
Video Object Recognition and Modeling by SIFT Matching
Optimization
Alessandro Bruno, Luca Greco and Marco La Cascia
Dipartimento di Ingegneria Chimica, Gestionale, Informatica, Meccanica,
Università degli studi di Palermo, Palermo, Italy
Keywords: Object Modeling, Video Query, Object Recognition.
Abstract: In this paper we present a novel technique for object modeling and object recognition in video. Given a set
of videos containing 360 degrees views of objects we compute a model for each object, then we analyze
short videos to determine if the object depicted in the video is one of the modeled objects. The object model
is built from a video spanning a 360 degree view of the object taken against a uniform background. In order
to create the object model, the proposed techniques selects a few representative frames from each video and
local features of such frames. The object recognition is performed selecting a few frames from the query
video, extracting local features from each frame and looking for matches in all the representative frames
constituting the models of all the objects. If the number of matches exceed a fixed threshold the
corresponding object is considered the recognized objects .To evaluate our approach we acquired a dataset
of 25 videos representing 25 different objects and used these videos to build the objects model. Then we
took 25 test videos containing only one of the known objects and 5 videos containing only unknown objects.
Experiments showed that, despite a significant compression in the model, recognition results are
satisfactory.
1 INTRODUCTION
The ever-increasing popularity of mobile devices
such as smartphones and digital cameras, enables
new classes of dedicated applications of image
analysis such as mobile visual search, image
cropping, object detection, object recognition, data
representation (object modeling), etc.... Object
modeling and object recognition are two of the most
important issues in the field of computer vision.
Object modeling aims to give a compact and
complete representation of an object. Object models
can be used for many computer vision applications
such as object recognition and object indexing in
large database.
Object recognition is the core problem of
learning visual object categories and visual object
instance. Researchers of computer vision considered
two types of recognition: the specific object case and
the generic category case. In the specific case the
goal is to identify instances of a particular object. In
the generic category case the goal is to recognize
different instances of objects as belonging to the
same conceptual class. In this paper we focused our
attention on the first case (the specific instance of a
particular object). More in details we developed a
new technique for video object recognition and
modeling (data representation).
Matching and learning visual objects is a
challenge on a number of fronts. The instances of
the same object can appear very differently
depending on variables such as illumination
conditions, object pose, camera viewpoint, partial
occlusions, backgroud clutter.
Object recognition is accomplished by finding a
correspondence between certain features of the
image and comparable features of the object model.
The two most important issues that a method must
address are what constitutes a feature, and how is the
correspondence found between image features and
model features. Some methods use global features,
which summarize information about the entire
visible portion of an object, other methods use local
features invariant to affine transforms such as local
keypoints descriptors (Lowe, 2004).
We focus our work on methods that use local
features, such as local keypoints descriptors such as
SIFT.
662
Bruno A., Greco L. and La Cascia M..
Video Object Recognition and Modeling by SIFT Matching Optimization.
DOI: 10.5220/0004828006620670
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 662-670
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

The contributes of our paper are: a new technique
for object modeling; a new method for video object
recognition based on objects matching; a new video
dataset that consists of 360 degree video collection
of thirty objects (CVIPLab, 2013).
We suppose to analyze the case in which a person
take a video of an object with a videocamera and
then wants to know information about the object.
The scenario of our system is to upload the video to
a system able to recognize the video object taken by
the videocamera.
We developed a new model for video objects by
giving a very compact and complete description of
the object. We also developed a new video object
recognition
based on object matching that achieves
very good results in terms of accuracy.
The rest of this papers is organized as follows:
in section 2 we describe the related work of the state
of the arts in object modeling and object recognition;
in section 3 a detailed description of the video object
models dataset is given; in section 4 we describe the
proposed method for object recognition; in section 5
we show the experimental results; the section 6 ends
the paper with some conclusions and future works.
2 RELATED WORKS
In this section we show the most popular method for
object modeling and object recognition with
particular attention to video oriented methods.
2.1 Object Modeling
The most important factors in object retrieval are the
data representation (modeling) and the search
(matching) strategy. In (Li, 1999) the authors use
multiresolution modeling because it preserves
necessary details when they are appropriate at
various scales. Features such as color, texture, shape
are used to build object models, more particularly
GHT (the Generalized Hough Transform) is adopted
over the others shape representations because it is
robust againts noise and occlusion. Moreover it can
be applied hierarchically to describe the object at
multiple resolution.
In recogniton kernel (Li,1996) based method, the
features of an object are extracted at levels that are
the most appropriate to yield only the necessary
details; in (Day,1995) the authors proposed a
graphical data model for specifying spatio-temporal
semantics of video data for object detection and
recognition. The most important information used in
(Chen, 2002) are the relative spatial relationships of
the objects in function of time evolution. The model
is based on capturing the video content in terms of
video objects. The authors differentiate foreground
video objects and background video objects. The
method includes the detection of background video
objects, foreground video objects, static video
objects, moving video objects, motion vectors. In
(Sivic, 2006) Sivic et al. developed an approach to
object retrieval which localizes all the occurrences
of an object in a video. Given a query image of the
object, this is represented by a set of viewpoint
invariant region descriptors.
2.2 Object Recognition
Object recognition is one of the most important issue
in computer vision community. Some works use
video to detect moving objects by motion. In
(Kavitha, 2007), for example, the authors use two
consecutive frames to first estimate motion vectors
and then they perform edge detection using canny
detector. Estimated moving objects are updated with
a watershed based transformation and finally merged
to prevent over-segmentation.
In geometric based approaches (Mundy, 2006)
the main idea is that the geometric description of a
3D object allows the projected shape to be
accurately analyzed in a 2D image under projective
projection, thereby facilitating recognition process
using edge or boundary information.
The most notable appearance-based algorithm is
the eigenface method (Turk, 1991) applied in face
recognition. The underlying idea of this algorithm is
to compute eigenvectors from a set of vectors where
each one represents one face image as a raster scan
vector of gray-scale pixel values. The central idea of
feature-based object recognition algorithms lies in
finding interesting points, often occurring at
intensity discontinuity, that are invariant to change
due to scale, illumination and affine transformation.
Object recognition algorithms based on views or
appearances, are still a hot research topic (Zhao,
2004) (Wang, 2007). In (Pontil,1998)) Pontil et al.
proposed a method that recognize the objects also if
the objects are overlapped. In recognition systems
based on view, the dimensions of the extracted
features may be of several hundreds. After obtaining
the features of 3D object from 2D images, the 3D
object recognition is reduced to a classification
problem and features can be considered from the
perspective of pattern recognition. In (Murase, 1995)
the recognition problem is formulated as one of
appearance matching rather than shape matching.
The appearance of an object depends on its
VideoObjectRecognitionandModelingbySIFTMatchingOptimization
663

shape, reflectance properties, pose in the scene and
the illumination conditions. Shape and reflectance
are intrinsic properties of the object, on the contrary
pose and illumination vary from scene to scene. In
(Murase, 1995) the authors developed a compact
representation of objects, parameterized by object
pose and illumination (parametric eigenspace,
constructed by computing the most prominent
eigenvectors of the set) and the object is represented
as a manifold. The exact position of the projection
on the manifold determines the object's pose in the
image. The authors suppose that the objects in the
image are not occluded by others objects and
therefore can be segmented from the remaining
scene.
In (Lowe, 1999) the author developed an object
recognition system based on SIFT descriptors
(Lowe, 2004), more particularly, the author used
SIFT keypoints and descriptors as input to a nearest-
neighbor indexing method that identifies candidate
object matches. The features of SIFT descriptors are
invariant to image scaling, translation and rotation,
partially invariant to illumination changes and affine
or 3D projection. The SIFT keypoints are used as
input to a nearest-neighbor indexing method, this
identifies candidate object matches.
In (Wu, 2011) the authors analyzed the features
which characterize the difference of similar views to
recognize 3D objects. Principal Component Analysis
(PCA) and Kernel PCA (KPCA) are used to extract
features and then classify the 3D objects with
Support Vector Machine (SVM). The performances
of SVM, tested on Columbia Object Image Library
(COIL-100) have been compared. The best
performance is achieved by SVM with KPCA.
KPCA is used for feature extraction in view-based
3D object recognition.
In (Wu, 2011) different algorithms are shown by
comparing the performances only for four angles of
rotation (10° 20° 45° 90°). Furthermore, the
experimental results are based only on images with
dimensions 128 x 128.
Chang et al. (Chang, 1999) used the color co-
occurrence histogram (that adds geometric
information to the usual color histogram) for
recognizing objects in images. The authors
computed model of color co-occurrence histogram
based on images of known objects taken from
different points of view. The models are then
matched to sub-regions in test images to find the
object. Moreover they developed a mathematical
probabilistic model for adjusting the number of
colors in color co-occurrence histogram.
In (Jinda-Apiraksa, 2013) the focus is on the
problem of near-duplicates (ND), that are similar
images that can be divided in identical (IND) and
non-identical (NIND). IND is formed by
transformed versions of an initial image (i.e. blurred,
cropped, filtered), NIND by pictures containing the
same scene or objects. In this case, the subjectivity
of “how much” two image are similar is a hard
problem to face off. They present a NIND ground
truth derived by asking directly to ten subjects and
they make it available on the web.
A high-speed and high-performance ND retrieval
system is presented in the work of (Dong, 2012).
They use an entropy-based filtering to eliminate
points that can lead to false positive, like those
associated to near-empty regions, and a sketch
representation for filtered descriptors. Then they use
a query expansion method based on graph cut.
Recognizing in video includes the problem of
detection and in same cases tracking of the object.
The paper of (Chau, 2013) is an overview on
tracking algorithms classification where the authors
divide the different approaches in point, appearance
and silhouette tracking.
In our method we use SIFT for obtaining the
object model from multiple views (multiple frames)
of the object in the video. In our method the
recognition of the object is performed by matching
the keypoints of the sampled frames from the video
with the keypoints of the objects models. Similarly
to the method of Peng Chang et al. (Chang, 1999)
we used object modeling for object recognition but
we preferred to extract local features (SIFT) rather
than global features such as the color co-occurrence
histogram.
3 DATASET CREATION AND
OBJECT MODELING
The recognition algorithm is based on a collection of
models built from videos of known objects. To test
the performance of the proposed method we first
constructed a
dataset of videos representing several
objects. Then the modeling method is proposed.
3.1 Dataset
3.1.1 Video Description of the Object
For each object of the dataset the related video
contain a 360 degree view of the object starting from
a frontal position. This is done using a turntable, a
fixed camera and a uniform background. Video
resolution is 1280 x 720p (HD) at 30 fps and the
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
664

lenght is approximately 15 seconds.
3.1.2 Relation with Real Applications
This type of dataset try to simulate a simple video-
acquisition that can be done with a mobile device
(i.e. a smartphone) circumnavigating an object that
have to be added to the known object database. In
real application the resulting video have to be re-
elaborated, for example trying to estimate motion
velocity and jitter. If a video contain a partial view
of the object (i.e. less than 360 degree) recognition
task can be still performed but only for the visible
part of the object.
3.1.3 Image Dataset
The constructed dataset is formed by videos of 25
different objects. As the angular velocity of the
turntable is constant, a subset of 36 frame is sampled
uniformly for each object so extracting views that
differ by 10 degrees of rotation (see fig. 1). So,
starting from the video dataset, an image dataset is
also constructed with these samples containing 900
views of the 25 objects. Although original
background is uniform, shadows, light changes or
camera noise can produce a slightly changing
resulting color. In the extracted views the original
background is segmented and replaced with a real
uniform background (i.e. white) that not produce
SIFT keypoint, so storing only the visual
information about the object (fig. 2).
3.2 Object Modeling
Starting from the image dataset of 900 images a
reduced version is extacted to have, for each object,
only a subset of the initial 36 images representing
the visual model to be used for recognition.
3.2.1 Overview
For each object, the model is extracted as follow:
1. SIFT descriptors and keypoints are
calculated for all views;
2. for each view, only SIFT points that match
with points in previous or next view are used
as view descriptors;
3. the number of point of each view is used as
discrete function and local maxima and
minima are extracted;
4. object model is obtained taking images
corresponding to maxima and minima.
Figure 1: Complete 360 degree view of the video object.
Figure 2: On the right, the video object frame, on the left
the video object, without background.
3.2.2 Maxima and Minima Extraction
Rotating an object by few degrees, most part of the
object that is visible starting the rotation generally is
still visible at the end. This is related to the object
geometry (shape, occluding parts, symmetrics) and
the pattern features (color change, edges).
Calculating SIFT descriptors of two consecutive
views (views that differ by 10 degrees of rotation), it
is expected that a large part of the descriptors will
match.
For each view, if only the keypoints matching
with the previous and the next view are considered
and the others are discarded, the remaining
keypoints are representative of the shared visual
informations in a three images range. Only repeated
and visible points in at least two views are present in
the resulting subset. The number of remaining points
is used like a discrete similarity function and local
maxima and minima are extracted. Taking local
minima of this function, the related images are the
most visually different in their neighborhood, so
these represent views that contain a visual change of
the object. Local maxima, on the other hand,
correspond to pictures that contain common details
in their neighborhood, so being representative of
this. Only views corresponding to local maxima and
minima are used to model the object, so taking the
images that contain “typical” views (maxima) and
visual breaking views (minima) such as in fig. 3. In
Fig. 4 and 6 we plot a curve that shows, for a given
view (x-axis), the number of SIFT points that match
(y-axis) with points in previous or next view.
VideoObjectRecognitionandModelingbySIFTMatchingOptimization
665
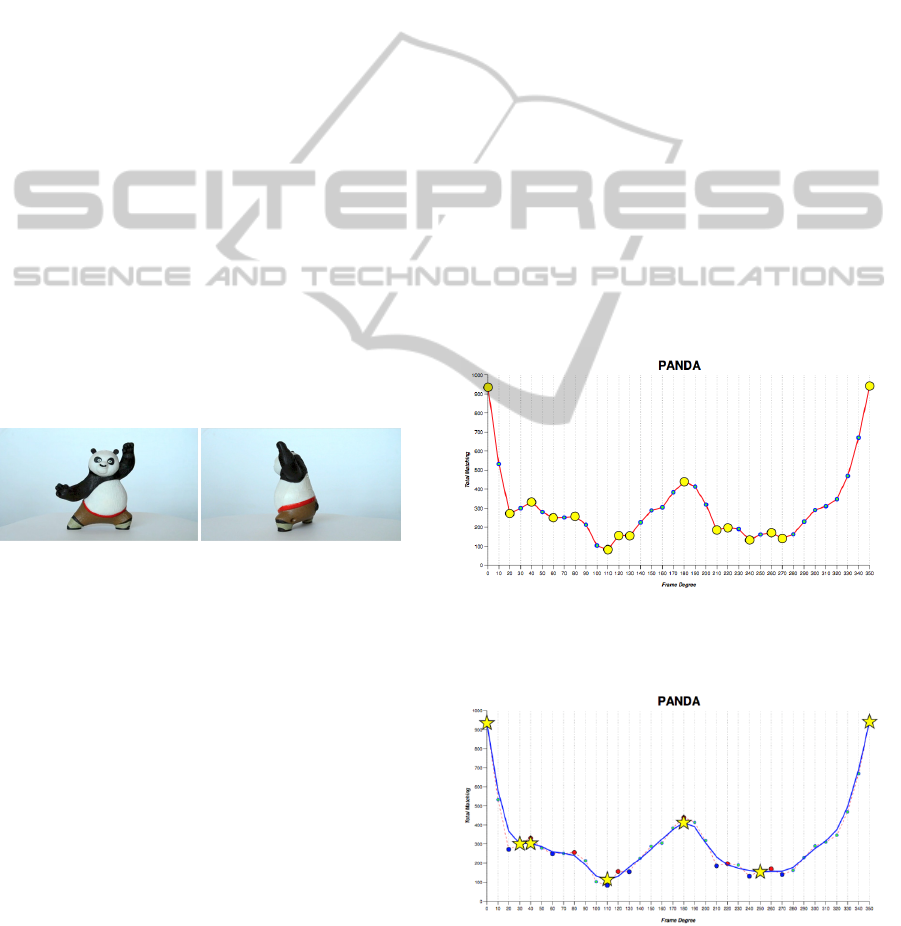
The curves shown in fig. 4 and 6 can be
characterized by a lot of local maxima and minima
that could correspond to views that are very close
each other. This would go in the opposite direction
from the objective of our method, that, on the
contrary, aims to represent the object with the fewest
possible views. This is the reason why we also apply
a 'smooth' interpolation function to the curves shown
in fig. 4 and 6. The results of 'smooth' interpolations
are depicted in fig. 5 and 7, showing curves very
close to the original ones (fig, 4 and 6). Furthermore
the curves in fig.5 and 7 have a number of local
maxima and minima lower than the curves in fig. 4
and 6. Since now on we call 'dataset model' the
model of the object that consists of 36 images/views
(that differ by 10 degree of rotation). We call 'full
model' the model that consists of the views that
correspond to local maxima and minima in not
smoothed curves (such as in fig. 4 and 6). We call
'smoothed model' the model that consists of the
views corresponding to local maxima and minima in
smoothed curves (as in fig. 5 and 7). In tab. 1 we
show, for each object, the size of full and smoothed
model and the model compression. The latter is the
ratio between the number of views composing the
current model (i.e. 'full model' or 'smoothed model')
and the number of views composing the 'dataset
model'.
Figure 3: On the left side, Panda Object View corresponds
to a local maxima (0 degree view) of the curve in fig. 4, on
the right side Panda Object View corresponds to a local
minima (110 degrees view) of the curve in fig.4.
4 PROPOSED RECOGNITION
METHOD
Given the dataset and the extracted object models,
we propose a method that performs recognition
using a video as query input. Input query video may
contain or not one of the known objects, the only
hypothesis on the video is that if it contains an
object of the database then the object is almost
always visible in the related video even if subject to
changes on scale and orientation.
4.1 Proposed Method
The proposed recognition follows this steps:
1. extract N frames from video query;
2. match every frame with all components of all
models;
3. counting the number of matching points for all
the views of the models and all frames of the
video, take the maximum value. The object
related to this match is the recognized object, if
the number of matches exceeds a fixed
threshold (10 in our experiments).
4.1.1 Refining Matches
If the models give a complete representation of the
appearance of the object, step two is crucial for
recognition task. Experimental results shows that
results can be corrupted in real-word query because
cluttered background can lead to incorrect or
multiple matches.results can be corrupted in real-
word query because cluttered background can lead
to incorrect or multiple matches. To make a more
robust matching phase, it is important to exclude
these noisy points. This can be done using RANSAC
Figure 4: The chart of matching keypoints for all views of
Panda Object. Yellow circles are local maxima and
minima.
Figure 5: The smoothed chart for Panda Object (blue line).
Yellow stars are local maxima and minima. Red dash line
is the original chart.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
666
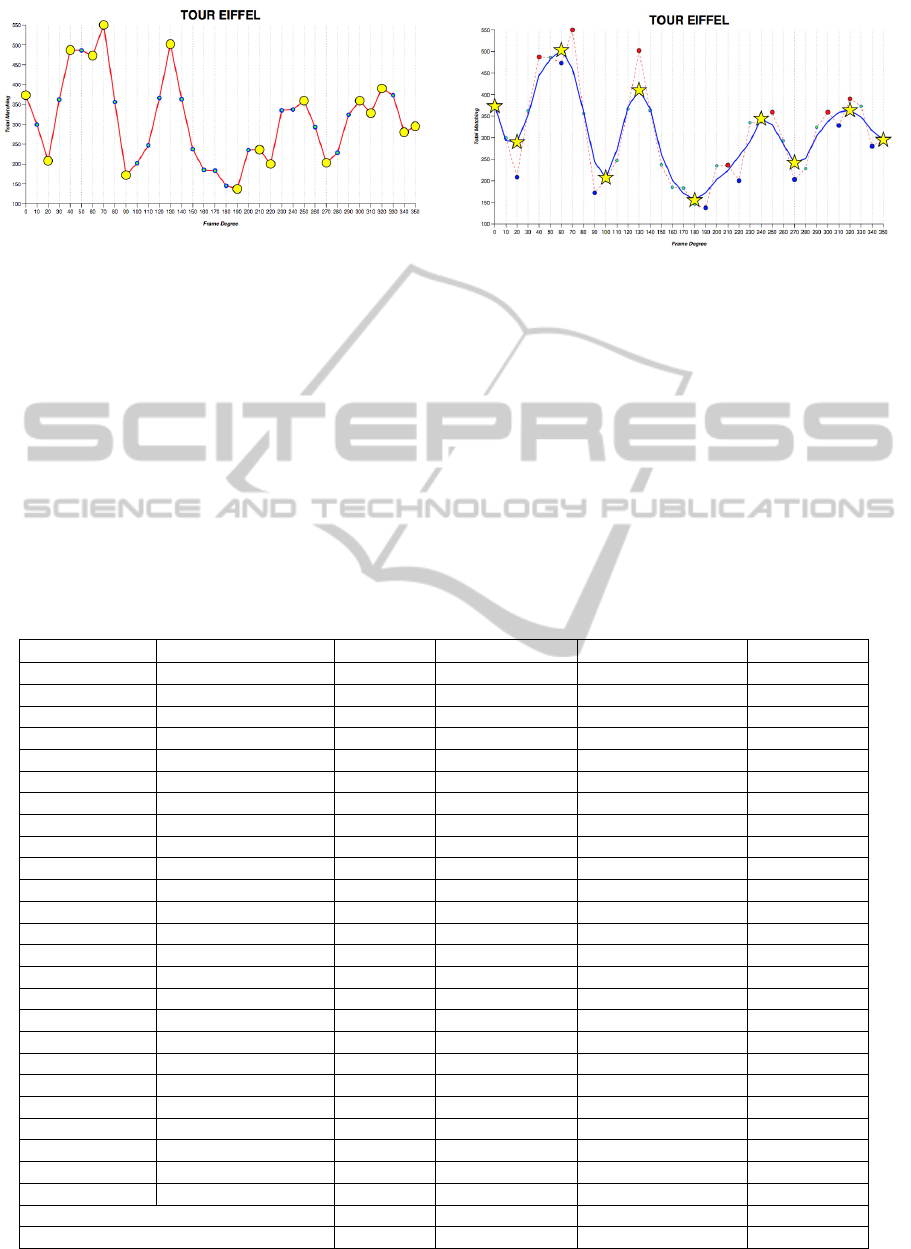
Figure 6: The chart of matching keypoints for all views of
Tour Eiffel Object. Yellow circles are local maxima and
minima.
(Fischler, 1981) in the matching operation, to
exclude points that don’t fit an homography
transformation (fig. 8). Furthermore, considering
that a single keypoint of an image can have more
than one match with keypoints of the second image,
we consider multiple matches of the same keypoint
as a single match.
Figure 7: The smoothed chart for Tour Eiffel Object.
Yellow stars are local maxima and minima. Red dash line
is the original chart.
5 RESULTS
Object recognition using video and image dataset
was done using the MATLAB implementation of
SIFT present in (Vedaldi, 2010) and RANSAC
implementation present in (Kovesi, 2003) following
the process described in section 4.1. To achieve
matches with less but more robust points the
Table 1: In this table, experimental results and statistical values about the video object modeling are shown: object id,
object name, the number of the views composing the object 'full model' and the object 'smoothed model', the compression
factor (i.e the ratio between the number of object model views and the number of all the object views in the dataset).
obj. ID
name full model compression smoothed model compression
1 Dancer 14 38.89% 10 27.78%
2 Bible 15 41.67% 9 25.00%
3 Beer 7 19.44% 5 13.89%
4 Cipster 12 33.33% 5 13.89%
5 Tour Eiffel 17 47.22% 10 27.78%
6 Energy Drink 17 47.22% 7 19.44%
7 Paper tissue 13 36.11% 13 36.11%
8 Digital camera 13 36.11% 7 19.44%
9 iPhone 13 36.11% 9 25.00%
10 Statue of Liberty 17 47.22% 11 30.56%
11 Motorcycle 9 25.00% 7 19.44%
12 Nutella 19 52.78% 9 25.00%
13 Sunglasses 23 63.89% 15 41.67%
14 Watch 16 44.44% 9 25.00%
15 Panda 15 41.67% 7 19.44%
16 Cactus 17 47.22% 11 30.56%
17 Plastic plant 19 52.78% 9 25.00%
18 Bottle of perfume 13 36.11% 5 13.89%
19 Shaving foam 10 27.78% 8 22.22%
20 Canned meat 20 55.56% 9 25.00%
21 Alarm clock (black) 15 41.67% 11 30.56%
22 Alarm clock (red) 15 41.67% 8 22.22%
23 Coffee cup 20 55.56% 11 30.56%
24 Cordless phone 15 41.67% 7 19.44%
25 Tuna can 17 47.22% 7 19.44%
Tot. 381 219
Mean Value 15.24 42.33% 8.76 24.33%
VideoObjectRecognitionandModelingbySIFTMatchingOptimization
667
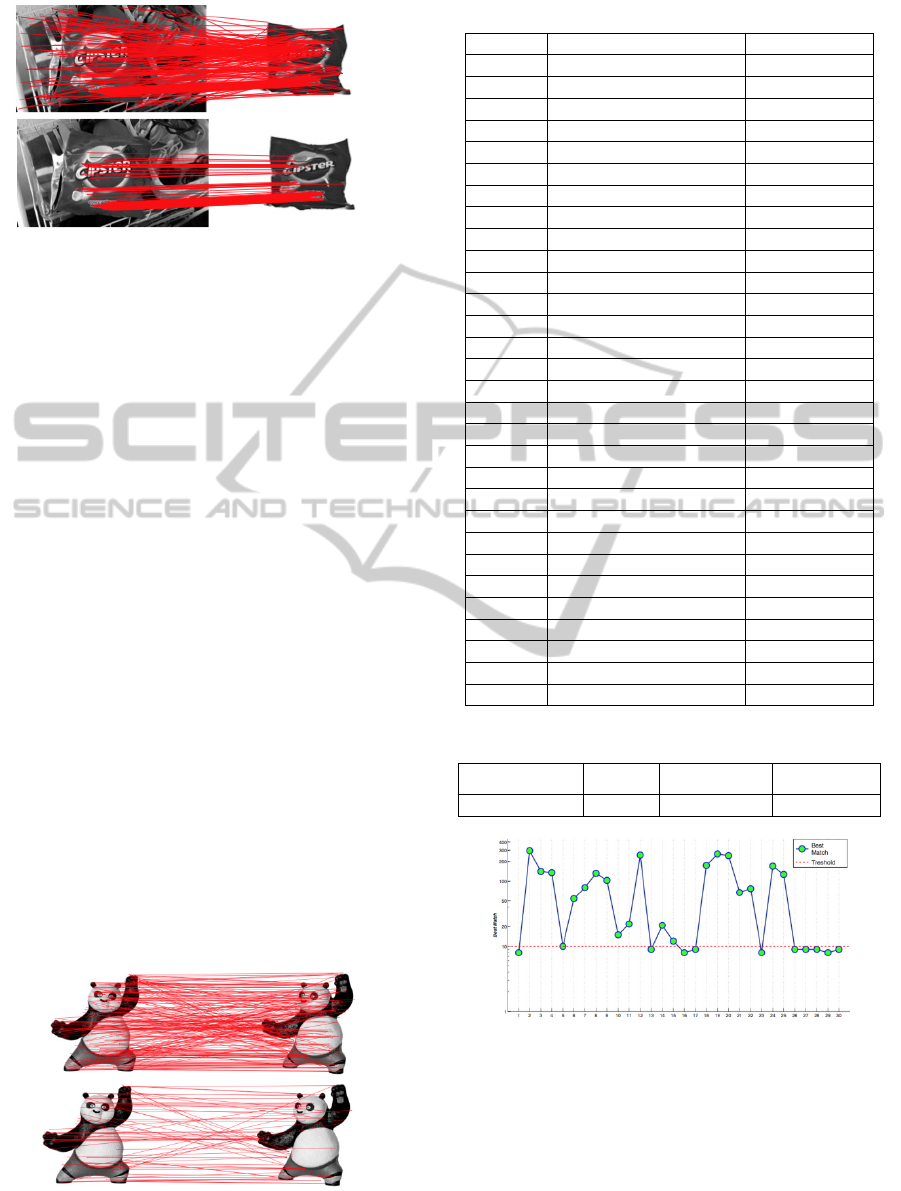
Figure 8: The images show the matches with (lower) and
without (upper) RANSAC.
threshold of the match function used was 2 instead
of the default 1.5 value. The difference of the
resulting number of points can be seen in fig. 9. The
proposed method was tested with 30 different
videos. Each video contains one of the known object
except five videos that contain unknown objects.
Query videos have an average length of 4 seconds
and the first step of the method is performed with a
uniform frame sampling rate fixing N (the number
of the selected frames per video) at 4 (so
approximately one frame for second). In fig. 10
best match number is shown with relationship to the
number of experiments (step 3). In step 3 the
selection of an appropriate threshold (10) is
performed by statistical analysis of the correct
match. The chart in fig. 10 shows that the best
matches, for each object, are distributed into two
major groups. In tab.2 recognition correctness
results are shown for each test video query,
including the original id and name for the present
object (or NO OBJ# for unknown object). Total
recognition performance is shown in tab. 3, with an
average precision of the system of 83%. The number
of matches performed is 291, so only 24% of the full
dataset dimension of 900. In fig. 8 an example of
correct recognition is shown. Fig. 11 shows the
matches for an unrecognized object (dancer) and for
a correct not recognition of unknown object.
Figure 9: Matching results with different thresholds: 2
(lower) and default value, 1.5 (upper).
Table 2: Video object recognition correctness results.
obj. ID name result
1 Dancer uncorrect
2 Bible correct
3 Beer correct
4 Cipster correct
5 Tour Eiffel correct
6 Energy Drink correct
7 Paper tissue correct
8 Digital camera correct
9 iPhone correct
10 Statue of Liberty correct
11 Motorcycle correct
12 Nutella correct
13 Sunglasses uncorrect
14 Watch correct
15 Panda correct
16 Cactus uncorrect
17 Plastic plant uncorrect
18 Bottle of perfume correct
19 Shaving foam correct
20 Canned meat correct
21 Alarm clock (black) correct
22 Alarm clock (red) correct
23 Coffee cup uncorrect
24 Cordless phone correct
25 Tuna can correct
NO OBJ1 correct
NO OBJ2 correct
NO OBJ3 correct
NO OBJ4 correct
NO OBJ5 correct
Table 3: The precision of video object recognition system.
Testset size correct uncorrect precision
30 25 5 83.33%
Figure 10: The best matches results for each object and for
unknow objects (NO OBJ).
ACKNOWLEDGEMENTS
The authors wish to acknowledge Christian Caruso
for helping us in the implementation and
experimental phases.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
668

6 CONCLUSIONS AND FUTURE
WORKS
In this paper we proposed a new method for video
object recognition based on video object models.
The results of video object recognition, in terms of
accuracy are very encouraging (83%). We created a
video dataset of 25 video object, it consists of 360
degree-views of the objects. From the video dataset
an image dataset is also constructed by sampling the
video frames. It contains 900 views of the 25
objects. Our method for object modeling gives, as
result, a compact and complete representation of the
objects, it achieves almost 76% data compression of
the models. With regard to object recognition
method, one of the possible improvement is to refine
the selection of the frames for the query in the
objects models database. Given a video, the camera
motion could be estimated and the frame samples
extracted according to motion, for example trying to
get a frame every fixed angular displacing. Best
results should be reached using a sampling rate that
approximate the rate used in the dataset creation. If
the video is long enough to have a high number of
selected frames, the same modeling process could be
used in the query to increase time performance of
the recognition, preserving the accuracy taking only
the most relevant views.
Figure 11: Two examples of results: a false negative (the
dancer) and a true negative (unknown object).
REFERENCES
Li, Z. N., Zaiane, O. R., Tauber, Z., 1999. Illumination
Invariance and Object Model Content-Based Image
and Video Retrieval. In Journal of Visual
Communication and Image Representation, vol 10, pp
219-224.
Z. Li and B. Yan., 1996 Recognition Kernel for content-
based search. In Proc. IEEE Conf. on Systems, Man,
and Cybernetics, pages 472-477.
Day, Y. F., Dagtas, S., Iino, M., Khokhar, A., Ghafoor, A.,
1995. Object-oriented conceptual modeling of video
data. In Proceedings of the Eleventh International
Conference on Data Engineering.
Chen, L., Ozsu, M. T., 2002. Modeling of video objects in
a video databases. In Proceedings of IEEE
International Conference on Multimedia and Expo.
Sivic, J., Zisserman, A., 2006. Video Google: Efficient
visual search of videos. In Toward Category-Level
Object Recognition, pp. 127-144, Springer.
Vedaldi, A., Fulkerson, B., 2010. VLFeat: An open and
portable library of computer vision algorithms. In
Proceedings of the International Conference on
Multimedia.
Kavitha, G., Chandra, M. D., Shanmugan, J., 2007. Video
Object Extraction Using Model Matching Technique:
A Novel Approach. In 14th IWSSIP, 2007 and 6th
EURASIP Conference focused on Speech and Image
Processing, Multimedia Communications and
Services, pp. 118-121.
Mundy, Joseph L. 2006. Object recognition in the
geometric era: A retrospective. Toward category-level
object recognition. pp.3-28.
Lowe, D.G., 2004. Distinctive Image Features from Scale-
Invariant Keypoints, In International Journal of
Computer Vision n. 60 vol.2 pp. 91-110, Springer.
Turk, M., Pentland, A., 1991. Eigenfaces for recognition.
In Journal of cognitive neuroscience vol.3, n.1, pp. 71-
86, MIT press.
Zhao, L. W., Luo, S. W., Liao, L. Z., 2004. 3D object
recognition and pose estimation using kernel PCA. In
Proceedings of 2004 International Conference on
Machine Learning and Cybernetics.
Wang, X. Z., Zhang, S. F., Li, J., 2007. View-based 3D
object recognition using wavelet multiscale singular-
value decomposition and support vector machine. In
ICWAPR.
Pontil, M., Verri, A., 1998. Support vector machines for
3D object recognition. In IEEE Transactions on
Pattern Analysis and Machine Intelligence, vol.20 n.6,
pp. 637-646.
Murase, H., Nayar, S. K., 1995. Visual learning and
recognition of 3-D objects from appearance. In
International journal of computer vision, vol.14 n.1,
pp. 5-24. Springer.
Lowe, D. G., 1999. Object recognition from local scale-
invariant features. In . The proceedings of the seventh
IEEE international conference on Computer vision.
Chang, P., Krumm, J., 1999. Object recognition with color
cooccurrence histograms. In IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition.
Wu, Y. J., Wang, X. M., Shang, F. H., 2011. Study on 3D
Object Recognition Based on KPCA-SVM. In
International Conference on Information and
Intelligent Computing, vol.18 pp. 55-60. IACSIT
Press, Singapore.
Fischler, Martin A and Bolles, Robert C.,1981. Random
sample consensus: a paradigm for model fitting with
applications to image analysis and automated
cartography In Communications of the ACM, vol. 24,
num.6, pp. 381–395.
VideoObjectRecognitionandModelingbySIFTMatchingOptimization
669

Kovesi, P., 2003. MATLAB and Octave Functions for
Computer Vision and Image Processing. [online]
Available at: <http://www.csse.uwa.edu.au/~pk>
[Accessed September 2013]
Jinda-Apiraksa, A., Vonikakis, V., Winkler, S., 2013.
California-ND: An annotated dataset for near-
duplicate detection in personal photo collections. In
Proceedings of 5th International Workshop on Quality
of Multimedia Experience (QoMEX), Klagenfurt,
Austria.
CVIPLab, 2013. Computer Vision & Image Processing
Lab, Università degli studi di Palermo Available at:
<https://www.dropbox.com/sh/sqkq03tsembdu4m/N1
mCVCFxGQ>
Dong, W., Wang, Z., Charikar, M., Li, K., 2012. High-
confidence near-duplicate image detection. In
Proceedings of the 2nd ACM International Conference
on Multimedia Retrieval.
Chau, D. P., Bremond, F., Thonnat, M., 2013. Object
Tracking in Videos: Approaches and Issues. arXiv
preprint arXiv:1304.5212.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
670
