
Optimal Conjugate Gradient Algorithm for Generalization of Linear
Discriminant Analysis Based on L
1
Norm
Kanishka Tyagi
1
, Nojun Kwak
2
and Michael Manry
1
1
Department of Electrical Engineering, The University of Texas at Arlington, Arlington, Texas, U.S.A.
2
Graduate School of Convergence Science and Technology, Seoul National University, Seoul, Korea
Keywords:
Linear Discriminant Analysis, L
1
Norm, Dimension Reduction, Conjugate Gradient, Learning Factor.
Abstract:
This paper analyzes a linear discriminant subspace technique from an L
1
point of view. We propose an efficient
and optimal algorithm that addresses several major issues with prior work based on, not only the L
1
based LDA
algorithm but also its L
2
counterpart. This includes algorithm implementation, effect of outliers and optimality
of parameters used. The key idea is to use conjugate gradient to optimize the L
1
cost function and to find an
learning factor during the update of the weight vector in the subspace. Experimental results on UCI datasets
reveal that the present method is a significant improvement over the previous work. Mathematical treatment
for the proposed algorithm and calculations for learning factor are the main subject of this paper.
1 INTRODUCTION
Dimensionality reduction and object classification
has received considerable attention from the pattern
recognition community in the past decades (Duda
et al., 2012), (Theodoridis and Koutroumbas, 2009).
The goal of dimensionality reduction in classification
is to remove less useful elements from the input vec-
tors. Some of the conventional methods employed
for dimensionality reduction and object classification
are principal component analysis (PCA) (Fukunaga,
1990) (Turk and Pentland, ), independent compo-
nent analysis (ICA) (Bell and sejnowski, 1995) (Cao
et al., 2003) (Kwak and Choi, 2003) (Kwon and Lee,
2004) and linear discriminant analysis (LDA) (Fisher,
1936).
The linear discriminant analysis) of Fisher (Fisher,
1936) is a classical supervised subspace analysis tech-
nique. By minimizing the within-class scatter and
maximizing the between-class scatter, LDA seeks dis-
criminative features. LDA is a classic dimensionality
reduction method that preserves as much of the class
discriminatory information as possible.
Since the conventional LDA discriminates data in
a least square sense (L
2
norm), it is prone to prob-
lems common to any methods utilizing L
2
optimiza-
tion. It is well known that conventional subspace
analysis techniques based on L
2
norm minimization
is more sensitive to the presence of outliers as its
effect is magnified due to a large norm. To allevi-
ate this problem, Koren et., al. (Koren and Carmel,
2008) proposed an optimal weighting approach that
assigns small weights to the outliers. However, an
optimal weighting parameter is difficult to determine.
(Li et al., 2010) proposes a similar rotational invari-
ant L
1
approach but in author’s opinion, the method
has complex implementation. Another problem of the
conventional LDA arises from the assumption that the
data distribution is Gaussian. It means that if there are
several separate clusters in a class (i.e., multi modal)
then the data is not uniquely modeled by a Gaussian
distribution. As a result the approaches based on L
2
norm will fail (Fukunaga, 1990). To overcome the
difficulty of multi-modal data distribution with LDA,
it can be combined with the unsupervised dimension
reduction algorithms called locality preserving pro-
jection method (LPP) to form a local Fisher discrimi-
nant analysis (LFDA), which effectively combines the
ideas of LDA and LPP (Sugiyama, 2007).
In this paper, an efficient L
1
norm based-LDA al-
gorithm (Oh and Kwak, 2013), which is motivated by
the work in (Kwak, 2008), has been improved by us-
ing an iterative algorithm based on a modified opti-
mal conjugate gradient (OCG) to solve an L
1
norm
LDA problem (called OCG-LDA hereafter). We also
introduce a learning factor scheme for updating the
weight vector or projection vectors in the OCG algo-
rithm. The OCG algorithm iteratively converges to
an optimal solution similar to iterative recursive least
squares (IRLS) algorithm.
207
Tyagi K., Kwak N. and Manry M..
Optimal Conjugate Gradient Algorithm for Generalization of Linear Discriminant Analysis Based on L1 Norm.
DOI: 10.5220/0004825402070212
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 207-212
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

The remainder of this paper is structured as fol-
lows. Section 2 reviews the conventional LDA
method (based on L
2
norm). In Section 3, we pro-
pose the L
1
LDA based on OCG algorithm includ-
ing its mathematical treatment, theoretical justifica-
tion, proof for suboptimal learning factor and algo-
rithmic description of the complete methodology. Ex-
perimental results are presented in Section 4. Sec-
tion 5 discusses the results and finally Section 6 and
7 summarizes the proposed work and presents some
future exploration respectively.
2 CONVENTIONAL L
2
LDA: A
REVIEW
Linear discriminant analysis is a subspace learning
approach that leads to supervised dimensionality re-
duction. It is based on the work of Fisher (Fisher,
1936) and can be considered as an optimal feature
generation process (Theodoridis and Koutroumbas,
2009). It tries to find a transformation that maximizes
the ratio of the between-class scatter matrix S
B
and
the within-class scatter matrix S
W
(Fukunaga, 1990)
which are defined as
S
B
=
C
∑
i=1
N
i
(m
i
− m)(m
i
− m)
T
S
W
=
C
∑
i=1
N
i
∑
j=1
(x
i
j
− m
i
)(x
i
j
− m
i
)
T
(1)
where x
j
i
is the i-th sample of class j, m
j
is the mean
of class j, C is the number of classes, N
i
is the number
of samples in class i and m represents the mean of
all samples. This is formulated to find M projection
vectors
{
w
i
}
M
i=1
that maximize the Fisher’s criterion
with respect to W = [w
1
,··· ,w
M
], as follows:
W
LDA
= argmax
W
W
T
S
B
W
|W
T
S
W
W |
. (2)
Equation (2) is the generalized Rayleigh quotient
(Duda et al., 2012), which, as known from linear al-
gebra, is maximized if W is chosen such that
S
B
w
i
= λ
i
S
W
w
i
λ
1
≥ λ
2
··· ≥ λ
m
(3)
Then the linear projection of
{
w
i
}
M
i=1
can be ob-
tained. Here λ
i
is the i-th largest eigenvalue of S
−1
w
S
B
and w
i
∈ ℜ
d×m
. Viewing LDA as dimension reduc-
tion technique, LDA is performed by mapping each
vector x in d-dimensional space to a vector y in the M
dimensional space (M < d) linearly. The linear pro-
jection is such that the lower dimensional projection is
closer for same class and farther for different classes.
However it is well known that if the L
p
(p < 2) norm
is used instead of L
2
norm, outliers are suppressed and
the method performs better (Oh and Kwak, 2013). In
our present investigation, we consider p = 1. The de-
tails are presented in next section.
3 PROPOSED PARADIGM:
OCG-LDA
It is well known in the literature that algorithms based
on the L
1
norm are less sensitive to outliers as com-
pared to their L
2
counterparts (Claerbout and Muir,
1973) (J. A. Scales and Lines, 1988).
3.1 L
1
Norm based LDA
We formulate an L
1
-norm maximization problem to
design an L
1
based LDA. Motivated from the basic
L
1
theory, we solve the following L
1
-norm maximiza-
tion problem (Oh and Kwak, 2013) with the constraint
||w||
2
=1.
F
1
(w) =
∑
C
i=1
N
i
|w
T
(m
i
− m)|
∑
C
i=1
∑
N
i
j=1
|w
T
(x
i
j
− m
i
)|
(4)
In order to maximize the objective function in (4),
we need to consider its non-convexity owing to the ab-
solute value function involved. The singularity due to
the non-convexity of F
1
(w) makes it difficult to calcu-
late its gradient vector and direction vector. In order
to circumvent this problem, we use sgn(·) function as
follows,
sgn(i) =
1 if i > 0
0 if i = 0
−1 if i < 0.
(5)
modify equation (4) as,
F
1
(w) =
∑
C
i=1
N
i
sgn(w
T
a
i
) · (w
T
a
i
)
∑
C
i=1
∑
N
i
j=1
sgn(w
T
b
i
j
) · (w
T
b
i
j
)
. (6)
Here,
a
i
= m
i
− m
b
i
j
= x
i
j
− m
i
.
(7)
3.2 Mathematical Treatment
We now take the gradient of (4) with respect to w.
g(w) = ∇
w
F
1
(w) =
(A · B) − (C · D)
B
2
(8)
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
208

where A,B,C and D are defined as,
A =
C
∑
i=1
N
i
sgn(w
T
a
i
) · a
i
B =
C
∑
i=1
N
i
∑
j=1
sgn(w
T
b
i
j
) · (w
T
b
i
j
)
C =
C
∑
i=1
N
i
sgn(w
T
a
i
) · (w
T
a
i
)
D =
C
∑
i=1
N
i
∑
j=1
sgn(w
T
b
i
j
) · b
i
j
The above gradient is well defined when w
T
b
i
j
6= 0
for all i = 1,··· ,C and j = 1,··· ,N
i
. However, the A
and D terms in (8) are not well defined at the singular
points where w
T
b
i
j
= 0 because 0
0
is hard to define.
To avoid this problem, we add a singularity check step
before computing the gradient vector in later develop-
ment.
3.3 Theoretical Treatment: Why
Conjugate Gradient ?
The specific objective of the present work is to im-
prove upon the existing approach of (Oh and Kwak,
2013). In order to do that, we first replace the steepest
descent algorithm with a much better conjugate gra-
dient approach. To have a better intuitiveness for the
learning factor, we update the weight vector as fol-
lows:
w(t + 1) ← w(t) + z
1
· v(t) (9)
where v(t) is the direction vector and z
1
is the learning
factor, as discussed in the next subsection.
The reason as to why steepest descent is slow is
due to its straight line search strategy. Since the steep-
est descent works on the gradient direction and goes
along a straight line search, it does not stop till the
descent line is parallel to the contour line of the cost
function surface. This poses a serious problem and
eventually leads to slow minimization. What if we
want to stop and change the gradient direction before
it becomes parallel? In steepest descent it is difficult
to make such a stop and therefore it will follow a zig-
zag pattern (Haykin, 2009). In general, overshoot-
ing and undershooting are inherent problems with the
steepest descent approach. One way to overcome this
is to use an learning factor so as to update the weight
vector with gradient information in a more intelligent
way. However what if instead of a line search we
do a plane search? This leads to the conjugate gra-
dient (CG) method where an arbitrary combination of
two vectors forms a hyperplane. The CG algorithm
(Chong and Stanislaw, 2013) solves the equation in
exactly n steps where n is the number of unknowns.
However for non L
2
functions,(non -quadratic func-
tions)a plane search is hard to deal with.
The conjugate gradient algorithm is related to
Krylov subspace (Olavi, 1993) iteration methods.
Our motivation for using CG comes from its easy
modification for non quadratic problems. From the
Hestense-Stiefel formula (to overcome line search
problem) and Polak Ribiere formula, we conclude
that major techniques exist to go around the two ma-
jor problems of line search and calculation of Hessian
matrix (Chong and Stanislaw, 2013).
Having a strong reason to use CG algorithm, we
now present a brief description of the learning factor,
weight updation scheme and proposed algorithm in
the subsequent section.
3.4 Deriving the Learning Factor
Let F
new
1
be the estimated new value of F
1
. Applying
Taylor series on F
1
, we get
F
new
1
= F
old
1
+ g
n
· ∆w (10)
where gradient g = dF
1
/dw. Now we have ∆w = z
1
·v.
Substituting the value of ∆w in (10) we get,
F
new
1
= F
old
1
+ z
1
· ||v||
T
g (11)
On simplifying, we get,
F
new
1
− F
old
1
= z
1
· ||v||
T
g (12)
If the desired value of F
new
1
= (1+z) · F
old
1
. Here z is
the desired fractional increment set to an initial value
as 0.01.
F
new
1
− F
old
1
= z · F
old
1
(13)
Therefore we have
z
1
=
z · F
old
1
||v||
T
g
(14)
3.5 Deriving the Weight Updation
Scheme
We now elaborate the weight updation scheme
1. Initialization
Set F
old
1
= ε (small number). Choose z so as to
fractionally increase the value of −F
1
by 1 % in
each iteration and let z = 0.01.
2. Weight updates
For each iteration,
• Calculate the gradient from (8) and z
1
as in sec-
tion 3.4. Update the weight vector as in (9)
• Using (4), calculate the value of cost function
−F
1
.
OptimalConjugateGradientAlgorithmforGeneralizationofLinearDiscriminantAnalysisBasedonL1Norm
209
If F
1
> F
old
1
F
old
1
← F
1
Increment z as z ← 1.1 ∗ z
Save weight as w ← w
old
(Forwardstep)
Else
Decrement z as z ← 0.5 · z
Decrement z
1
as z
1
← 0.5 · z
1
Read old weight vector w
old
Save weight as w ← w
old
(Back step)
Update the weight vector as in (9)
Break
End if
end iteration
In the above pseudocode, for each weight vector,
the iterations are performed quite a number of time
until we get an optimal value of weight. We now pro-
pose the formal algorithm that incorporates the above
expressions.
3.6 Proposed Algorithm
Since every update of the weight vector leads to
the maximization of F
1
(w), setting an initial w(0) is
highly important. In our investigation, we choose
the initial vector w(0) to be the solution of the con-
ventional L
2
-LDA. Alternatively other techniques can
also be tried like re-run the OCG algorithm several
times with different initial w(0) and choosing the best
one. We now present the proposed OCG-LDA algo-
rithm as follows:
1. Initialization
Set t = 0 and w(0) s.t. ||w(0)||
2
= 1, v(−1) = 0,
X
Den
= 1. Here v is the direction vector.
2. Singularity Check
If w(t)
T
b
i
j
= 0 for some i and j, w(t) ←
w(t)+δ
||w(t)+δ||
2
.
Here, δ is a random vector with a small magni-
tude.
3. Gradient Calculation
Compute equation (8) to obtain the gradient vec-
tor g.
4. Gradient Energy
Compute gradient energy X
Num
= ||g(w)||
2
2
.
5. Coefficients for Direction Vector
Compute B
1
=
X
Num
X
Den
.
6. Direction Vector
Compute v(t) = g(w) + B
1
· v(t − 1)
7. learning Factor and Weight Updation
Calculate F
1
(w) in (4) and compute z
opt
. Update
weight vector as w(t +1) ← w(t)+z
opt
·v(t). (See
Section 3.5 for details)
8. Update for Next Iteration
Replace X
Den
with the value of X
Num
.
Set t ← t + 1.
9. Convergence Check
If
k
w(t) − w(t − 1)
k
≥ ε, then go to Step 2.
Else w
∗
= w(t) and stop iteration.
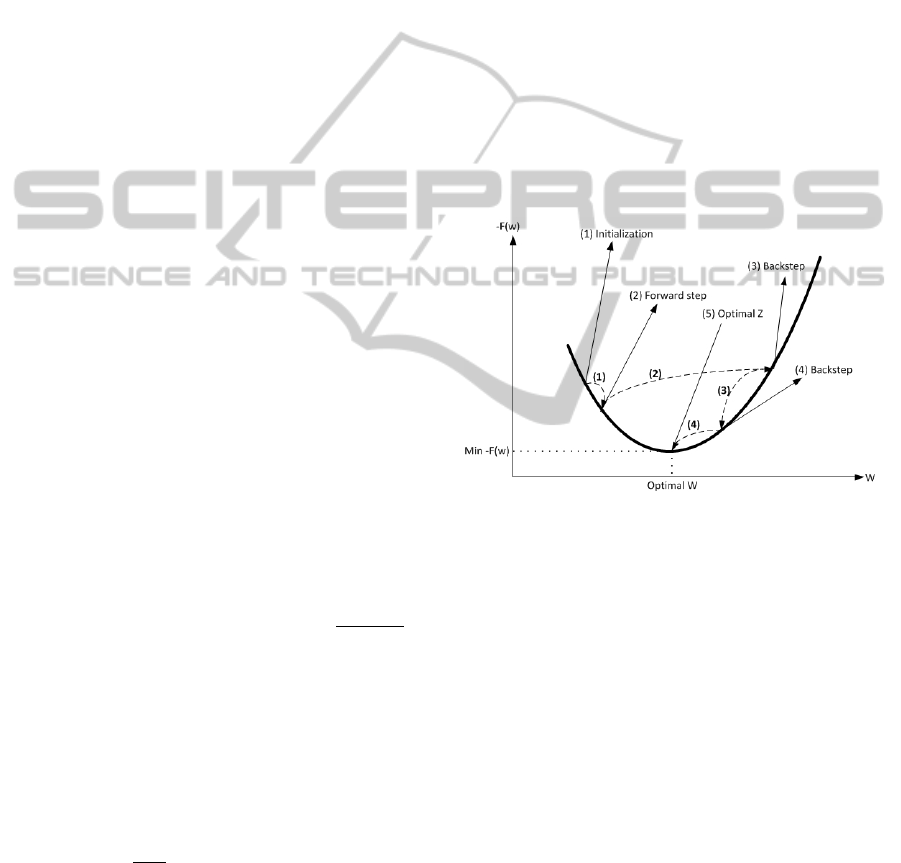
Figure 1 explains the learning factor z
1
and weight
updation calculation. We take the forward step by in-
crementing z
1
until the value of −F
1
is lower than the
previous iteration. In case the value of −F
1
is greater
for the current iteration, we take a back step to decre-
ment z
1
by half and thereby backtrack to reading the
old weight vector. It should be noted here that the
learning factor z obtained by using the above proce-
dure is optimal in a sense that its better estimate than
a heuristic approach. In Figure 1 (1), (2) are forward
step and (3), (4) are back step.
Figure 1: Calculating learning factor z
1
.
4 EXPERIMENT AND RESULTS
We now apply OCG-LDA to different datasets from
UCI machine learning repositories and compare their
performance with other algorithms. We have com-
pared the proposed methodology with two subspace
learning method (L
2
-LDA, SD-LDA) and two L
1
based least square methods. The L
2
-LDA we used,
is solved by eigenvalue decomposition. The IRLS
(Ji,2006) and L
1
regularized least square (L
1
-RLS)
(Boyd,2007) have been chosen primarily for there less
time complexity. Table 1 shows the numbers of vari-
ables, classes, and instances of each data set which is
used in this paper.
In Table 2, we present the classification perfor-
mances for OCG-LDA and it’s comparison with other
iterative algorithms. We also make the observation
that using a direction vector information rather than
the gradient vector leads to a faster performance. Not
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
210
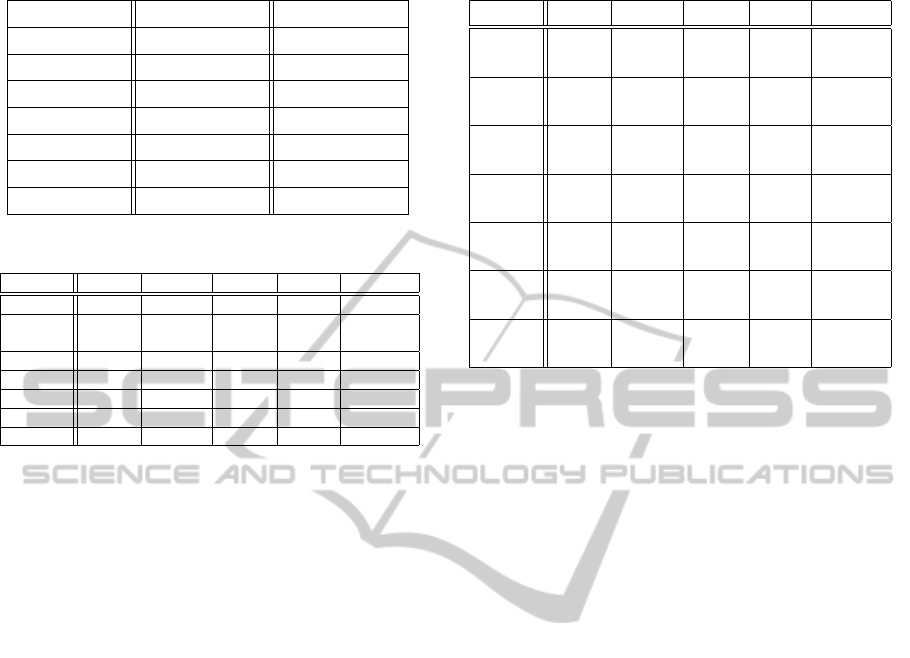
Table 1: UCI data set.
Data Set No of variables No of instances
Australian 14 690
Heart Disease 13 297
Bupa 6 345
Pima 8 768
Sonar 60 208
Balance 4 625
Waveform 21 4999
Table 2: Classification (%) for UCI data set.
Dataset ↓ L
2
LDA SD- LDA L
1
IRLS L
1
RLS OCG-LDA
Australian 76.6790 81.8834 80.0032 81.3002 82.0324
Heart Dis-
ease
75.7580 80.8506 79.2130 75.7721 81.3059
Bupa 54.2182 65.8655 62.0581 62.8991 67.8591
Pima 65.8751 71.0919 72.6371 67.8161 72.4526
Sonar 65.3810 76.8333 78.4051 72.0712 78.1261
Balance 88.9683 90.0794 87.1943 87.5292 92.0957
Waveform 52.9113 56.0905 51.3703 51.7708 58.8654
only that, varying learning factor rather than a fixed
value leads to a better results than L
1
LDA with steep-
est descent.
5 DISCUSSION
The result obtained in previous section, generates an
interesting set of findings. We observe from Table 2
that OCG-LDA is comparable in classification rate to
other learning algorithms. Except the sonar dataset,
the classification rate for OCG-LDA is better either
marginally or considerably than other subspace or
least square algorithms. The average time (in sec) is
also comparable to most of the other L
1
based algo-
rithms. Lower time complexity of L
1
algorithms is a
clear advantage over its L
2
counterpart. The average
number of iterations also bolster our argument about
the clear advantage of using OCG-LDA over other L
1
based algorithms and clearly the L
2
based SD-LDA
algorithm.
To understand the importance of the findings we
see that the weight vector in the updating scheme (17)
depends on the input feature vector. Now since we
have optimal weight updating and conjugate gradient
scheme for optimizing the weight vectors, the number
of input feature vector clearly affects the overall op-
timization scheme. This explains poor performance
of OCG-LDA for sonar dataset. As the cost func-
tion minimization involves absolute value and not a
square error, the time taken by L
1
based approach
is considerably lower than it’s L
2
method (L
2
-LDA).
Table 3: Average time (s) and average number of iterations.
Dataset ↓ L
2
LDA SD- LDA L
1
IRLS L
1
RLS OCG-LDA
Australian 0.5507 1.6717 0.7164 0.7670 0.6121
(-) (100) (3) (4) (3)
Heart 0.1240 0.1268 0.1324 0.1244 0.1242
Disease (-) (15) (5) (3) (4)
Bupa 0.1575 0.4132 0.3472 0.3120 0.2742
(-) (47) (9) (3) (5)
Pima 0.6621 1.1014 0.8274 0.9524 0.7825
(-) (58) (4) (3) (4)
Sonar 0.0783 0.5850 0.4765 0.5101 0.4956
(-) (100) (10) (4) (5)
Balance 0.4493 1.0717 0.7582 0.6823 0.6248
(-) (71) (2) (1) (1)
Waveform 26.503 4.3259 2.4462 1.3170 1.5295
(-) (11) (2) (5) (2)
An important implication of using an learning factor
and a second order optimizing scheme is that the av-
erage time and the average number of iterations are
considerably better or comparable to other L
1
and L
2
based algorithms. Updating the weight vector in L
1
subspace and guiding it with a learning factor serves
two-fold purpose. Firstly, the problem of overshoot-
ing or zigzagging of the weight vector is eliminated
as is typical in any gradient based iterative approach.
Secondly, the use of direction vector facilitates in a
much faster and efficient algorithm. What’s interest-
ing to note here is that the combination of efficient
scheme for obtaining learning factor and optimiza-
tion using CG algorithms leads to an algorithm that is
much better than SD-LDA. Not only that, OCG-LDA
is comparable to other complicated algorithms based
on L
1
regularization or iterative lease square scheme.
In order to relate the finding to those of similar
studies, our motivation came from improving the SD-
LDA by developing a better and efficient subspace al-
gorithm. The results in Table 2 and 3 clearly implies
that we have achieved our goal. The questions raised
in (Oh and Kwak, 2013) about the use of an optimal
weight updation scheme, in (Duda et al., 2012) about
overcoming the effect of outliers and comparison to
the regularized least square and iterative least square
algorithms serves as motivation for our study. An-
other aspect was to see the Gaussian distribution ef-
fect on data that is prominent in L-2 norms.
6 CONCLUSIONS
The proposed OCG-LDA algorithm uses a conjugate
gradient optimization scheme to improve the existing
SD-LDA subspace algorithm. The conjugate gradi-
OptimalConjugateGradientAlgorithmforGeneralizationofLinearDiscriminantAnalysisBasedonL1Norm
211

ent is chosen due to its advantages over first degree
optimization scheme like steepest descent and easy
implementation. We test the OCG-LDA algorithm
for various UCI datasets to demonstrate its classifi-
cation performance, average time and average itera-
tions. OCG-LDA clearly outperforms the L-2 LDA
and SD-LDA but has comparable performance with
the L-1 version of least square algorithms. However
the proposed methodology is simple and easy to im-
plement and is a good alternative to other algorithms
in building a robust model for classification. As from
No Free Lunch theorem, no single classification algo-
rithm can outperform any other algorithm when per-
formance is analyzed over many classification dataset.
In conclusion, OCG-LDA can be used as a basic clas-
sifier unit in a multi stage classification scheme.
7 FUTURE WORK
The OCG-LDA methodology is an evident advance-
ment in the L
1
family of LDA subspace algorithms.
As a part of future direction, a multiple optimal learn-
ing factor scheme based on the Gaussian Newton ap-
proximation (Malalur and Manry, 2010) can be in-
vestigated. Recently, the author (Cai et al., 2011)
have proposed an efficient partial Hessian calculation
that does not involves inversion and is successfully
applied on Radial basis function neural networks.
Therefore a study can be conducted to foray into the
second order algorithms using regularization parame-
ter.
REFERENCES
Bell, A. and sejnowski, T. (1995). An information-
maximization approach to blind separation and blind
deconvolution. Neural Computation, 7.
Cai, X., K.Tyagi, and Manry, M. (2011). An optimal con-
struction and training of second order rbf network for
approximation and illumination invariant image seg-
mentation.
Cao, L., Chua, K., Chong, W., Lee, H., and Gu, Q. (2003).
A comparison of pca, kpca and ica for dimensionality
reduction in support vector machine. Neurocomput-
ing, 55.
Chong, E. and Stanislaw, Z. (2013). An introduction to op-
timization. Wiley, USA, 3rd edition.
Claerbout, J. F. and Muir, F. (1973). Robust modeling with
erratic data.
Duda, R., Hart, P., and Stork, D. (2012). Pattern Classifica-
tion. Wiley-interscience, USA, 2nd edition.
Fisher, R. (1936). The use of multiple measurements in
taxonomic problems. Annals of Eugenics, 7(2).
Fukunaga, K. (1990). Introduction to Statistical Pattern
Recognition. Academic Press, USA, 2nd edition.
Haykin, S. (2009). Neural networks and learning machines.
Prentice Hall, USA, 3rd edition.
J. A. Scales, A. Gersztenkorn, S. T. and Lines, L. R. (1988).
Robust optimization methods in geophysical inverse
theory.
Ji, J. (2006). Cgg method for robust inversion and its appli-
cation to velocity-stack inversion.
Koren, Y. and Carmel, L. (2008). Robust linear dimension-
ality reduction. IEEE Transactions on Visualization
and Computer Graphics, 10(4):459–470.
Kwak, N. (2008). Principal component analysis based on
l-1 norm maximization. IEEE Trans. Pattern Analysis
and Machine Intelligence, 30(9):1672–1680.
Kwak, N. and Choi, C.-H. (2003). Feature extraction based
on ica for binary classification problems. IEEE Trans.
on Knowledge and Data Engineering, 15(6):1374–
1388.
Kwon, O.-W. and Lee, T.-W. (2004). Phoneme recognition
using ica-based feature extraction and transformation.
Signal Processing, 84(6).
Li, X., Hu, W., Wang, H., and Zhang, Z. (2010). Linear dis-
criminant analysis using rotational invariant l1 norm.
Neurocomputing, 73.
Malalur, S. S. and Manry, M. T. (2010). Multiple optimal
learning factors for feed-forward networks.
Oh, J. and Kwak, N. (2013). Generalization of linear dis-
criminant analysis using lp-norm. Pattern Recognition
Letters, 34(6):679–685.
Olavi, N. (1993). Convergence of iterations for linear equa-
tions. Birkhauser, USA, 3rd edition.
Sugiyama, M. (2007). Dimensionality reduction of mul-
timodal labeled data by fisher discriminant analysis.
Journal of Machine Learning Research, 8:1027–1061.
Theodoridis, S. and Koutroumbas, K. (2009). Pattern
Recognition. Academic Press, USA, 4th edition.
Turk, M. and Pentland, A. Face recognition using eigen-
faces.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
212
