
FacialStereo: Facial Depth Estimation from a Stereo Pair
Gagan Kanojia and Shanmuganathan Raman
Electrical Engineering, Indian Institute of Technology Gandhinagar, Ahmedabad, India
Keywords:
Sparse Stereo, Active Shape Model, Face Detection.
Abstract:
Consider the problem of sparse depth estimation from a given stereo image pair. This classic computer vision
problem has been addressed by various algorithms over the past three decades. The traditional solution is
to match the feature points in two images to estimate the disparity and therefore the depth. In this work, we
consider a special case of scenes which have people with their front-on faces visible to the camera and we want
to estimate how far a person is from the camera. This paper proposes a novel method to identify the depth of
faces and even the depth of a single facial feature (eyebrows, eyes, nose, and lips) of a person from the camera
using a stereo pair. The proposed technique employs active shape models (ASM) and face detection. ASM is
a model-based technique consisting of a shape model which contains the data regarding the valid shapes of a
face and a profile model which contains the texture of the face to localize the facial features in the stereo pair.
We shall demonstrate how depth of faces can be obtained by the estimation of disparities from the landmark
points.
1 INTRODUCTION
Human visual system can easily perceive the three di-
mensional information of the world. We can iden-
tify the shapes of different objects and their relative
distances with ease. While capturing an image, we
project the 3D visual data into the 2D space. During
this process, we lose valuable information regarding
the distance of an object from the camera. Although
by looking at an image, one can identify which object
is nearer and which one is farther, but the computers
can not do so and estimate their actual positions in the
3D world.
This paper describes a novel technique to estimate
the position of a person and his facial features (eye-
brows, eyes, nose, and lips) in the 3D world. For this
purpose, the concepts of stereo matching and dispar-
ity are used. The variability of shapes of faces and
facial features leads to the need of a flexible model
which allows some degree of variability. It should
also be able to deal with the varying complexion
through different faces. This need motivated the use
of active shape models (ASM) to process the facial
images in a scene as they modify themselves accord-
ing to the structure of face and facial features irre-
spective of the complexion of the skin (Cootes et al.,
1995).
The commercially available cameras available to-
day have a built-in face detection module to achieve
proper focusing of the salient people in the scene.
The present work targets the utilization of this mod-
ule to also report the depth of the persons in the
scene. Though we assume in the present work that
the epipoles of the stereo pair captured are at infinity,
we can use this approach even otherwise after rectify-
ing the stereo pair (Hartley and Zisserman, 2004).
The most significant contributions of this paper
are listed below.
1. Stereo image pair is used to estimate sparse depth
of the faces in images. Concept of stereo disparity
is used to estimate depth.
2. ASM is employed to obtain the contours of face
and facial features using user specified landmark
points.
3. The proposed approach does not require detection
of feature points using techniques such as scale
invariant feature transform (SIFT) and corner de-
tectors (Tuytelaars and Mikolajczyk, 2008).
4. The proposed approach is fully automatic and can
be built into a stereo imaging system for detecting
depth of the people in a given scene.
The rest of the paper is organized as below. The
section 2 describes the previous works performed re-
lated to the proposed approach. We shall discuss the
necessary background regarding the ASM for con-
686
Kanojia G. and Raman S..
FacialStereo: Facial Depth Estimation from a Stereo Pair.
DOI: 10.5220/0004826006860691
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 686-691
ISBN: 978-989-758-009-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

verging on the facial contours in section 3. The pro-
posed approach for determining depth of the people
present in the scene is explained in section 4. We shall
demonstrate the usefulness of the proposed approach
for different scenes in section 5. We shall conclude
this paper by giving future directions in section 6.
2 PREVIOUS WORK
Marr and Poggio were the first to propose an ap-
proach to perform stereo matching between two views
of the same scene (Marr and Poggio, 1971). They
showed how one can recover the depth of objects in
a scene by estimating stereo disparity (Barnard and
Fischler, 1982). The disparity can also be estimated
by using a window of adaptive size and thereby estab-
lishing correspondence (Kanade and Okutomi, 1994).
Stereo vision algorithms establish correspondence be-
tween two views of the scene using epipolar con-
straints (Hartley and Zisserman, 2004). A lot of al-
gorithms use this idea to estimate the depth of objects
in a scene (Scharstein and Szeliski, 2002). Recently,
Chakraborty et al. developed a technique to classify
people interactions known as proxemics (Chakraborty
et al., 2013). They categorized the scene on the basis
of the distance between the people in the images.
Cootes et al. proposed a model-based technique
called active shape models (ASM) to deal with the
variability of the patterns (Cootes et al., 1995). To
achieve this challenging task, they built a model from
a training set of annotated images through learning.
This model is flexible enough to deal with the proba-
ble variation within a class of images. ASM approach
was further enhanced in the active appearance models
(AAM) (Cootes et al., 2001). ASM and AAM enable
one to model the contours of the various features of a
face image.
Viola and Jones proposed an approach for a rapid
object detection (Viola and Jones, 2004). They de-
veloped a machine learning approach which involves
efficient classifier by combining the power of a num-
ber of weak classifiers. Face recognition is one of the
challenging tasks in computer vision research (Zhao
et al., 2003). The stereo vision has primarily been
used for face and gesture recognition tasks in re-
cent years (Matsumoto and Zelinsky, 2000). A dense
depth recovery system from stereo images is proposed
by Hoff and Ahuja (Hoff and Ahuja, 1989).
In this work, we concentrate on the sparse recov-
ery of depth in few selected feature points as our ob-
jective is to estimate the distance of a person or the
feature from the camera. We shall first discuss the ap-
plication of ASM to estimate the facial contour from
the images containing human faces.
3 FACIAL CONTOURS USING
ACTIVE SHAPE MODEL
This section provides the 2D formulation of ASM. It
is comprised of two models i.e. shape model and pro-
file model.
Figure 1: Shape and normals along which gray values are
extracted for three different resolutions i.e. 360 ×480,
180 ×240 and 90 ×120 (in pixels) of a facial image.
3.1 Shape Model
A shape is a set of n ×2 ordered points where n is
the number of landmark points which signify differ-
ent locations marked in a face contour. Even after
operations like scaling, rotation and translation on a
shape, it retains the original shape. For this purpose,
the shape is scaled such that k x k= 1, so that the size
of the face does not affect the process. A shape is
considered as a 2n dimensional vector x
x = (x
1
, y
1
, x
2
, y
2
, .....,x
n
, y
n
), (1)
where x
n
and y
n
are the coordinates of the landmark
points.
A training set is taken with different shapes cor-
responding to different faces. To start with, they are
aligned by scaling, rotating and translating the shape
using a similarity transformation.
x
t
y
t
=
scos θ ssin θ
−ssin θ scos θ
+
x
tr
y
tr
(2)
where, x
t
and y
t
are the transformed x and y coordi-
nates, s is the scaling factor, θ is the angle of rotation
and x
tr
and y
tr
are the translation factors.
Then the mean shape
¯x =
1
n
n
∑
i=1
x
i
(3)
FacialStereo:FacialDepthEstimationfromaStereoPair
687

Figure 2: Stereo image pair of a scene which has multiple faces at different depths. The images are of size 4608×3456 pixels.
Figure 3: Stereo image pair after the proposed algorithm is applied. On both the images, the obtained active shape contours
and the landmark points are displayed.
and covariance is computed
S =
1
n −1
n
∑
i=1
(x
i
− ¯x)(x
i
− ¯x)
T
(4)
where, n is the number of shapes in the training set.
The shape can be approximated as
ˆx = ¯x + bΦ (5)
where ¯x is the mean shape, Φ is the matrix of eigen-
vectors of covariance matrix and b is a vector. The
value of b is constrained to be between ±m
√
λ,
where, m is either 2 or 3 and λ is a vector having
eigenvalues as its elements, to generate a face-like
structure.
Principal component analysis (PCA) is applied on
the ordered eigenvalues and the corresponding eigen-
vectors so that only significant eigenvectors remain
and also for the removal of noise components.
3.2 Profile Model
This model describes the one dimensional pixel pro-
file around a landmark point. Its job is to give the
best approximate shape according to the given image
when a suggested shape by the shape model is given.
For the purpose, gray scale pixel values are used
as the profile data. In this, we sample the image at
each landmark point along the normal to the contour
and extract k values on both sides of the landmark
point as shown in Fig.1. This way we get a profile
of 2k + 1 values. Then, for the profile model, mean
profile ¯g and the covariance matrix S
g
is computed
for each landmark point across all the images in the
training set.
4 SPARSE FACIAL DEPTH
ESTIMATION
Let us consider a stereo image pair of a scene which
contains facial images as shown in Fig.2. We shall
explain why stereo image pair is taken and how depth
can be calculated from them soon. On the given im-
ages, Viola-Jones face detector is applied to detect
faces within the scene (Viola and Jones, 2004). This
detector detects all the face-like structures present in
the image. They may or may not correspond to an
actual face. To increase the probability of getting an
actually face, an eye detector is applied on the face-
like structure detected by the face detector. If it de-
tects eyes in the detected face-like region, then it is
considered as a face else it will be discarded.
On the detected face region, the mean shape sug-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
688
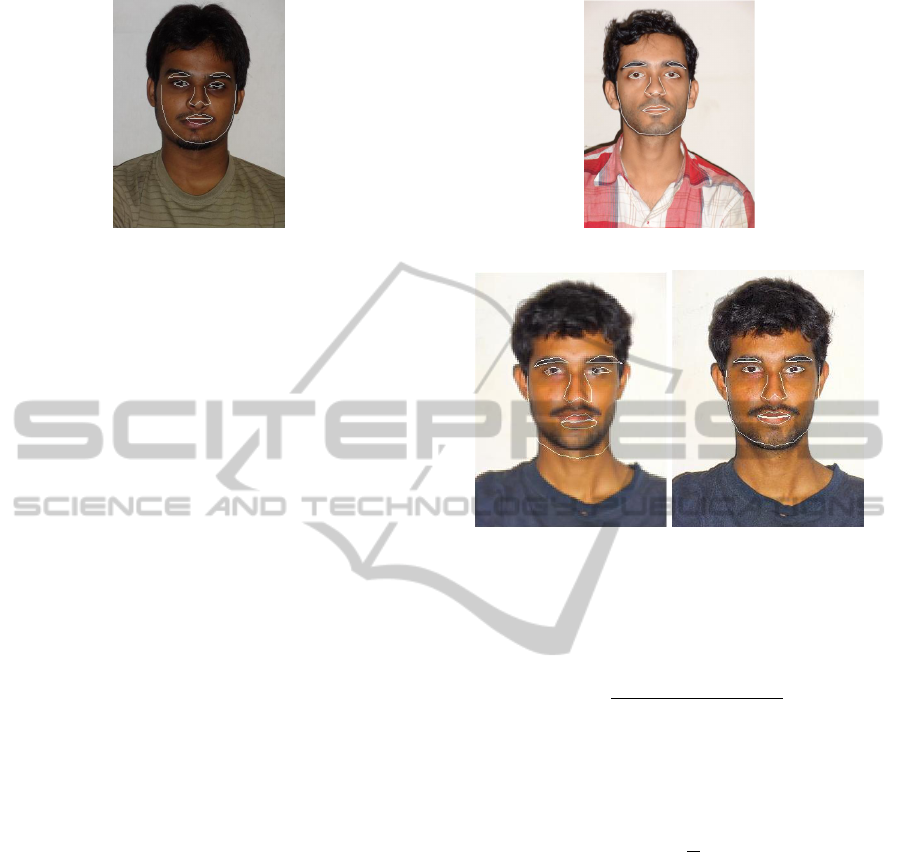
Figure 4: Estimated mean shape from the training set is
placed on the face detected using Viola-Jones face detec-
tion algorithm. The image size is 3456 ×4608 pixels.
gested by the shape model is placed (i.e. the mean
shape calculated from the training shapes) after scal-
ing it up in accordance with the coordinates (approxi-
mate width of the eye region) provided by the eye de-
tector (since the shapes are scaled such that kx k= 1).
After placing the shape on the image, the output im-
age will look like the one shown in Fig.4. Then the
image is sampled at each landmark point along the
normals to the contour and p values are extracted on
both sides of the landmark point such that p > k. In
this case, gray scale pixel values are extracted. This
way a search profile gets created for each landmark
point. Along this search profile, a profile of k val-
ues is found which matches best the model profile.
For this, Mahalanobis distance is computed by mov-
ing the model profile ¯g along the search profile.
r = (g − ¯g)
T
S
−1
g
(g − ¯g) (6)
where, r is the Mahalanobis distance. The landmark
points get moved along the normal to their new
location corresponding to the minimum Mahalanobis
distance. Then the constraints are applied on the
shape which is obtained after moving each landmark
point independently to their new location in accor-
dance to the equation (5) to get a face-like shape.
By doing this iteratively, a shape surrounding the
contours of all face features is obtained. To get
better results, multi-resolution approach is used in
which the above algorithm is applied on different
resolutions of the same image moving from coarse to
fine level. In this the result obtained in coarse level is
taken as reference for the next level.
After obtaining the contours of all face features
successfully in each of the stereo images, the mean
positions of face and facial features of each face in
the given images are calculated. This is done by tak-
ing the mean of the coordinates of the points encir-
cling them. After getting the mean positions, dispar-
ity among the corresponding faces and facial features
Figure 5: Contours obtained on a facial image.
Figure 6: Contours obtained on the same images of different
spatial resolutions. The left image is of poor quality with
resolution 90 ×120 pixels while the right image has better
quality with resolution 360 ×480 pixels.
in the stereo image pair is computed. Disparity can be
calculated by computing the Euclidean distance.
d =
q
(x
i
−x
j
)
2
+ (y
i
−y
j
)
2
(7)
where (x
i
, y
i
) and (x
j
, y
j
) are the coordinates of a sin-
gle point in the two stereo images. Then, depth is
computed using the following relation.
Z = f
B
d
(8)
where, Z is the depth, f is the focal length of the imag-
ing system in pixels, B is the baseline between the
stereo cameras, and d is the disparity in pixels be-
tween a pair of landmark points. We shall assume that
we know the focal length and the baseline distance for
a given stereo pair.
5 RESULTS AND DISCUSSION
The 1-D search along the normals make sure that the
obtained contours in the both the images (stereo pair)
are same. As the initial shape i.e. the mean shape, is
same in both the cases, so for the frontal images of
the same person the contour obtained is same. So, the
difference in the coordinates of the landmark points is
FacialStereo:FacialDepthEstimationfromaStereoPair
689

Figure 7: The obtained active shape contours and the landmark points on the stereo image pair of size 4608 ×3456 each.
Figure 8: The obtained active shape contours and the landmark points on the stereo image pair of size 4608 ×3456 each.
mainly due to inter-camera distance. The difference
due to the change in the shape of contours obtained
can be minimized by keeping the inter-camera dis-
tance low (approx. 5cm). If the faces are quite close
to the camera as shown in Fig. 8 (or faces are zoomed
in) then to get better results the face should be at the
axis which will perpendicularly bisect the line joining
the two cameras but if the faces are at an appreciable
distance as shown in Fig. 2 then there is no need of it.
The proposed approach is applied on the stereo
image pair shown in Fig. 2. After the algorithm is
applied, image pair shown in Fig. 3 is obtained. From
the stereo pair in Fig. 3, it can be observed that all the
four faces are detected and the contours of facial fea-
tures are successfully obtained in all the faces. From
the Fig. 3, we can easily observe that the proposed
algorithm is independent of facial color complexion.
It also works fine on the faces with beard and mous-
tache.
The training set contains 28 images that has been
manually landmarked with 76 points. As by just look-
ing at the Fig. 2 , it can be perceived that the face
marked as 1 is closest to camera and the face marked
as 2 is farthest. The images shown in Fig. 2 are of size
4608 ×3456 pixels and the associated focal length
and baseline are 4.5mm (2668.7 pixels) and 10cm re-
spectively. The disparity obtained for each face are
232, 177.2, 191.8 and 221.2 (in pixels) respective to
the numbering. The depth of each face computed by
the algorithm are 115.03, 150.64, 139.12 and 120.65
(in cm) respective to the numbering. The algorithm
was implemented using MATLAB R2103a on a lap-
top with i5 processor and 4GB RAM. The camera
used for the experiment is of 16.2 megapixels with 8x
optical zoom and 7.77 mm sensor size. The runtime
of the algorithm decreases with the decrease in size of
the images and number of faces present in the image.
Fig.7 and Fig. 8 are another examples of successful
application of the proposed algorithm.
The images shown in Fig. 8 are of size 4608 ×
3456 pixels and the associated focal length and base-
line are 13mm (7709.65 pixels) and 5cm respectively.
The depth of face, eyebrows (left and right), eyes (left
and right), tip of nose and lips computed by the al-
gorithm are 113cm, 113.29cm, 114cm, 112cm and
112.83cm respectively. From the obtained results it
can be seen that even the depth of the single feature
can give a close estimate of distance of face from the
camera.
The results obtained in Fig.2 and Fig.3 clearly
states that the proposed algorithm can work on im-
ages with any number of the facial images present in
the scene. The successful procurement of the depth
of facial images also depends on the successful de-
tection of the facial images. Any occluded face will
not be detected by the face detector and hence their
depths can not be estimated.
On poor quality images, ASM does not work ef-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
690

fectively. This is shown in Fig.6. It also goes for the
facial images which are at the large distance in the
image as the pixel information will not be sufficient
because of its small size for the model to work upon.
Hence, contours cannot be obtained successfully in
such images. Therefore, in such cases depth cannot
be estimated by this technique.
The relation given in equation 8 does not apply for
objects at large distances. This explains why the depth
calculated for the facial image in Fig.9 was incorrect.
6 CONCLUSIONS AND FUTURE
WORK
We have developed a novel method to recover the
sparse depth information of the persons whose faces
are present in a given scene. The approach relies on
the ASM features learnt for a given face and there-
fore does not require explicit computation of the fea-
ture detection for extracting the feature points. The
advantage with the proposed approach is that we can
even calculate the depth of the individual facial fea-
tures such as eyes and mouth when the images are
captured with sufficient zoom.
Figure 9: Image of a person standing at a large distance
(around 5 metres) from the camera. The image size is
4608 ×3456 pixels. In such cases, the pixel information
present in the facial region is not significant enough for the
proposed algorithm and also for the Viola-Jones face detec-
tion algorithm.
The comparison of our results with state-of-the-
art feature detection based sparse depth recovery tech-
niques needs to be performed for validation. We plan
to extend this approach to handle scenes which are
captured using low resolution cameras and also per-
sons who are located at much larger distance from
the camera. These challenging situations can be ad-
dressed by using various low level image processing
tools as a pre-processing step before using the pro-
posed algorithm. As the stereo cameras have made
their way into digital camera market, the proposed ap-
proach has the potential to provide information to the
user about the proximity of a person from the camera.
REFERENCES
Barnard, S. T. and Fischler, M. A. (1982). Computational
stereo. ACM Computing Surveys (CSUR), 14(4):553–
572.
Chakraborty, I., Cheng, H., and Javed, O. (2013). 3d vi-
sual proxemics: Recognizing human interactions in
3d from a single image. In IEEE CVPR, CVPR ’13,
pages 3406–3413.
Cootes, T. F., Edwards, G. J., and Taylor, C. J. (2001). Ac-
tive appearance models. Pattern Analysis and Ma-
chine Intelligence, IEEE Transactions on, 23(6):681–
685.
Cootes, T. F., Taylor, C. J., Cooper, D. H., and Graham,
J. (1995). Active shape models-their training and ap-
plication. Computer vision and image understanding,
61(1):38–59.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
2 edition.
Hoff, W. and Ahuja, N. (1989). Surfaces from stereo: In-
tegrating feature matching, disparity estimation, and
contour detection. Pattern Analysis and Machine In-
telligence, IEEE Transactions on, 11(2):121–136.
Kanade, T. and Okutomi, M. (1994). A stereo matching
algorithm with an adaptive window: Theory and ex-
periment. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 16(9):920–932.
Marr, D. and Poggio, T. (1971). Cooperative computation
of stereo disparity. Appl. Phys, 42:3451.
Matsumoto, Y. and Zelinsky, A. (2000). An algorithm for
real-time stereo vision implementation of head pose
and gaze direction measurement. In Automatic Face
and Gesture Recognition, 2000. Proceedings. Fourth
IEEE International Conference on, pages 499–504.
IEEE.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International journal of computer vision,
47(1-3):7–42.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors: a survey. Foundations and Trends
R
in Computer Graphics and Vision, 3(3):177–280.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57(2):137–154.
Zhao, W., Chellappa, R., Phillips, P. J., and Rosenfeld, A.
(2003). Face recognition: A literature survey. Acm
Computing Surveys (CSUR), 35(4):399–458.
FacialStereo:FacialDepthEstimationfromaStereoPair
691
