
Audiovisual Data Fusion for Successive Speakers Tracking
Quentin Labourey
1, 2
, Olivier Aycard
1
, Denis Pellerin
2
and Michele Rombaut
2
1
LIG, Grenoble, France
2
GIPSA-lab, Grenoble, France
Keywords:
Audiovisual Data Fusion, Skin Detection, Sound Source Tracking, Talking Face Tracking.
Abstract:
In this paper, a human speaker tracking method on audio and video data is presented. It is applied to con-
versation tracking with a robot. Audiovisual data fusion is performed in a two-steps process. Detection is
performed independently on each modality: face detection based on skin color on video data and sound source
localization based on the time delay of arrival on audio data. The results of those detection processes are then
fused thanks to an adaptation of bayesian filter to detect the speaker. The robot is able to detect the face of the
talking person and to detect a new speaker in a conversation.
1 INTRODUCTION
Over the last decades, robotics has taken a growing
importance, in our society and imagination as well
as in Science. Until a few years ago, ”robots” often
only amounted to sensors placed in the infrastructure.
Those types of sensors can make people feel ill-at-
ease because they are intrusive. Companions robots
that share the environment with humans are a way to
remedy the problem. They are equipped with sensors
and are able to perceive the behavior of people and in-
teract with them. There are various kinds of sensors,
such as video and audio sensors. However the data ac-
quired from those sensors is most of the time uncer-
tain, noisy or partial. That is why multi-sensor data
fusion is now an extremely prolific field of research,
as it allows to obtain more complete information from
partial data in a robust way.
This work presents a method based on audiovisual
data fusion for tracking the positions of the succes-
sive speakers of a human conversation with a robot
equipped with visual and audio sensors. The robot
must be able to detect the faces around him and
choose which one is the speaker. If the speaker is
not in the visual scene, he must be able to track his
position.
As the audio and video modalities are very differ-
ent, a late fusion seems adequate for the present work
(Snoek, 2005), where detection is performed on each
modalities and a final decision is taken as to where
the speaker is by fusing the detection results. It im-
plies that this work is based on three main axis:
FACE DETECTION ON VISUAL DATA: The lit-
erature on face detection is quite abundant. In
their survey of the state-of-the-art of face detection,
Zhang (Zhang and Zhang, 2010) show that most of
the recent works on face detection are feature-based
and appearance-based methods, where a classifier is
trained either with direct positive examples of faces
or with visual features extracted from faces (patterns,
edges, etc...). Although a lot of work with different
methods exist, such as Support Vector Machines (Os-
una et al., 1997) , Neural Networks (Vaillant et al.,
1994), one of the principle contribution of the last
decades on face contributions is Viola & Jones algo-
rithm (Viola and Jones, 2004).
AUDIO SOUND SOURCE LOCALIZATION: Vari-
ous methods exist to localize a sound source thanks
to microphone array. Brandstein (Brandstein and Sil-
verman, 1997) divides those methods into 3 broad
parts: steered-beamformer based methods, which are
probabilistic methods (Valin et al., 2004) and are
most of the time quite time-costly, high-resolution
spectral-estimation based methods, which are based
upon a spatiospectral correlation matrix, and time-
difference of arrival methods (Gustafsson and Gun-
narsson, 2003), which use the delay of arrival between
microphones and are widely spread on various com-
plexity levels.
FUSION OF THE RESULTS FROM BOTH MODAL-
ITIES: Various types of fusion methods exist in dif-
ferent fields, a large part of them being based ei-
ther on classifiers and machine learning (Rao and
Trivedi, 2008), or on estimation of the state of objects
(Nguyen and Choi, 2010). Hospedales (Hospedales
and Vijayakumar, 2008) worked on a similar problem
with unsupervised learning methods.
The method of the present work is a 2-steps pro-
696
Labourey Q., Aycard O., Pellerin D. and Rombaut M..
Audiovisual Data Fusion for Successive Speakers Tracking.
DOI: 10.5220/0004852506960701
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 696-701
ISBN: 978-989-758-003-1
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
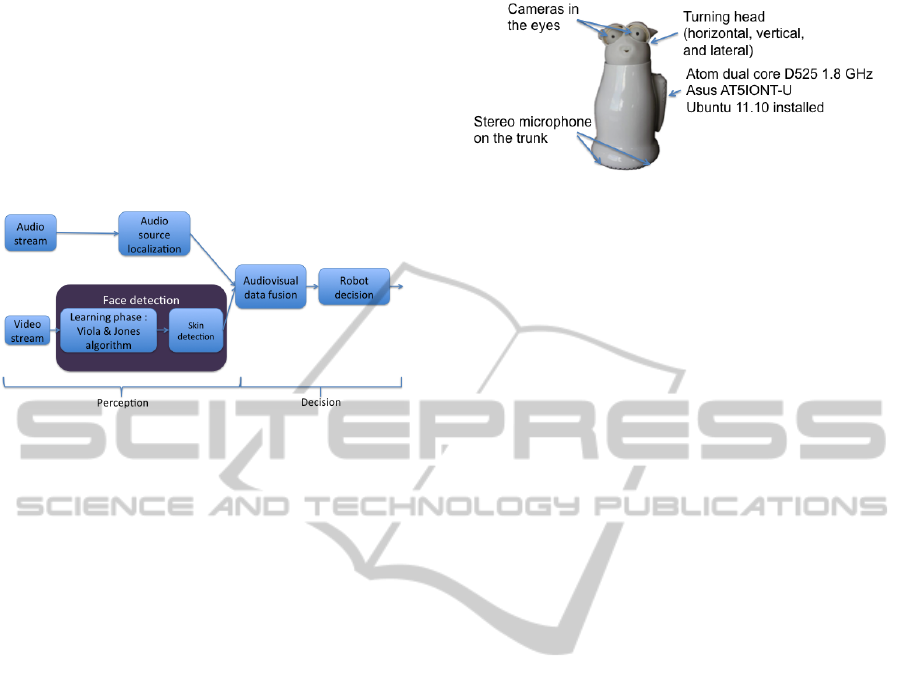
cess (figure 1): In the perception step, faces are de-
tected on visual data thanks to a skin detection algo-
rithm based on naive bayesian classifiers while sound
source localization is performed on audio data thanks
to the cross-correlation method. In the decision step,
the results of the perception step are fused thanks to
an adaptation of bayesian filter. Finally the choice of
the position of the speaker is performed by the robot.
Figure 1: Speaker detection: the two steps of perception and
decision.
This method provides with a real-time and robust
way to keep track of the speaker in a conversation,
while being adapted to low-quality data (independent
from morphological patterns) and low-quality micro-
processors (only one scanning of each frame).
This article is elaborated as follows: Section 2 de-
scribes the features of the robot used in this work, sec-
tion 3 details the method for the detection on audio
and video modalities independently and section 4 de-
scribes the decision process thanks to the audiovisual
data fusion method. Finally, results are presented and
discussed in section 5.
2 EXPERIMENTAL PLAFTFORM
This section details the specifications of the robot
chosen to illustrate the speaker tracking method and
the features on which this work has been performed.
Reeti
R
(figure 2) is a ”humanoid” robot produced
by Robopec (www.reeti.fr/), in France. It is equipped
with low-cost sensors for perception (two cameras in
the eyes and a stereophonic microphone in the base),
and with servo-motors for action (turning the head
and face expressions).
The two cameras can be accessed simultaneously
and produce a 640x480 pixels color RGB video, at 10
frames per seconds. Only one camera is used instead
of steroscopic vision to be faster with a less complex
algorithm.The sound is acquired in stereo, with the
two channel inputs at 15 centimeters apart.
An important constraint is that the field of audio
localization covers the whole angular field in front of
Figure 2: Reeti
R
the robot.
the robot from 0 to 180 degrees, whereas the field of
visual detection covers only about 50 degrees.
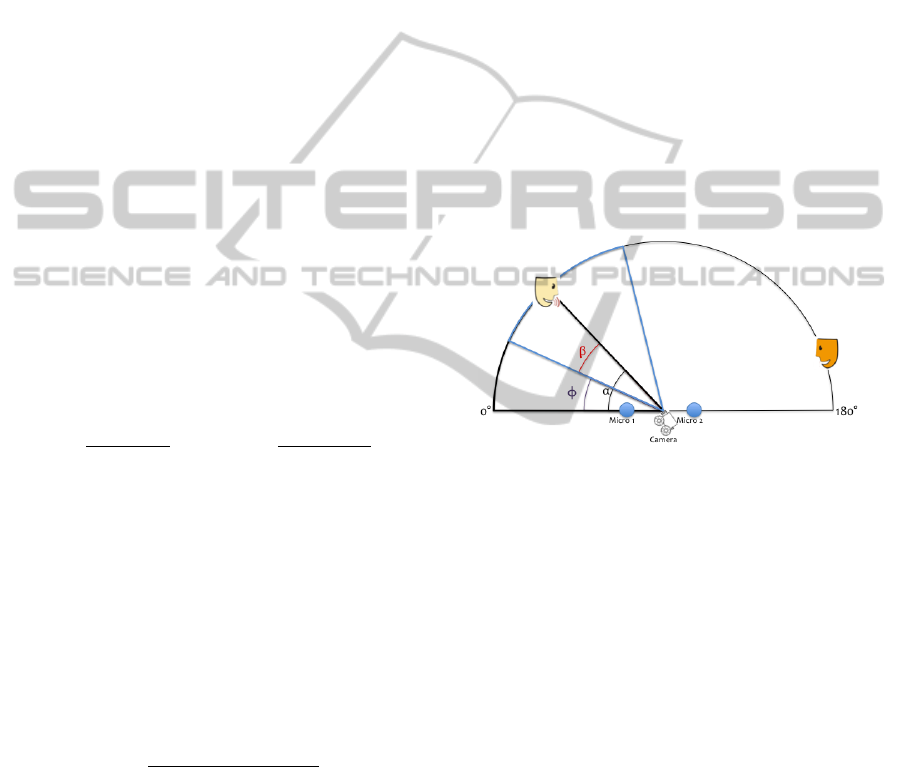
The global objective here is to track the angular
position α of the current speaker in a horizontal plane
with respect to the robot (figure 3).
3 PERCEPTION STEP
This section details our algorithms for face detection
from video data and sound source localization from
audio data.
3.1 Visual Data: Face and Skin
Detection
The goal of the video processing is the frame-by-
frame detection of the angular positions of every face
present in the visual scene with respect to the robot,
i.e. the process should give out a number N of angles
[α
1
, · · ·, α
N
], each of them being the estimated angular
position of a candidate face with respect to the robot
in a 2D horizontal plan.
Some particular cases can happen such as occlu-
sion (the faces can be fully or partially hidden by an
object like a hand, handkerchief, other person...), po-
sition changes (the faces may move during a conver-
sation and their angle and position change), lighting
changes (e.g. a person standing in front of a window
moves, etc...).
Viola & Jones algorithm (Viola and Jones, 2004)
performs very well on separate images with a high
rate of detection and a low rate of false alarms. How-
ever it is shown that the particular cases cited above
related to the dynamicity of human conversation make
the exclusive use of this algorithm unadapted to this
work. Besides, the needed algorithm must be able to
process a video stream in real-time, on a low-quality
microprocessor. In such context, Viola & Jones algo-
rithm cannot be used online and for each frame for
tracking as it is too time-costly, although it can be
used to obtain examples of face pixels.
This is why skin detection (Chai and Ngan, 1998)
is used, based on naive bayesian classifiers (Schnei-
AudiovisualDataFusionforSuccessiveSpeakersTracking
697
derman and Kanade, 1998) on the 3 video color chan-
nels. The proposed algorithm relies on three steps:
ONLINE CREATION OF THE TRAINING DATASET:
The training set is composed of skin (positive sam-
ples) and non-skin pixels (negative samples). To cre-
ate the actual training set, the Viola & Jones algorithm
is performed on each frame until some faces are de-
tected. The pixels that are detected as part of faces are
positive examples while those that are not are negative
examples. If necessary, to increase the number of pos-
itive samples, it is possible to perform Viola & Jones
on several successive frames.
TRAINING OF THE NAIVE BAYESIAN CLASSI-
FIERS: 3 classifiers are trained, one for each color
channel. Let R be the event ”The considered pixel
has a red value of R”, with R ∈ [0; 255] and C be
the event ”The considered pixel is a positive sample”.
From the training set, the aim is to learn the probabil-
ity distributions P(R|C) and P(R|¬C). This is done by
computing the histograms of the positive and negative
samples.
Let H
C,R
(i), i ∈ [0; 255], be the histogram com-
puted on all the positive samples of the training set on
the red channel, and H
¬C,R
(i) be the histogram com-
puted on all the negative samples of the training set
on the red channel. Then the probability distributions
P(R|C) and P(R|¬C) are computed as follows:
P(R|C) =
H
C,R
(R)
255
∑
i=0
H
C,R
(i)
, P(R|¬C) =
H
¬C,R
(R)
255
∑
i=0
H
¬C,R
(i)
(1)
A similar reasoning is performed to obtain the
probability distributions on the blue channel P(B|C)
and P(B|¬C), and on the green channel P(G|C) and
P(G|¬C) .
CLASSIFICATION OF INCOMING PIXELS: The
classification is made with the assumption that the
three color channels are independent. A score be-
tween 0 and 1 is given to each pixel. The higher the
score obtained is, the higher the chance that this pixel
is skin:
Score =
Score
skin
Score
skin
+ Score
¬skin
(2)
where
Score
skin
= η
1
· P(r|C) · P(g|C) · P(b|C)
Score
¬skin
= η
2
· P(r|¬C) · P(g|¬C) · P(b|¬C)
(3)
with η
1
and η
2
as normalization parameters, and r,g,b
respectively the red, green and blue values of the
pixel.
Each incoming frame is processed with the naive
bayesian classifiers. At the end of the classification,
0 or more skin regions are detected. Each detected
skin region with a number of pixels under an arbitrary
number of pixels (decided depending on the minimal
size of head to detect) is removed: it enables to get rid
of noise in the detection and to avoid keeping track of
very small regions of the images for the detection.
3.2 Video Angular Conversion
At the end of the frame processing, the centers of
gravity of the N detected skin regions are obtained,
with N ≥ 0.
The goal of the angular conversion is to transform
the x-value of each center of gravity into an angle be-
tween 0 and 180 degrees in a horizontal plane in the
robot coordinate system. The robot reference, defined
as the center of the head of the robot is used as the ori-
gin of the coordinate system.
In this work, it is considered that the camera ref-
erence is the same as the robot reference (figure 3).
Figure 3: Angular definition: view from above
The angular position of the center of gravity with
respect to the robot is computed as follows:
α = β + φ (4)
• φ is the angular position of the camera obtained
by linear conversion: 1 step between two camera
positions is equivalent to 1.27 degrees.
• β is the angular position of the pixel in the image,
obtained by linear conversion: 1 degree contains
13 pixels.
The skin detection process thus gives out a num-
ber N of angles [α
1
, · · ·, α
N
] with respect to the robot
at which candidates for faces are detected.
3.3 Audio Data: Sound Source
Localization
The goal of the audio data processing is to produce a
unique angle δ corresponding to the estimated angu-
lar position of the current speaker with respect to the
robot.
The hypotheses on the framework for sound source
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
698
localization are: one person is talking at a time, in a
silent environment (the noise is inherent to the micro-
phones and the robot’s motors and fan). For this work,
the detection does not have to be extremely precise as
it will be fused with the video data. Because only
two microphones are used and real-time processing is
required, it seemed thus logical to choose a state-of-
the-art cross-correlation method (C.C.M.) thanks to
the Time Difference of Arrival (T.D.O.A.) (Gustafs-
son and Gunnarsson, 2003) method.
4 DECISION STEP:
AUDIOVISUAL DATA FUSION
The perception step is performed on visual & au-
dio data at a period of 100 ms. The set of N faces
extracted at time t, called the set of video observa-
tions is noted O
v
t
=
α
1
t
, · · ·, α
N
t
, with N ≥ 0. In the
same manner, the unique audio observation at time t
is noted δ
t
. All the observations lie within a [0; 180]
range.
From those data, a decision has to be taken as
to where the speaker in the conversation is located.
Those observations are uncertain, and there is high va-
riety of possible visual and audio configurations. That
is why an adaptation of a bayesian filter is used (Thrun
et al., 2005) with a differentiation of cases similar to a
model rupture. The bayesian filter fits with the prob-
lem as it is a method to predict/estimate the state of a
system equipped with sensors from the observations
made by those sensors.
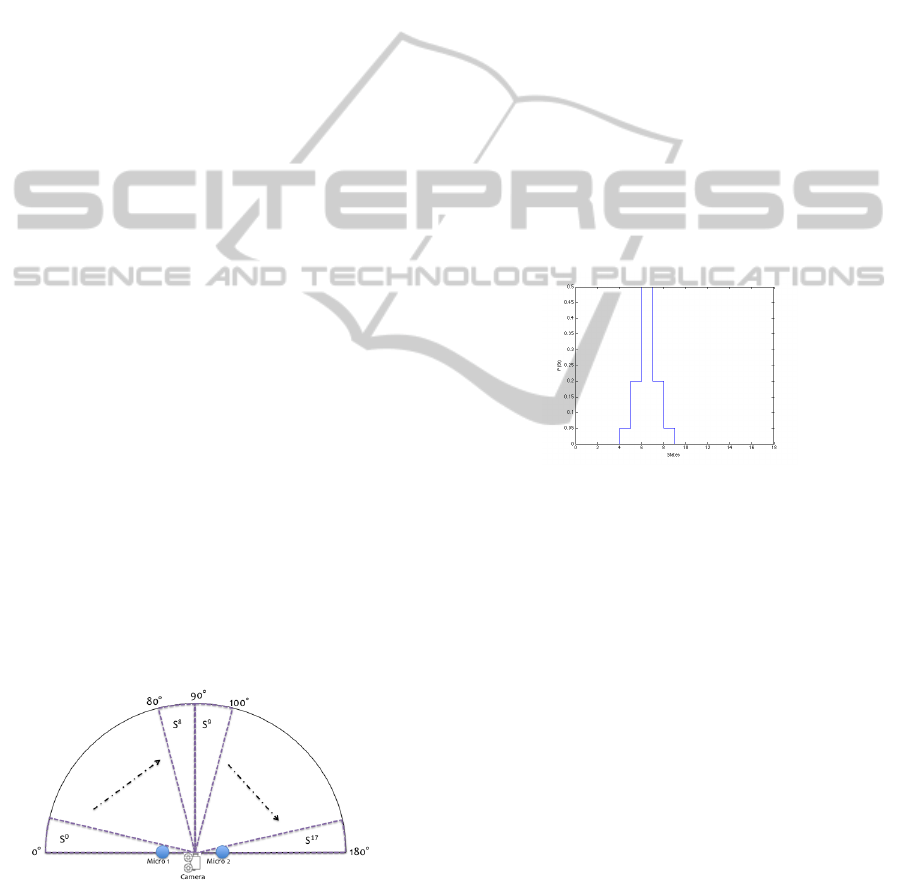
In the present case, the state S
t
of the system at
time t is the angular location of the speaker. As the
angular measures are uncertain, the angular field is
divided into 18 possible states, each of them being an
angular region 10 degrees wide (figure 4). The set of
states is noted S = (S
0
, · · ·, S
17
).
Figure 4: State repartition: 10 degrees for each state.
As the visual field is narrower than the field of au-
dio localization, the position of the head has an impact
on the model. There are 93 possible head positions
Po
1
, · · ·, Po
93
. The position of the head at time t is
noted Po
t
In the present section, the field of visual detec-
tion will indifferently be referred to as field of vision
(F.O.V.) or field of visual detection.
4.1 Dynamic Model
The dynamic model corresponds to the model of the
natural evolution of the conversation, i.e. the proba-
bility distribution P(S
t
|S
t−1
). Because the speaker in
a conversation can change at any time, it is difficult to
estimate the position at time t+1 of a speaker when it
is known at time t.
In first approximation, the evolution model is built
just to track the current speaker: it is considered that
from a time t to a time t+1, or in 100 ms interval, the
same person is still talking, even though this person
might have moved in between. The probability dis-
tribution P(S
t
|S
t−1
) is thus a discrete ”gaussian-like”
form around S
t−1
. Figure 5 is an example for S
t−1
=
S
6
.
Figure 5: Dynamic model: P(S
t
|S
6
).
The case where the speaker changes between t and
t+1 is not handled by this dynamic model.
This is considered thanks to a simplified version
of interacting multiple models (IMM) (Farmer et al.,
2002): when the information from both sensors or
only the audio sensor is in complete conflict with the
previous estimate, the information coming from the
previous estimate is nullified and a uniform distribu-
tion is used. This case is detailed a bit more later on
in this section.
4.2 Audio Sensor Model
The sensor model represents the trust put into the sen-
sor. Let P(δ
t
|S
t
) be the audio sensor model. The au-
dio measure is not highly precise. The probability of
δ
t
knowing S
t
should be a gaussian which mean-value
is the mean angular value of the angular interval S
t
and which variance σ
δ
is high. Figure 6 shows an ex-
ample of possible audio sensor model with σ
δ
= 20
for S
t
= S
7
. In this case the mean-value of the gaus-
sian is 75.
AudiovisualDataFusionforSuccessiveSpeakersTracking
699
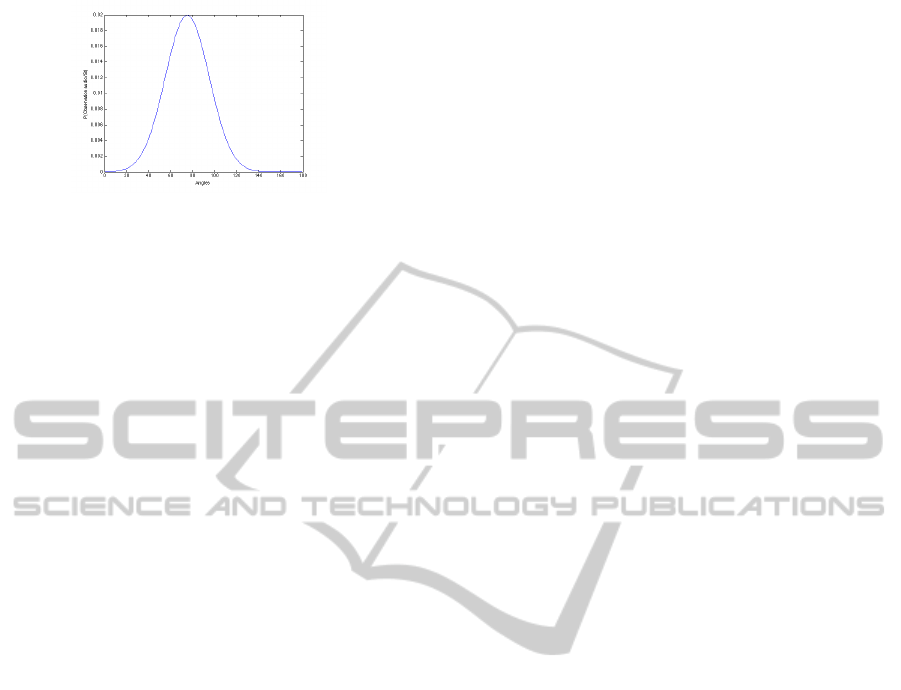
Figure 6: Dynamic model: P(δ
t
|S
7
), σ
δ
= 20.
4.3 Video Sensor Model
As the F.O.V. of the camera is not 180 wide, the obser-
vations depend on Po
t
, and the sensor model must be
computed at each iteration: The video sensor model
is in fact P(α
t
|S
t
, Po
t
). 2 separate cases must be re-
viewed for the video sensor model: if the speaker is
in the visual scene then the probability of detecting
a face is centered on the state in which the speaker
is. If he is not, the probability of detecting a face is
uniform.
P(α
t
|S
t
, Po
t
) =
U(α
t
), if S
t
∩ F.O.V. =
/
0
N (µ
α
, σ
α
) if S
t
∩ F.O.V. 6=
/
0
(5)
where U is the uniform distribution over α
t
, N (µ
α
σ
α
)
is a normal distribution of mean value µ
α
equal to the
mean value of S and of variance σ
α
= 10.
4.4 Estimation of P(S
t
|O
v
t
, δ
t
, Po
t
)
Once the dynamic model and the video models are de-
fined, the estimate of S
t
can be computed. Two main
cases have to be differentiated here:
THE SPEAKER IS IN THE VISUAL SCENE: If all
the present faces are well detected, one or more video
observations are available. There is a choice to be
made as to what visual observation is the best. This
is done by taking the video observation the closest to
the audio observation. The video observation α
t
used
for fusion is chosen as follows:
α
t
= arg min
α
i
t
∈O
v
t
(
α
i
t
− δ
t
) (6)
The fusion process is then the state-of-the-art pre-
diction/estimation process.
The prediction step is:
P(S
t
|α
0:t−1
, δ
0:t−1
, Po
1:t
) =
∑
S
t−1
(P(S
t
|S
t−1
) · P(S
t−1
|α
1:t−1
, δ
0:t−1
, Po
1:t−1
)) (7)
The estimation step is computed with the hypoth-
esis that the video and the audio sources are indepen-
dent:
P(S
t
|α
t
, δ
0:t
, Po
1:t
) =
η · P(δ
t
|S
t
) · P(α
t
|S
t
) · P(S
t
|δ
1:t−1
, α
0:t−1
, Po
1:t
) (8)
with η a normalization factor.
Between the iteration t and the iteration t+1, if the
speaker has changed, P(δ
t
|S
t
) and P(α
t
|S
t
) will over-
weight P (S
t−1
|α
1:t−1
, δ
0:t−1
, Po
1:t−1
) and modify the
model in a few iterations, corresponding to the delay.
Once the estimation is over, the probability dis-
tribution of the speaker location is known. The most
likely face video observation is chosen. Let ML be
the maximum of the location probability distribution.
ML = max
S∈S
(P(S
t
|α
0:t
, δ
0:t
, Po
1:t
)) (9)
The chosen video observation O
Final
is the closest
observation to ML.
THE SPEAKER IS NOT IN THE VISUAL FIELD:
The model has to change. A test has to be made on the
audio: if the audio observation is outside the video, it
is a model rupture, then the weight of the previous
estimate and the video observations are nullified and
only the audio observation is considered: the final ob-
servation is δ
t
.
5 RESULTS
Some results obtained from data extracted
from the robot can be observed on figure
7 and an example of full video is accessi-
ble on the internet at the following URL:
https://www.youtube.com/channel/UCl4mcfTKzB8orarl-
SC7qgg.
It is difficult to evaluate the method as there are
a lot of parameters that are linked to the experimen-
tal platform. However, some global remarks can be
made:
• The full perception-decision chain is performing
in real-time.
• The particular cases described in section 3.1 are
fixed by the skin detection.
• Even if the audio detection is rough, when fused
with the face detection it allows us to easily differ-
entiate between two persons side by side as long
as the space between their faces is bigger than the
resolution of skin detection, so that two video ob-
servations are made.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
700

Figure 7: Results of audiovisual data fusion for a conversa-
tion involving 2 speakers.
• The time of response when the speaker change is
no more than a few frames (around 4) before the
detection of the new speaker (figure 8).
• In the different videos that were tested the speaker
is always detected after some time
Figure 8: Detection of a new speaker among 3 persons after
a small delay.
6 CONCLUSIONS
This work focuses on three main issues: produce de-
tection methods on low-quality visual and audio data
from low-cost sensors, elaborate a robust audiovisual
data fusion method adapted to the situation, and make
the method follow a real-time constraint.
A full processing chain has been elaborated: it re-
lies on the independent processing of the audio stream
(sound source localization) and the video stream (face
detection), fused in a late fusion process to create the
decision. One of the main advantages of this process-
ing chain is that each of its links can be modified and
upgraded in future works. There are perspectives to
improve this processing chain: the robot should be
able to differentiate two speakers speaking at the same
time at this stage, and the detection process can be
improved by dealing with the bias introduced in the
coordinate system. A lot of improvement could come
from the inclusion of new sensors such as depth sen-
sors or laser sensors to discriminate between region of
interests to be explored directly instead of exploring
the whole frame at each time. Improvement can also
be made from using motion in the video, instead of
frame-by-frame processing.
This work has been partially supported by the
LabEx PERSYVAL-Lab (ANR-11-LABX-0025).
REFERENCES
Brandstein, M. S. and Silverman, H. F. (1997). A practi-
cal methodology for speech source localization with
microphone arrays. Computer Speech & Language.
Chai, D. and Ngan, K. (1998). Locating facial region of a
head-and-shoulders color image. In Automatic Face
and Gesture Recognition. Proc.
Farmer, M. E., Hsu, R., and Jain, A. K. (2002). Interacting
multiple model kalman filters for robust high speed
human motion tracking. ICPR’02.
Gustafsson, F. and Gunnarsson, F. (2003). Positioning
using time-difference of arrival measurements. In
ICASSP’03.
Hospedales, T. M. and Vijayakumar, S. (2008). Structure
inference for bayesian multisensory scene understand-
ing. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence.
Nguyen, Q. and Choi, J. (2010). Audio-visual data fusion
for tracking the direction of multiple speakers. In Con-
trol Automation and Systems.
Osuna, E., Freund, R., and Girosi, F. (1997). Training sup-
port vector machines: an application to face detection.
In CVPR’97.
Rao, B. D. and Trivedi, M. M. (2008). Multimodal infor-
mation fusion using the iterative decoding algorithm
and its application to audio-visual speech recognition.
In Acoustics, Speech, and Signal Processing, 2008.
Schneiderman, H. and Kanade, T. (1998). Probabilistic
modeling of local appearance and spatial relationships
for object recognition. In CVPR’98.
Snoek, C. G. M. (2005). Early versus late fusion in semantic
video analysis. ACM Multimedia.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilis-
tic Robotics (Intelligent Robotics and Autonomous
Agents). The MIT Press.
Vaillant, R., Monrocq, C., and Le Cun, Y. (1994). Origi-
nal approach for the localisation of objects in images.
Vision, Image and Signal Processing, IEEE Proc.
Valin, J.-M., Michaud, F., Hadjou, B., and Rouat, J. (2004).
Localization of simultaneous moving sound sources
for mobile robot using a frequency- domain steered
beamformer approach. In ICRA’04.
Viola, P. and Jones, M. (2004). Robust real-time face detec-
tion. IJCV’04.
Zhang, C. and Zhang, Z. (2010). A survey of recent ad-
vances in face detection.
AudiovisualDataFusionforSuccessiveSpeakersTracking
701
