
Online Non-rigid Structure-from-Motion based on a Keyframe
Representation of History
Simon Donn
´
e, Ljubomir Jovanov, Bart Goossens, Wilfried Philips and Aleksandra Pi
ˇ
zurica
Department of Telecommunications and Information Processing (TELIN), Ghent University, Ghent, Belgium
Keywords:
Computer Vision, On-line 3D Reconstruction, Non-rigid Structure-from-Motion, Subset Selection.
Abstract:
Non-rigid structure-from-motion in an on-line setting holds many promises for useful applications, and off-line
reconstruction techniques are already very advanced. Literature has only recently started focusing on on-line
reconstruction, with only a handful of existing techniques available. Here we propose a novel method of
history representation which utilizes the advances in off-line reconstruction. We represent the history as a set
of keyframes, a representative subset of all past frames. This history representation is used as side-information
in the estimation of individual frames. We expand the history as previously unseen frames arrive and compress
it again when its size grows too large. We evaluate the proposed method on some test sequences, focusing on
a human face in a conversation. While on-line algorithms can never perform as well as off-line methods as
they have less information available, our method compares favourably to the state of the art off-line methods.
1 INTRODUCTION
One of the most important problems in computer vi-
sion today is the reconstruction of the 3D geometry of
a scene based on one or more cameras capturing 2D
image sequences. Non-rigid structure-from-motion
is one of the fundamental computer vision problems,
with a large number of potential applications such as:
• 3D video: conversion of 2D movies into 3D,
• Human-computer interface (HCI): pose and ges-
ture estimation of the user,
• Minimal-invasion surgery: extraction of 3D infor-
mation from laparoscopic images to provide sur-
geons with more detailed information.
These are only some important applications of these
techniques, illustrating the importance of accurate
and on-line 3D reconstruction. In this paper we fo-
cus on a teleconference scenario: we wish to create a
more immersive user experience by only using a sin-
gle 2D camera. The goal is to estimate the 3D co-
ordinates for a series of feature points from an input
stream of their corresponding 2D observations, and to
do so in an on-line fashion.
The input 2D coordinates are assumed to be rea-
sonably accurate, but our model includes input noise,
for example from feature tracker inaccuracies. This
paper focuses on the case of only one camera. We
make no further assumptions about this camera: it
may be either static or moving compared to the ob-
ject and we do not restrict ourselves to a given cam-
era model in this stage, either perspective or ortho-
graphic.
We say that the (external) feature tracker detects
J feature points on the surface and that the camera is
represented by C parameters. Accordingly, in each
frame we wish to estimate 3J 3D coordinates and
C camera parameters using 2J observed 2D coordi-
nates: the problem is ill-posed without any restric-
tions on the possible solutions. The two major chal-
lenges are finding the best solution to this ill-posed
problem and doing so in an on-line fashion. While the
existing literature offers a plethora of solutions to the
ill-posed problem in an off-line scenario, on-line non-
rigid structure-from-motion has only recently been re-
ceiving attention with just a handful of publications at
the time of writing (Paladini et al., 2010; Agudo et al.,
2012; Tao et al., 2013).
2 EXISTING METHODS
Non-rigid structure-from-motion is in itself an ill-
posed problem: at each input frame we wish to esti-
mate 3J +C unknowns based on only 2J input values,
where the camera parameters may or may not include
movement depending on the specifics of the method
used. To lower the amount of unknowns that need to
723
Donné S., Jovanov L., Goossens B., Philips W. and Pižurica A..
Online Non-rigid Structure-from-Motion based on a Keyframe Representation of History.
DOI: 10.5220/0004871407230731
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (PANORAMA-2014), pages 723-731
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Illustration of a shape basis extracted with a shape space method.
be estimated, we assume a certain degree of knowl-
edge about the scene. The various methods are gener-
ally classified by the type of knowledge they assume.
2.1 Template-based Methods
The first option is to assume that the object being re-
constructed is well-known and that all of its possi-
ble behaviours are collected into a so-called template.
As illustrated in the literature, a linear space can ade-
quately represent deformations of a real, physical ob-
ject such as a human face (Blanz and Vetter, 1999;
Wang and Lai, 2008; Paysan et al., 2009). Such a tem-
plate effectively restricts the possible 3D point clouds
of the object to a K-dimensional subspace of the 3J-
dimensional space, with the template containing the
known subspace basis. This means we must estimate
K +C unknowns based on 2J input values, which is
more likely to be well-determined. Naturally, the di-
mensionality of the subspace is assumed to be signif-
icantly lower than 3J. If this were not the case, there
is little advantage from a template-based method.
2.2 Shape Basis Methods
Unfortunately, templates are often missing due to the
lack of any accurate knowledge about the deforming
object. We must therefore make less stringent as-
sumptions to reduce the number of unknowns. A re-
laxation of the assumption of the template methods
is that the possible constellations of the object’s point
cloud are indeed restricted to a K-dimensional sub-
space, but that the basis of this subspace is unknown
and must be estimated as well.
In this case K +C unknowns have to be estimated
for each frame, as well as 3JK unknowns globally for
the subspace basis (Bregler et al., 2000). Figure 1
shows an example of an estimated shape basis, and we
can see that this is similar to what one would expect a
template to contain.
In the seminal work of (Bregler et al., 2000) the
shape basis and the coefficients are extracted through
matrix factorization. Several methods improve this
seminal method, either in the method of estimation
or in the modelling of the object. Some of the most
important approaches consist of:
- an extension to non-linear manifolds for the pos-
sible constellations (Rabaud and Belongie, 2008;
Shaji and Chandran, 2008; Fayad et al., 2009; Go-
tardo and Martinez, 2011a);
- the use of a perspective rather than an ortho-
graphic camera model (Xiao and Kanade, 2005;
Hartley and Vidal, 2008);
- the use of Bayesian estimation (Torresani et al.,
2008; Zhou et al., 2012);
- the handling of missing data points (Lee et al.,
2011).
One of these approaches, probabilistic principal
component analysis (PPCA) (Torresani et al., 2008)
is one of the best performing methods when in the in-
put is perturbed by noise, courtesy of its explicit noise
modelling. It is the one we choose to champion for the
shape basis methods in later comparisons. Moreover,
this method is computationally faster than most other
methods, which is another point of importance con-
sidering our goal of an on-line reconstruction. This
method is explained in more detail later in this sec-
tion, because our proposed method relies on the same
modelling and on the same approach for the actual re-
construction.
To the best of our knowledge there exist, at of
the time of writing, only a handful of on-line non-
rigid structure-from-motion methods in the literature.
In (Paladini et al., 2010), the authors perform off-line
reconstruction on a bootstrap sequence, which results
in an initial estimate for the shape basis. Afterwards
this basis is used to estimate the subsequent frames
sequentially. The shape basis is then expanded us-
ing principal component analysis (PCA). While the
shape basis representation from (Paladini et al., 2010)
tends to collect a large amount of noise over time
in noise-perturbed sequences as it will keep adding
bases based on noises, it works well in the noise-free
case. The authors of (Tao et al., 2013) utilize an adap-
tation of PCA more suited for sequential use: Incre-
mental PCA (IPCA). They use a frame window to step
through the input sequence and update the shape ba-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
724

sis using IPCA. Their method requires a training in-
put set to estimate the prior distribution of shape basis
weights, however. Lastly, the use of an adapted Finite
Elements Method (FEM) is proposed (Agudo et al.,
2012). The major drawback of this FEM method is
that it requires an initialisation step wherein the ob-
ject behaves rigidly. This is a valid assumption in a
large number of cases, but we will focus on scenarios
where this requirement is not necessarily fulfilled.
2.3 Trajectory Basis Methods
Whereas shape basis approaches attempt to model
spatial coherence, trajectory basis methods exploit
temporal coherence: there is a high correlation be-
tween subsequent locations of a given point. These
methods model the point trajectories as elements of a
K-dimensional subspace. The optimal basis for each
input sequence can be estimated through principal
component analysis (PCA), but research has shown
this basis largely coincides with that of the discrete
cosine transform (DCT) (Akhter et al., 2011; Akhter
et al., 2008). A related method models the cam-
era as smoothly moving rather than the points: Col-
umn Space Fitting (Gotardo and Martinez, 2011b),
which we classify under trajectory basis methods in
this overview. It first estimates the camera behaviour
and then uses this knowledge to perform reconstruc-
tion more effectively. It is chosen to champion for the
trajectory basis methods in later comparisons.
2.4 Details of PPCA
Because our method uses the estimation framework
from (Torresani et al., 2008) we repeat the basics
here. This approach is based on the Bayesian mod-
elling of the tracking errors and the input noise. Let
us s
j,t
as the 3D coordinates of point j, d
t
as the 3D
camera translation, R
t
as the camera matrix and c
t
as
the camera scaling factor,(all in the t
th
frame). Un-
der the assumption of Gaussian measurement noise
n
j,t
∼ N (0;σ
2
I) we can then express the 2D obser-
vation p
j,t
of the j
th
point as a weak-perspective pro-
jection:
p
j,t
|{z}
2×1
= c
t
R
t
|{z}
2×3
( s
j,t
|{z}
3×1
+ d
t
|{z}
3×1
) + n
j,t
|{z}
2×1
(1)
In matrix notation, the observed locations of all
points in a given frame t are concatenated vertically
into p
t
:
p
t
|{z}
2J×1
= G
t
|{z}
2J×3J
( s
t
|{z}
3J×1
+ D
t
|{z}
3J×1
) + n
t
|{z}
2J×1
(2)
In this equation, G
t
contains J copies of c
t
R
t
on its
diagonal, and other entities are the vertically concate-
nated versions of their counterparts in Equation 1. We
now assume s
t
to be an element of a K-dimensional
manifold:
s
t
|{z}
3J×1
= s
|{z}
3J×1
+ V
|{z}
3J×K
z
t
|{z}
K×1
,
where s is an average 3D shape, and V holds the shape
basis vectors in its columns, which are weighted with
the deformation coefficients contained in z
t
.
Subsequently, the authors of (Torresani et al.,
2008) place a Gaussian prior on the deformation
weights: z
t
∼ N (0;I). The estimation of R
t
, s, V and
z
t
then amounts to a Bayesian scheme, which is called
probabilistic principal component analysis (PPCA).
Specifically, an expectation-maximization (EM) op-
timization is used for estimating the various parame-
ters. One final remark must be given about the local-
isation: without any fixed reference system, the loca-
tion of the camera and the object are only estimated
up to an affine transform. For ease of use we will as-
sume that the center of the observed object is the ori-
gin (and that this center does not fluctuate markedly
due to deformations). We will then express any move-
ment of either the real-life camera or the real-life ob-
ject as movements of our virtual camera, fixing the
object’s center at the virtual origin.
3 THE PROPOSED ON-LINE
RECONSTRUCTION
We can identify two large elements in any on-line
method: a method for history representation and one
for the sequential processing of the input. In an ini-
tial attempt for on-line reconstruction method we per-
formed the EM update equations using the informa-
tion from a sliding temporal window for all of the
unknowns. Due to small frame windows and slow-
moving cameras, this strategy typically resulted in a
degeneration of the shape basis and the resulting re-
construction because the frame window did not con-
tain enough vantage points for the object. In this
case, the latest estimations of the various unknowns
were used as a history representation: obviously this
history representation was too simplistic. This sec-
tion comprises the selection of a representative sub-
set, both on artificial 2D point clouds and our specific
problem, and the overview of our proposed method.
OnlineNon-rigidStructure-from-MotionbasedonaKeyframeRepresentationofHistory
725
3.1 History Representation with
Keyframes
A key element of any sequential or on-line algorithm
is the need to remember past input. Clearly, it is in-
tractable to simply memorize all past frames of a the-
oretically infinite sequence. We propose to use a set of
keyframes as a representation of all past input frames;
a sparse sampling of history, so to speak. We ex-
tract the shape basis for the shape subspace required
for the reconstruction from this history representation,
but we retain the entire subset as the history represen-
tation. The challenge is now the selection of such a set
of representative frames from all of the input frames.
3.1.1 General Subset Selection
The main goal of the keyframe selection procedure is
to select a set of frames which represent all the possi-
ble deformations of the object from as many vantage
points as possible. In order to achieve this goal, the
selection procedure should exclude all of the frames
that do not contribute any additional information to
the shape basis, eliminating duplicate frames from the
keyframe set.
A subset of representative frames is selected from
the full set, having much fewer elements. Due to the
combinatorial explosion, the number of possible ways
to select a subset from a larger set grows very quickly
with the size of the full set. Therefore, an exhaus-
tive comparison of all possible subsets of keyframes
is implausible and we resort to a heuristic subset se-
lection. Assuming that we can represent the elements
of the set as points in a Euclidean space, our goal is to
select a subset, the elements of which are uniformly
distributed throughout the bounds of the full set.
To select a subset with a given metric, we use
backward elimination. By starting from the full set
and removing one element at a time according to a
local criterion we remove the element whose exclu-
sion from the subset results in the best change of the
metric, e.g. one of the two elements lying closest to-
gether when maximizing the minimum distance: the
one lying closest to the rest of the subset.
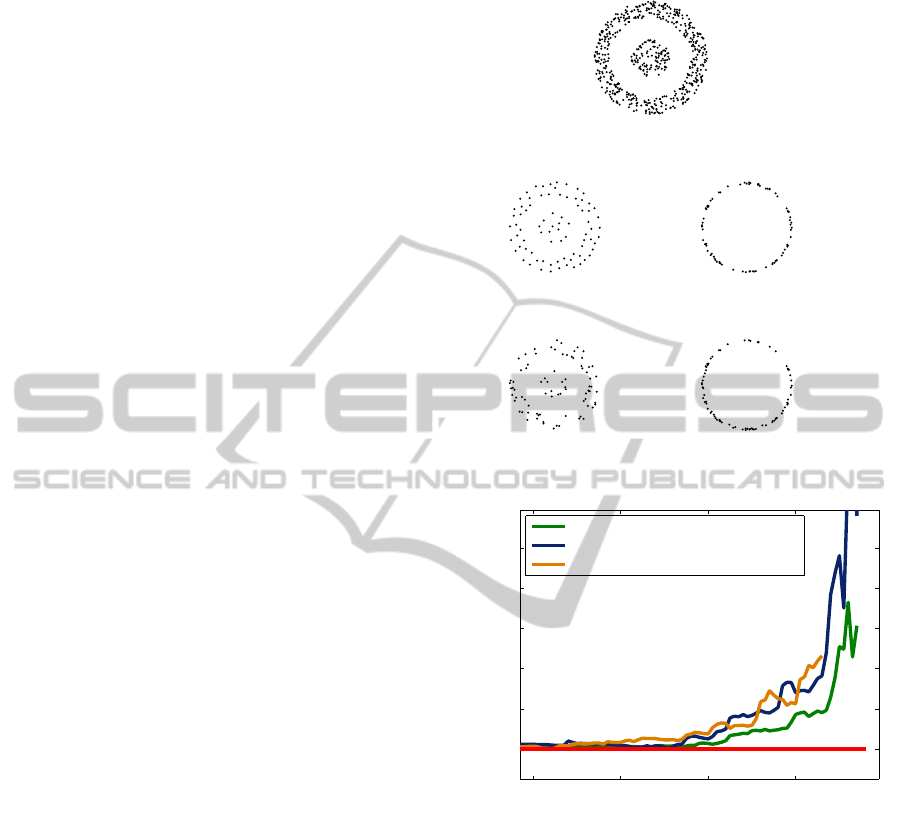
We illustrate four different metrics to maximize:
the minimum distance between any two elements of
the subset, the mean distance between all elements of
the subset, the mean distance between the elements of
the subset and those of the full set, and the differential
entropy of the subset. These metrics are heuristically
chosen so that their maximization results either in a
uniform density over the bounds (the minimum dis-
tance and the entropy), or in an accurate representa-
tion of the bounds (the mean distance).
Full set
Minimum distance Mean distance to the subset
Mean distance to the full setEntropy
Figure 2: Demonstration of the subset selection metrics on
an artificial 2D point cloud.
240 260 280 300
1
1.2
1.4
1.6
1.8
2
Number of frames removed
Euclidean reconstruction error
(normalized)
Distance in the shape space
Distance in the camera manifold
Entropy in the combined manifold
Figure 3: Keyframe selection using several metrics. The
input sequence is a 316-frame sequence of a person talking
from (Torresani et al., 2008).
The mean distance to the full set is included be-
cause it is computationally faster than the mean dis-
tance to the subset. For the first three metrics we re-
quire a meaningful distance to be defined between any
two elements in the set, a drawback the differential
entropy does not suffer from. To estimate the differ-
ential entropy, we use a Matlab wrapper for the TIM,
an open-source C++ library for efficient estimation of
information-theoretic measures (Rutanen, 2011).
The result of each of these strategies on the selec-
tion of a representative subset for an artificial 2D point
cloud are shown in Figure 2. We can see that maxi-
mizing the minimum distance between any two points
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
726

in the subset yields the most representative cloud,
while maximizing the mean distance represents the
edges well. The entropy metric gives disappointing
results, which we assume largely to be the result of
the difficulty of estimating the entropy of a continu-
ous variable based on a small number of samples.
3.1.2 Subset Selection for Keyframe Selection
Results shown in Figure 2 demeonstrate that it is pos-
sible to select a representative subset of 2D points
from a much larger set. In this section we investi-
gate whether this result also holds for selecting a set
of keyframes from the full set of frames, as illustrated
in Figure 4. The set of keyframes is said to be rep-
resentative to the full set if the reconstruction error is
not significantly affected by restricting the estimation
of the shape basis to the set of keyframes rather than
the full set. To this end, three metrics for the selection
of keyframes are investigated:
- the minimum distance in the shape space,
- the minimum distance in the camera manifold,
- the entropy in the combined shape-camera space.
We use the Euclidian distance between deformation
coefficients as the distance metric in the shape space.
In the camera manifold, the distance between two
camera parameter vectors is defined as the euclidean
distance between a given unit vector transformed to
the cameras’ reference system. The differential en-
tropy is retained as a metric in this paper because it
allows us to combine the deformation coefficients and
the camera parameters into a single metric, which is
not straightforward using distance-based metrics and
would require extensive research.
Figure 3 shows that the minimum distance on the
shape manifold results in a lower reconstruction error
than the other methods, indicating that the observa-
tion of the different deformations is more important
to the overall accuracy than the observation from dif-
ferent vantage points. The results were obtained on a
316-frame sequence from (Torresani et al., 2008) con-
sisting of a person talking to the camera. At each step,
we eliminate the frame which maximizes the respec-
tive metric and perform PPCA reconstruction restrict-
ing the estimation of the shape basis to the keyframes.
Figure 3 also shows that for keyframe set sizes of
about 35 frames there is little loss in accuracy.
3.2 Overview of the Proposed
Algorithm
We start by performing a 3D reconstruction of a boot-
strap sequence with an existing, off-line, reconstruc-
tion method. For this, any off-line reconstruction al-
gorithm can be used, but we have chosen the PPCA
method (Torresani et al., 2008) for simplicity. The
length of the bootstrap sequence must be chosen with
some care: choosing it too short will result in a rough
initialization, while choosing it too long will increase
the initialisation time. For the sequences used in
this paper we have found a bootstrap length of 60
frames to be a good middle ground. We select a
subset of frames from the bootstrap sequence which
accurately represents the whole of the bootstrap se-
quence, through the already discussed keyframe se-
lection. A rough initial reconstruction can be per-
formed for the bootstrap window (through a limita-
tion of the iteration count), which is sufficient for
keyframe selection and which we improve only for
the selected keyframes.
Throughout the execution of the program we will
add frames to the keyframe set, and we cull the
keyframe set using the subset selection whenever its
cardinality exceeds a certain imposed size (heuristi-
cally chosen to be 1.5 times the initial size). The
initial history size is also chosen manually, and tests
have shown (see for example Figure 3) that a set of 30
frames is an acceptable choice.
For the on-line processing, we reconstruct each
frame sequentially using the shape basis we have ex-
tracted from the keyframe set, initialising the camera
matrix using the last estimated value. This consists of
alternately optimizing the camera parameters and the
deformation coefficients for a set number of iterations
using the update steps from (Torresani et al., 2008).
In the next step we add the newly processed frame
to the keyframe set if it represents a deformation or
vantage point which is not yet represented in said set,
i.e. if the subset selection metric does not lower sig-
nificantly when including the newly processed frame.
At the point where the keyframe set has changed sig-
nificantly, i.e. it has grown to a predefined threshold,
we select a new subset of the large keyframe set to
serve as the new history representation from now on.
Finally, we extract an updated shape basis from the
updated history and continue with the on-line process-
ing. The update of the keyframe set and the extraction
of the new shape basis can be done in parallel with
the on-line reconstruction using parallel programming
paradigms (OpenMP or GPGPU). An overview of the
proposed algorithm is given in the form of a flowchart
in Figure 5.
3.3 GOP Processing
Estimating the 3D shape one frame at a time incurs a
large amount of overhead, because we are performing
OnlineNon-rigidStructure-from-MotionbasedonaKeyframeRepresentationofHistory
727
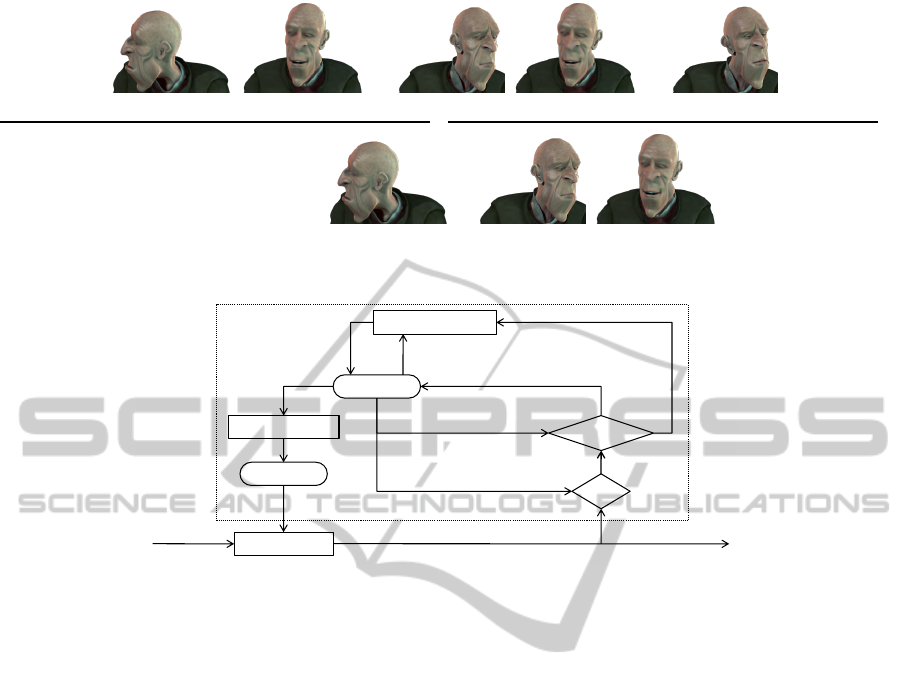
| {z }
Figure 4: Illustration of how the keyframe selection should work: any duplicate or near identical frames should be eliminated.
Images courtesy of the open-source video Elephant’s Dream (Team, 2006), featuring the character Proog.
estimation
frame input
HISTORY
keyframes
yes
new?
too many?
no
add
yes
3D output
subset selection
replace
shape basis
basis estimation
Figure 5: Overview of our proposed method.
calculations on small matrices: the overhead of the
calculations is large compared to the complexity of
the calculations. Group-of-pictures (GOP) process-
ing is possible in the proposed method due to the na-
ture of the optimization equations, which results in a
lower average overhead per frame. Processing multi-
ple frames at the same time comes with the disadvan-
tage of a higher latency, and therefore the end-user
will have to decide which point of the trade-off is op-
timal for their particular application.
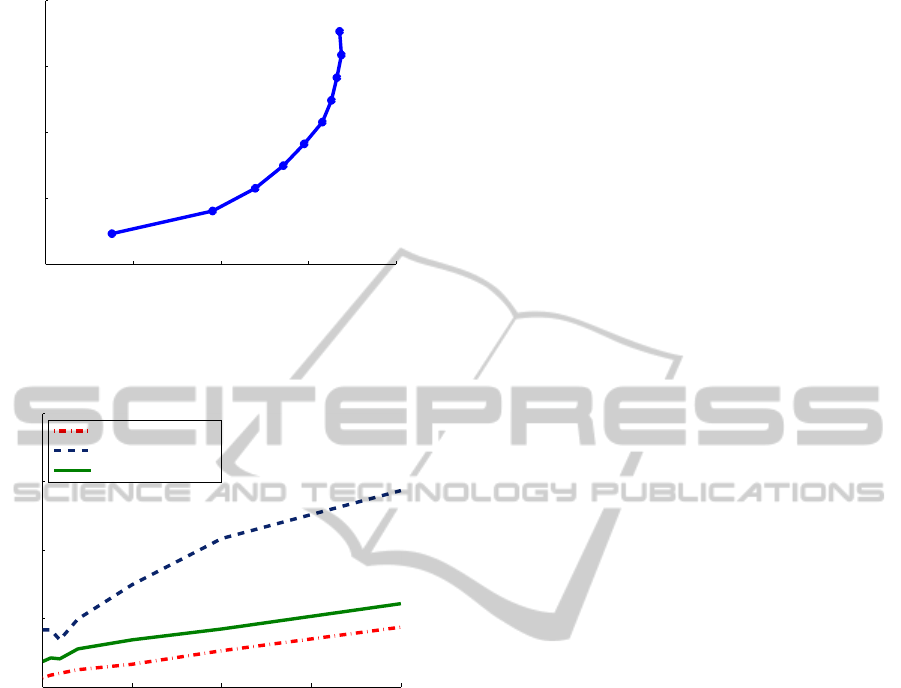
To illustrate the relationship between GOP size,
processing speed and latency, we vary the GOP size
from 1 to 10 and scatter the points (FPS
x
, Latency
x
)
in our Matlab implementation, as visible in Figure 6.
The latency displayed in the graph is the minimum
latency: to compute it we ignore the fact that the first
frame of a GOP must wait until the last frame of its
GOP is observed until the estimation of the GOP can
begin. Therefore, the displayed latency is the latency
for the last frame of a GOP. The actual choice of the
GOP size depends on the application: a large GOP
size may be applicable to off-line reconstruction of
a very long sequence because current off-line recon-
struction methods typically scale badly with rising se-
quence length, in computational complexity and/or
required memory. In this case, latency is of little inter-
est and the goal is to maximize the throughput while
avoiding the high memory use and complexity of off-
line methods.
4 RESULTS
4.1 Quantitative Results
In this section we present the result of the pro-
posed approach and compare it to some state-of-the-
art methods. It is important to note that the proposed
method is restricted to causal processing of the in-
put sequence: we reconstruct frame t using only the
observations from frames 1 through t. The existing
methods work off-line on the whole video sequence
and are not restricted by causality: for a more fair
comparison we can restrict these to causal reconstruc-
tion as well. We do this because we want to focus
our evaluation on the effectiveness of our history rep-
resentation. Assuming the methods are allocated a
bootstrap window of B frames, we can restrict them
to causal workings by reconstructing frame t using
only the frames 1, . . . , t. Clearly, this is not a prac-
tical way to perform reconstruction, but it gives an
indication of the performance of other methods in a
causal setting. Figure 7 shows the comparison be-
tween the proposed method and some state-of-the-
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
728
40 45 50 55 60
0
50
100
150
200
1
2
3
4
5
6
7
8
9
10
Frames per second (FPS)
Latency (ms)
Figure 6: Relationship between GOP size, processing speed
and minimum latency. Each data point is labeled by the
GOP size responsible for it.
0 0.5 1 1.5 2
0.02
0.04
0.06
0.08
0.1
Noise energy (%)
Euclidean reconstruction error
PPCA [14]
CSF [19]
Proposed method
Figure 7: Causal comparison between two existing methods
and our proposed method. The input sequence is consists of
a person talking, courtesy of (Torresani et al., 2008).
art methods (Gotardo and Martinez, 2011b; Torre-
sani et al., 2008). While the proposed method can
never perform a reconstruction of the same accuracy
as its off-line variant, because it does not retain the
same amount of information on previous frames, our
proposed method still compares favourably to the off-
line PPCA method and outperforms other state of the
art methods. Our proposed method has also inherited
the noise robustness of the Bayesian modelling from
the off-line PPCA, as illustrated by the equality of the
slopes.
These graphs of course do not reflect the immense
advantage of the on-line aspect of our method. There
is no entry for the first online method by (Paladini
et al., 2010) because it uses a threshold for the error
as an indicator of whether or not the model should
be expanded. The resulting line in the graph is there-
fore constant and does not reflect the downsides of
the method (extraordinary computational complexity
with rising noise). The graph was produced by per-
turbing the 316-frame sequence from (Torresani et al.,
2008) with zero-mean Gaussian noise (AWGN), re-
constructing the perturbed sequence with the vari-
ous methods and afterwards computing the average
3D error between the reconstructed point cloud and
the ground truth. The specific parameter values for
our method were: a 60-frame bootstrap length, a 40-
frame history representation size and 25 EM iterations
per frame.
4.2 Qualitative Results
Figure 8 puts these reconstruction errors into perspec-
tive: all three methods manage an accurate recon-
struction of the face from the sequence from (Tor-
resani et al., 2008). We also present a reconstruc-
tion by the three methods of the sequence extracted
from Elephant’s Dream (Team, 2006) in Figure 9. For
this comparison, we extract the projected points from
the video’s source and pass them as input to the re-
construction methods. Because the full mesh of the
Proog’s face has over 4000 points, we manually se-
lected a subset of 197 points to perform reconstruc-
tion on. After reconstruction, the resulting 3D mesh
is visualized by using the original texture from the
movie sources.
5 CONCLUSIONS
In this paper we have proposed a new method
for on-line non-rigid structure-from-motion based on
keyframe selection. While the literature on off-line
3D reconstruction has received a lot of attention and
several accurate techniques exist, relatively few ven-
tures have been made concerning on-line operation.
A new method of history representation using a set
of keyframes is described and evaluated, comparing
favourably to existing methods, performing similarly
to its off-line variant and outperforming other off-line
state-of-the-art methods.
We see two clear options for future work on on-
line non-rigid structure-from-motion: improving the
history representation and improving the estimation
of the separate frames. Sequential statistical estima-
tion, which is used to great effect in other fields, may
offer a more theoretical approach to history repre-
sentation. On the other hand, the estimation of the
separate frames can no doubt benefit from existing
methods in off-line reconstruction. The exploitation
of the temporal coherence through implementation of
a linear dynamic system as in (Torresani et al., 2008),
OnlineNon-rigidStructure-from-MotionbasedonaKeyframeRepresentationofHistory
729

CSF
PPCA
Proposed method
Figure 8: Visual comparison between three methods. The top row shows the original view point, and the bottom row shows
an alternate view point. Lines and points show the projection of reconstructed 3D points and their connections, while small
circles are centered around the ground truth locations.
(a) Original movie (b) CSF (c) PPCA (d) Proposed method
Figure 9: Visual comparison between two existing methods and our proposed method on a sequence extracted from Elephant’s
Dream (Team, 2006).
the PPCA-specific improvement of the camera update
equation as in (Qu et al., 2012), or other techniques
from off-line state-of-the-art offer possibilities for im-
provement.
ACKNOWLEDGEMENTS
The research for this paper was started in a master’s
thesis at Ghent University (at the TELIN department)
and finished during the start of a PhD funded by the
BOF under grant number 01D21213. Special thanks
go to Erwin Six and Donny Tytgat at the Alcatel Bell
Labs in Antwerp for their help and insights during the
early stages of the research.
REFERENCES
Agudo, A., Calvo, B., and Montiel, J. (2012). 3d reconstruc-
tion of non-rigid surfaces in real-time using wedge el-
ements. In Computer Vision ECCV 2012. Workshops
and Demonstrations, volume 7583 of Lecture Notes
in Computer Science, pages 113–122. Springer Berlin
Heidelberg.
Akhter, I., Sheikh, Y., Khan, S., and Kanade, T. (2011).
Trajectory space: A dual representation for nonrigid
structure from motion. IEEE Transactions on Pattern
Analysis and Machine Intelligence (TPAMI).
Akhter, I., Sheikh, Y. A., Khan, S., and Kanade, T. (2008).
Nonrigid structure from motion in trajectory space. In
Neural Information Processing Systems.
Blanz, V. and Vetter, T. (1999). A morphable model for
the synthesis of 3d faces. In Proceedings of the 26th
annual conference on Computer graphics and inter-
active techniques, SIGGRAPH ’99, pages 187–194,
New York and NY and USA. ACM Press/Addison-
Wesley Publishing Co.
Bregler, C., Hertzmann, A., and Biermann, H. (2000). Re-
covering non-rigid 3d shape from image streams. In
Computer Vision and Pattern Recognition and 2000.
Proceedings. IEEE Conference on, volume 2, pages
690 –696 vol.2.
Fayad, J., Bue, A. D., de Agapito, L., and Aguiar, P. (2009).
Non-rigid structure from motion using quadratic de-
formation models. In BMVC. British Machine Vision
Association.
Gotardo, P. and Martinez, A. (2011a). Kernel non-rigid
structure from motion. In Computer Vision (ICCV)
and 2011 IEEE International Conference on, pages
802 –809.
Gotardo, P. F. and Martinez, A. M. (2011b). Computing
smooth time trajectories for camera and deformable
shape in structure from motion with occlusion. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 33:2051–2065.
Hartley, R. and Vidal, R. (2008). Perspective nonrigid shape
and motion recovery. In In Proc. European Confer-
ence on Computer Vision, pages 276–289.
Lee, S. J., Park, K. R., and Kim, J. (2011). A sfm-based
3d face reconstruction method robust to self-occlusion
by using a shape conversion matrix. Pattern Recogn.,
44(7):1470–1486.
Paladini, M., Bartoli, A., and Agapito, L. (2010). Se-
quential non-rigid structure-from-motion with the 3d-
implicit low-rank shape model. In Proceedings of the
11th European conference on Computer vision: Part
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
730

II, ECCV’10, pages 15–28, Berlin and Heidelberg.
Springer-Verlag.
Paysan, P., Knothe, R., Amberg, B., Romdhani, S., and Vet-
ter, T. (2009). A 3d face model for pose and illumina-
tion invariant face recognition. In Advanced Video and
Signal Based Surveillance and 2009. AVSS ’09. Sixth
IEEE International Conference on, pages 296 –301.
Qu, C., Gao, H., and Ekenel, H. K. (2012). Rotation up-
date on manifold for non-rigid structure from motion.
IEEE International Conference on Image Processing.
Rabaud, V. and Belongie, S. (2008). Re-thinking non-rigid
structure from motion. In Computer Vision and Pat-
tern Recognition and 2008. CVPR 2008. IEEE Con-
ference on, pages 1 –8.
Rutanen, K. (2011). Tim, information-theoretic measures
in matlab. http://www.cs.tut.fi/ timhome/tim/tim.htm.
Shaji, A. and Chandran, S. (2008). Riemannian manifold
optimisation for non-rigid structure from motion. In
Computer Vision and Pattern Recognition Workshops
and 2008. CVPRW ’08. IEEE Computer Society Con-
ference on, pages 1 –6.
Tao, L., Mein, S. J., Quan, W., and Matuszewski, B. J.
(2013). Recursive non-rigid structure from motion
with online learned shape prior. Computer Vision and
Image Understanding, 117(10):1287 – 1298.
Team, O. O. M. (2006). Elephant’s dream.
http://www.elephantsdream.org/.
Torresani, L., Hertzmann, A., and Bregler, C. (2008). Non-
rigid structure-from-motion: Estimating shape and
motion with hierarchical priors. IEEE Transactions
on Pattern Analysis and Machine Intelligence.
Wang, S.-F. and Lai, S.-H. (2008). Estimating 3d face
model and facial deformation from a single image
based on expression manifold optimization. In Pro-
ceedings of the 10th European Conference on Com-
puter Vision: Part I, ECCV ’08, pages 589–602,
Berlin and Heidelberg. Springer-Verlag.
Xiao, J. and Kanade, T. (2005). Uncalibrated perspective
reconstruction of deformable structures. In Proceed-
ings of the Tenth IEEE International Conference on
Computer Vision - Volume 2, ICCV ’05, pages 1075–
1082, Washington and DC and USA. IEEE Computer
Society.
Zhou, H., Li, X., and Sadka, A. (2012). Nonrigid structure-
from-motion from 2-d images using markov chain
monte carlo. Multimedia and IEEE Transactions on,
14(1):168 –177.
OnlineNon-rigidStructure-from-MotionbasedonaKeyframeRepresentationofHistory
731
