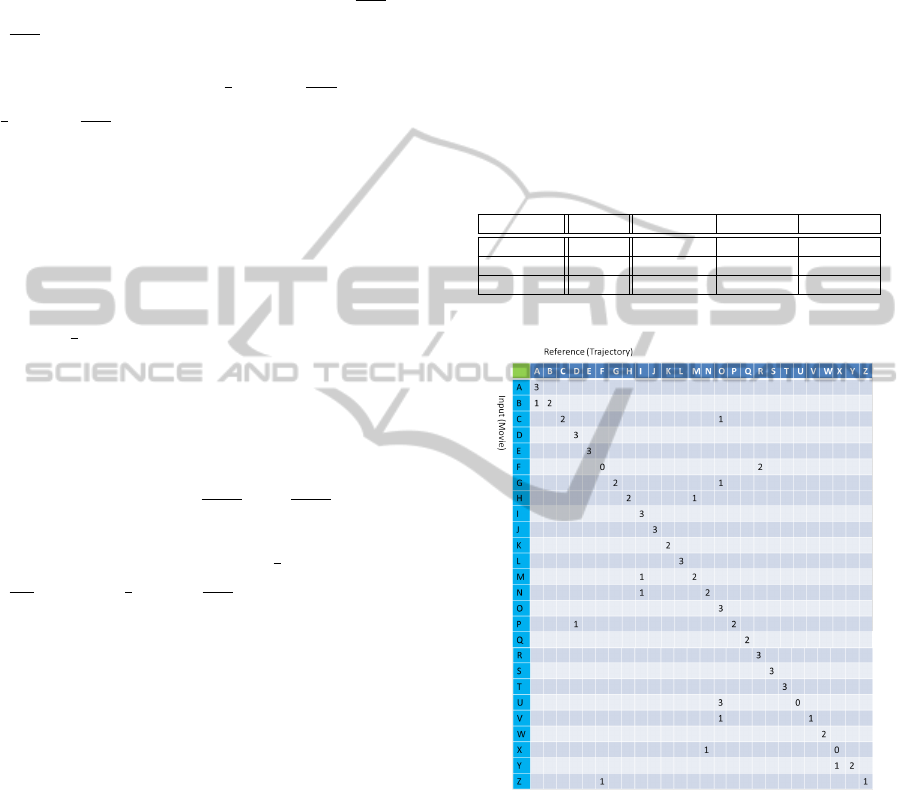
Table 1: Results of the first experiment.
Result Total Subject A Subject B Subject C
Correct 62.6% 46.2% 61.5% 80.1%
Missing 5.1% 0.0% 3.8% 11.5%
Confusion 32.3% 33.8% 34.7% 18.4%
Figure 13: Confusion matrix of recognition results for iso-
lated characters.
Figure 13 shows the confusion matrix for the
recognition of isolated characters.
6.5 Experimental Results for Connected
Character Recognition
Researching recognition of connected characters by
TSCDP, there were three types of errors. The first,
“missing (M),” means that no category was detected at
the correct time. The second, “ghost (G),” means that
an output appeared at an incorrect time. The third,
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
597

(a) starting image of the moving camera. (b) ending image of the moving camera.
Figure 12: A moving camera captures a deforming gesture caused by different distance and orientation to the camera. TSCDP
can recognize the deforming gesture.
“confusion (F),” means that a category was detected at
the correct time but the category was incorrect. Cor-
rect output, “correct (C),” means that correct output
was obtained at the correct time. We can then deter-
mine each recognition rate as follows.
• Correct rate =
C
(M + G + F +C)
× 100%
• Missing rate =
M
(M + G + F +C)
× 100%
• Ghost rate =
G
(M + G + F +C)
× 100%
• Confusion rate =
F
(M + G + F +C)
× 100%
The recognition rates are shown in Table 2, where
Ghost rate = 0%, and the confusion matrix is shown
in Figure 14.
Table 2: Results of the second experiment.
Result Total Subject A Subject B Subject C
Correct 64.4% 82.8% 62.1% 48.3%
Missing 11.1% 3.4% 17.2% 13.8%
Confusion 24.5% 13.8% 20.7% 37.9%
7 CONCLUSIONS
This study confirmed that TSCDP can work well for
recognizing both isolated and connected cursive air-
drawn characters from a video. In particular, con-
nected air-drawn characters can be recognized with-
out time-segmentation in advance. Moreover, we pre-
sented several experimental results of gesture recog-
nition that demonstrate how TSCDP is free from
many constraints, including position restrictions, that
are imposed by conventional methods for realizing a
recognition system of gesture or sign language.
Figure 14: Confusion matrix of recognition results for con-
nected alphabetic hiragana and kanji characters.
REFERENCES
Alon, J. (2006). Spatiotemporal Gesture Segmentation. Dis-
sertation for Doctor of Philosophy, Boston University.
Chen, F., Fu, C., and Huang., C. (2003). Hand gesture
recognition using a real-time tracking method and hid-
den markov models. Image and Video Computing,
21(8):745–758.
Ezaki, N., Sugimoto, M., Kiyota, K., and Yamamoto, S.
(2010). Character recognition by using acceleration
sensor: Proposing a character input method using wi-
imote [in Japanese]. Meeting on Image Recognition
and Understanding, IS2–48:1094–1098.
Gao, W., Ma, J., J.Wu, and Wang, C. (2000). Sign lan-
guage recognition based on hmm/ann/dp. Interna-
tional Journal of Pattern Recognition and Artificial
Intelligence, 14(5):587–602.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
598

Horo, T. and Inaba, M. (2006). A handwriting recog-
nition system using multiple cameras [in Japanese].
Workshop on Interactive Systems and Software
(WISS2006).
Kolsch, M. and Turk, M. (2004). Robust hand detection. In
Proc. Sixth IEEE International Conference on Auto-
matic Face and Gesture Recognition, pages 614–619.
Nakai, M. and Yonezawa, H. (2009). Aerial handwrit-
ten character recognition using an acceleration sensor
[in Japanese]. Forum on Information Technology, H–
19:133–134.
Oka, R. (1998). Spotting method for classification of real
world data. The Computer Journal, 41(8):559–565.
Oka, R. and Matsuzaki, T. (2012). Robustness for
time-spatial deformation of an occlusion realized
in time-space continuous dynamic programming [in
Japanese]. Joint Technical Meeting on Informa-
tion Processing and Innovative Industrial Systems,
27(6):873–891.
Okada, T. and Muraoka, Y. (2003). Letter input system for
handwriting gestures [in Japanese]. Transactions of
the Institute of Electronics, Information and Commu-
nication Engineers, D-II J86-D-II(7):1015–1025.
Ong, S. C. W. and Ranganath, S. (2005). Automatic sign
language analysis: A survey and the future beyond
lexical meaning. Pattern Analysis and Machine In-
telligence, 27(6):873–891.
Sato, A., Shinoda, K., and Furui, S. (2010). Sign language
recognition using time-of-flight camera [in Japanese].
Meeting on Image Recognition and Understanding,
IS3–44:1861–1868.
Sclaroff, S., Betke, M., Kollios, G., Alon, J., Athitsos, V.,
Li, R., Magee, J., and Tian, T.-P. (2005). Tracking
analysis and recognition of human gestures in video.
ICDAR: Int. Conf. on Document Analysis and Recog-
nition.
Yang, M., Ahuja, N., and Tabb, M. (2002). Extraction of
2d motion trajectories and its application to hand ges-
ture recognition. Pattern Analysis and Machine Intel-
ligence, 24(8):1061–1074.
Time-segmentation-andPosition-freeRecognitionfromVideoof
Air-drawnGesturesandCharacters
599
