
LISF: An Invariant Local Shape Features Descriptor Robust to
Occlusion
Leonardo Chang
1,2
, Miguel Arias-Estrada
1
, L. Enrique Sucar
1
and Jos
´
e Hern
´
andez-Palancar
2
1
Instituto Nacional de Astrof
´
ısica,
´
Optica y Electr
´
onica (INAOE),
Luis Enrique Erro No.1, C.P. 72840, Tonantzintla, Puebla, Mexico
2
Advanced Technologies Application Center (CENATAV), 7thA No. 21406, Playa, C.P. 12200, Havana, Cuba
Keywords:
Shape Matching, Invariant Shape Features, Shape Occlusion.
Abstract:
In this work an invariant shape features extraction, description and matching method (LISF) for binary im-
ages is proposed. In order to balance the discriminative power and the robustness to noise and occlusion in the
contour, local features are extracted from contour to describe shape, which are later matched globally. The pro-
posed extraction, description and matching methods are invariant to rotation, translation, and scale and present
certain robustness to partial occlusion. Its invariability and robustness are validated by the performed experi-
ments in shape retrieval and classification tasks. Experiments were carried out in the Shape99, Shape216, and
MPEG-7 datasets, where different artifacts were artificially added to obtain partial occlusion as high as 60%.
For the highest occlusion levels the proposed method outperformed other popular shape description methods,
with about 20% higher bull’s eye score and 25% higher accuracy in classification.
1 INTRODUCTION
Shape descriptors have proven to be useful in many
image processing and computer vision applications
(e.g., object detection (Toshev et al., 2011) (Wang
et al., 2012), image retrieval (Shu and Wu, 2011)
(Yang et al., 2013), object categorization (Trinh and
Kimia, 2011) (Gonzalez-Aguirre et al., 2011), etc.).
However, shape representation and description re-
mains as one of the most challenging topics in com-
puter vision. The shape representation problem has
proven to be hard because shapes are usually more
complex than appearance. Shape representation in-
herits some of the most important considerations in
computer vision such as the robustness with respect
to the image scale, rotation, translation, occlusion,
noise and viewpoint. A good shape description and
matching method should be able to tolerate geometric
intra-class variations, but at the same time should be
able to discriminate from objects of different classes.
Some other important requirements for a promising
shape descriptor include: computational efficiency,
compactness, and generality of applications.
In this work, we describe object shape locally, but
global information is used in the matching step to ob-
tain a trade-off between discriminative power and ro-
bustness. The proposed approach has been named In-
variant Local Shape Features (LISF), as it extracts,
describes, and matches local shape features that are
invariant to rotation, translation and scale. LISF, be-
sides closed contours, extracts and matches features
from open contours making it appropriate for match-
ing occluded or incomplete shape contours. Con-
ducted experiments showed that while increasing the
occlusion level in shape contour, the difference in
terms of bull’s eye score, and accuracy of the classifi-
cation gets larger in favor of LISF compared to other
state of the art methods.
The rest of the paper is organized as follows. Sec-
tion 2 discusses some shape description and match-
ing approaches. Section 3.1 presents the local shape
features extraction method. The features descriptor is
presented in Section 3.2. Its robustness and invari-
ability to translation, rotation, scale, and its locality
property are discussed in Section 3.3. Section 4 de-
scribes the proposed features matching schema. The
performed experiments and discussion are presented
in Section 5. Finally, Section 6 concludes the paper
with a summary of our proposed methods, main con-
tributions, and future work.
429
Chang L., Arias-Estrada M., Sucar L. and Hernández-Palancar J..
LISF: An Invariant Local Shape Features Descriptor Robust to Occlusion.
DOI: 10.5220/0004825504290437
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 429-437
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
Some recent works where shape descriptors are ex-
tracted using all the pixel information within a shape
region include Zernike moments (Kim and Kim,
2000), Legendre moments (Chong et al., 2004), and
generic Fourier descriptor (Zhang and Lu, 2002). The
main limitation of region-based approaches resides in
that only global shape characteristics are captured,
without taking into account important shape details.
Hence, the discriminative power of these approaches
is limited in applications with large intra-class varia-
tions or with databases of considerable size.
Curvature scale space (CSS) (Mokhtarian and
Bober, 2003), multi-scale convexity concavity (MCC)
(Adamek and O’Connor, 2004) and multi-scale
Fourier-based descriptor (Direkoglu and Nixon,
2011) are shape descriptors defined in a multi-scale
space. In CSS and MCC, by changing the sizes
of Gaussian kernels in contour convolution, several
shape approximations of the shape contour at differ-
ent scales are obtained. CSS uses the number of
zero-crossing points at these different scale levels.
In MCC, a curvature measure based on the relative
displacement of a contour point between every two
consecutive scale levels is proposed. The multi-scale
Fourier-based descriptor uses a low-pass Gaussian fil-
ter and a high-pass Gaussian filter, separately, at dif-
ferent scales. The main drawback of multi-scale space
approaches is that determining the optimal parameter
of each scale is a very difficult and application depen-
dent task.
Geometric relationships between sampled contour
points have been exploited effectively for shape de-
scription. Shape context (SC) (Belongie et al., 2002)
finds the vectors of every sample point to all the other
boundary points. The length and orientation of the
vectors are quantized to create a histogram map which
is used to represent each point. To make the histogram
more sensitive to nearby points than to points far-
ther away, these vectors are put into log-polar space.
The triangle-area representation (TAR) (Alajlan et al.,
2007) signature is computed from the area of the tri-
angles formed by the points on the shape boundary.
TAR measures the convexity or concavity of each
sample contour point using the signed areas of trian-
gles formed by contour points at different scales. In
these approaches, the contour of each object is repre-
sented by a fixed number of sample points and when
comparing two shapes, both contours must be repre-
sented by the same fixed number of points. Hence,
how these approaches work under occluded or un-
completed contours is not well-defined. Also, most
of these kind of approaches can only deal with closed
contours and/or assume a one-to-one correspondence
in the matching step.
In addition to shape representations, in order
to improve the performance of shape matching, re-
searchers have also proposed alternative matching
methods designed to get the most out of their shape
representations. In (McNeill and Vijayakumar, 2006),
the authors proposed a hierarchical segment-based
matching method that proceeds in a global to local
direction. The locally constrained diffusion process
proposed in (Yang et al., 2009) uses a diffusion pro-
cess to propagate the beneficial influence that offer
other shapes in the similarity measure of each pair
of shapes. (Bai et al., 2010) replace the original dis-
tances between two shapes with distances induced by
geodesic paths in the shape manifold.
Shape descriptors which only use global or local
information will probably fail in presence of trans-
formations and perturbations of shape contour. Local
descriptors are accurate to represent local shape fea-
tures, however, are very sensitive to noise. On the
other hand, global descriptors are robust to local de-
formations, but can not capture the local details of
the shape contour. In order to balance discrimina-
tive power and robustness, in this work we use lo-
cal features (contour fragments) for shape representa-
tion; later, in the matching step, in a global manner,
the structure and spatial relationships between the ex-
tracted local features are taken into account to com-
pute shapes similarity. To improve matching perfor-
mance, specific characteristics such as scale and ori-
entation of the extracted features are used. The extrac-
tion, description and matching processes are invariant
to rotation, translation and scale changes. In addition,
there is not restriction about only dealing with closed
contours or silhouettes, i.e. the method also extract
features from open contours.
The shape representation method used to de-
scribed our extracted contour fragments is similar to
that of shape context (Belongie et al., 2002). Besides
locality, the main difference between these descrip-
tors is that in (Belongie et al., 2002) the authors ob-
tain a histogram for each point in the contour, while
we only use one histogram for each contour fragment,
i.e. our representation is more compact. Unlike our
proposed method, shape context assumes a one-to-
one correspondence between points in the matching
step, which makes it more sensitive to occlusion.
The main contribution of this paper is a local
shape features extraction, description and matching
schema that i) is invariant to rotation, translation and
scaling, ii) provides a balance between distinctiveness
and robustness thanks to the local character of the ex-
tracted features, which are later matched using global
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
430

information, iii) deals with either closed or open con-
tours, and iv) is simple and easy to compute.
3 PROPOSED LOCAL SHAPE
FEATURES DESCRIPTOR
Psychological studies (Biederman and Ju, 1988) (De
Winter and Wagemans, 2004) show that humans are
able to recognize objects from fragments of contours
and edges. Hence, if the appropriate contour frag-
ments of an object are selected, they are representa-
tive of it.
Straight lines are not very discriminative since
they are only defined by their length (which is use-
less when looking for scale invariance). However,
curves provide a richer description of the object as
these are defined, in addition to its length, by its cur-
vature (a line can be seen as a specific case of a curve,
i.e., a curve with null curvature). Furthermore, in the
presence of variations such as changes in scale, rota-
tion, translation, affine transformations, illumination
and texture, the curves tend to remain present. In this
paper we use contour fragments as repetitive and dis-
criminant local features.
3.1 Features Extraction
The detection of high curvature contour fragments
is based on the method proposed by Chetverikov
(Chetverikov, 2003). Chetverikov’s method inscribes
triangles in a segment of contour points and evaluates
the angle of the median vertex which must be smaller
than α
max
and bigger than α
min
. The sides of the tri-
angle that lie on the median vertex are required to be
larger than d
min
and smaller than d
max
:
d
min
≤ ||p − p
+
|| ≤ d
max
, (1)
d
min
≤ ||p − p
−
|| ≤ d
max
, (2)
α
min
≤ α ≤ α
max
, (3)
d
min
and d
max
define the scale limits, and are set em-
pirically in order to avoid detecting contour fragments
that are known to be too small or too large. α
min
and α
max
are the angle limits that determine the min-
imum and maximum sharpness accepted as high cur-
vature. In our experiments we set d
min
= 10 pixels,
d
max
= 300 pixels, α
min
= 5
◦
, and α
max
= 150
◦
.
Several triangles can be found over the same point
or over adjacent points at the same curve, hence it is
selected the point with the highest curvature. Each
selected contour fragment i is defined by a triangle
(p
−
i
, p
i
, p
+
i
), where p
i
is the median vertex and the
points p
−
i
and p
+
i
define the endpoints of the contour
fragment. See Figure 1 (a).
The Chetverikov’s corners detector has the disad-
vantage of not being very stable to noisy contours or
highly branched contours, which may cause that false
corners are selected. For example, see Figure 1(b). In
order to deal with this problem, another restriction is
added to the Chetverikov’s method. Each candidate
triangle (p
−
k
, p
k
, p
+
k
) will grow while the points p
−
k
and p
+
k
do not match any p
j
point of another corner.
Figure 1(c) shows how this restriction overcome the
false detection in the example in Figure 1(b).
Then, each feature ς
i
extracted from the contour
is defined by hP
i
,T
i
i, where T
i
= (p
−
i
, p
i
, p
+
i
) is the
triangle inscribed in the contour fragment and P
i
=
{p
1
,..., p
n
}, p
j
∈ R
2
is the set of n points which form
the contour fragment ς
i
, ordered so that the point p
j
is
adjacent to the point p
j−1
and p
j+1
. Points p
1
, p
n
∈ P
i
match with points p
−
i
, p
+
i
∈ T
i
, respectively.
3.2 Features Description
The definition of contour fragment given by the ex-
traction process (specifically the triangle (p
−
i
, p
i
, p
+
i
))
provides a compact description of the contour frag-
ment as it gives evidence of amplitude, orientation
and length; however, it has low distinctiveness due
to the fact that different curves can share the same tri-
angle.
In order to give more distinctiveness to the ex-
tracted features, we represent each contour fragment
in a polar space of origin p
i
, where the length r and
the orientation θ of each point are discretized to form
a two-dimensional histogram of n
r
× n
θ
bins:
H
i
(b) = |{w ∈ P
i
: (w − p
i
) ∈ bin(b)}| . (4)
Note that for a sufficiently large number of n
r
and
n
θ
this is an exact representation of the contour frag-
ment.
3.3 Robustness and Invariability
Considerations
In order to have a robust and invariant description
method, several properties must be met:
Locality: the locality property is met directly
from the definitions of interest contour fragment and
its descriptor given in Sections 3.1 and 3.2. A contour
fragment and its descriptor only depend on a point and
a set of points in a neighborhood much smaller than
the image area, therefore, in both the extraction and
description processes, a change or variation in a por-
tion of the contour (produced, for example, by noise,
partial occlusion or other deformation of the object),
only affects the features extracted in that portion.
LISF:AnInvariantLocalShapeFeaturesDescriptorRobustto
Occlusion
431

(a) (b) (c)
Figure 1: (best seen in color). Detection of contour fragments. Are candidates contour fragments those contour fragments
where it is possible to inscribe a triangle with aperture between α
min
and α
max
, and adjacent sides with lengths between d
min
and d
max
. If several triangles are found on the same point or near points, the sharpest triangle in a neighborhood is selected. (b)
Noise can introduce false contour fragments (the contour fragment in yellow). (c) To counteract the false contour phenomenon
we add another restriction, candidate triangles will grow until another corner is reached.
Translation Invariance: by construction, both
the features extraction and description processes are
inherently invariant to translation since they are based
on relative coordinates of the points of interest.
Rotation Invariance: the contour fragment ex-
traction process is invariant to rotation by construc-
tion. An interest contour fragment is defined by a tri-
angle inscribed in a contour segment, which only de-
pends on the shape of the contour segment rather than
its orientation. In the description process, it is pos-
sible to achieve rotation invariance by rotating each
feature coordinate systems until alignment with the
bisectrix of the vertex p
i
.
Scale Invariance: this could be achieved in the
extraction process by extracting contour fragments at
different values of d
min
and d
max
. In the description
process it is achieved by sampling contour fragments
(i.e., P
i
) to a fixed number M of points or by normal-
izing the histograms.
4 FEATURE MATCHING
In this section we describe the method for finding cor-
respondences between LISF features extracted from
two images. Let’s consider the situation of finding
correspondences between N
Q
features {a
i
}, with de-
scriptors {H
a
i
}, extracted from the query image and
N
C
features {b
i
}, with descriptors {H
b
i
}, extracted
from the database image.
The simplest criterion to establish a match be-
tween two features is to establish a global threshold
over the distance between the descriptors, i.e., each
feature a
i
will match with those features {b
j
} which
are at distance D(a
i
,b
j
) below a given threshold. Usu-
ally, matches are restricted to nearest neighbors in or-
der to limit multiple false positives. Some intrinsic
disadvantages of this approach limit its use; such as
determining the number of nearest neighbors depends
on the specific application and type of features and
objects. The mentioned approach obviates the spatial
relations between the parts (local features) of objects,
which is a determining factor. Also, it fails in the case
of objects with multiple occurrences of the structure
of interest or objects with repetitive parts (e.g. build-
ings of several equal windows). In addition, the large
variability of distances between the descriptors of dif-
ferent features makes the task of finding an appropri-
ate threshold a very difficult task.
To overcome the previous limitations, we propose
an alternative for feature matching that takes into ac-
count the structure and spatial organization of the fea-
tures. The matches between the query features and
database features are validated by rejecting casual or
wrong matches.
Finding Candidate Matches. Let’s first define
the scale and orientation of a contour fragment.
Let the feature ς
i
be defined by hP
i
,T
i
i, its scale
s
ς
i
is defined as the magnitude of the vector p
+
i
+ p
−
i
,
where p
+
i
and p
−
i
are the vectors with initial point in
p
i
and terminal points in p
+
i
and p
−
i
, respectively, i.e.,
s
ς
i
= |p
+
i
+ p
−
i
|. (5)
The orientation φ
ς
i
of the feature ς
i
is given by the
direction of vector p
i
, which we will call orientation
vector of feature ς
i
, and is defined as the vector that is
just in the middle of vector p
+
i
and vector p
−
i
, i.e.,
p
i
=
ˆ
p
+
i
+
ˆ
p
−
i
, (6)
where
ˆ
p
+
i
and
ˆ
p
−
i
are the unit vectors with same di-
rection and origin that p
+
i
and p
−
i
, respectively.
We already defined the terms scale and orientation
of a feature ς
i
. In the process of finding candidate
matches, for each feature a
i
, its K nearest neighbors
{b
K
j
} in the candidate image are found by comparing
their descriptors (in this work we use χ
2
distance to
compare histograms). Our method tries to find among
the K nearest neighbors the best match (if any), so K
can be seen as an accuracy parameter. To provide the
method with rotation invariance the feature descrip-
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
432
tors are normalized in terms of orientation. This nor-
malization is performed by rotating the polar coordi-
nate system of each feature by a value equal to −φ
ς
i
(i.e., all features are set to orientation zero) and cal-
culated their descriptors. The scale and translation in-
variance in the descriptors is accomplished by con-
struction (for details see Section 3.2).
Rejecting Casual Matches. For each pair
ha
i
,b
k
j
i, the query image features {a
i
} are aligned ac-
cording to this correspondence:
a
0
i
= (a
i
· s + t)· R(θ(a
i
,b
k
j
)), (7)
where s = s
a
i
/s
b
K
j
is the scale ratio between the fea-
tures a
i
and b
k
j
, t = p
a
i
− p
b
k
j
is the translation vector
from point p
a
i
to point p
b
j
k
, and R(θ(a
i
,b
k
j
)) is the ro-
tation matrix for a rotation, around point p
a
i
, equal
to the direction of the orientation vector of feature a
i
with respect to the orientation of b
k
j
, (i.e., φ
a
i
− φ
b
k
j
).
Once aligned both images (same scale, rotation
and translation) according to correspondence ha
i
,b
k
j
i,
for each feature a
0
i
its nearest neighbor b
v
in {b
k
j
} is
found. Then, vector m defined by (l,ϕ) is calculated,
where l is the distance from point p
b
v
of feature b
v
to a reference point p
•
in the candidate object (e.g.,
the object centroid, the point p of some feature or any
other point, but always the same point for every candi-
date image) and ϕ is the orientation of feature b
v
with
respect to the reference point p
•
, i.e., the angle be-
tween the orientation vector p
b
v
of feature b
v
and the
vector p
•
, the latter defined from point p
b
v
to point
p
•
,
l = ||p
b
v
− p
•
||, (8)
ϕ = arccos
p
b
v
· p
•
||p
b
v
|| ||p
•
||
. (9)
Having obtained m, the point p
◦
, given by the
point at a distance l from point p
a
0
i
of feature a
0
i
and
orientation ϕ respect to its orientation vector p
a
0
i
, is
found,
p
x
◦
= p
x
a
0
i
+ l · cos(φ
a
0
i
+ ϕ), (10)
p
y
◦
= p
y
a
0
i
+ l · sin(φ
a
0
i
+ ϕ). (11)
Intuitively, if ha
i
,b
k
j
i is a correct match, most of
the points p
◦
should be concentrated around the point
p
•
. This idea is what allows us to accept or reject a
candidate match ha
i
,b
k
j
i. With this aim, we defined a
matching measure Ω between features a
i
and b
k
j
as a
measure of dispersion of points p
◦
around point p
•
,
Ω =
s
∑
N
Q
i=1
||p
i
◦
− p
•
||
2
N
Q
. (12)
Using this measure, Ω, we can determine the best
match for each feature a
i
of the query image in the
candidate image, or reject any weak match having Ω
above a given threshold λ
Ω
. A higher threshold means
supporting larger deformations of the shape, but also
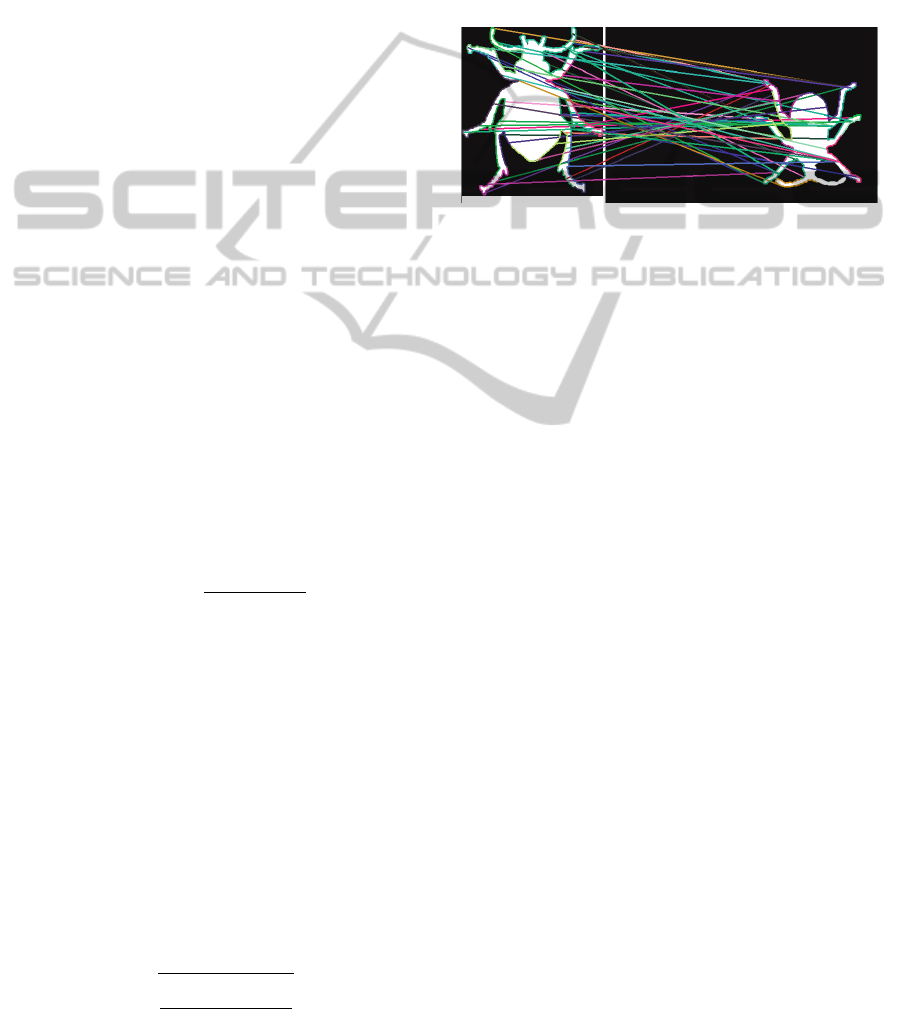
more false matches. In Figure 2, the matches between
features extracted from silhouettes of two different in-
stances of the same object class are shown, the robust-
ness to changes in scale, rotation and translation can
be appreciated.
Figure 2: Matches between local shape descriptors in two
images. It can be seen how these matches were found even
in presence of rotation, scale and translation changes.
5 EXPERIMENTAL RESULTS
Performance of the proposed LISF method has been
evaluated on three different well-known datasets. The
fist dataset is the Kimia Shape99 dataset (Sebastian
et al., 2004), which include nine categories and eleven
shapes in each category with variations in form, oc-
clusion, articulation and missing parts. The sec-
ond dataset is the Kimia Shape216 dataset (Sebastian
et al., 2004). The database consists of 18 categories
with 12 shapes in each category. The third dataset
is the MPEG-7 CE-Shape-1 dataset (Latecki et al.,
2000). The database consists of 1400 images (70 ob-
ject categories with 20 instances per category). In the
three datasets, in each image there is only one object,
defined by its silhouette, and at different scales and
rotations. Example shapes are shown in Figure 3.
In order to show the robustness of the LISF
method to partial occlusion in the shape, we generated
another 15 datasets by artificially introducing occlu-
sion of different magnitudes (10%, 20%, 30%, 45%
and 60%) to the Shape99, Shape216 and MPEG-7
datasets. Occlusion was added by randomly choos-
ing rectangles that occlude the desired portion of the
shape contour. A sample image from the MPEG-7
dataset at different occlusion levels is shown in Fig-
ure 4.
As a measure to evaluate and compare the perfor-
mance of the proposed shape matching schema in a
shape retrieval scenario we use the so-called bull’s
LISF:AnInvariantLocalShapeFeaturesDescriptorRobustto
Occlusion
433
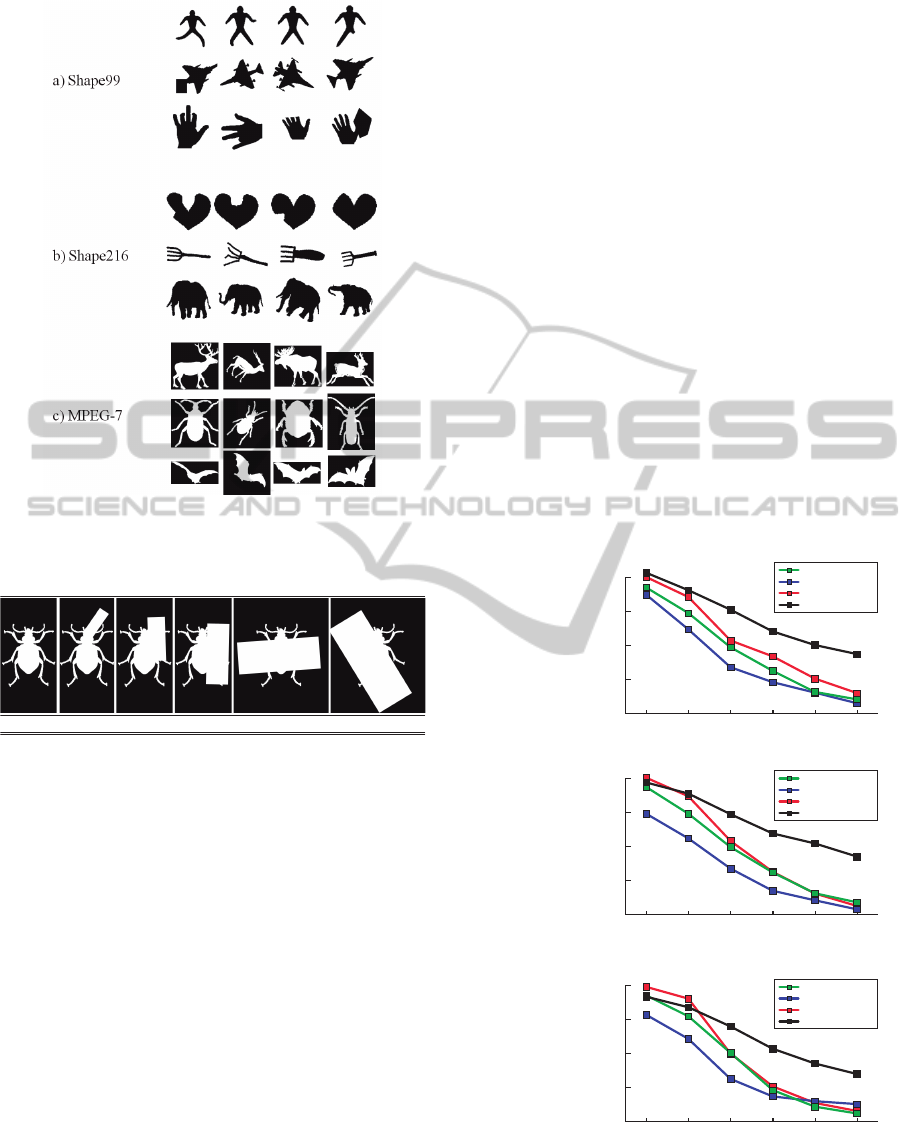
Figure 3: Example images and categories from a) the
Shape99 dataset, b) the Shape216 dataset, and c) the
MPEG-7 dataset.
0% 10% 45%30%20% 60%
Figure 4: Example image from the MPEG-7 dataset with
different levels of occlusion (0%, 10%, 20%, 30%, 45%
and 60%) used in the experiments.
eye score. Each shape in the database is compared
with every other shape, and the number of shapes of
the same class that are among the 40 most similar is
reported. The bull’s eye score is the ratio between
the total number of shapes of the same class and the
largest possible value.
The results obtained by LISF (n
r
= 5, n
θ
= 10,
λ
Ω
= 0.9) were compared with those of the popular
shape context descriptor (100 points, n
r
= 5, n
θ
= 12)
(Belongie et al., 2002), the Zernike moments (using
47 features) (Khotanzad and Hong, 1988) and the
Legendre moments (using 66 features) (Chong et al.,
2004). Rotation invariance can be achieve by shape
context, but it has several drawbacks, as mentioned
in (Belongie et al., 2002). In order to perform a fair
comparison between LISF method (which is rotation
invariant) and shape context, in our experiments the
non-rotation invariant implementation of shape con-
text is used, and images used by shape context were
rotated so that the objects had the same rotation.
Motivated by efficiency issues, for the MPEG-7
CE-Shape-1 dataset we used only 10 of the 70 cate-
gories (selected randomly) with its 20 samples each.
The bull’s eye score implies all-against-all compar-
isons and experiments had to be done across the 18
datasets for the LISF, shape context, Zernike mo-
ments and Legendre moments methods. There is no
loss of generality in using a subset of the MPEG-7
dataset since the aim of the experiment is to compare
the behavior of the LISF method against other meth-
ods, across increasing levels of occlusion.
As a similarity measure of image a with image
b, with local features {a
i
} and {b
j
} respectively, we
use the ratio between the number of features in {a
i
}
that found matches in {b
j
} and the total number of
features extracted from a.
Figure 5 shows the behavior of the bull’s eye score
of each method while increasing partial occlusion in
the Shape99, Shape216 and MPEG-7 datasets. Bull’s
eye score is computed for each of the 18 datasets in-
dependently.
30
45
60
75
90
0 45302010 60
bull’s eye score (%)
bull’s eye score (%)
partial occlusion (%)
0 45302010 60
partial occlusion (%)
30
45
60
75
90
0 45302010 60
bull’s eye score (%)
partial occlusion (%)
LISF
Shape context
Zernike moments
Legendre moments
a) Shape99
b) Shape216
c) MPEG-7
30
45
60
75
90
LISF
Shape context
Zernike moments
Legendre moments
LISF
Shape context
Zernike moments
Legendre moments
Figure 5: (best seen in color). Bull’s eye score comparison
between LISF, shape context, Zernike moments and Legen-
dre moments in the a) Shape99, b) Shape216 and c) MPEG-
7 datasets with different partial occlusions (0%, 10%, 20%,
30%, 45% and 60%).
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
434

As expected, the LISF method outperforms the
shape context, Zernike moments and Legendre mo-
ments methods. Moreover, while increasing the oc-
clusion level, the difference in terms of bull’s eye
score gets bigger, with about 15 - 20% higher bull’s
eye score across highly occluded images; which
shows the advantages of the proposed method over
the other three.
Figure 6 shows the top 5 retrieved images and
its retrieval score for the beetle-5 image with differ-
ent occlusions. Top 5 retrieved images are shown
for each database at different occlusion levels, re-
spectively (MPEG-7 with 0% to 60% partial occlu-
sion). The robustness to partial occlusion of the LISF
method can be appreciated. Retrieval score of images
that do not belong to the same class as the query im-
age are depicted in red.
0%
10%
20%
30%
45%
60%
Occlusion Query Top 5 retrieved images
0.8651 0.7222 0.6587 0.6349 0.6111
0.7442 0.5481 0.4921 0.4902 0.4902
0.6863 0.6320 0.6316 0.6017 0.5593
0.5941 0.5728 0.5682 0.5492 0.5322
0.5545 0.5192 0.5128 0.5091 0.4909
0.5195 0.5172
0.5057 0.5055 0.4943
Figure 6: Top 5 retrieved images and similarity score. In
each row retrieval results for the beetle-5 image in the six
MPEG-7 based databases. Red retrieval scores represent
images that do not belong to the same class of the query
image.
In a second set of experiments, the proposed
method is tested and compared to shape context,
Zernike moments and Legendre moments in a classi-
fication task also under varying occlusion conditions.
A 1-NN classifier was used, i.e., we assigned to each
instance the class of its nearest neighbor. The same
data as in the first set of experiments is used. In order
to measure the classification performance, accuracy
measure was used. Accuracy is the percentage of data
that are correctly classified. Figure 7 shows the results
of classification under different occlusion magnitudes
(0%, 10%, 20%, 30%, 45% and 60% occlusion).
In this set of experiments, a better performance of
the LISF method compared to previous work can also
be appreciated. As in the shape retrieval experiment,
while increasing the occlusion level in the test images,
the better is the performance of the proposed method
with respect to shape context, Zernike moments and
Legendre moments, with more than 25% higher re-
sults in accuracy.
85
90
95
100
0 45302010 60
accuracy (%)
partial occlusion (%)
85
90
95
100
0 45302010 60
accuracy (%)
partial occlusion (%)
85
90
95
100
0 45302010 60
accuracy (%)
partial occlusion (%)
a) Shape99
b) Shape216
c) MPEG-7
LISF
Shape context
Zernike moments
Legendre moments
LISF
Shape context
Zernike moments
Legendre moments
LISF
Shape context
Zernike moments
Legendre moments
Figure 7: (best seen in color). Classification accuracy com-
parison between LISF, shape context, Zernike moments and
Legendre moments in the a) Shape99, b) Shape 216, and
c) MPEG-7 dataset, with different partial occlusions (0%,
10%, 20%, 30%, 45% and 60%).
The computation time of LISF has been also eval-
uated, and compared to other methods. Table 1 shows
the comparison of LISF computation time against
shape context, Legendre moments, and Zernike mo-
ments. The reported times correspond to the average
time needed to describe and match two shapes of the
MPEG-7 database over 500 runs. These results were
obtained on a single thread of a 2.2 GHz processor
and 8Gb RAM PC. As can be seen in Table 1, LISF
LISF:AnInvariantLocalShapeFeaturesDescriptorRobustto
Occlusion
435

Table 1: Average feature extraction and matching time for
two images of the MPEG7 database, in seconds.
Method Computation time (s)
Shape context 2.66
Legendre moments 7.48
Zernike moments 26.47
LISF 0.47
is the least time-consuming method compared with
shape context, Legendre moments, and Zernike mo-
ments.
6 CONCLUSIONS AND FUTURE
WORK
As a result of this work, a method for shape features
extraction, description and matching, invariant to ro-
tation, translation and scale, have been developed.
The proposed method allows us to overcome the in-
trinsic disadvantages of only using local or global fea-
tures by capturing both local and global information.
The conducted experiments supported the mentioned
contributions, showing larger robustness to partial oc-
clusion than other methods in the state of the art. It
is also more efficient in terms of computational time
than the other techniques.
Moreover, the feature extraction process does not
depend on accurate and perfect object segmentation
since the features are extracted from both the contour
and the internal edges of the object. Therefore, the
method has great potential for use in “real” images
(RGB or grayscale images) and also, as a complement
to certain limitations of appearance based methods
(e.g., SIFT, SURF, etc.); particularly in object cate-
gorization, where shape features usually offer a more
generic description of objects. Future work will focus
on this subject.
ACKNOWLEDGEMENTS
This project was supported in part by CONACYT
grant Ref. CB-2008/103878 and by Instituto Na-
cional de Astrof
´
ısica,
´
Optica y Electr
´
onica. L. Chang
was supported in part by CONACYT scholarship No.
240251.
REFERENCES
Adamek, T. and O’Connor, N. E. (2004). A multiscale
representation method for nonrigid shapes with a sin-
gle closed contour. IEEE Trans. Circuits Syst. Video
Techn., 14(5):742–753.
Alajlan, N., Rube, I. E., Kamel, M. S., and Freeman, G.
(2007). Shape retrieval using triangle-area representa-
tion and dynamic space warping. Pattern Recognition,
40(7):1911 – 1920.
Bai, X., Yang, X., Latecki, L. J., Liu, W., and Tu, Z. (2010).
Learning context-sensitive shape similarity by graph
transduction. IEEE Trans. Pattern Anal. Mach. Intell.,
32(5):861–874.
Belongie, S., Malik, J., and Puzicha, J. (2002). Shape
matching and object recognition using shape contexts.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 24(4):509–522.
Biederman, I. and Ju, G. (1988). Surface versus edge-based
determinants of visual recognition. Cognitive Psy-
chology, 20(1):38–64.
Chetverikov, D. (2003). A Simple and Efficient Algo-
rithm for Detection of High Curvature Points in Planar
Curves. Proceedings of the 23rd Workshop of the Aus-
trian Pattern Recognition Group, pages 746–753.
Chong, C.-W., Raveendran, P., and Mukundan, R. (2004).
Translation and scale invariants of legendre moments.
Pattern Recognition, 37(1):119–129.
De Winter, J. and Wagemans, J. (2004). Contour-based ob-
ject identification and segmentation: stimuli, norms
and data, and software tools. Behavior research meth-
ods instruments computers. A journal of the Psycho-
nomic Society Inc, 36(4):604–624.
Direkoglu, C. and Nixon, M. (2011). Shape classifica-
tion via image-based multiscale description. Pattern
Recognition, 44(9):2134–2146.
Gonzalez-Aguirre, D. I., Hoch, J., Rhl, S., Asfour, T.,
Bayro-Corrochano, E., and Dillmann, R. (2011). To-
wards shape-based visual object categorization for hu-
manoid robots. In ICRA, pages 5226–5232. IEEE.
Khotanzad, A. and Hong, Y. H. (1988). Rotation invariant
pattern recognition using zernike moments. Pattern
Recognition, 1988., 9th International Conference on,
pages 326–328 vol.1.
Kim, W.-Y. and Kim, Y.-S. (2000). A region-based shape
descriptor using zernike moments. Signal Processing:
Image Communication, 16(12):95 – 102.
Latecki, L. J., Lakmper, R., and Eckhardt, U. (2000). Shape
descriptors for non-rigid shapes with a single closed
contour. In CVPR, pages 1424–1429. IEEE Computer
Society.
McNeill, G. and Vijayakumar, S. (2006). Hierarchical pro-
crustes matching for shape retrieval. In CVPR (1),
pages 885–894. IEEE Computer Society.
Mokhtarian, F. and Bober, M. (2003). Curvature Scale
Space Representation: Theory, Applications, and
MPEG-7 Standardization. Kluwer.
Sebastian, T. B., Klein, P. N., and Kimia, B. B. (2004).
Recognition of shapes by editing their shock graphs.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 26(5):550–571.
Shu, X. and Wu, X.-J. (2011). A novel contour descriptor
for 2D shape matching and its application to image
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
436

retrieval. Image and Vision Computing, 29(4):286–
294.
Toshev, A., Taskar, B., and Daniilidis, K. (2011). Shape-
based Object Detection via Boundary Structure Seg-
mentation. International Journal of Computer Vision,
99(2):123–146.
Trinh, N. H. and Kimia, B. B. (2011). Skeleton Search:
Category-Specific Object Recognition andSegmenta-
tion Using a Skeletal Shape Model. International
Journal of Computer Vision, 94(2):215–240.
Wang, X., Bai, X., Ma, T., Liu, W., and Latecki, L. J.
(2012). Fan shape model for object detection. In
CVPR, pages 151–158. IEEE.
Yang, X., Bai, X., Kknar-Tezel, S., and Latecki, L. (2013).
Densifying distance spaces for shape and image re-
trieval. Journal of Mathematical Imaging and Vision,
46(1):12–28.
Yang, X., Kknar-tezel, S., and Latecki, L. J. (2009). Locally
constrained diffusion process on locally densified dis-
tance spaces with applications to shape retrieval. In
In: Proc. IEEE Conf. on Computer Vision and Pattern
Recognition (CVPR.
Zhang, D. and Lu, G. (2002). Shape based image retrieval
using generic fourier descriptors. In Signal Process-
ing: Image Communication 17, pages 825–848.
LISF:AnInvariantLocalShapeFeaturesDescriptorRobustto
Occlusion
437
